

1. 서 론
2. 적응형 구동기 고장 허용 제어 및 성능 지수 기반 탐지 알고리즘
2.1. 다중 순환 최소 자승 기반 구동기 고장 허용 제어
2.2. 성능 지수 기반 구동기 고장 탐지
3. 성능평가 결과
4. 결 론
1. 서 론
자동차 구동기는 다양한 기능 부품들을 포함하고 있으며 이러한 부품들은 마찰 운동을 수행하는 부품이 존재한다. 차량 주행을 위해 구동기가 지속적으로 작동되면, 부품들은 시간이 지날수록 부품들 사이의 접촉으로 인해 마찰과 마멸이 발생하여 구동기에 고장 및 성능 저하를 유발한다. 자율주행 차량의 경우 구동기 고장 또는 성능 저하는 치명적인 사고를 발생시킬 수 있다. 그러므로 자율주행 차량의 구동기 고장 탐지 및 고장 허용 제어 기술 개발은 중요하다. 이에 자율주행 차량의 주행 안정성 향상을 위해 대학들에서는 고장 탐지 및 고장 허용 제어 기술 개발을 위해 다양한 연구들이 진행되고 있다.
Li 등(1)은 4륜 독립 조향 및 구동 전기 자동차의 구동기 고장 허용 제어를 위해 그룹화 슬라이딩 모드 제어 알고리즘을 제안하였다. Stetter(2)은 구조 차량의 슬립을 방지하기 위해 가상 센서 및 퍼지 가상 액추에이터를 구성하여 고장을 재건하고 허용 제어를 수행하는 알고리즘을 제안하였다. Chen 등(3)은 시간 지연이 있는 불확실한 액티브 조향 시스템과 구동기 고장 방지를 위해 타카기 수게노 퍼지 모델을 도입하고 퍼지 H∞ 제어기를 이용하여 고장 허용 제어 알고리즘을 제안하였다. Gao 등(4)은 전자식 파워 스티어링 시스템의 센서 고장을 예방을 위해 루엔버거 관측기와 선형 부등호 행렬을 이용하는 H∞ 성능 지수를 기반으로 고장을 추정하여 고장을 재건하고 허용 제어를 수행하는 알고리즘을 제안하였다. Jeon 등(5)은 전기 자동차의 인휠 모터 센서에 대한 고장 탐지를 위해 고장을 분류하고 고장 레벨에 따른 센서와 차량 동역학의 외란 사이의 상관관계 분석 및 패리티 방정식을 이용한 센서 통합 고장 진단 알고리즘을 개발하였다. Shahnazari 등(6)은 불확실성을 갖는 비선형 아핀 시스템의 구동기 및 센서 고장을 대응하기 위해 필터 뱅크를 이용하여 상태를 추정하고 예측되는 거동을 계산하여 고장 탐지 알고리즘을 제안하였다. Abci 등(7)은 다중 모바일 로봇 시스템의 구동기 및 센서 고장 감지를 위해 필터 뱅크와 Kullback-Leibler Divergence를 이용한 고장 감지 알고리즘을 제시하였다. Han 등(8)은 전환식 확률 시스템의 센서 및 구동기 고장 허용 제어를 위해 Reduced order observer를 이용하여 고장을 추정하고 이를 기반으로 고장 허용 제어 알고리즘을 제안하였다. Liu 등(9)은 타카기-수게노 퍼지 확률적 시스템의 센서 및 구동기 고장 대응을 위해 퍼지 슬라이딩 모드 관측기를 이용한 상태 추정을 기반으로 센서 및 구동기 고장 허용 제어 알고리즘을 제안하였다. Kommuri 등(10)은 영구자석 동기식 모터 기반 전기자동차의 센서 고장 대응을 위해 속도에 대한 임계값을 지정하여 도출되는 속도에 대한 지수를 이용한 고장 탐지와 고차 슬라이딩 모드 관측기 기반 고장 허용 제어 방법을 제시하였다. Mekki 등(11)은 모터 시스템의 고장 허용 제어를 위해 적분 슬라이딩 표면을 갖는 슬라이딩 모드 관측기와 슬라이딩 모드 제어기를 이용한 고장 허용 제어 알고리즘을 제안하며 제안된 알고리즘의 효율성을 입증하기 위해 다양한 고장 사례들을 연구하였다. Karras 등(12)은 전방향 모바일 로봇의 고장 허용 제어를 위해 각 모터 휠에 계측되는 전류의 잔차를 이용하여 고장을 감지하고 모델 예측 제어기 기반 고장 허용 제어 알고리즘을 제안하였다.
기존 연구를 살펴보면 고장 추정, 차량의 성능 지수를 이용한 고장 탐지 방법들을 제시하였다. 또한 슬라이딩 모드 제어기, 퍼지 제어기, H∞ 제어기 및 상태 되먹임 제어 방법들을 기반으로 고장 허용 제어 방법들이 연구되고 있음을 확인할 수 있다. 그러나 기존 알고리즘들은 정확한 모델이나 다양한 초기 파라미터들을 요구하는 것을 확인하였다. 이러한 한계점을 극복하기 위해 본 연구에서는 정확한 모델 또는 제어 파라미터가 필요 없는 종방향 자율주행을 위한 적응형 구동기 고장 허용 제어 알고리즘을 제안한다. 또한, 성능 지수 기반 고장 탐지 알고리즘을 제안한다. 본 연구의 주된 연구 내용은 다음과 같이 요약될 수 있다.
1) 적응형 되먹임 제어 규칙을 이용한 자율주행 자동차의 구동기 고장 허용 제어 알고리즘 개발
2) 제어 오차를 이용한 구동기 고장 탐지를 위한 성능 지수 개발 및 고장 단계 판단 알고리즘 개발
구동기 고장 허용 제어 알고리즘은 종방향 제어 수행을 위해 적응형 요구 가속도를 도출하도록 설계되었다. 요구 가속도는 되먹임 이득과 상대 거리 및 상대 속도에 대한 오차를 기반으로 계산되며 고장 허용 제어를 위해 적응 규칙을 이용하였다. 되먹임 이득은 순환 최소 자승으로 추정되는 계수들과 경사 하강법을 기반으로 실시간 갱신되는 적응형 이득을 이용하여 갱신되도록 설계하였다. 구동기 고장 탐지 알고리즘은 Window 기반 가중 표준 편차를 도출하고 성능 지수를 이용하여 고장을 탐지하고 단계를 구분한다. 성능 지수 도출을 위해 목표 및 현재 가속도 간의 오차를 기반으로 Wiindow 기반 가중 표준 편차가 계산된다. 가속도 오차는 부드러운 성능 지수를 도출을 위해 1계 전달함수가 적용되었다. 성능 지수는 0~100%의 값들이 선형적으로 도출되기 위해 두 개의 설계 변수들과 실시간 계산되는 Window 기반 가중 표준 편차를 이용하여 도출되도록 설계하였다. 또한, 구동기 고장 탐지 알고리즘은 구동기 고장 단계를 구분하기 위해 정상(Normal), 경고(Warning) 및 비상(Emergency) 구간 임계값들을 정의하여 도출된 성능 지수를 기반으로 구동기 고장 단계가 구분되도록 설계하였다. 본 논문에서 제안된 알고리즘 평가를 위해 Matlab/Simulink에 알고리즘을 구성하고 CarMaker를 이용하여 가상 환경에서 시뮬레이션을 수행하고 이에 대한 성능평가 결과들을 기술하고 분석하였다.
본 논문의 나머지 부분은 다음과 같이 구성되어 있다. 2 장에서는 적응형 구동기 고장 허용 제어 및 탐지 알고리즘에 대해 설명한다. 3 장에서는 제안된 알고리즘에 대한 성능평가 결과를 설명 및 분석하며, 4 장에서는 결론 및 한계점을 분석하고 향후 계획에 대해 기술한다.
2. 적응형 구동기 고장 허용 제어 및 성능 지수 기반 탐지 알고리즘
Fig. 1은 적응형 구동기 고장 허용 제어 및 탐지 알고리즘의 모델 개략도를 보여준다.
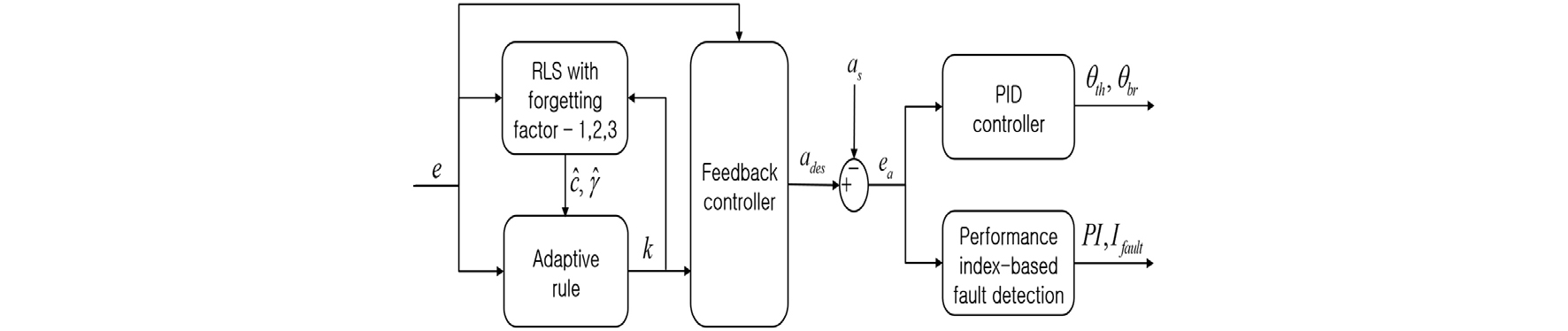
e는 상대거리 및 속도에 대한 제어 오차들을 의미하고, k는 요구 가속도(ades) 도출을 위한 되먹임 이득들이다. RLS with forgetting factor-1,2,3은 추정치() 및 적응형 이득()을 출력하도록 설계하였다. Adaptive rule 블록은 되먹임 이득을 갱신하여 요구 가속도를 도출한다. 요구 가속도는 현재 가속도와의 오차를 계산하기 위해 이용되었다. 계산된 오차는 비례-미분-적분(PID) 제어기와 성능 지수 기반 고장 검출 블록의 출력으로 각각 가속(θth) 및 감속 패달(θbr) 입력과 구동기 고장 탐지 지수를 출력한다. 다음 절에서는 구동기 고장 허용 제어를 위한 적응형 되먹임 제어(Adaptive feedback controller, AFC) 알고리즘에 대해 기술한다.
2.1. 다중 순환 최소 자승 기반 구동기 고장 허용 제어
요구 가속도는 구동기 고장 허용 제어를 위해 AFC를 기반으로 도출되며, 식은 다음과 같이 계산한다.
되먹임 이득은 적응 제어 규칙을 이용하여 갱신되도록 하였으며, 오차 변화율과 되먹임 이득 변화율 간의 관계를 가상 함수로 정의하였다. 정의된 가상 함수는 아래의 식들과 같다.
식 (2)와 (3)에서 c11, c12, c21, c22는 순환 최소 자승법을 이용하여 추정하며, 망각인자가 적용되었다. Fig. 2는 추정 계수들을 도출하기 위해 망각인자를 이용한 순환 최소 자승 모델의 모델 개략도이다.

순환 최소 자승법을 이용하여 도출된 추정 계수들은 적응형 되먹임 이득을 계산하기 위해 이용되었으며 이를 기반으로 되먹임 오차들에 관하여 다음과 같은 목적함수를 정의하였다.
적응형 되먹임 이득을 도출하기 위해 경사 하강법을 이용하였다. 정의된 식은 다음과 같다.
목적함수의 되먹임 이득에 대한 변화율을 가상 함수를 이용하여 되먹임 이득의 시간에 대한 변화율로 재정리하였다. 정리된 식은 다음과 같이 도출된다.
되먹임 이득의 변화율 크기는 되먹임 이득의 변화율들인 식 (6)과 (7)을 이용하여 계산되며 계산된 수식은 식 (8)과 같다.
식 (8)에서 되먹임 이득의 변화율 크기와 상대 거리 및 상대 속도 오차 간의 관계가 도출되었다. 도출된 관계식은 제어 오차가 0이 되는 경우 적응 이득 값이 0이 되기 위해 식 (9)와 같이 설계하였다. 식 (10)~(12)는 관계 함수를 정의하기 위한 수식들이다.
식 (9)에서 η는 적응 이득을 갱신하기 위한 설계변수를 나타내며, 적응형 이득 γ1, γ2는 추정 계수 와 같이 순환 최소 자승법을 이용하여 추정된다. Fig. 3은 적응형 이득을 추정하기 위한 모델 개략도이다.

Fig. 2와 3에서 순환 최소 자승은 각각 추정 계수 와 적응 이득 를 추정하기 위해 출력(y), 복귀자(Φ) 및 추정치(θ)를 정의하고 이들의 선형 관계식은 아래와 같다.
추정치, 순환 최소 자승 이득 및 공분산은 다음의 수식들을 이용하여 실시간으로 갱신된다. 실시간 계산 수식들은 아래와 같다.
추정된 계수들과 적응형 이득들은 되먹임 이득을 갱신하기 위해 이용되었다. 다음 절에서는 성능 지수 기반 구동기 고장 탐지에 대해 기술한다.
2.2. 성능 지수 기반 구동기 고장 탐지
성능 지수를 도출하기 위해 요구 가속도와 현재 가속도 간의 가속도 오차를 정의하였고 가속도 오차는 다음과 같다.
식 (21)에서 as는 차량의 가속도를 나타낸다. 구동기 고장 발생 경우 요구 가속도를 추종하지 못하여 구동기가 정상 상태일 경우와 비교적 큰 가속도 오차가 발생되며 이를 이용하여 구동기의 성능 지수를 도출한다. Fig. 4는 성능 지수 도출을 위한 개념도이다.
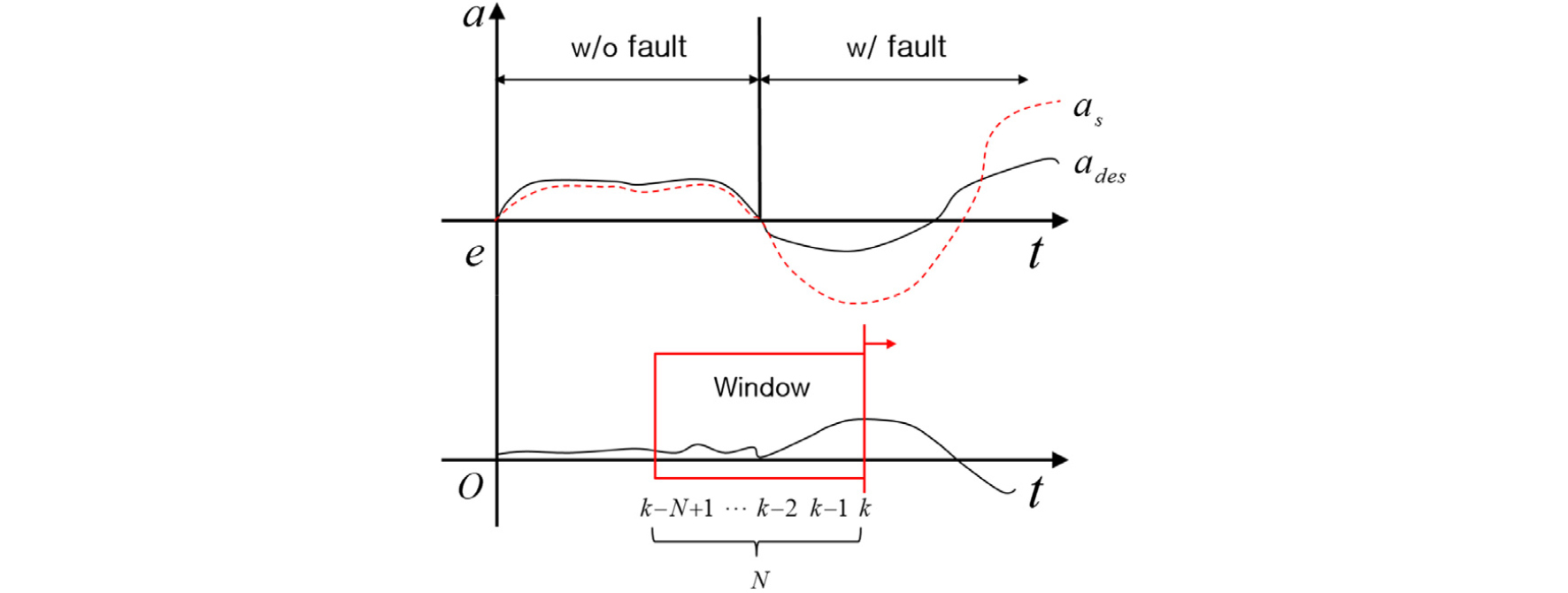
Fig. 4에서 Window는 N개의 데이터를 갖도록 제한하며, 성능 지수는 Window 기반 가속도 오차를 이용하도록 설계하였다. 성능 지수는 실시간 표준 편차를 기반으로 도출되며, 과거 데이터에 영향력을 줄이기 위해 가중치를 적용한 가속도 오차를 이용하여 실시간 표준 편차를 계산한다. 가중치는 0~1의 값을 갖는 5차 함수를 적용하였다. Fig. 5는 가속도 오차에 적용된 가중치 함수이다.
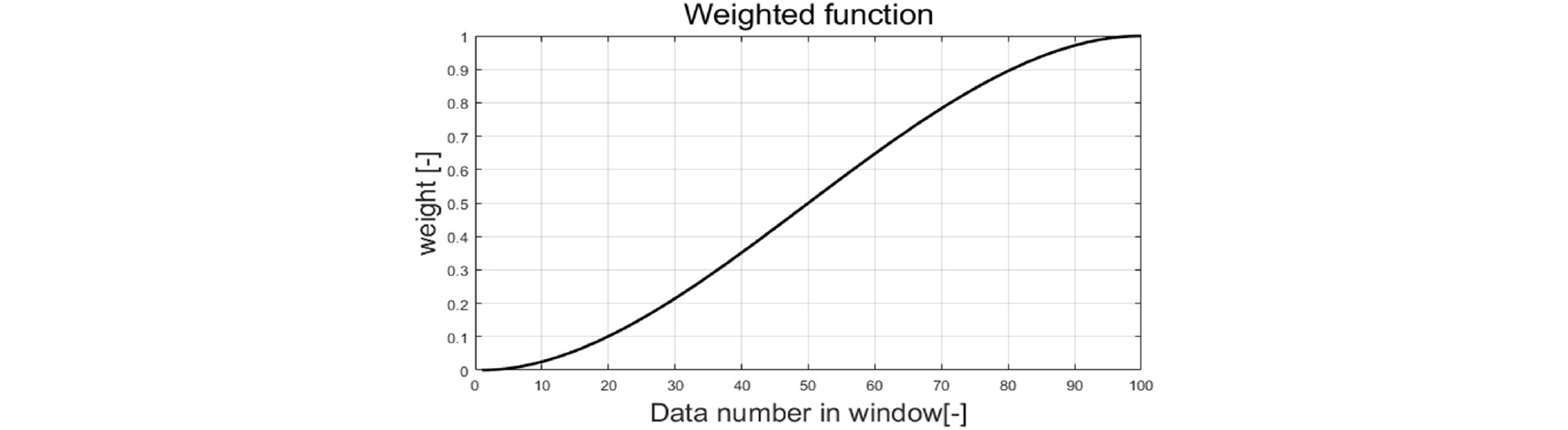
Fig. 5에서 정의역 범위는 1~100으로 제한한다. 가중치는 과거의 데이터 일수록 0에 가까운 가중치를 가지며 현재 데이터에 가까울수록 1에 가까운 가중치를 갖도록 가중치 함수를 설계하였다. 표준 편차와 가중치가 적용된 오차는 각각 식 (22)와 (23)과 같다.
식 (24)에서 부드러운 성능 지수를 도출하기 위해 시정수 τ를 이용하여 지연된 가속도 오차 edelay를 정의하였다. 식 (25)에서 가중치를 도출하는 5차 함수의 계수 a1, a2, a3, a4, a5, a6들은 각각 -2.58×10-11, -7.74×10-9, -2.84×10-6, 3.39×10-4, -6.7×10-4, 4.34×10-4을 갖도록 정의하였다. 식 (22)에서 μ는 제한된 Window 내에서 계산되는 평균을 의미한다. 성능 지수 정의를 위해 구동기 고장이 없는 정상 상태일 때의 표준 편차 3배 값(σth)과 표준 편차의 최댓값(σmax)을 정의하였다. 정의된 임계값들은 성능 지수 계산을 위한 경계 조건들로 이용하였다. 성능 지수와 경계 조건에 대한 식은 다음과 같다.
도출된 성능지수는 구동기 고장 탐지를 위해 이용하였으며 이를 기반으로 구동기 상태를 정상(Normal), 경고(Warning) 및 비상(Emergency) 단계로 고장을 구분하도록 고장 탐지 알고리즘을 설계하였다. Fig. 6은 성능 지수 기반 구동기 고장 탐지 알고리즘의 개념도를 나타낸다.
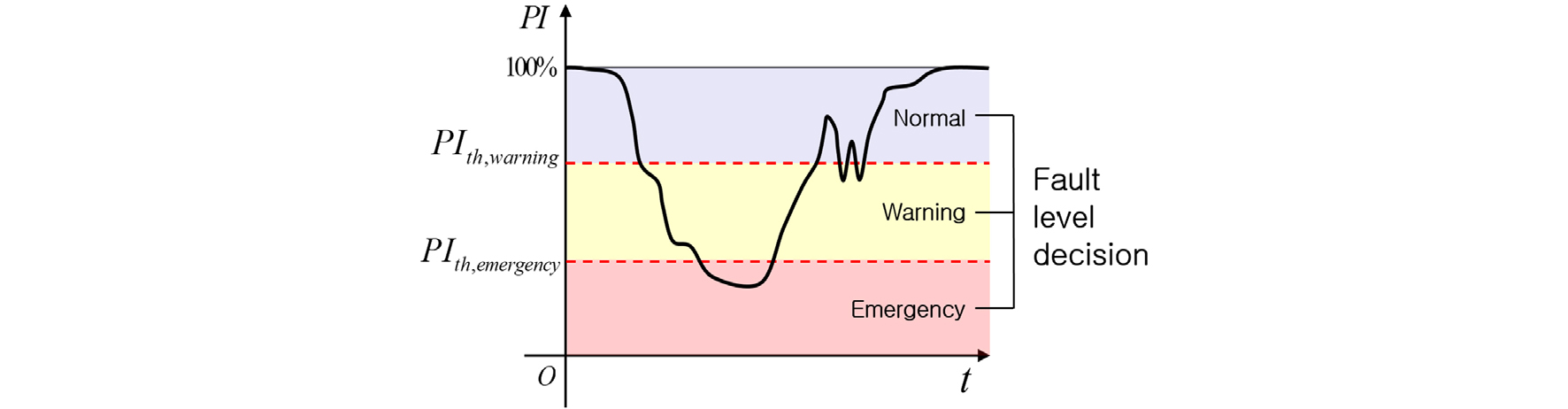
고장 허용 제어를 수행하기 위해 요구 가속도가 갱신되며 현재 가속도와의 오차를 도출하고 도출된 오차로부터 성능 지수를 계산한다. Fig. 6에서 보이듯이 도출된 성능 지수로부터 구동기 고장 단계를 판단할 수 있다. 다음 절에서는 본 논문에서 제안하는 적응형 구동기 고장 탐지 및 허용 제어 알고리즘에 대해 성능평가 결과를 기술하고 분석한다.
3. 성능평가 결과
본 논문에서 제안하는 적응형 고장 탐지 및 허용 제어 알고리즘을 평가하기 위해 Matlab/Simulink 환경에서 적응형 되먹임 제어(AFC)를 이용한 고장 허용 제어 알고리즘과 성능 지수 기반 고장 탐지 알고리즘이 설계되었다. 설계된 알고리즘은 차량 시뮬레이션 소프트웨어로 차량, 제어 알고리즘, 주행 환경 및 요소들을 개발 및 구성하여 다양한 평가가 가능한 상용 소프트웨어인 CarMaker에서 제공되는 차량을 기반으로 성능평가를 수행하였다. 성능평가 시나리오를 구동기 고장이 유무에 따라 구분하였으며 각각 선형 2차 조절 기(LQR)와 제안된 알고리즘을 비교 및 분석하였다. 고장 주입은 하위 제어기에서 도출되는 제어 입력을 정상 상태 대비 비례하여 작은 입력 값을 갖도록 하였다. Table 1은 적용된 시나리오 및 주행 조건들이다.
Table 1.
Driving scenarios and conditions for performance evaluation
Table 1에서 모든 Case는 직진 차선을 주행하기 위해 CarMaker에서 제공되는 운전자 모델을 적용하였다. Table 2는 성능평가를 위해 사용된 파라미터이다.
Table 2.
Parameters used for performance evaluation
Table 1과 2에서 기술된 Case1과 Case2에 대한 고장이 있는 경우와 없는 경우를 구분하여 적용하였으며, Fig. 7~26은 고장 탐지 및 적응형 고장 허용 제어 알고리즘의 성능평가 결과이다. 고장 주입은 40~65초에 적용하였다.
Fig. 7~9는 구동기 고장이 없는 경우로 목표 속도 및 상대 거리 추종 결과들을 확인할 수 있다. 구동기 고장이 주입된 경우 Fig. 17~19에서 볼 수 있듯이 AFC는 40~65초에서 고장에도 불구하고 목표 속도 및 상대 거리를 합리적으로 추종하는 결과를 확인하였다. 반면 LQR은 고장을 주입한 구간에서 목표 속도를 추종하지 못하여 현재 차량의 상대 거리가 목표 상대 거리와 최대 약 20m 정도 차이가 발생한 결과를 보였다. Fig. 10, 11, 20, 21에서 순환 최소 자승으로부터 도출된 추정치와 적응형 이득을 기반으로 목표 속도를 추종하기 위한 되먹임 이득이 갱신됨을 Fig. 12와 22에서 확인할 수 있다. 고장 주입 시점으로부터 목표 속도를 추종하기 위한 요구 가속도 도출을 위해 되먹임 이득이 갱신되어 비교적 큰 목표 가속도 결과를 Fig. 13과 23에서 확인하였다. Fig. 14, 15, 24, 25는 가속도 오차 및 표준 편차의 계산 결과이며, 가속도 오차와 달리 1계 전달함수 기반 지연된 가속도 오차를 이용하여 실시간 계산되는 표준 편차는 부드러운 곡선이 도출되었다. 정의된 성능 지수 및 Fault level 구분을 위한 임계값에 의해 고장이 탐지된 결과를 Fig. 26에서 확인할 수 있다. 또한, 고장 탐지 시점(42.56초)은 실제 적용된 고장 시점(40초)과 2.56초의 차이를 보였다. Fig. 27~46은 Sine wave의 목표 속도를 추종하는 Case3과 Case4의 성능평가 결과들이다.
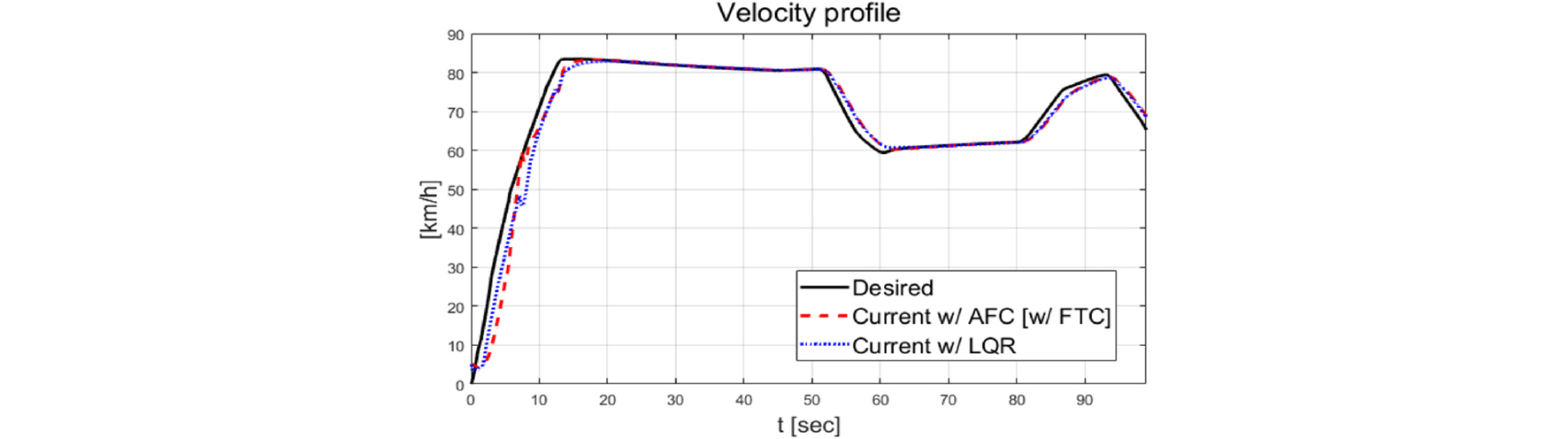
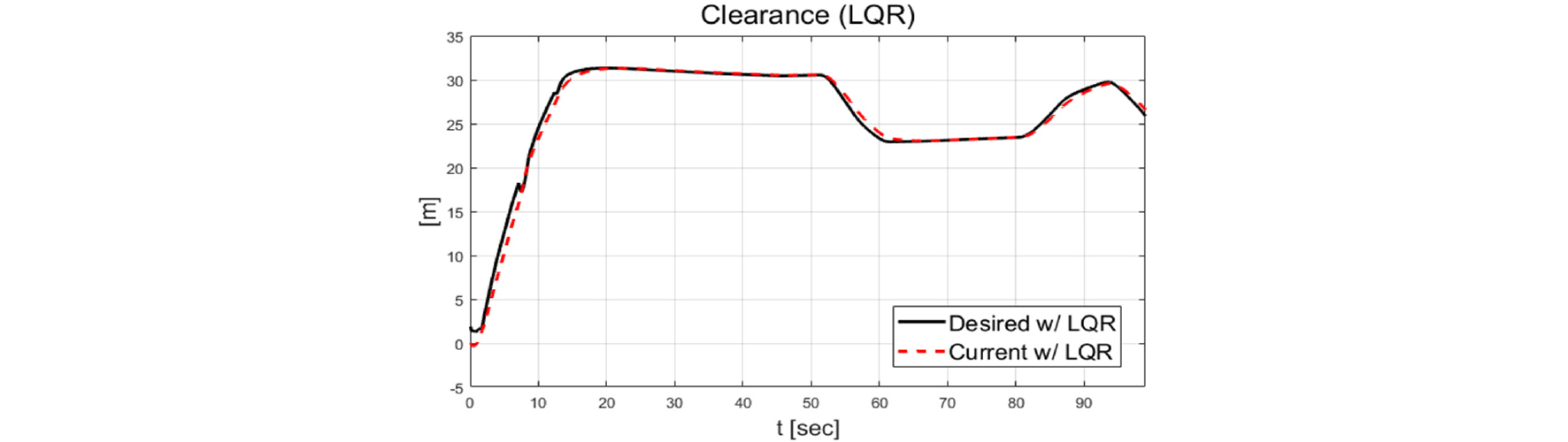
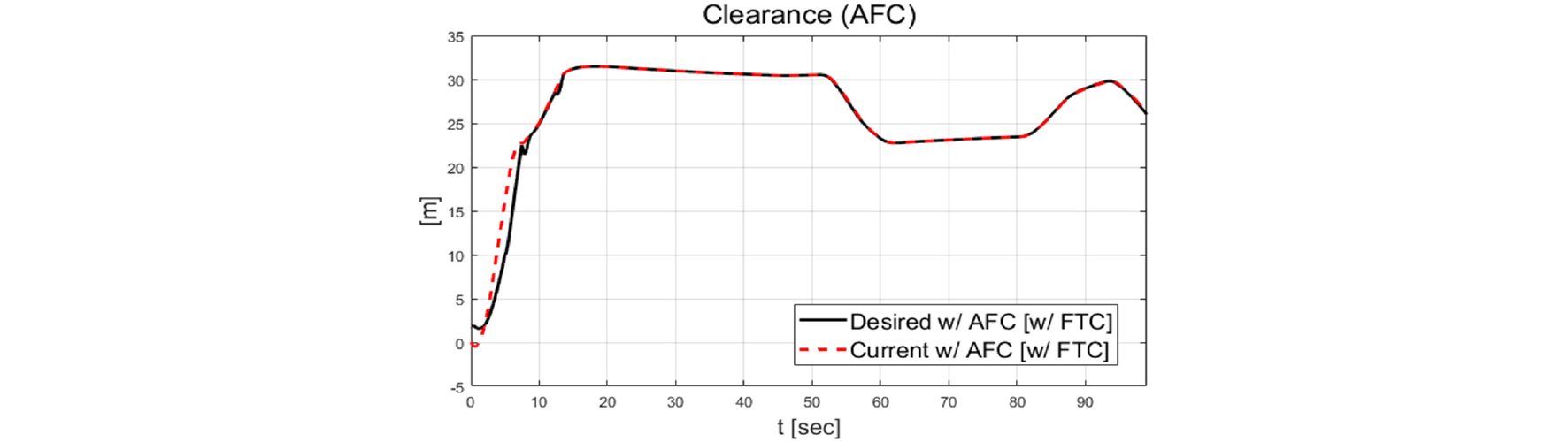
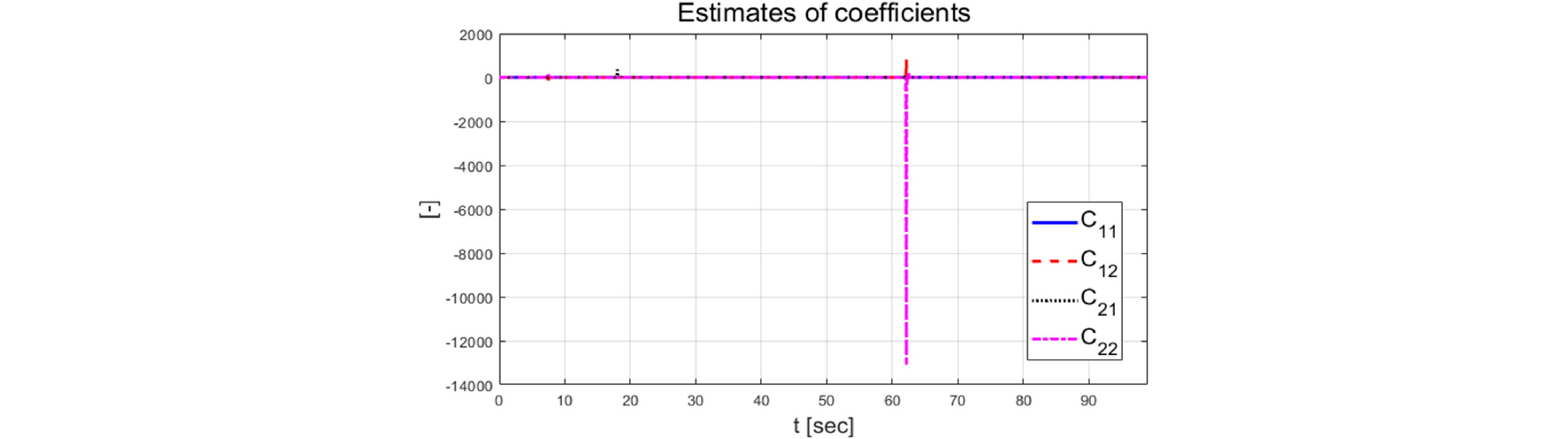
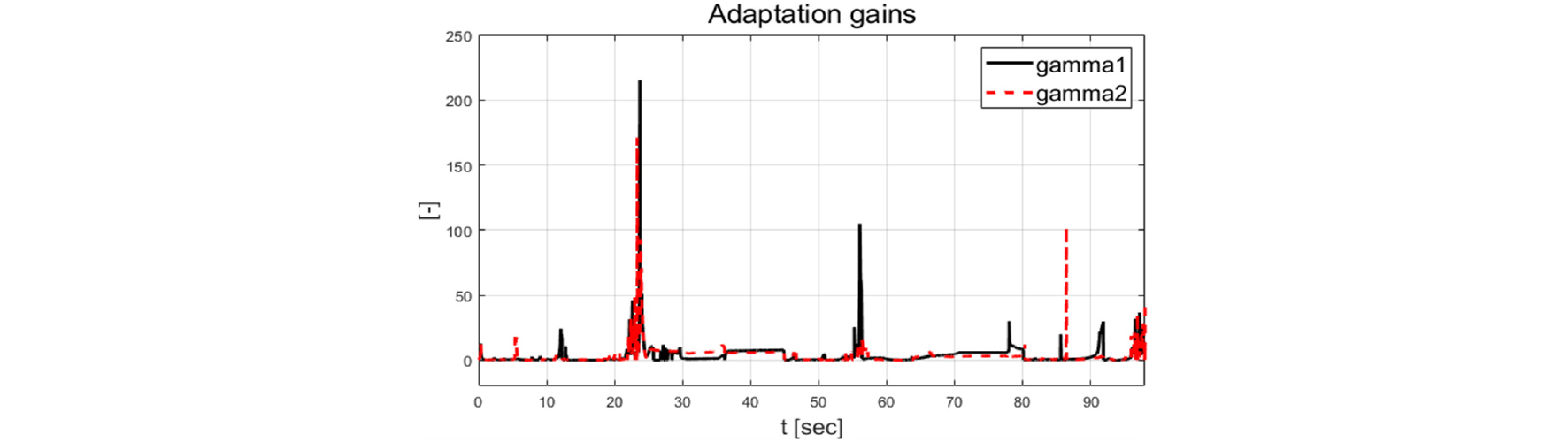
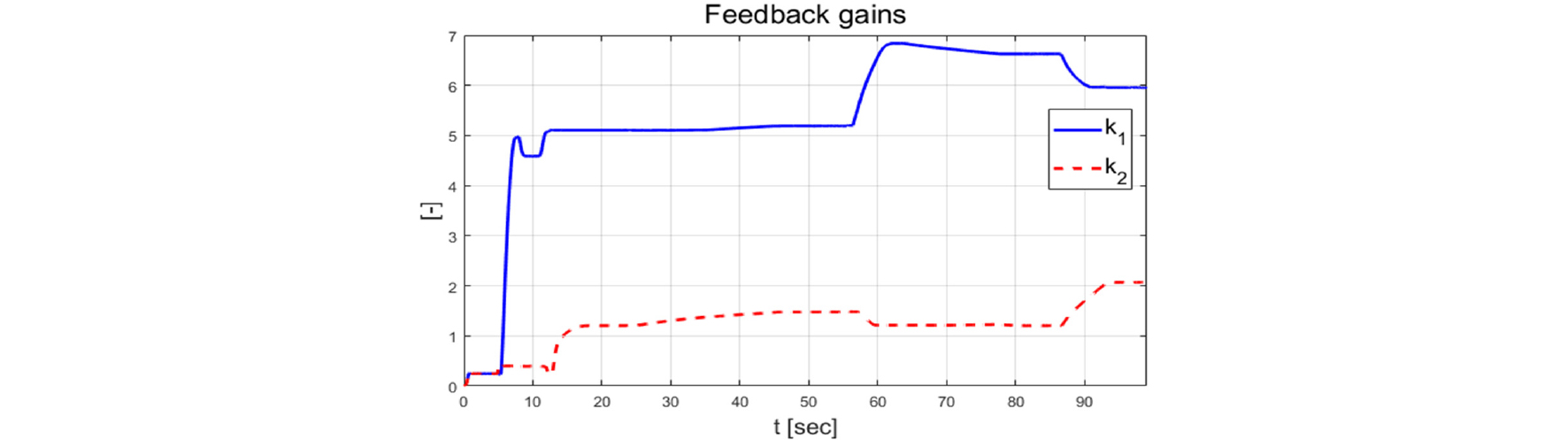
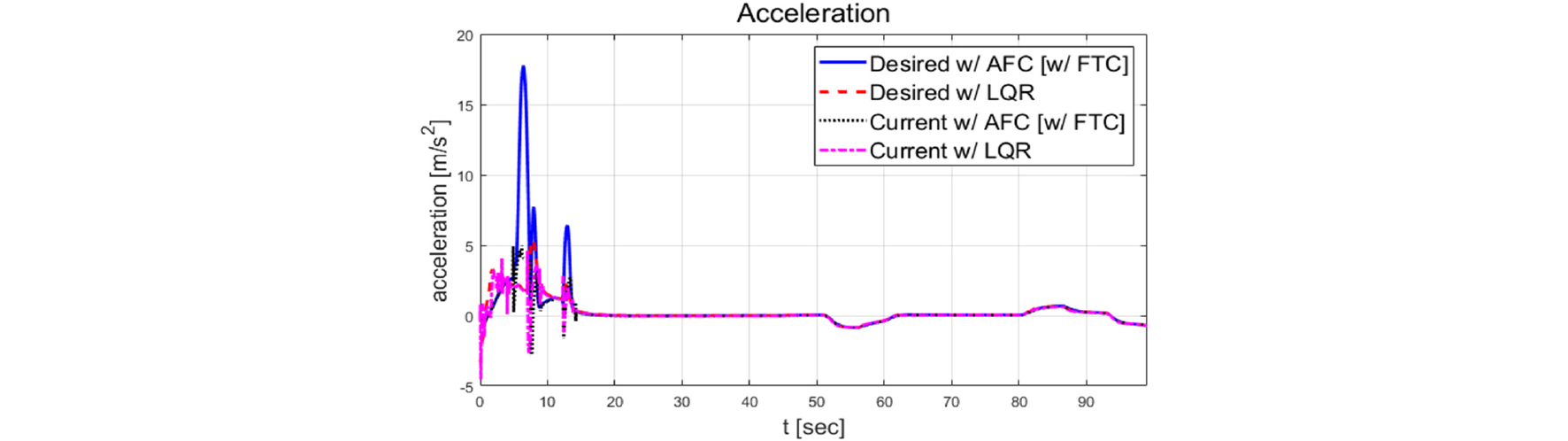
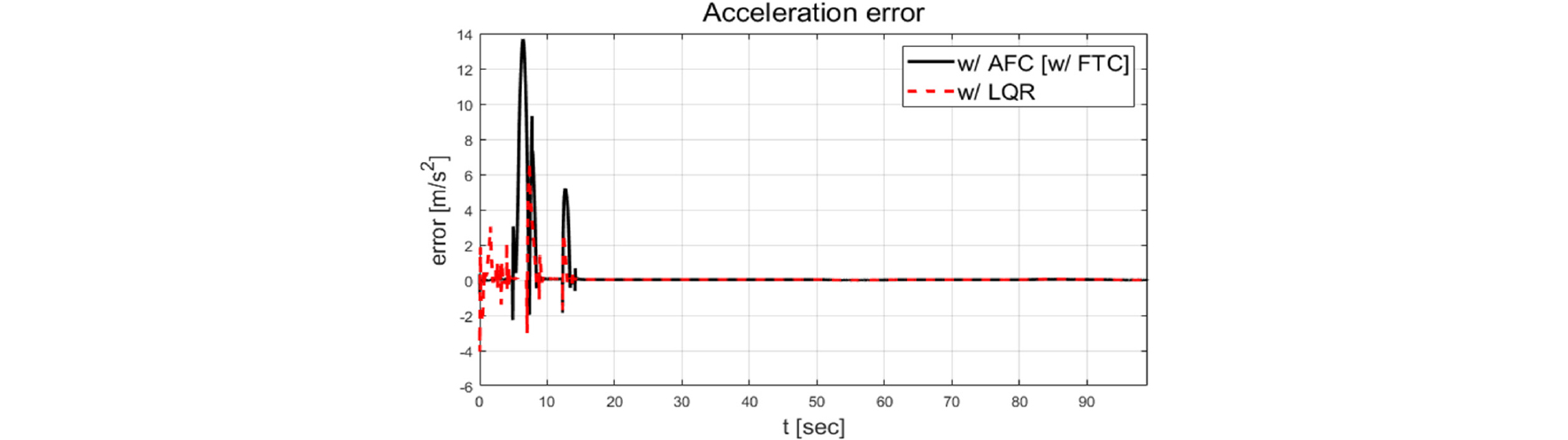
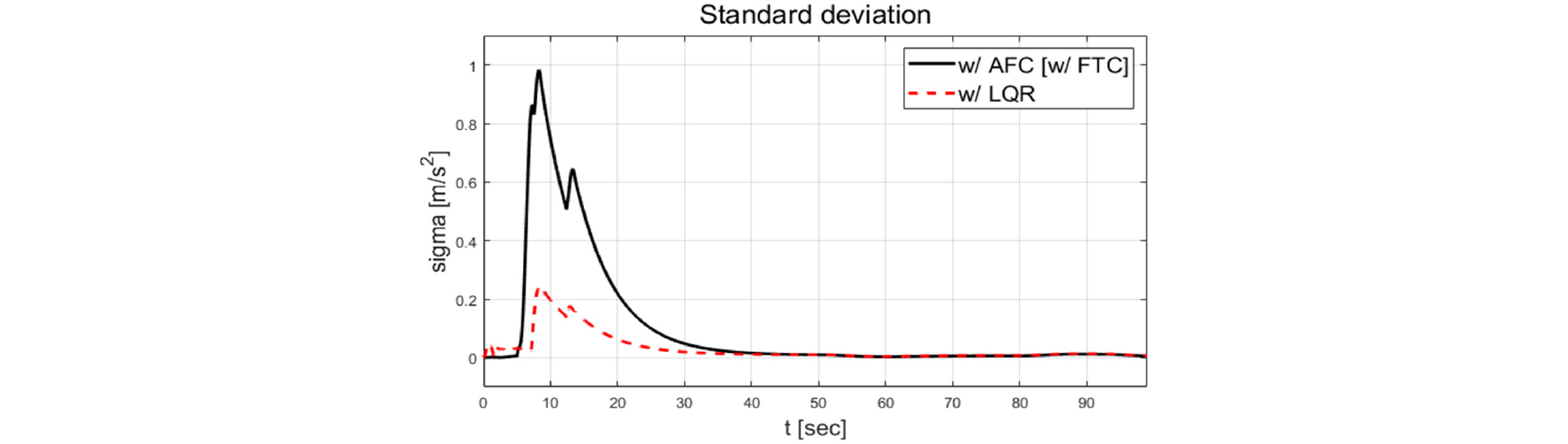
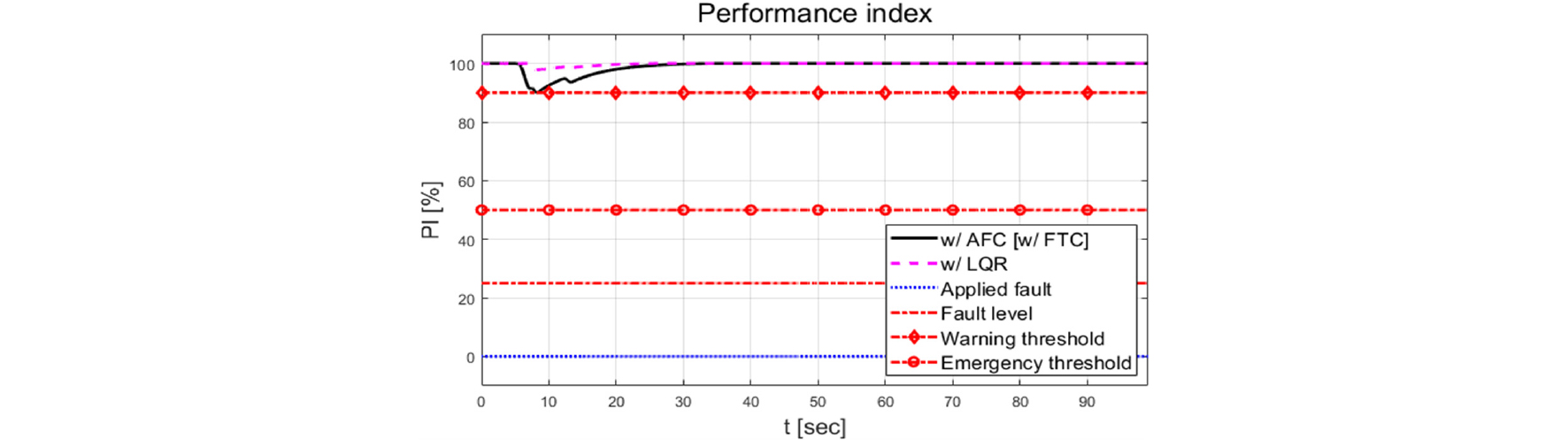
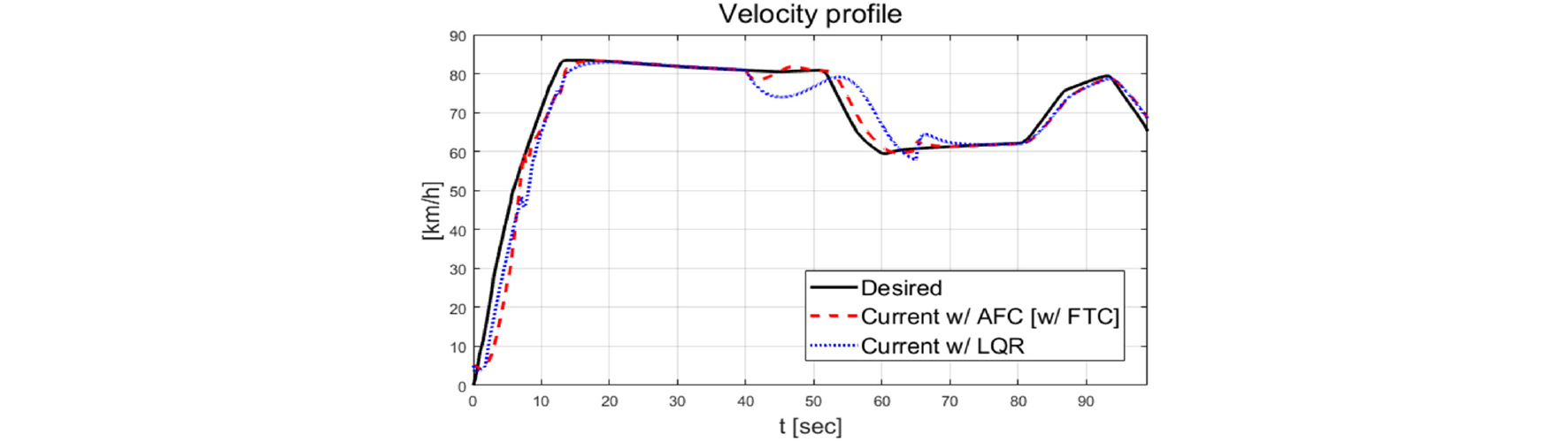
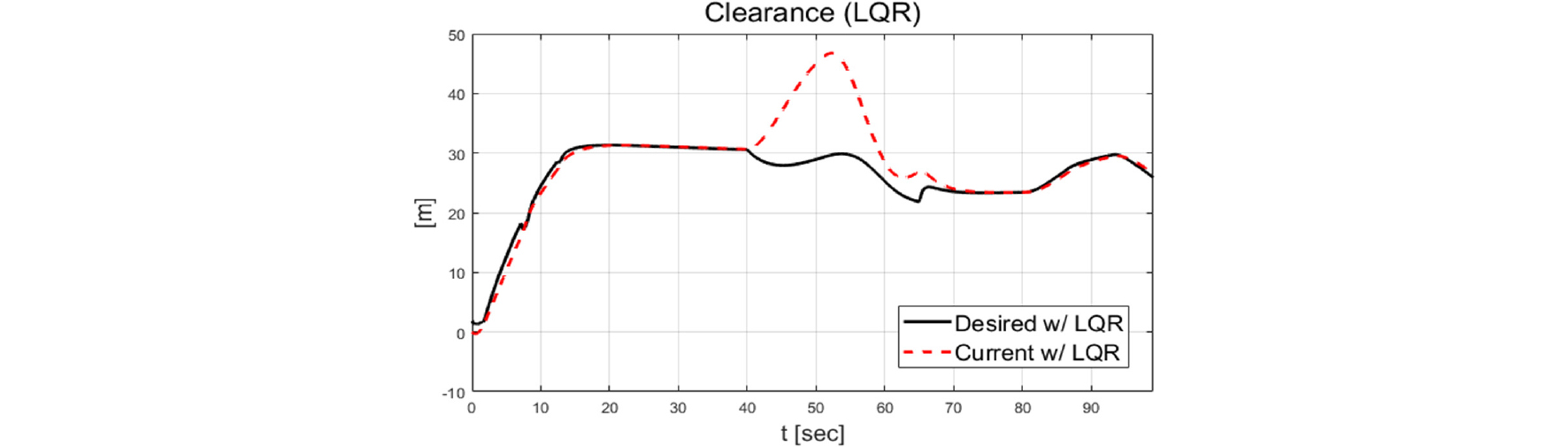
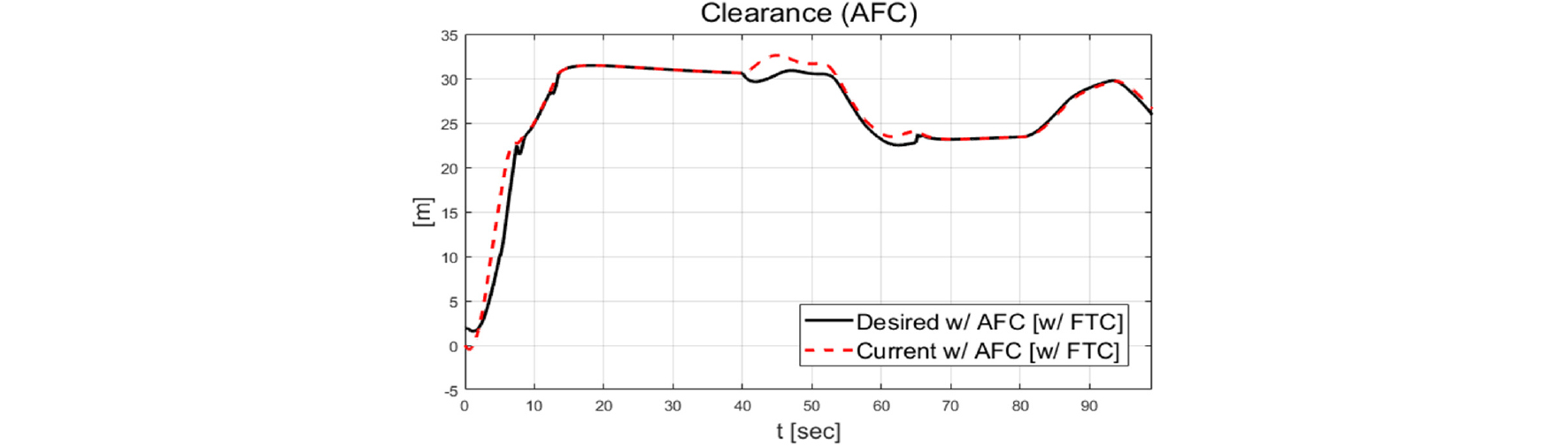
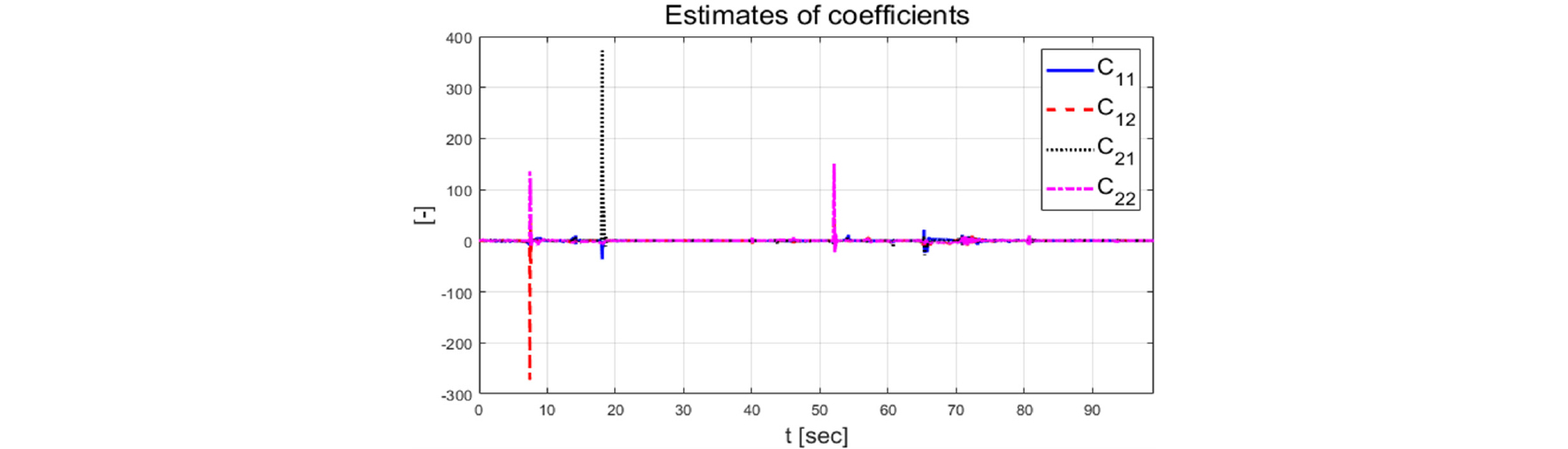
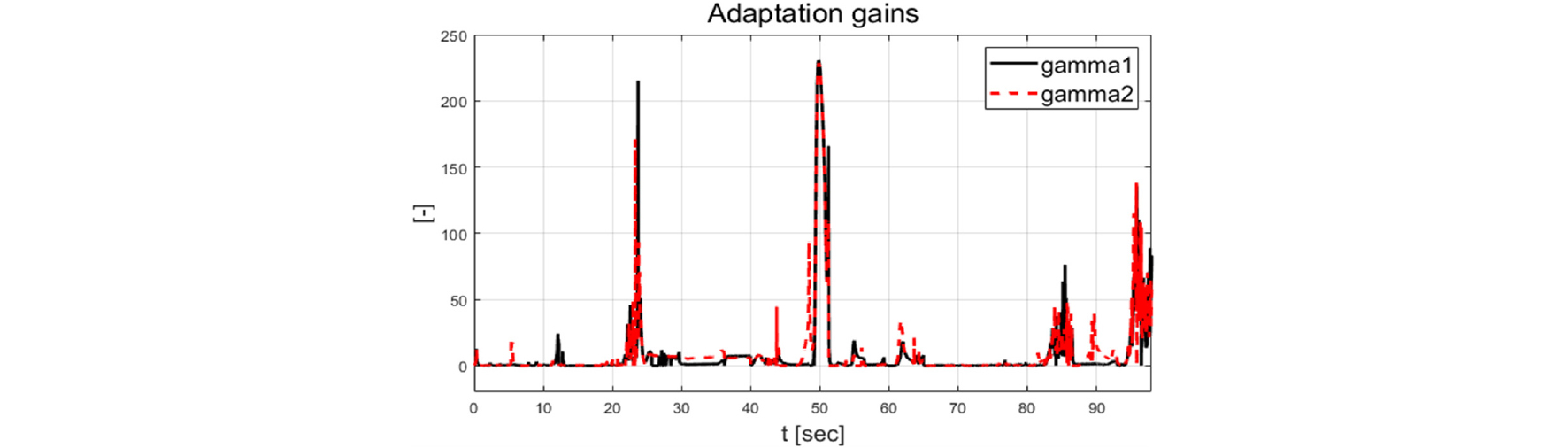
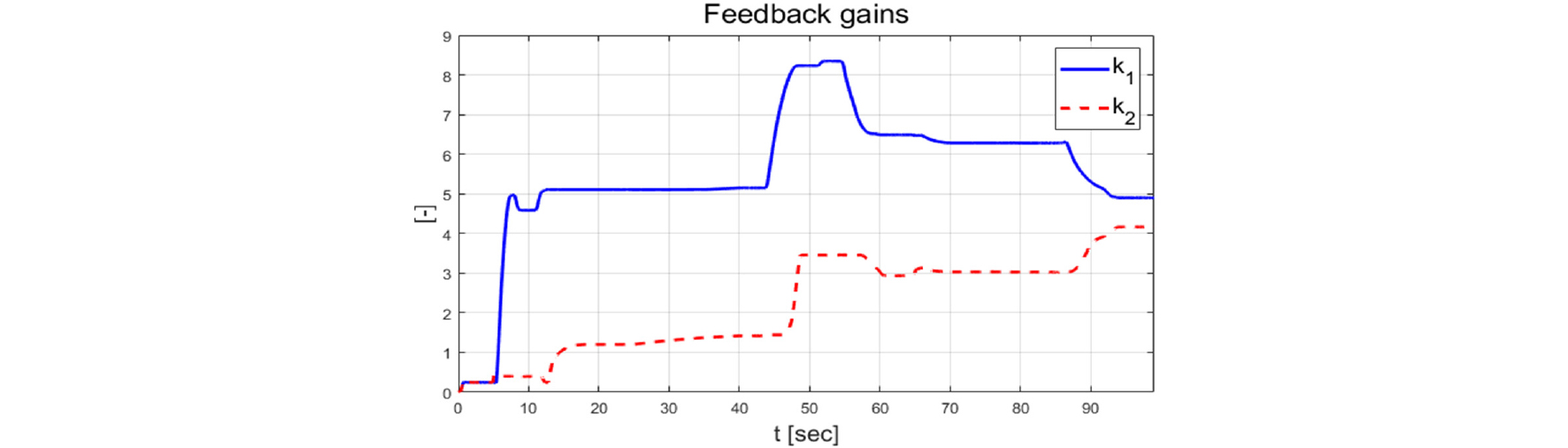
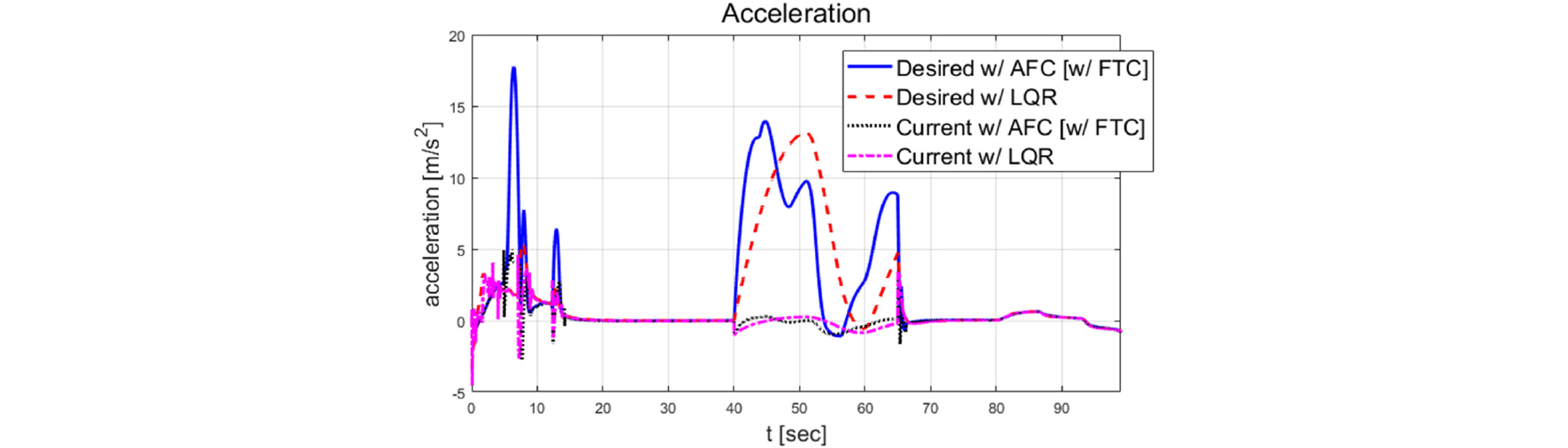
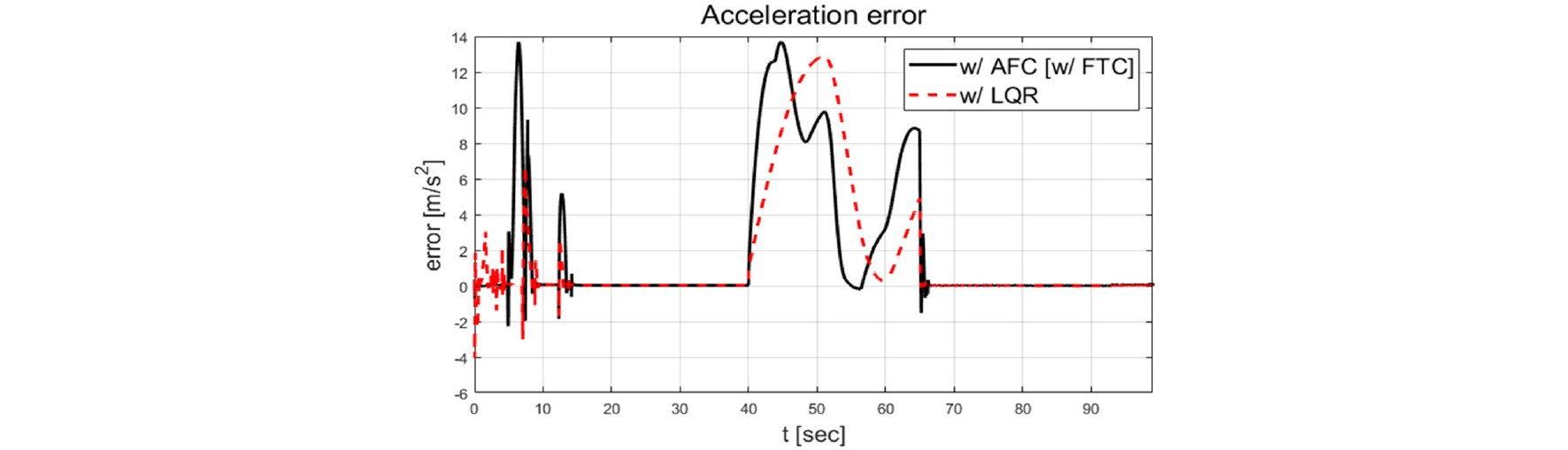
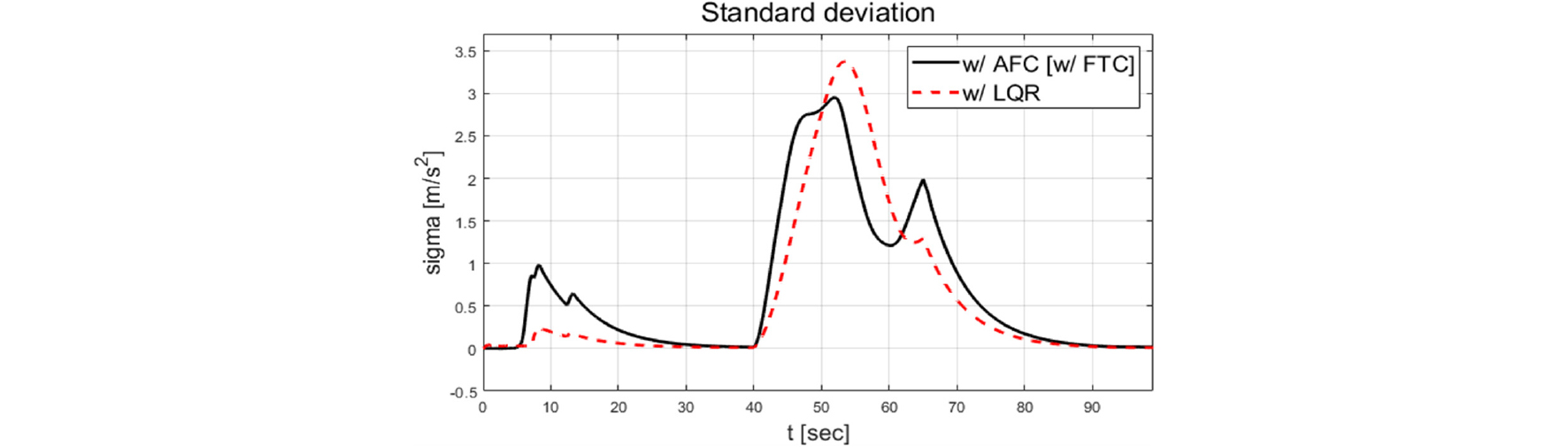
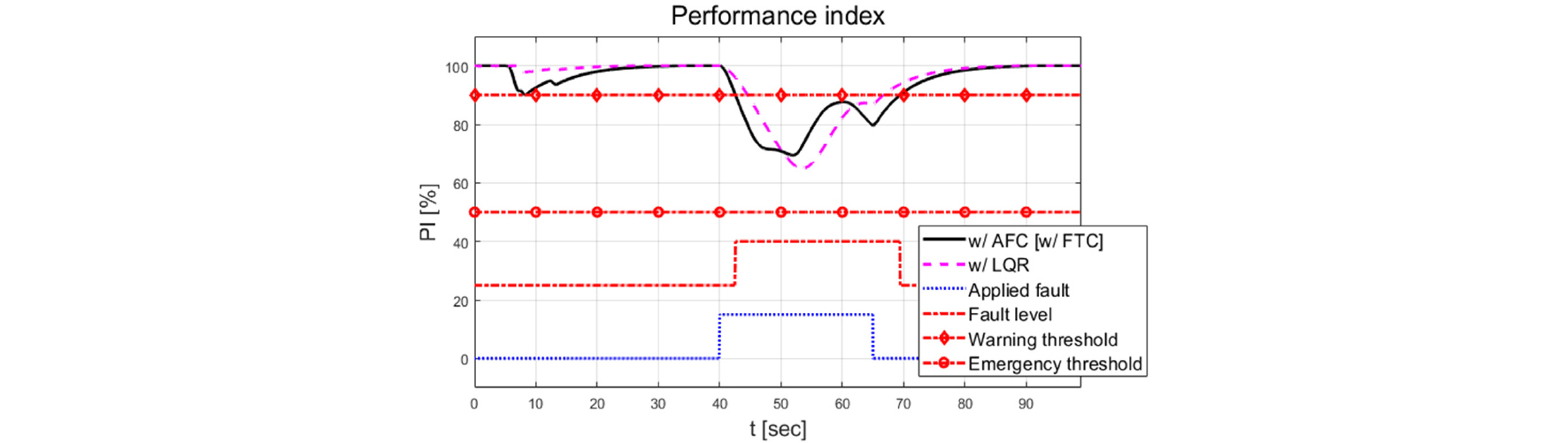
Fig. 27~29에서 구동기가 정상 상태일 경우 비교된 제어기들로 목표 속도 및 목표 상대 거리의 추종 결과를 확인할 수 있다. Fig. 37~39은 고장을 주입한 경우로 구동기 고장에도 불구하고 AFC는 LQR과 비교적 합리적인 추종 결과를 보였다. 순환 최소 자승 기반 추정 계수와 적응형 이득은 Fig. 30, 31, 40, 41에서 보이듯이 Case1,2와 같이 추청 값들을 기반으로 목표 속도를 추종하기 위한 되먹임 이득 갱신 결과를 Fig. 32와 42에서 확인할 수 있다. Fig. 33과 43에서 실시간 갱신되는 되먹임 이득 기반 요구 가속도 계산 결과를 확인할 수 있으며 정상 상태 구간에서 비교적 크게 발생되는 요구 가속도들은 차량의 제어 오차를 줄이기 위해 되먹임 이득의 변화에 의해 발생되는 값들이다. 34, 35, 44, 45에서 현재 가속도와 요구 가속도 간의 가속도 오차 및 Window 기반 실시간으로 계산된 표준 편차를 확인할 수 있다. Fig. 36과 Fig. 46에서 성능 지수가 Fault level 임계값에 따라 이를 기반으로 고장이 탐지되는 결과를 보였다. 제안된 고장 탐지 알고리즘은 AFC와 LQR의 경우 적용된 고장 시점(35초)을 기준으로 각각 2.15초, 3.82초 이후 구동기 고장을 탐지하였다. 결과적으로 본 연구에서 제안된 고장 탐지 및 적응형 고장 허용 제어 알고리즘은 고정된 파라미터를 갖는 LQR 대비 파라미터를 갱신하여 합리적 결과들을 확인하였다. 표준편차 개념을 이용하여 AFC와 LQR의 추종 및 탐지 성능을 분석하기 위해 목표 속도와 현재 속도 간의 오차 기반 표준 편차와 고장 탐지 시간을 Table 3, 4에 구분하였다.
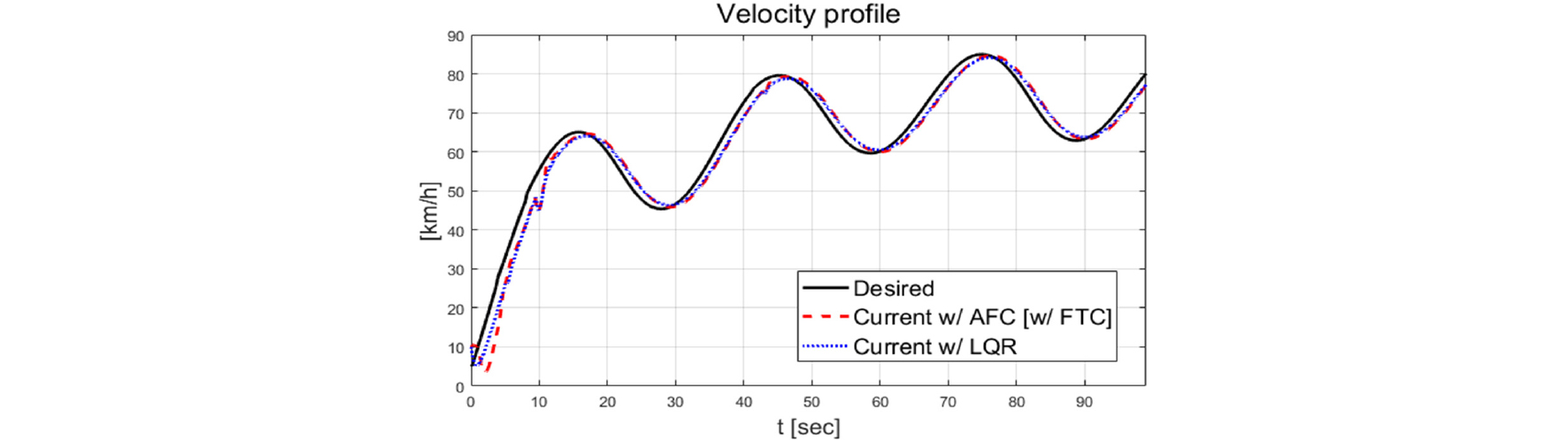
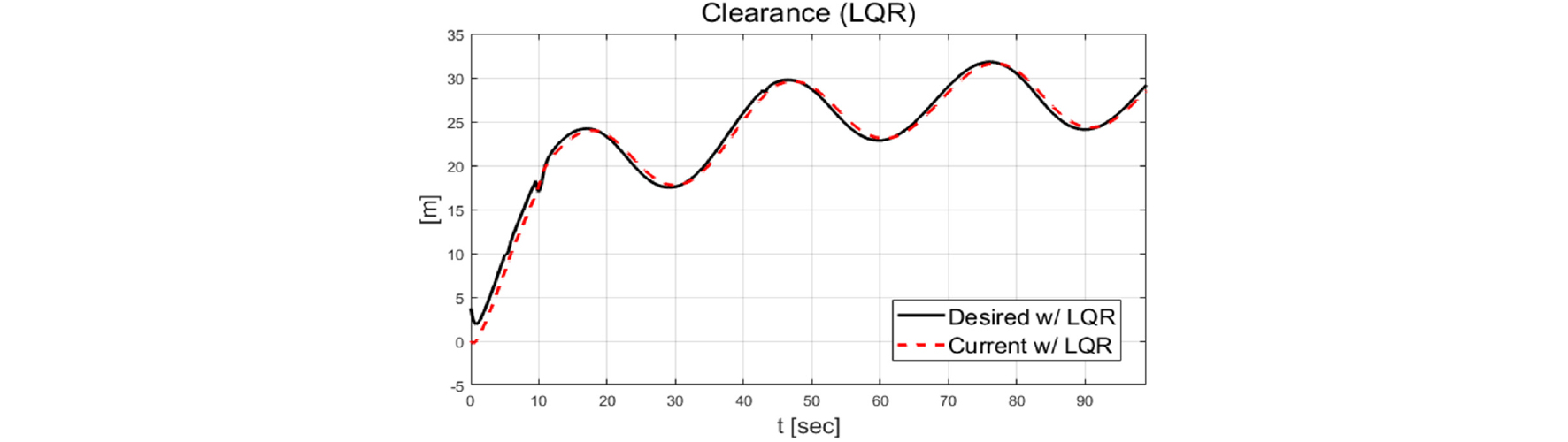
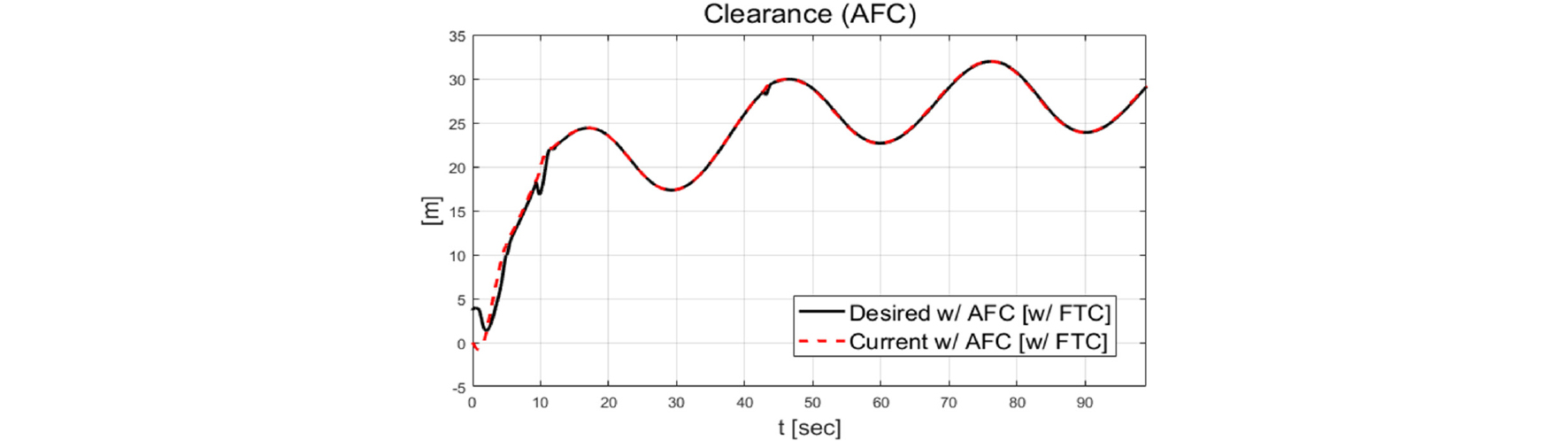
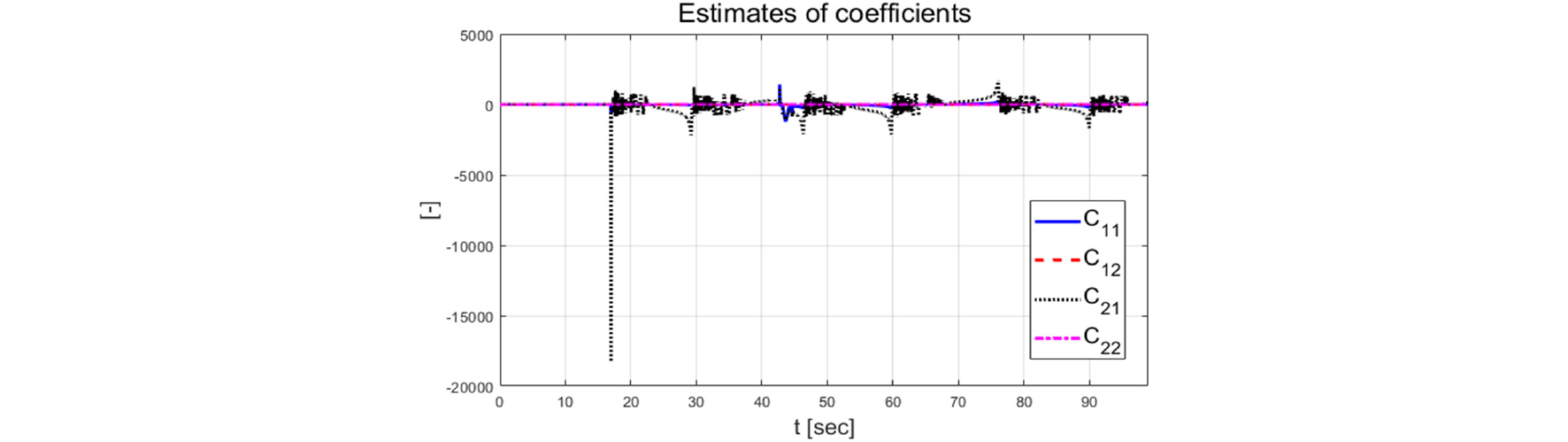
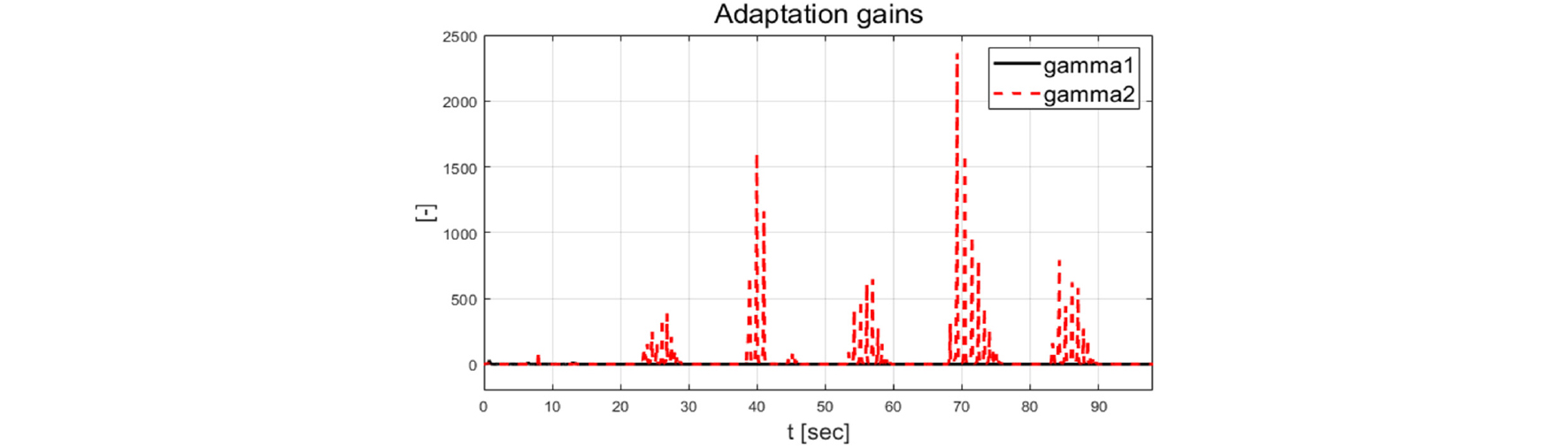
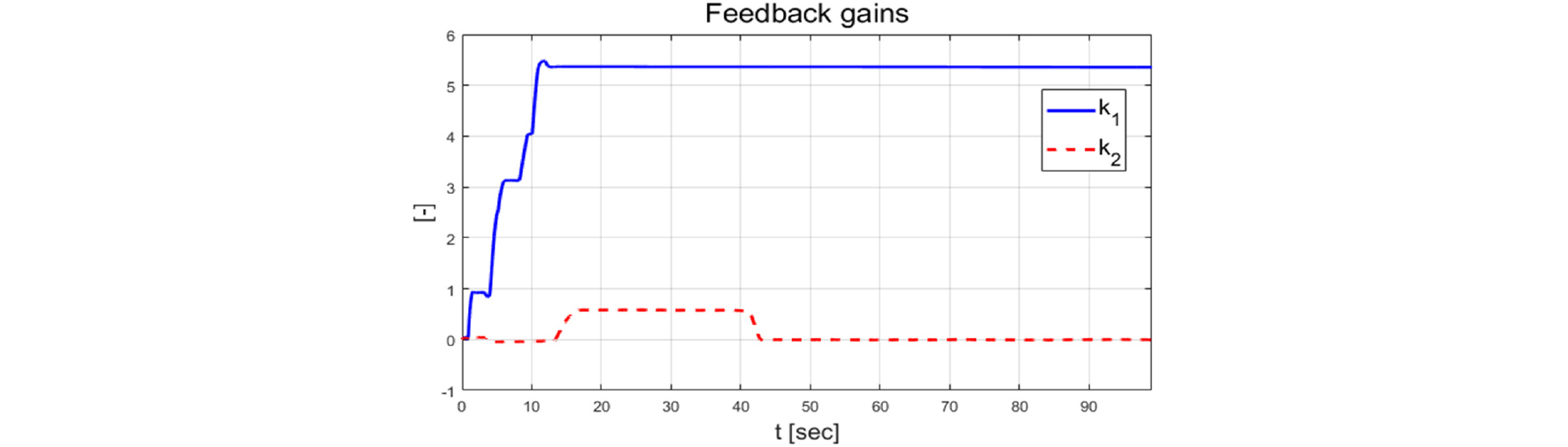
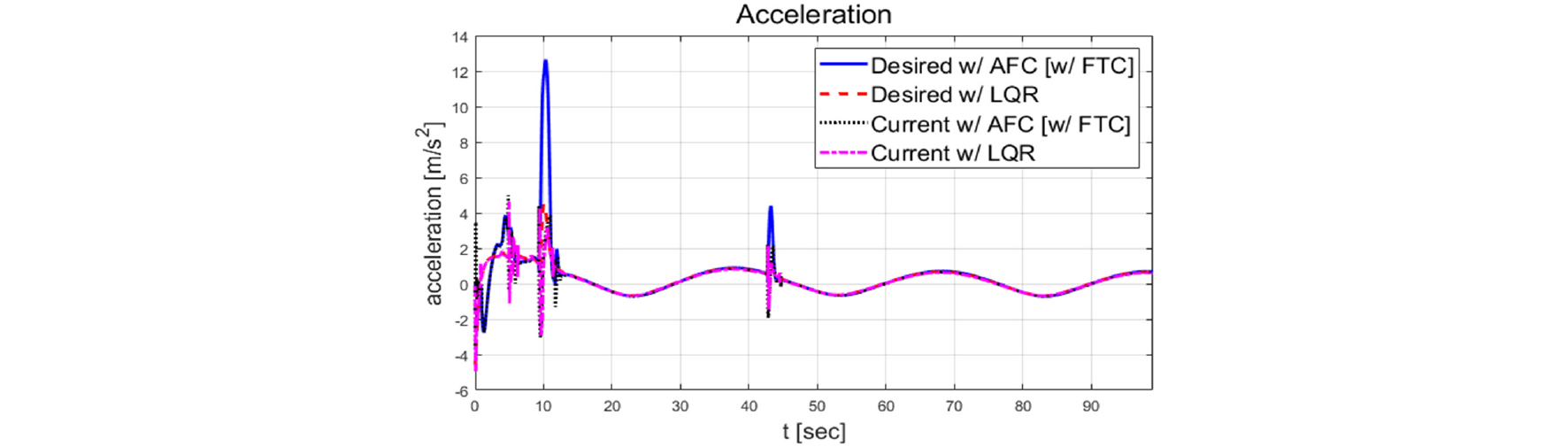
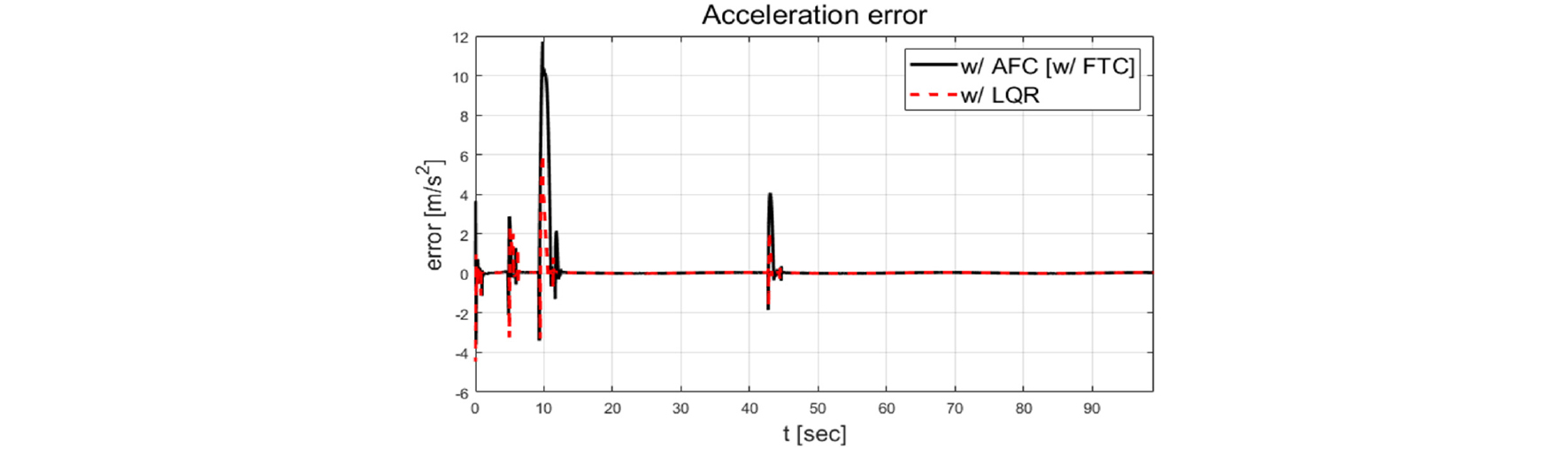
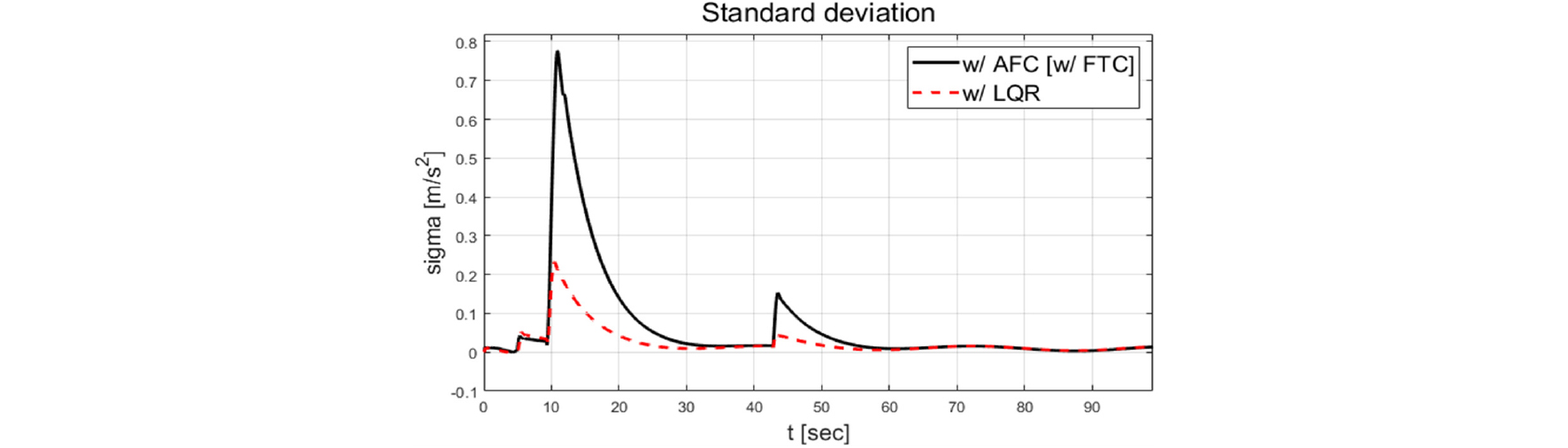
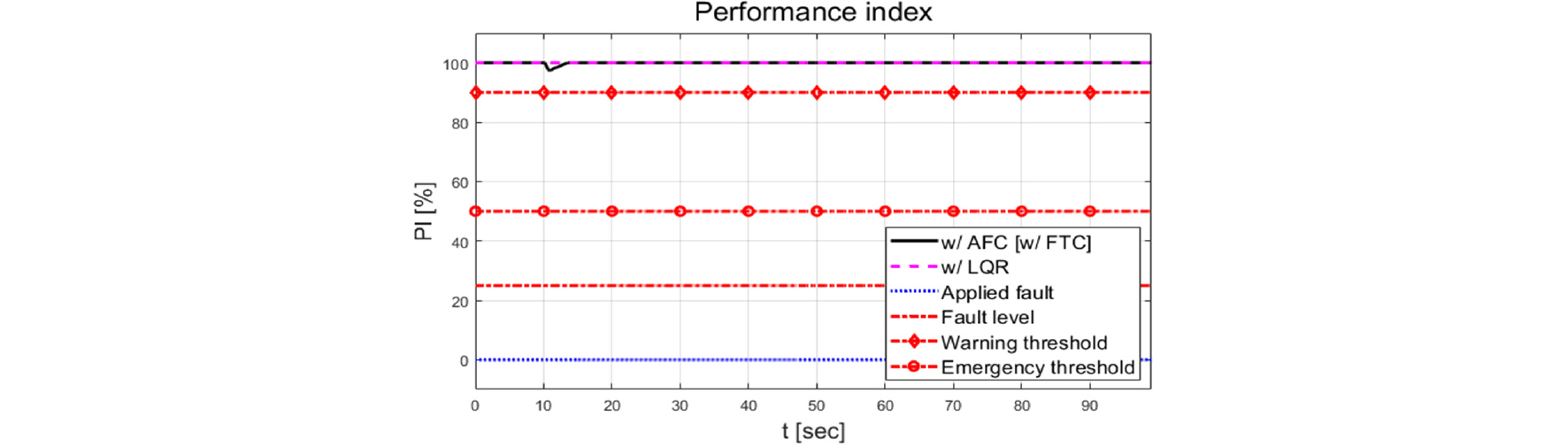
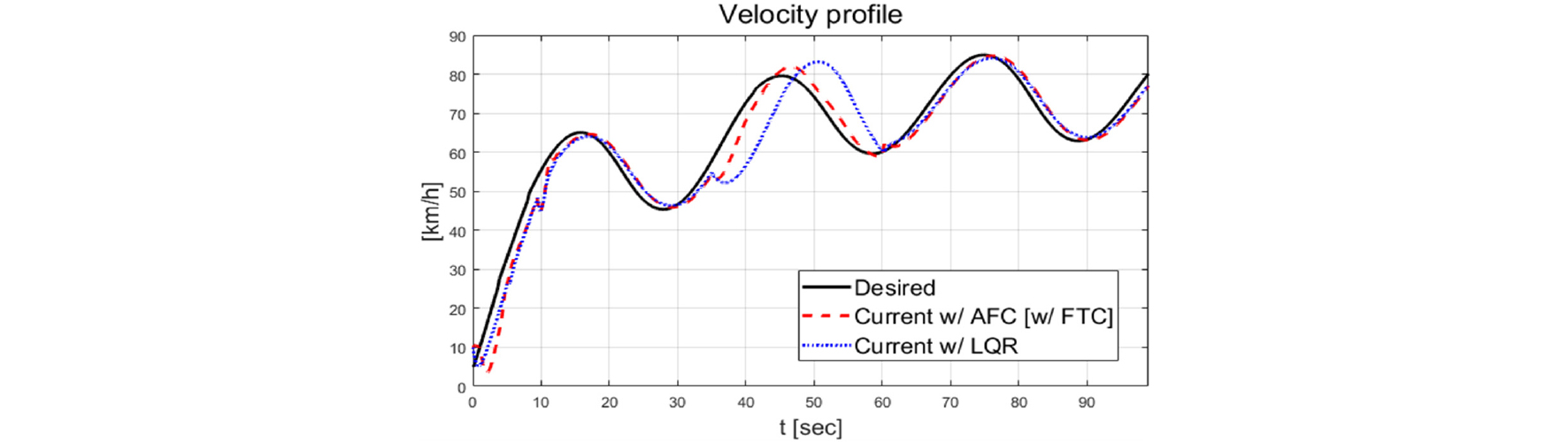
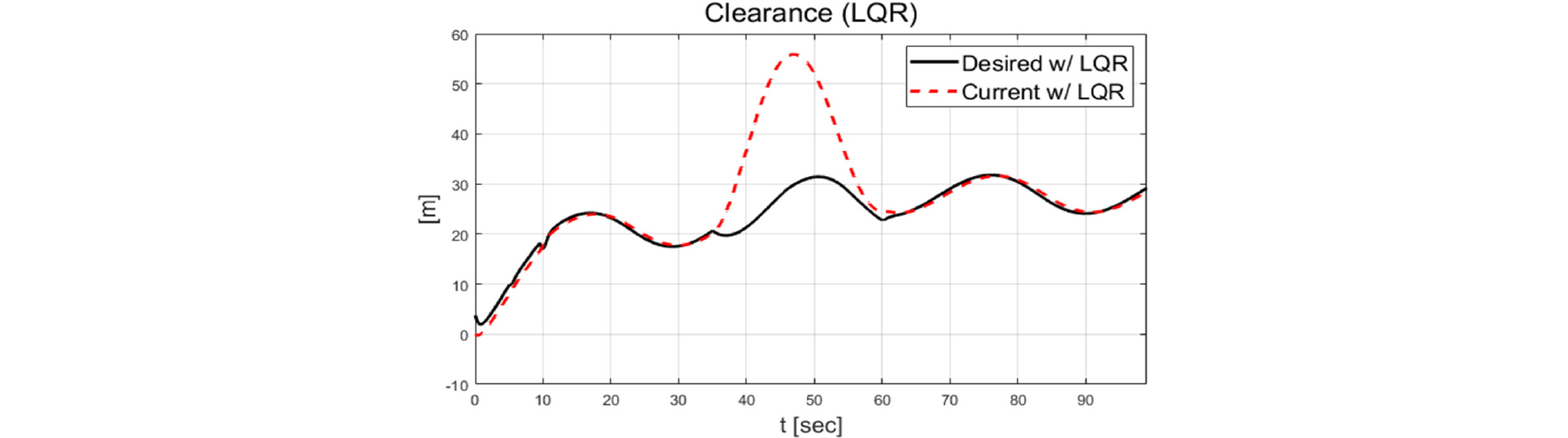
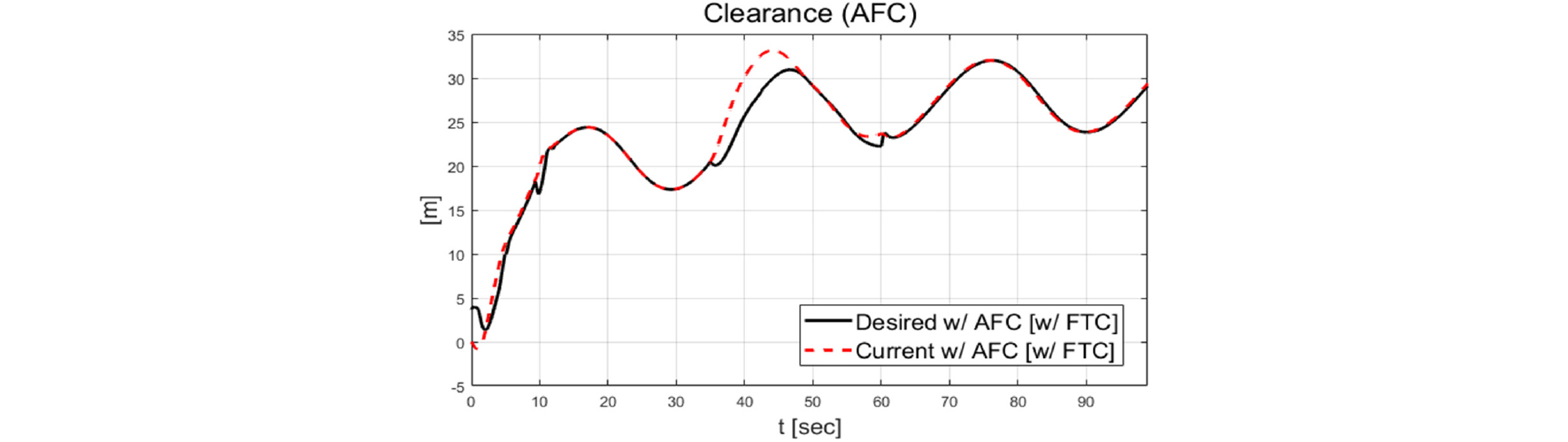
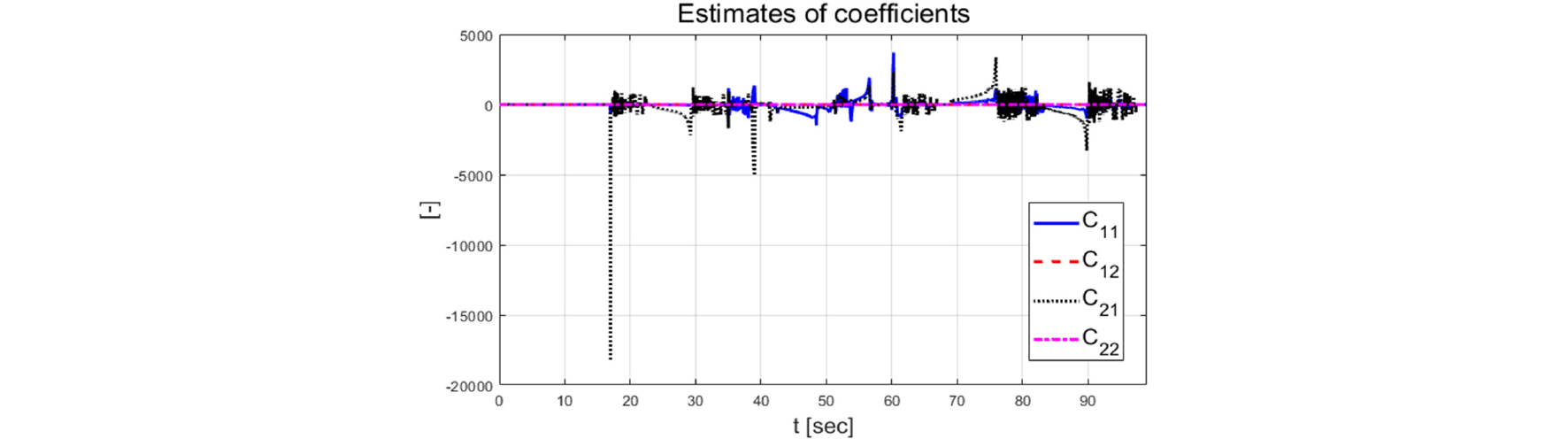
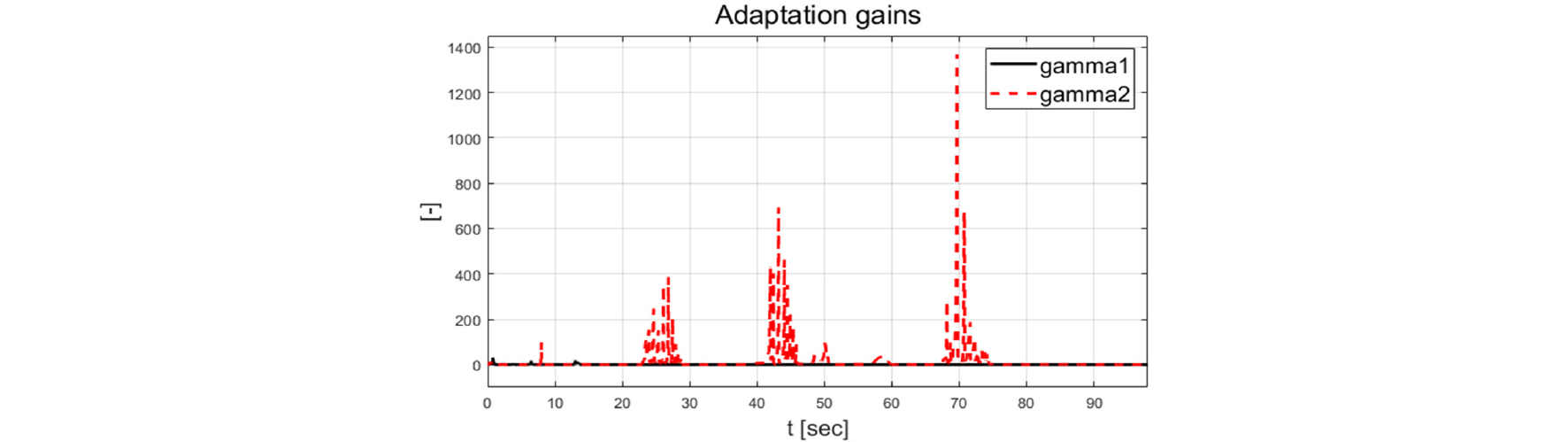
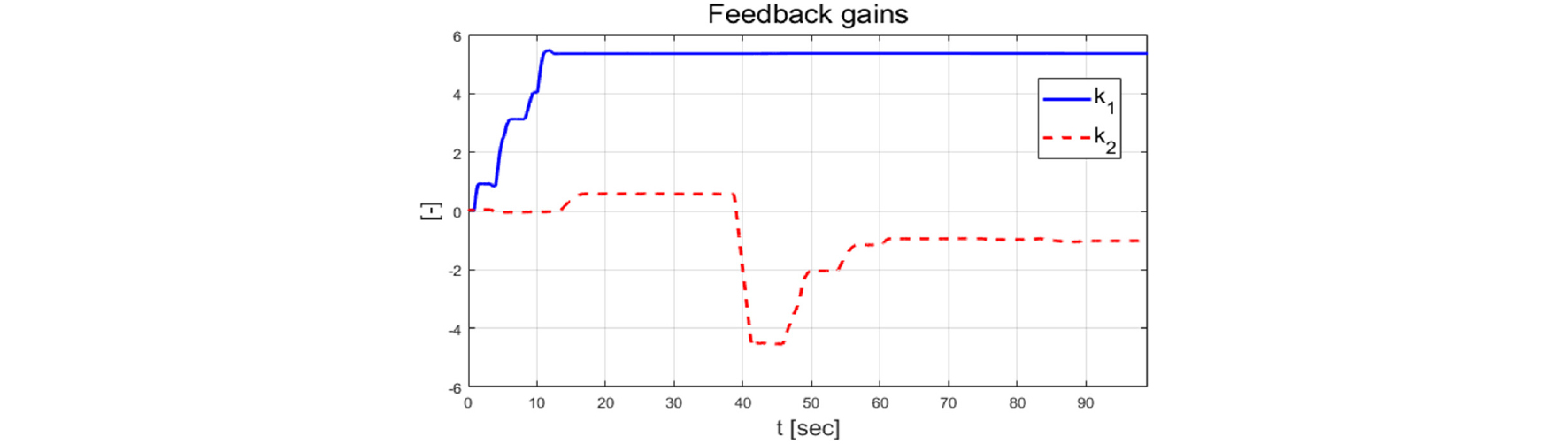
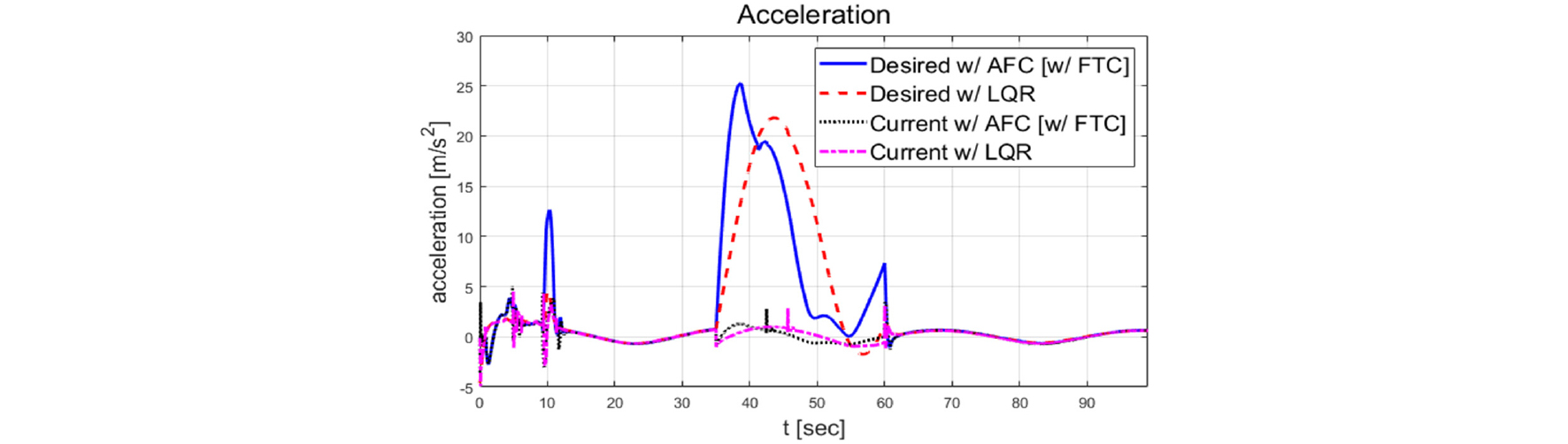
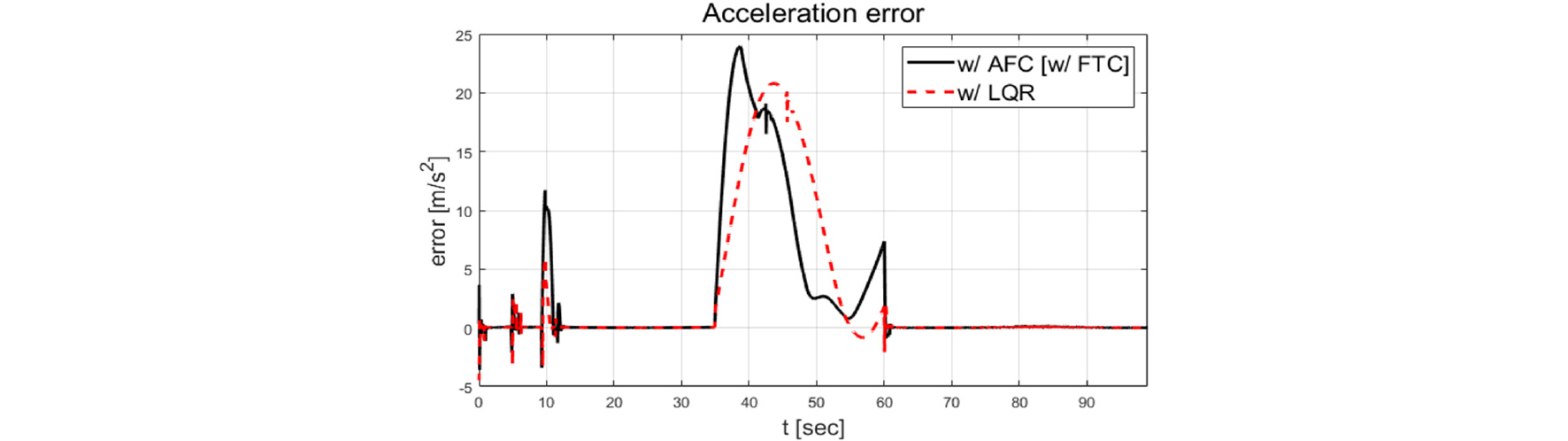
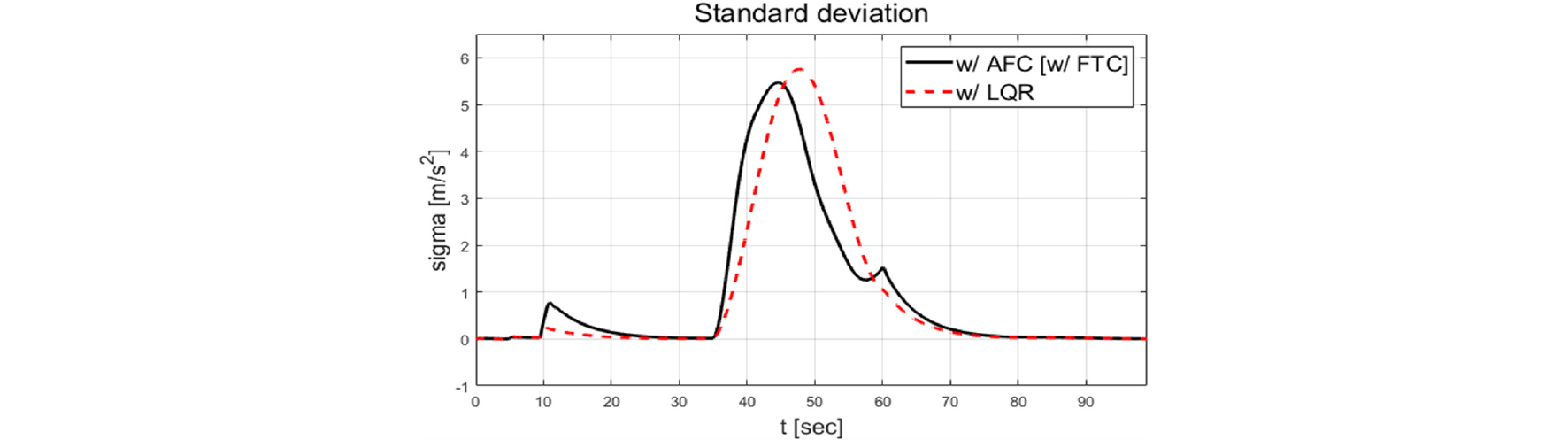
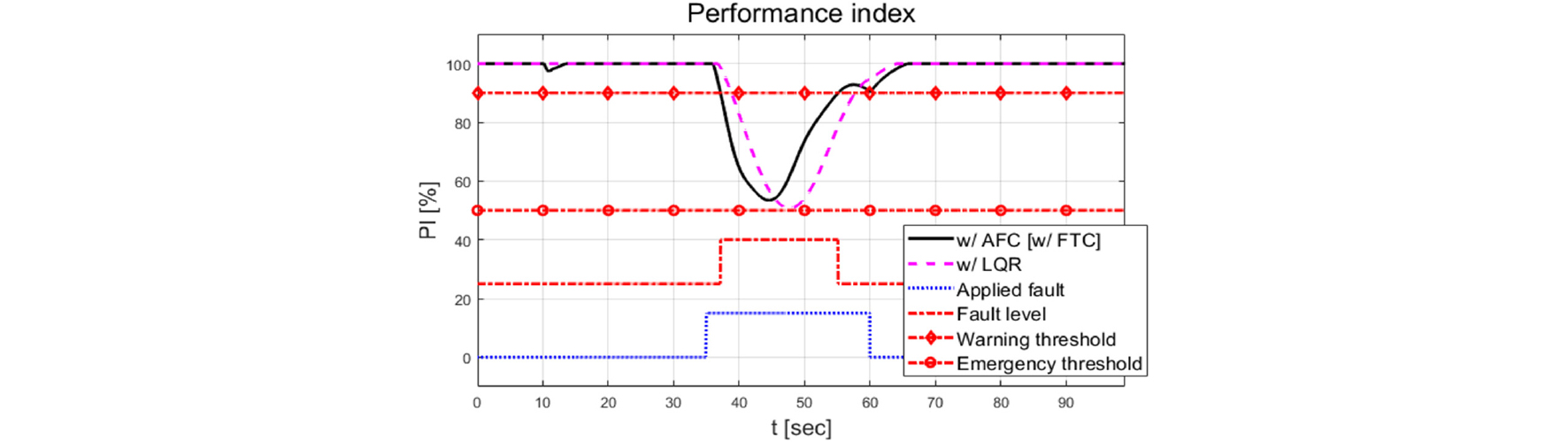
Table 3.
Sigma value of velocity tracking error
Table 4.
Fault detection time
| Division | Fault injection time | Fault Detection time | |
| AFC | LQR | ||
| Case2 | 40[sec] | 42.56 [sec] | 44.52 [sec] |
| Case4 | 35[sec] | 37.15 [sec] | 38.82 [sec] |
Table 3, 4에서 보이듯이 AFC는 LQR 대비 정확한 모델이 없이도 고장 허용 제어를 위해 목표 속도를 추종하기 위한 종방향 요구 가속도를 갱신하며, 이를 기반으로 성능 지수를 도출하고 고장을 탐지하는 결과를 도출하였다. 또한, 제안된 알고리즘은 고려해야 할 파라미터들을 감소시켜 최소한의 파라미터를 갖도록 설계되었다. 그러나 현재 알고리즘에 이용되는 순환 최소 자승법은 지수적인 안정성을 갖기 때문에 입력 데이터들에 따라 불안정한 추정치들을 도출하는 한계점이 있다. 다음 장에서는 결론과 한계점 분석 및 향후 제안된 알고리즘의 고도화 계획에 대해 기술한다.
4. 결 론
본 논문에서는 종방향 자율주행을 위한 다중 순환 최소 자승 기법 및 성능 지수 기반 적응형 고장 허용 제어 및 고장 탐지 알고리즘을 개발하였다. 알고리즘은 되먹임 기법을 이용한 종방향 요구 가속도를 도출하도록 설계되었다. 요구 가속도는 순환 최소 자승으로부터 실시간 도출되는 추정 계수들과 경사 하강법 기반 적응형 이득을 기반으로 갱신되었다. 적응형 목표 가속도와 현재 가속도 간의 오차가 고장 탐지를 위한 성능 지수에 이용되었다. 성능 지수 도출을 위해 Window 기반 가중 표준 편차를 사용하였다. Window 내 데이터 가중을 위해 5차 함수를 이용한 가중치 함수를 설계하였고, 이를 기반으로 계산된 표준 편차는 성능 지수 계산을 위해 사용되었다. 정의된 성능 지수 기반 고장 단계를 정상, 경고, 비상 세 가지 단계로 구분하는 판단 알고리즘을 설계하였다. 성능평가로부터 제안된 제어기와 LQR 제어기를 비교하였고, 고정된 파라미터를 갖는 LQR의 경우 구동기 고장 탐지는 가능하였으나 고장 허용 제어는 어려운 한계점을 확인하였다. 반면 제안된 알고리즘은 고장 허용 제어를 위한 적응형 목표 가속도를 도출함으로써 목표하는 상대 거리 및 상대 속도를 합리적으로 추종하는 결과를 확인하였다. 또한, 제안된 성능 지수를 기반으로 구동기 고장을 탐지할 수 있음을 확인하였다. 제안된 제어 알고리즘의 경우 제어 파라미터 최소화를 위한 방법론을 제시함으로써 파라미터의 차원은 축소되었다. 그러나 부가적으로 발생된 파라미터 갱신이 필요하였다. 그러므로 나머지 파라미터들의 실시간 자동 갱신을 위해 머신러닝 기반 학습 알고리즘의 적용을 계획하고 있으며, 순환 최소 자승 알고리즘의 안정성 고도화를 계획하고 있다. 그리고 현 단계에는 고장을 제어 입력에 대한 비례 계수 적용으로 주입하였으나 향후 합리적 성능평가를 위한 고장 형태 영향 분석(FMEA) 방법 기반 구동기 고장 적용을 계획하고 있다. 향후 제안된 알고리즘은 자율주행 자동차의 구동기 고장 안전 시스템에 이용될 것으로 기대한다.
