
-
-
Economic Analysis of the Ex-Ante Certification System for EV Production Safety
전기자동차 제작안전 사전인증제 경제성 분석
-
Ji-Young Kim, Seung-Jun Hong
김지영, 홍승준
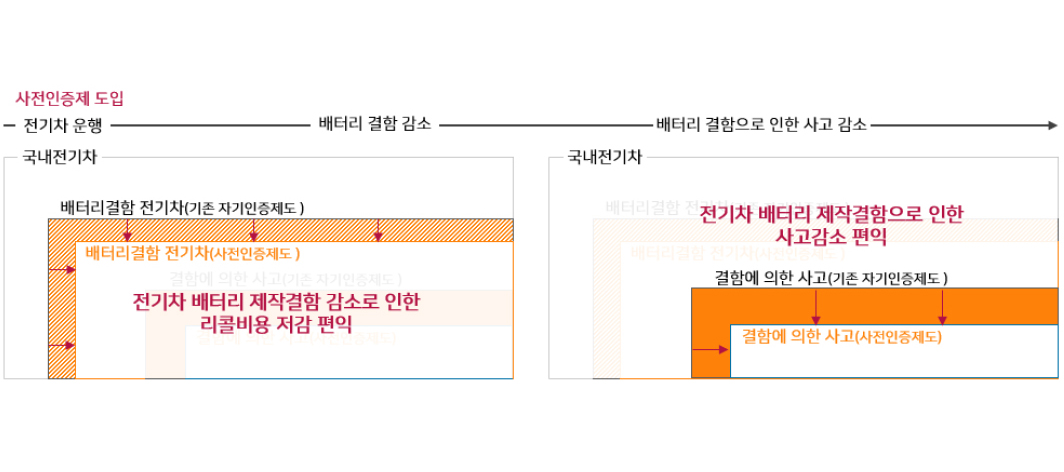
- This study verifies the feasibility of introducing an ex-ante safety certification system for electric-vehicle (EV) battery manufacturing through a cost–benefit analysis. Benefits …
- This study verifies the feasibility of introducing an ex-ante safety certification system for electric-vehicle (EV) battery manufacturing through a cost–benefit analysis. Benefits are defined as reductions in recall costs from fewer manufacturing defects and reductions in accident costs from fewer battery-defect incidents, while costs consist of program operation expenses and manufacturers’ additional compliance burdens. EV deployment for 2025–2034 is projected under three policy-target attainment scenarios (100%, 83%, 60%), and the battery manufacturing defect rate is derived from 2020–2023 recall data with a downward adjustment for technological progress. The net effect of ex-ante certification is approximated by the average recall-rate gap between self-certification and type-approval regimes; the unit recall cost is estimated from battery price plus labor, converted to a base year and adjusted for declining production costs. Accident probability is proxied by the ratio of high-voltage battery fires to battery recalls, and accident costs are calculated annually from EV own-damage insurance losses, adjusted for falling battery production costs. As a result, recall-cost reduction benefits are estimated at KRW 7.5518 / 6.4398 / 5.0032 trillion across the three scenarios, accident-cost reduction benefits at KRW 22.42 / 19.12 / 14.85 billion, and costs at KRW 21.33 billion for program operation and KRW 45.29 billion for manufacturers, totaling KRW 66.59 billion. - COLLAPSE
-
Economic Analysis of the Ex-Ante Certification System for EV Production Safety
-
-
Experimental Evaluation of Manual and Powered Wheelchairs Using Sled Impact Test
수동 및 전동 휠체어의 충돌 모의 시험(Sled test) 평가 연구
-
Shinwook Kwon, Hyung Wo Park, Yongwoo Lee
권신욱, 박형원, 이용우
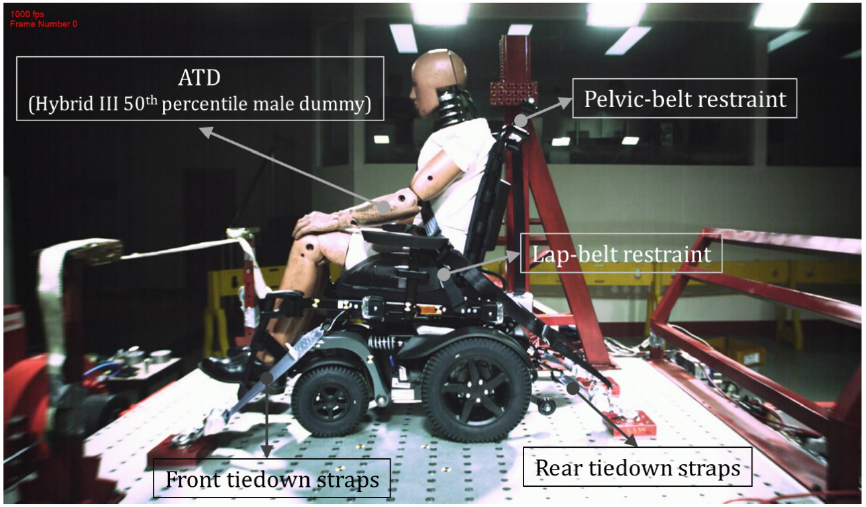
- This study investigates the crashworthiness of commercially available manual and powered wheelchairs when used as vehicle seats. Sled impact tests were conducted …
- This study investigates the crashworthiness of commercially available manual and powered wheelchairs when used as vehicle seats. Sled impact tests were conducted in compliance with the ISO 7176-19 standard using three manual and three powered wheelchair models. A four-point tiedown system and a three-point occupant restraint belt were applied in each test to evaluate dynamic crash performance. The structural integrity of the wheelchairs and the injury criteria of the anthropomorphic test device (ATD)-including HIC, neck force, chest acceleration, and femur force were analyzed. Except for one model, the backrest structures of all wheelchairs failed to meet the ISO 7176-19 structural strength requirements, whereas the ATD injury metrics satisfied the KMVSS safety thresholds. Notably, the rear tiedown hooks of powered wheelchairs fractured during impact, indicating that the current ISO standard, which is based on a surrogate wheelchair configuration, may not adequately account for the increased mass and dynamic loads of powered models. The findings highlight the need to reassess and reinforce tiedown strength requirements and to develop supplementary safety criteria that reflect the structural and mass characteristics of powered wheelchairs. - COLLAPSE
-
Experimental Evaluation of Manual and Powered Wheelchairs Using Sled Impact Test
-

-
A Study and Evaluation on Improving the Management System for Electrical and Electronic Components in Construction Machinery
건설기계 전기전자 분야 관리체계 개선에 관한 연구 및 평가
-
Seongjae Moon, Jinhwan Lee, Miji Kim, Danbi Oh, Jaehyoung Ryu
문성재, 이진환, 김미지, 오단비, 유재형
- The domestic safety standards for construction machinery were originally derived from the Japanese regulatory framework, indicating the need for further advancement through …
- The domestic safety standards for construction machinery were originally derived from the Japanese regulatory framework, indicating the need for further advancement through the application of international and domestic standards. In particular, safety requirements for electrical and electronic components remain insufficiently defined. This study reviews key categories specified in the Regulations on Safety Standards for Construction Machinery, analyzes accident cases and empirical data to identify deficiencies in the existing standards, and evaluates the current condition of lighting equipment through ingress protection tests. The findings of this study are expected to support future regulatory revisions and contribute to the enhancement of electrical and electronic safety in construction machinery. - COLLAPSE
-
A Study and Evaluation on Improving the Management System for Electrical and Electronic Components in Construction Machinery
-
-
A Study on the Verification of CAE for Frontal Impact Relax Posture Virtual Testing
정면 충돌 릴렉스 자세 버추얼 평가의 시뮬레이션 정합성 검증
-
Hong Ik Park, Hyun Mo Yang, Kap Seong Jeong
박홍익, 양현모, 정갑성
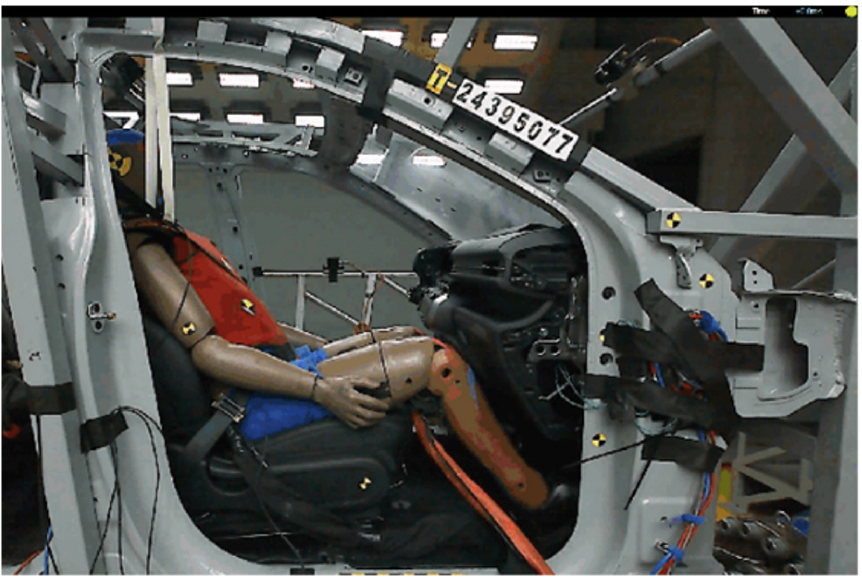
- With the advancements in autonomous driving technology, the potential for passengers to adopt a variety of postures in vehicles has emerged. Current …
- With the advancements in autonomous driving technology, the potential for passengers to adopt a variety of postures in vehicles has emerged. Current crash analysis methodologies primarily evaluate and optimize passenger postures based on typical sitting positions. However, there is a pressing need for the evaluation of diverse postures. In response to this evolving trend, various regions are preparing to assess passenger injuries associated with relaxed postures, with domestic market and China targeting evaluation post 2027. This paper examines the injury assessment of passengers in a resting position in the Korean New Car Assessment Program (KNCAP) to be launched later. Focusing on a 39-degree reclining posture for front seat passengers, this study evaluated the consistency of the actual crash test and the crash analysis, and to reveal a significant correlation between major injuries. Based on the results of this study, the consistency between the test and analysis of passenger safety in the relaxation posture is confirmed, and the criteria for introducing a virtual test methodology in the future are proposed. - COLLAPSE
-
A Study on the Verification of CAE for Frontal Impact Relax Posture Virtual Testing
-
-
A Study on the Test Conditions of Sled for Oblique Mobile Deformable Barrier Test in US NCAP
북미 NCAP 신경사 충돌 대응 슬레드 시험 조건 검토 연구
-
Seong Chan Yoon, Hong Ik Park, Yong Young Kim
윤성찬, 박홍익, 김용영
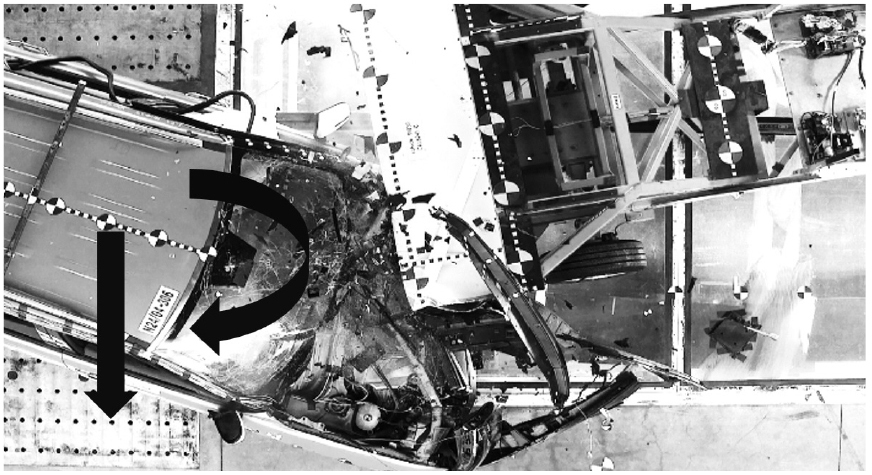
- In this paper, the magnitude of sled pulse and initial sled setting angle were reviewed to derive the sled conditions for reproducing …
- In this paper, the magnitude of sled pulse and initial sled setting angle were reviewed to derive the sled conditions for reproducing occupant injuries from the Oblique Mobile Deformable Barrier Test in US NCAP. 72 crash simulation were performed using validated simulation model and experimental data. A meta-model optimization identified optimal conditions accurately reproducing the Brain Injury Criterion and chest deflection values. The injury tendencies remained consistent despite changes to the restraint system. As a result, cost-effective and repeatable sled test conditions for sled crash tests were derived. - COLLAPSE
-
A Study on the Test Conditions of Sled for Oblique Mobile Deformable Barrier Test in US NCAP
-
-
A Study on Enhancing the Role of Vehicle Inspection from a Public Interest Perspective
공익적 관점에서 자동차검사 역할 제고에 관한 고찰
-
Hosang Lee, Taeseok Oh
이호상, 오태석
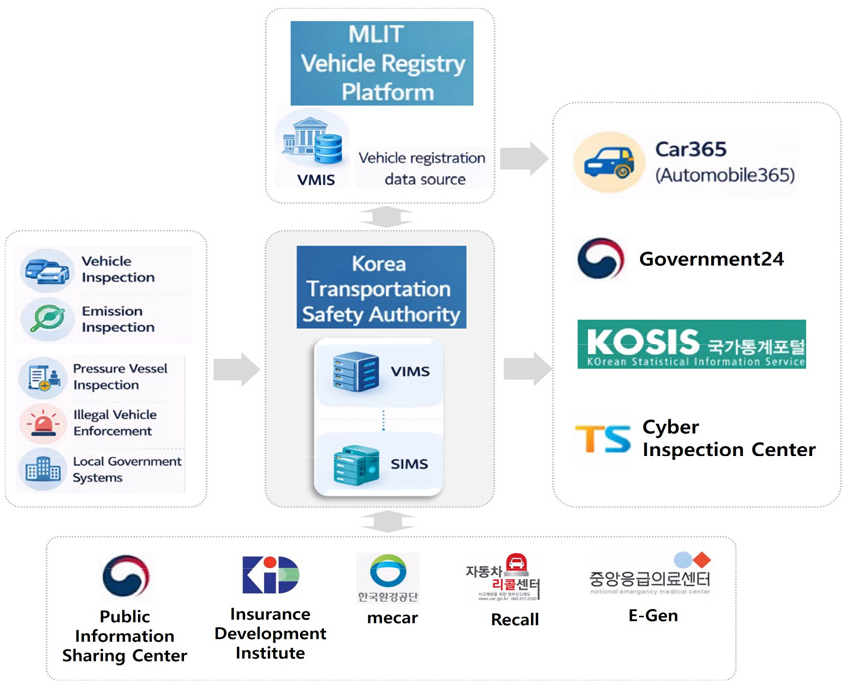
- This study systematically analyzes the value generated by Korea’s vehicle inspection system from four key perspectives—social, safety, environmental, and future-oriented—based on domestic …
- This study systematically analyzes the value generated by Korea’s vehicle inspection system from four key perspectives—social, safety, environmental, and future-oriented—based on domestic and international research data. The 2024 analysis reveals that the system prevents approximately 45,000 traffic accidents annually and generates 591.4 billion KRW in economic benefits. Furthermore, the findings demonstrate that the system encompasses diverse multi-dimensional values and serves as a comprehensive social infrastructure that sustains the foundation of the future mobility industry. Finally, this study proposes strategies to strengthen the role of future-oriented vehicle inspections. - COLLAPSE
-
A Study on Enhancing the Role of Vehicle Inspection from a Public Interest Perspective
-
-
Effect of Zn-based Colorants on the Hydrolytic Degradation of PBT and Corrosion of Aluminum
PBT의 가수분해와 알루미늄 부식에 미치는 Zn 안료의 영향
-
Sang Soo Jeon, Byung Su Kim, Jeon Mo Choi, Kang Il Jeon
전상수, 김병수, 최전모, 전강일
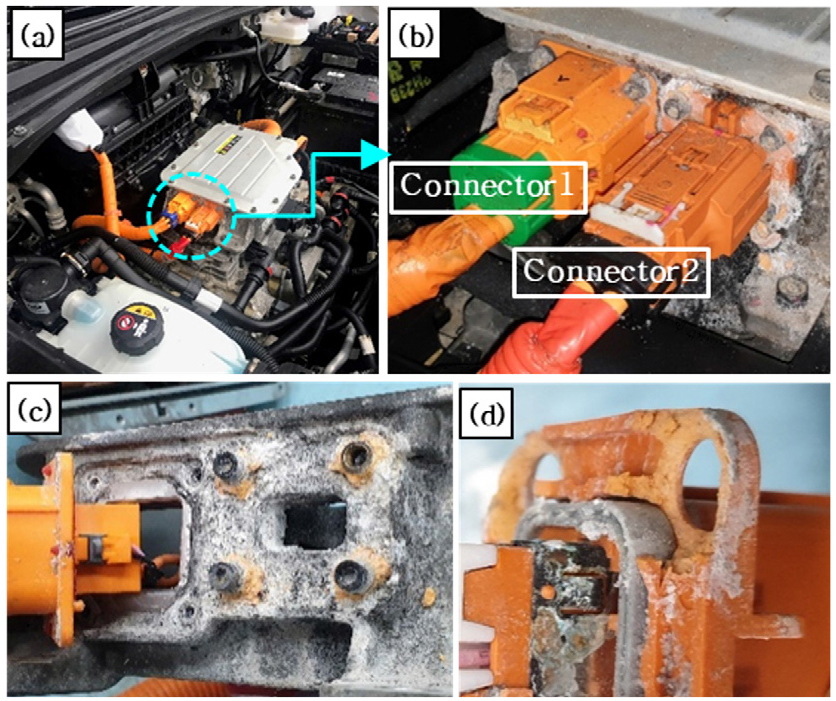
- In this study, the effects of Zn-based colorants on plastic degradation and the corrosion of metals in contact with degraded plastics were …
- In this study, the effects of Zn-based colorants on plastic degradation and the corrosion of metals in contact with degraded plastics were investigated. Poly (butylene terephthalate) (PBT) and Polyamide6,6 (PA66) were used as base resins and compounded with ZnO, ZnS, and TiO2 as white colorants. It was confirmed that the flexural strength dramatically decreased under accelerated conditions of 130℃ and 85% RH only when ZnS or ZnO was added to the ester-based PBT compounds. Under high temperature and humidity conditions, the added Zn-based colorants acted as strong Lewis acids in the form of Zn2+ ions, thereby accelerating the hydrolysis of PBT. FT-IR spectroscopy and end-group analysis of the degraded PBT confirmed that the ester linkages were depolymerized to generate carboxylic acids. Carboxylic acids derived from PBT degradation attacked contacting aluminum, causing surface corrosion and the release of Al3+ ions. This process eventually resulted in the formation of white aluminum oxides and aluminum hydroxides, such as Al2O3 and Al(OH)3. Furthermore, the Al3+ ions released during corrosion acted as Lewis acid catalysts, similar to Zn2+ ions, thereby accelerating the degradation of PBT. In conclusion, the catalytic degradation of PBT by Zn-based colorants and the corrosion mechanism of aluminum induced by the carboxylic acids from degraded PBT were chemically elucidated. Based on these findings, material specifications were updated to prohibit the use of Zn-based colorants in ester-based plastics. - COLLAPSE
-
Effect of Zn-based Colorants on the Hydrolytic Degradation of PBT and Corrosion of Aluminum
-
-
Evaluation of Autonomous and Manual Vehicle Interactions Based on Psychological Safety Margin Using Waymo Open Dataset
Waymo Open Dataset을 활용한 심리적 안전 마진 기반 자율차-비자율차 상호작용 평가
-
Yuanming CUI, Hoyoon LEE, Cheol OH
최원명, 이호윤, 오철
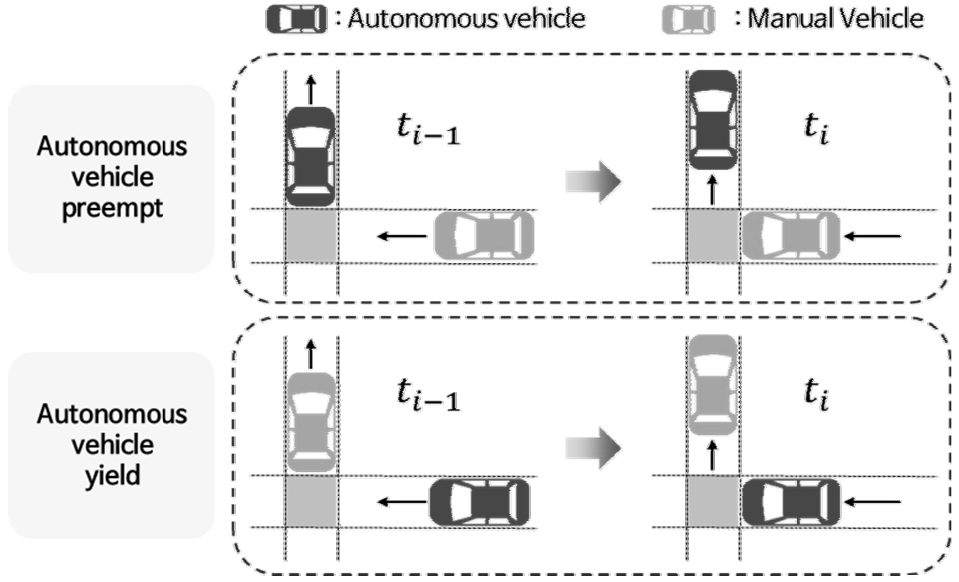
- The advancement of autonomous driving technology has heightened the need to ensure not only physical safety but also the psychological safety of …
- The advancement of autonomous driving technology has heightened the need to ensure not only physical safety but also the psychological safety of human drivers in mixed traffic environments. Existing interaction safety metrics, such as Post-Encroachment Time (PET), provide thresholds for physical conflicts but fail to reflect the psychological safety of manual vehicle drivers interacting with autonomous vehicles. This study defines psychological safety as a state in which a human driver of a manual vehicle does not feel anxiety due to the behavior of an autonomous vehicle. Accordingly, we propose that interaction safety evaluation criteria should complement existing physical safety indicators by explicitly incorporating psychological safety. The proposed methodology is to assess autonomous vehicle–manual vehicle interaction safety based on the Psychological Safety Margin (PSM), defined as the set of preemptive and yielding threshold speeds within which an autonomous vehicle can pass through an intersection whilst ensuring the psychological safety of the human driver. Based on the PSM, a Psychological Safety Zone (PSZ) and a Psychological Risk Zone (PRZ) are further established; when the autonomous vehicle's speed falls within the PSZ, the driver's psychological safety is ensured, whereas a speed within the PRZ indicates it is not. A Psychological Safety Score (PSS) was derived by scoring the proportion of interaction time satisfying the PSZ, and utilized as an interaction safety assessment index. The proposed methodology was applied to the Waymo Open Dataset, and the results quantitatively demonstrate differences in psychological safety levels by intersection types and interaction scenarios. The outcome of this study can contribute to establishing psychological safety evaluation criteria for improving the social acceptability of autonomous driving technology. In addition, it is expected to support the assessment of autonomous vehicle driving performance and the development of speed management strategies accounting for the psychological safety of road users. - COLLAPSE
-
Evaluation of Autonomous and Manual Vehicle Interactions Based on Psychological Safety Margin Using Waymo Open Dataset

Journal Informaiton
 Journal of Auto-vehicle Safety Association
Journal of Auto-vehicle Safety Association
Journal of Auto-vehicle Safety Association






한국자동차모빌리티안전학회
Rm. 2001, 13, Seoun-ro, Seocho-gu, Seoul, Republic of Korea
Tel: +82-2-581-8015~6 / E-mail: jlee@kasa.kr Copyright© Korean Auto-vehicle Safety Association. Powered by APUB
Tel: +82-2-581-8015~6 / E-mail: jlee@kasa.kr Copyright© Korean Auto-vehicle Safety Association. Powered by APUB