

1. 서 론
2. 관련 연구
2.1. UAV 기반 3차원 재구성 및 포토그래메트리 연구
2.2. NeRF 및 3D GS 연구
2.3. UAV 자율비행을 위한 3D 지도 및 경로 계획 연구
3. 이론적 배경
3.1. Structure-from-Motion(SfM)
3.2. Multi-View Stereo(MVS)
3.3. Mesh Reconstruction
3.4. 3D Gaussian Splatting(3D GS)
3.5. UAV 자율비행과의 연계성
4. 실 험
4.1. 실험 개요
4.2. 데이터 및 모델 구축
4.3. 경로 탐색 환경 및 알고리즘
4.4. 실험 결과
4.5. 고찰 : 경로 탐색과 3D 모델링
5. 결 론
1. 서 론
무인항공기(Unmanned Aerial Vehicle, UAV)를 활용한 항공 영상 기반 3차원 모델링 기술은 최근 정밀지도 제작, 시설물 관리, 도시계획, 자율비행 경로 생성 등 다양한 산업·학술 분야에서 핵심 데이터 취득 수단으로 자리매김하고 있다. 특히 고해상도 RGB 이미지와 GNSS/IMU 기반의 정밀 위치 정보가 결합되면서, 경량 UAV만으로도 수 센티미터 수준의 지상해상도(Ground Sampling Distance, GSD)를 확보할 수 있어 복잡한 지형·건물·조경 등이 포함된 실외 환경에 대한 고정밀 3차원 복원 수행이 가능해졌다.(1) 이러한 3차원 모델은 UAV 자율비행을 위한 장애물 회피, 충돌 방지, 안전 경로 계획 등의 핵심 기반 정보로 활용되기 때문에, 모델의 정확도·견고성·실시간성이 자율비행 시스템의 신뢰성과 직결된다.
기존 UAV 기반 3D 모델링 기술은 주로 Structure-from-Motion(SfM)과 Multi-View Stereo(MVS)에 기반한 기하학적 접근을 활용해 왔다.(2) 이 방법은 특징점 기반 정합과 다중 시점 깊이 추정을 통해 고밀도 점군(dense point cloud)을 생성하고, 이를 삼각형 메쉬(mesh)로 재구성하여 텍스처 매핑(texture mapping)을 수행하는 절차로 구성된다. 상용 소프트웨어(DJI Terra, Agisoft Metashape 등)와 오픈소스(COLMAP 등)를 기반으로 높은 수준의 공간적 정밀도를 달성할 수 있으며, UAV 분야에서는 사실상 표준 3D 복원 기법으로 활용되고 있다. 그러나 메쉬 기반 모델은 복잡한 구조물 주변의 노이즈, 표면의 불연속성, 수목·잔디 등 비정형 지형에서의 불안정성, 시점 변화에 따른 시각적 부조화 등의 한계가 존재하며, 특히 자율비행용 환경 인식에서는 이러한 오차가 잠재적 위험 요인으로 작용할 수 있다.(3)
한편, 최근에는 Neural Radiance Field(NeRF) 계열 기술이 고품질 시각적 재구성 분야에서 큰 발전을 이끌었으며, 그중에서도 3D Gaussian Splatting(3D GS)은 수백만 개의 3D Gaussian을 사용해 장면을 연속적으로 표현하고, differentiable splatting을 활용하여 기존 메쉬 기반 기술보다 빠르고 사실적인 렌더링을 달성한 기법으로 주목받고 있다.(4) 3D GS는 NeRF와 달리 신경망 기반 Multilayer Perceptron(MLP)을 사용하지 않고 명시적(explicit) 3D 표현을 활용하므로, 학습 속도와 렌더링 속도가 빠르고 자원 소모가 적다는 장점을 지닌다.(5) 더불어 photometric consistency를 기반으로 전역적인 장면 구조를 정교하게 복원할 수 있어 기존 SfM/MVS 기반 메쉬 모델과는 상이한 특성을 가진다.
그러나 UAV 자율비행 관점에서 3D Mesh 모델과 3DGS 모델의 성능을 동일한 항공영상 입력 조건 하에서 체계적으로 비교한 연구는 매우 부족하다. 대부분의 선행 연구는 PSNR, SSIM, LPIPS 기반 시각적 품질, novel-view 합성 등 영상 중심의 관점에서 NeRF와 3D GS의 성능을 평가하였으며, 자율비행·경로 계획과 연계된 분석은 제한적으로만 수행되어 왔다.(6,7) UAV 자율비행 시스템에서는 3차원 재구성 모델의 시각적 품질뿐 아니라 기하학적 정확도, 점유 공간(Occupancy)의 안정성, 장애물 표면의 경계 표현력, 경로 생성 시의 충돌 가능성, 그리고 실시간성이 모두 중요하게 작용한다.
따라서 본 연구에서는 세명대학교 캠퍼스 지역에서 촬영된 항공사진 약 500장을 기반으로, SfM/MVS를 이용한 3D Mesh 모델과 3D Gaussian Splatting 기법을 이용한 3D GS 모델을 각각 구축하고, UAV 자율비행 환경에서 RRT* 알고리즘을 이용한 경로 탐색 시뮬레이션을 통해 이 두 모델의 자율비행 적합성 비교를 수행한다. 본 연구는 UAV 자율비행을 위한 3D 지도 표현 방식 선택에 있어 기술적 판단 기준을 제시한다는 점에서 의미를 갖는다.
2. 관련 연구
2.1. UAV 기반 3차원 재구성 및 포토그래메트리 연구
UAV에서 획득한 항공영상은 고기동성과 높은 공간해상도를 바탕으로 정밀 공간정보 구축, 시설물 모니터링, 재난·안전 관리 등 다양한 분야에서 활용되고 있다. 기존 포토그래메트리 기반 3차원 재구성 기법은 특징점 추출-SfM-MVS-Mesh 생성으로 이어지는 표준 절차를 통해 고밀도 점군 및 정밀 메쉬 모델을 제공해 왔다.(8) 특히 SfM 단계에서의 BA(Bundle Adjustment)는 카메라 자세와 3D 점을 동시에 최적화함으로써 전역적으로 일관된 구조를 복원하는 데 중요한 기여를 하였으며, MVS는 깊이 맵 일관성 검증과 포인트 정합 기술의 발전으로 수십~수백만 개 수준의 고밀도 점군을 안정적으로 생성할 수 있도록 하였다.(9)
이러한 성과 덕분에 포토그래메트리 기반 메쉬 모델은 도심 지역 3D 맵핑, 대규모 지형 측량, 문화재 디지털 보존 등 다양한 실증 연구에서 높은 정밀도를 입증하였다. 특히 건물 외벽, 도로 구조, 인공 구조물 등 기하학적 형태가 뚜렷한 대상에서는 수 cm 단위까지의 높은 정확도를 제공하여 UAV 매핑 분야의 사실상 표준 기술로 자리 잡았다. 그러나 반복 텍스처(창문 패턴)·저텍스처 영역(잔디, 아스팔트)·수목과 같은 비정형 객체에서는 깊이 오차가 증가하며, 메쉬 표면의 불연속성과 노이즈가 잦게 발생하는 한계가 보고되었다.(10) 이러한 한계는 UAV 자율비행에서의 장애물 경계 인식·근접 구조물 탐지 성능에 직접적인 영향을 미치므로, 메쉬 기반 접근만으로는 안정적인 비행환경 구축이 어려울 수 있다.
2.2. NeRF 및 3D GS 연구
NeRF는 고품질 novel-view 생성 분야에서 혁신을 이끌며 장면의 연속적인 방사 특성(Radiance Field)을 신경망으로 모델링하는 방식을 제시하였다. 그러나 NeRF 계열은 MLP 기반 implicit 표현 특성상 학습 비용이 높고 실시간 렌더링에 제약이 있으며, UAV와 같은 대규모·고해상도 실외 장면에서는 효율성이 떨어지는 문제가 보고되었다.(4)
3D GS는 이러한 NeRF의 한계를 해결하기 위해 등장한 명시적 3D 표현 방식으로, 수백만 개의 3차원 Gaussian을 사용하여 장면을 표현하고 differentiable splatting을 통해 매우 빠른 속도로 사진 수준의 시각적 품질을 제공한다는 점에서 큰 성과를 거두었다.(5) 특히, 3D GS는 NeRF 대비 학습 속도가 수십 배 빠르고, 고해상도 장면에서도 실시간 렌더링이 가능하며, 광학적으로 일관된 표현력을 제공한다는 점에서 실용성이 높다. 최근 연구에서는 3D GS를 활용한 SLAM, 이동체 내비게이션, 대규모 실외 매핑 분야의 실증 연구가 제시되며 로봇·자율주행 분야에서의 응용 가능성이 빠르게 확장되고 있다.
그러나 3D GS 관련 연구의 대부분은 novel-view 품질, 렌더링 속도, 압축 효율성 등 시각적 측면을 중심으로 평가하고 있으며, UAV 자율비행을 위한 운영 효율성 측면에서의 경로 생성 적합성에 대한 정량적 분석은 매우 부족한 상황이다. 특히 SfM/MVS 기반 Mesh 모델과 3D GS 모델을 동일 UAV 촬영 조건에서 직접 비교하는 연구는 거의 제시되지 않았으며, 두 방식이 UAV 환경 인식 및 자율비행 안정성에 미치는 영향은 명확히 검증되지 않았다.
2.3. UAV 자율비행을 위한 3D 지도 및 경로 계획 연구
UAV 자율비행에서는 환경의 3차원 구조를 정확히 반영한 환경지도를 기반으로 장애물을 탐지하고, 충돌을 회피하며, 미션 목표에 도달하기 위한 최적 경로를 생성하는 과정이 필수적이다. 이를 위해 점유격자(Occupancy Grid), Octomap, ESDF(Euclidean Signed Distance Field), voxel grid, 메쉬 지도 등 다양한 공간 표현 기법이 활용되고 있으며, 이들 지도 품질은 자율비행 알고리즘의 성공률과 안전성을 좌우한다. 예를 들어, false-free 영역이 많으면 실제 존재하는 장애물을 인식하지 못해 충돌 위험이 증가하고, 반대로 false-occupied 영역이 많으면 필요 이상의 우회 경로가 생성되어 비효율적 비행이 발생한다.(11)
경로 계획 측면에서는 RRT/RRT*, A*, 3D-VFH, local replanning 기반 접근법들이 널리 사용되어 왔으며(12~14), 이들 알고리즘은 모두 입력되는 3D 지도 표현의 정확도와 노이즈 수준에 민감하게 반응한다. 최근 연구에서는 딥러닝 기반 장면 재현 기술(NeRF, 3D GS)을 로봇 비전 및 자율주행 분야에서 활용하려는 시도가 늘고 있으나, UAV 환경에서는 아직 점유공간 인식의 안정성, 근접 장애물 표현력, 경로 생성의 충돌률 감소 효과 등 핵심 성능을 종합적으로 비교·검증한 연구가 부족하다.
따라서 기존 연구들의 성과를 종합해 보면, (1) SfM/MVS 기반 메쉬 모델은 높은 기하학적 정밀도를 제공하나 비정형 환경에서의 불안정성이 존재하고, (2) 3D GS는 시각적·연산적 성능에서 뛰어나지만 자율비행 환경에서의 안전성 검증이 부족하며, (3) 두 방식의 장단점을 UAV 자율비행 관점에서 체계적으로 비교한 연구가 부재함을 알 수 있다. 이러한 배경에서 본 연구는 동일 UAV 데이터셋을 기반으로 두 방법의 3D 모델을 생성하고, 경로 계획 측면에서 두 기법의 적합성을 평가함으로써 UAV 자율비행용 3D 지도 표현 방식 선택에 실증적 근거를 제시하고자 한다.
3. 이론적 배경
본 장에서는 UAV 항공영상을 활용한 3차원 재구성에서 일반적으로 사용되는 SfM/MVS 기반 3D Mesh 모델링과 최근 각광받는 3D GS 기법의 원리를 정리한다. 두 기법은 모두 다중 시점 영상으로부터 장면의 3차원 구조를 복원한다는 공통점을 가지지만, 장면 표현 방식과 데이터 활용 특성에서 근본적인 차이를 보인다. 본 연구에서는 이러한 차이가 UAV 자율비행을 위한 환경지도 표현 방식에 어떤 영향을 미치는지 분석하기 위해, 각 기법의 핵심 원리를 명확히 정리하는 데 초점을 둔다.
3.1. Structure-from-Motion(SfM)
SfM은 서로 다른 시점에서 촬영된 UAV 영상들의 특징점을 정합하여 카메라 자세 추정(Camera Pose Estimation)과 장면의 3D 구조 복원을 동시에 수행하는 기술이다. 첫 단계에서 영상 내 코너, 패턴, 엣지 등 구별 가능한 특징점을 추출하고, 이들을 다중 영상에서 대응시키는 과정을 통해 이미지 간 상대적인 기하 구조를 파악한다. 이후 에피폴라 기하 관계(Epipolar Geometry)에 기반하여 카메라 회전과 병진을 계산하고, Bundle Adjustment를 통해 모든 카메라 파라미터와 3차원 점의 위치를 전역적으로 최적화함으로써 일관된 sparse point cloud를 생성한다. SfM 단계는 장면의 전체적인 구조적 프레임워크를 제공하며, 점군(point cloud) 밀도는 낮지만 기하학적 일관성과 전역적인 공간 배치 측면에서 높은 안정성을 보인다.
3.2. Multi-View Stereo(MVS)
MVS는 SfM 단계에서 복원된 카메라 자세를 기반으로, 이미지 간 시각적 일치도(photometric consistency)를 이용하여 각 픽셀의 깊이(Depth)를 정밀하게 추정하고 고밀도(dense) 점군을 형성하는 과정이다. 일반적인 MVS 알고리즘은 단일 뷰에서 후보 깊이를 가정한 뒤, 인접 영상에서 동일 공간 위치가 어떤 깊이일 때 가장 유사하게 보이는지를 비교함으로써 최적의 깊이를 결정한다. 최근의 PatchMatch 계열 알고리즘은 랜덤 탐색과 정규화된 비용 함수를 활용하여 넓은 탐색 공간에서도 빠른 수렴을 보이며, UAV 영상과 같이 반복 패턴·식생·비정형 구조가 혼합된 환경에서도 안정적인 성능을 제공한다. 최종적으로 생성된 dense point cloud는 수백만 개 이상의 점을 포함하며, 메쉬 생성의 기반 데이터를 제공한다.
3.3. Mesh Reconstruction
메쉬 재구성 단계에서는 MVS 점군을 바탕으로 삼각형 기반의 표면(surface) 모델을 생성한다. 일반적으로 포아송(Poisson) 기반 표면 복원 알고리즘이 널리 사용되며, 점군의 위치와 법선(normals)을 입력으로 공간 전체에 대한 연속적인 표면 함수를 추정한다. 이후 삼각형 메쉬를 생성하고 원본 영상 텍스처를 매핑하여 시각적 일관성을 강화한다. 메쉬 모델은 구조물의 형태를 명확하게 표현하는 장점이 있어 도시 구조물, 도로, 인공 구조물 복원에 널리 사용된다. 다만 복잡한 식생, 반사체, 동일 패턴 반복 영역 등에서는 표면이 불연속적이거나 노이즈가 증가할 수 있으며, 시점 변화에 따라 텍스처 왜곡·격자화 현상이 발생할 수 있다는 한계가 존재한다.
3.4. 3D Gaussian Splatting(3D GS)
3D GS는 최근 제안된 고속·고품질 3차원 장면 재구성 기법으로, 장면을 다수의 3차원 가우시안 분포(3D Gaussian)들의 집합으로 명시적으로 표현한다. 각 Gaussian은 위치, 공분산(크기·방향), 색상, 불투명도 등의 파라미터를 가지며, 이를 통해 장면의 미세한 광학적·기하학적 특성을 연속적으로 모델링한다. 새로운 시점에서의 렌더링은 Gaussian을 이미지 평면으로 투영(splat)하여 투명도 기반으로 색을 혼합하는 방식으로 이루어지며, GPU 병렬화에 적합해 실시간 렌더링 수준의 속도를 제공한다.
3D GS의 학습은 원본 UAV 이미지와 Gaussian 기반 렌더링 이미지 간 차이를 최소화하는 방향으로 파라미터를 반복적으로 최적화하는 방식으로 진행된다. 이 과정은 NeRF와 달리 MLP 기반의 암시적(implicit) 표현이 아닌 직접적인 3D 파라미터 조정으로 이루어지기 때문에 학습 속도가 수십 배 빠르고, 고해상도 영상에서도 효율적으로 동작한다. 이러한 특성 덕분에 3D GS는 매우 자연스럽고 부드러운 표현을 제공하며, photometric fidelity가 높아 novel-view 합성과 같은 시각적 응용에서 우수한 성능을 보인다.
그러나 Gaussian 기반의 명시적 표현은 각 Gaussian이 공간적으로 확산된 형태(공분산)에 의해 장면의 경계가 점진적으로 퍼져 보이는(blurring) 특성을 갖는다. 이는 실제 물체의 모서리나 날카로운 구조가 메쉬 기반 모델처럼 뚜렷하게 정의되지 않고, 확률적 점유 공간이 넓게 표현되는 기하학적 특성으로 이어진다. 이러한 경계 모호성은 충돌 검사 단계에서 장애물의 크기와 점유 영역을 실제보다 크게 판단하게 만들며, 결과적으로 경로 계획 알고리즘이 안전 여유를 확보하기 위해 더 보수적인 장애물 회피 경로를 생성하도록 유도한다. 특히 RRT*와 같은 샘플링 기반 알고리즘에서는 이러한 확장된 점유 공간이 탐색 공간 내 제약으로 작용하여 긴 경로 및 더 많은 경로점을 생성하는 결과로 이어질 수 있다. 따라서 3D GS는 시각적으로는 고품질의 연속적 표현을 제공하지만, UAV 자율비행에서 요구되는 정밀한 장애물 경계 인식 측면에서는 추가적인 검증이 필요하다.
3.5. UAV 자율비행과의 연계성
UAV 자율비행을 위한 3차원 지도는 단순한 시각적 품질을 넘어, 구조적 정확도, 장애물 경계의 선명도, 점유 공간 표현의 안정성, 경로 계획과의 결합성 등 복합적인 요구 사항을 만족해야 한다. SfM/MVS 기반 메쉬 모델은 기하학적으로 명확한 구조를 제공하는 반면, 텍스처 기반 시각적 불연속성과 복잡 지형에서의 불안정성이 문제로 지적된다. 반대로 3D GS는 시각적으로 부드럽고 photometric 품질이 높지만, Gaussian 기반 표현 특성으로 인해 미세 기하구조의 정확도는 감소할 가능성이 있다.
따라서 두 기법의 장·단점을 UAV 자율비행 맥락에서 정량적으로 비교하는 것은 매우 중요한 연구로 평가된다.
4. 실 험
4.1. 실험 개요
본 연구는 UAV 자율 항법의 핵심인 경로 계획(Path Planning) 측면에서 전통적인 3D Mesh 모델과 최신 3D GS 모델의 유효성을 정량적으로 비교하는 것을 목표로 한다.
4.2. 데이터 및 모델 구축
항공 촬영은 세명대학교 캠퍼스 내 주요 빌딩 밀집 구역의 항공사진 500여 장을 사용하였다. 3D 모델링의 정확도 향상을 위해 촬영 지역의 특성상 고도차가 100 m 이상 발생하여 드론의 지형추적비행을 안정적으로 수행하기 위해 Digital Surface Model(DSM) 기반의 고도맵을 먼저 구축하였다. 이를 이용하여 경사촬영을 위한 고도 기반 비행경로를 생성하였고, 모든 이미지는 DJI Matrice 300 RTK 드론으로 촬영되었으며 직하(Nadir) 및 경사(Oblique) 시점이 혼합되어 있다. 촬영된 이미지 500여 장은 COLMAP 기반 SfM/MVS 파이프라인을 통해 Sparse Reconstruction과 Dense Reconstruction을 거쳐 3D Mesh 모델로 변환되으며, 표면 재구성은 푸아송(Poisson) 알고리즘을 적용하였다. 동일한 데이터셋은 3D GS 공개 소스를 활용하여 다중시점 광학 정보 기반의 Gaussians 학습을 수행하고, 최종적으로 렌더링 가능한 3D GS 장면 표현으로 변환되었다.
4.3. 경로 탐색 환경 및 알고리즘
UAV의 이동 시나리오는 두 개의 주요 건물 사이를 비행하여 목표 지점까지 이동하는 형태로 설정하였다. 시작점(Start)과 목표점(Goal)은 두 모델에서 동일한 좌표계 하에 배치하였으며, 경로 생성 알고리즘으로는 RRT*(Rapidly-exploring Random Tree Star)를 사용하였다. RRT*는 충돌 회피와 최적 경로 탐색을 동시에 수행하여 UAV 자율 비행 경로 계획에 적합하다. 실험에서는 RRT*가 확률적 알고리즘임을 고려하여, 각 모델에 대해 50회 반복 실험을 수행하였다.
4.4. 실험 결과
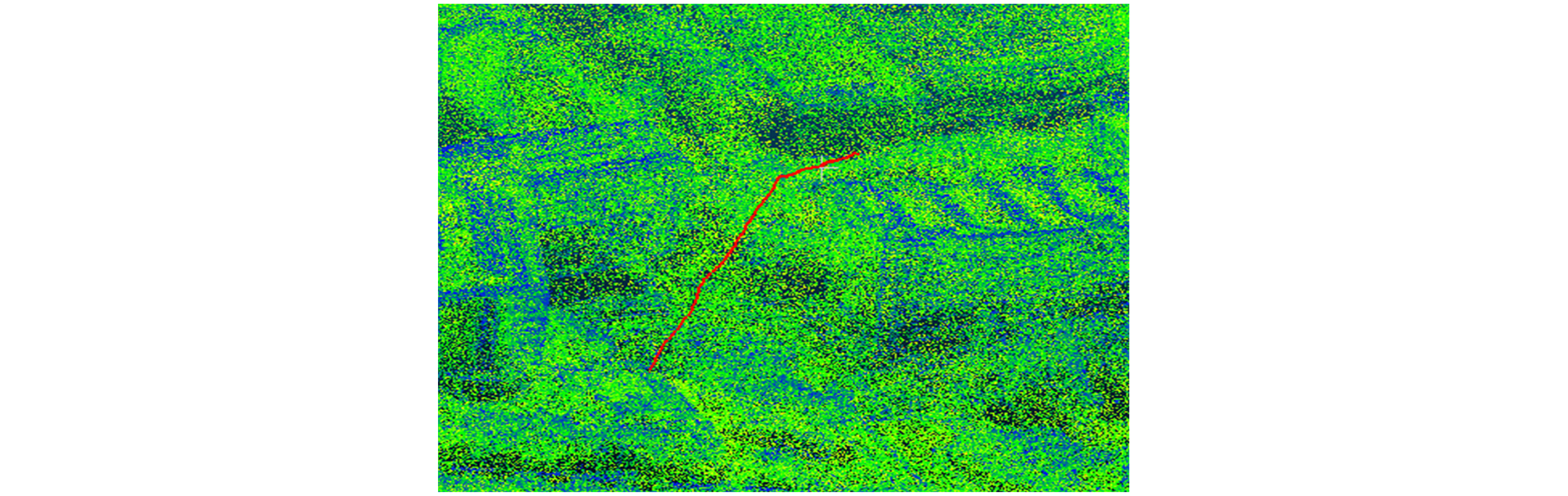
실험을 기반으로 평균 경로 길이, 경로점 수, 탐색 시간을 측정하였으며, 결과값은 Table 1과 같고 각 모델을 이용하여 도출된 경로의 예시가 Fig. 1과 Fig. 2에 각각 나타나 있다.
Table 1.
Performance comparison
| Path length (m) | Waypoints (count) | Planning time (s) | |
| 3D Mesh | 128.81 | 55 | 7.80 |
| 3D GS | 163.55 | 73 | 38.60 |
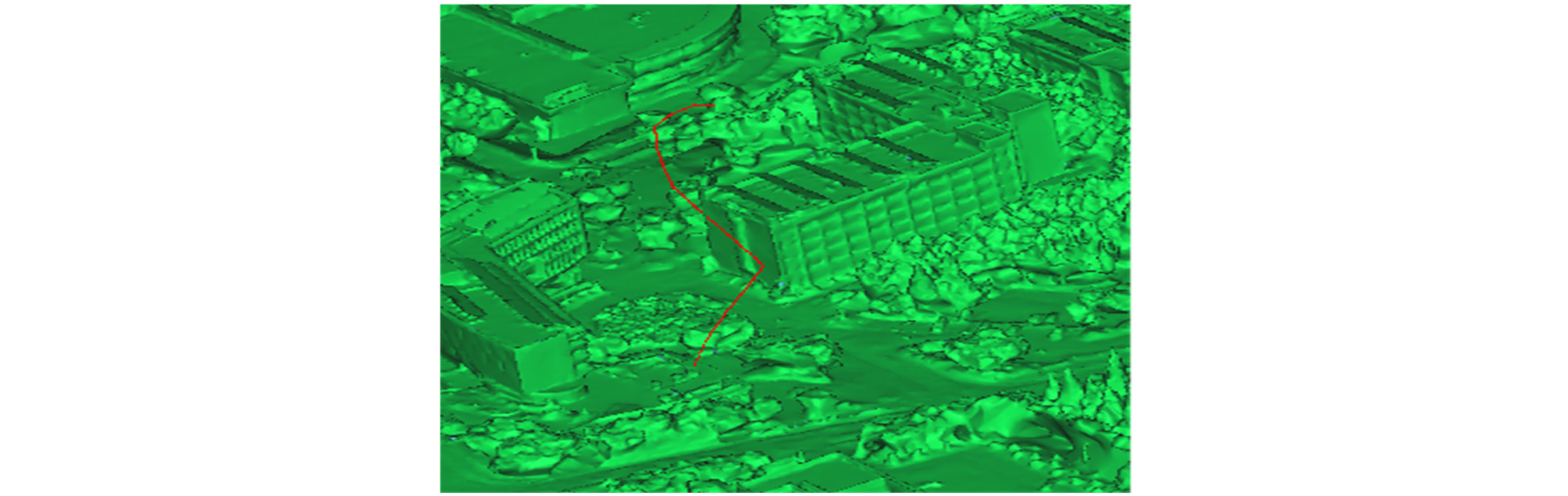
경로 탐색 시간(Planning Time)은 3D Mesh 모델이 평균 7.8초로, 3D GS 모델의 38.6초에 비해 약 5배 빨랐다. 이는 3D GS 모델의 높은 데이터 밀도에 기인한다. 3D GS 모델은 미세 구조 표현을 위해 매우 조밀한 포인트를 생성하며, 이에 따라 KDTree 구축과 충돌 검사 비용이 Mesh 모델 대비 현저히 증가하였다. 따라서, 경로 계획의 신속성 측면에서는 3D Mesh 모델이 더 효율적임을 의미한다.
3D GS 모델은 평균 73개의 경로점(Waypoints)을 사용하여 3D Mesh 모델의 55개보다 경로점 수가 약 32% 많았다. 3D Mesh 모델은 단순화 과정을 거치며 장애물 경계가 비교적 매끄럽게 정의되어, RRT* 알고리즘의 Rewiring 단계가 효율적으로 작동하여 단순하고 제어가 쉬운 경로를 생성하였다. 반면에 3D GS 모델은 조밀한 데이터와 잠재적인 노이즈 및 아티팩트 때문에 장애물 경계가 복잡하게 인식되었고, 이에 따라 RRT* 알고리즘이 미세한 굴절을 경로에 반영하여 경로점 수가 증가하였다. 이는 실제 UAV 제어 시 불필요한 기동을 유발할 수 있어 경로 추종(Path Following) 난이도를 높일 수 있다.
두 모델의 경로 길이(Path Length)는 3D GS 모델이 3D Mesh 모델보다 상대적으로 긴 경로를 생성했음을 확인할 수 있다. 3D GS 모델에서 경로 길이가 약간 길게 측정된 것은, GS 모델이 3D Mesh 모델에서 생략될 수 있는 미세한 장애물(예: 나뭇가지, 돌출물)까지 반영하여 회피 경로를 생성했음을 의미한다.
따라서, 3D Mesh 모델은 안정적이고 빠른 경로 탐색을 제공하여, 운용 전(Pre-flight) 계획 및 비행 제어 안정성이 중요할 때 우위를 가진다. 반면, 3D GS 모델은 느린 탐색 시간에도 불구하고 높은 디테일의 환경 정보를 반영하므로, 정밀한 미세 경로 회피가 필요한 응용 분야(예: 좁은 통로 통과)에서는 그 가치를 가질 수 있다. 결론적으로, UAV 경로 계획을 위한 실행 효율성(탐색 시간) 측면에서는 3D Mesh 모델이 현재 연구 환경에서 더 적합한 3D 모델링 정보를 제공하는 것으로 판단된다.
4.5. 고찰 : 경로 탐색과 3D 모델링
UAV 자율비행에서 경로 계획 알고리즘의 성능은 입력으로 활용되는 3차원 환경 모델의 정확도에 직접적으로 의존한다. 본 연구에서는 RRT* 알고리즘을 기반으로 3D Mesh 및 3D GS 모델의 경로 탐색 성능을 비교하였으나, 이러한 분석 틀은 RRT 계열 알고리즘뿐 아니라 다양한 경로 계획 기법에도 같게 확장 적용될 수 있다. 실제로 UAV 자율비행 분야에서는 A*와 같은 그래프 기반 알고리즘,(15) Artificial Potential Field(APF)와 같은 에너지 분포 기반 알고리즘,(16) Genetic Algorithm(GA) 등 지능형 최적화 알고리즘(17) 모두 3차원 공간에서의 충돌 검사와 점유 공간 표현에 크게 의존하며, 이는 3D Mesh 또는 3D GS 모델이 제공하는 기하학적 특성과 직접적으로 연동된다.
특히 SfM/MVS 기반 3D Mesh 모델은 기하학적 구조가 명확하고 계산 부하가 상대적으로 낮아, A*와 같은 격자·그래프 기반 탐색 알고리즘이나 APF 기반 최적화 기법에서 신속한 충돌 검사와 안정적인 경계 해석에 적합하다. 반면, 3D GS 모델은 Gaussian 기반의 연속적 장면 표현 특성으로 인해 미세 장애물·복잡 지형을 더 정확하게 반영하므로, RRT*-Smart, IB-RRT* 등 환경의 세밀한 변화를 고려하는 알고리즘에서 높은 잠재력을 가진다. 예를 들어, 협소한 통로 및 복잡 구조물 주변에서 고해상도 점유 공간을 필요로 하는 알고리즘은 3D GS 모델의 풍부한 환경 표현을 통해 더욱 세밀한 경로 회피를 수행할 수 있다.
따라서, RRT* 알고리즘을 통해 관찰된 3D Mesh의 빠른 탐색 성능과 3D GS의 고정밀 환경 인식 능력은 특정 알고리즘에 국한된 특성이 아니라, 대부분의 글로벌·로컬 경로 계획 방법에 일반적으로 적용 가능한 결과이다. 이는 향후 연구에서 다양한 경로 계획 알고리즘(A*, APF, GA 기반 탐색 등)에 3D Mesh 및 3D GS 모델을 결합하여 알고리즘–환경모델 조합별 성능 최적화를 탐구할 필요성을 제시한다. 더 나아가, 3D Mesh 모델의 기하학적 안정성과 3D GS 모델의 photometric 정밀도를 통합한 하이브리드 3D 표현 기반 경로 계획 프레임워크 또한 UAV 자율비행 분야에서 중요한 연구 방향이 될 수 있다.
5. 결 론
본 연구는 UAV 자율 항법 시스템의 핵심인 3차원 환경 모델링 기법의 실용적 유효성을 정량적으로 분석하기 위해 수행되었다. 전통적인 SfM-MVS 기반 3D Mesh 모델과 최근 주목받는 3D GS 모델을 동일한 항공 데이터셋으로 구축하고, RRT* 경로 계획 알고리즘을 적용하여 두 모델의 성능을 경로 길이, 경로점 수, 탐색 시간을 기준으로 비교하였다. 현재의 UAV 자율 항법 시스템은 경로 계획의 신속성과 비행 제어 안정성을 최우선으로 고려해야 하며, 이러한 관점에서 3D Mesh 모델이 운용 전(Pre-flight) 경로 계획을 위한 효율적이고 안정적인 3차원 장애물 지도를 제공하는 것으로 판단된다. 반면, 3D GS 모델은 느린 탐색 시간에도 불구하고 미세 구조에 대한 높은 환경 표현력을 제공하므로, 센티미터 단위의 정밀 회피가 요구되는 초정밀 응용 분야에 적합한 모델로 활용될 수 있다.
다만, 본 연구는 단일 지역(세명대학교 캠퍼스)에 한정된 실험을 수행하였기 때문에 모델링 기법의 일반화 성능을 확정적으로 판단하기 어렵다. 향후 연구에서는 다양한 지형·건물 구조를 포함한 복수의 데이터셋 적용을 통해 결과의 신뢰성과 확장성을 강화할 필요가 있으며, 최적의 3D Mesh, 3D GS 기법을 적용하여 경로 탐색 효율성을 비교 분석하는 연구로 확장할 필요가 있다.
