

1. 서 론
2. 시험평가방법
2.1. 상대거리 이론 수식
2.2. 시험시나리오
3. 실차시험
3.1. 실차시험 차량
3.2. 실차시험 장소
3.3. 실차시험 조건
4. 시험결과 비교분석
4.1. 실차시험 결과
4.2. 이론식과 실차시험 결과의 비교분석
5. 결 론
1. 서 론
최근 자동차 산업은 뉴 노멀시대 진입, 기후 변화 이슈 및 ICT(Information and Communications Technology) 기술 발전으로 촉발된 4차 산업혁명 이슈가 내연기관 중심의 자동차 산업에 큰 변화를 주어, 빠르게 성장해왔던 세계 자동차 시장의 양적 성장이 2015년 이후 서서히 둔화되고 있다.
또한, 인공지능 및 정보통신 등 IT(Information Technology) 기술발전으로 교통사고 방지 및 운전자 피로를 감소시키기 위한 보조기능을 수행하는 첨단 운전자 보조 시스템(Advanced Driver Assistance System, ADAS)를 넘어 자율주행기술까지 발전할 것으로 예상하고 있다.
이러한 정보통신의 발전 등의 영향으로 자동차 산업은 패러다임 전환기에 있으며 그 변화는 C(connected), A(Autonomous), S(Shared), E(Electric)로 요약할 수 있다.
자율주행자동차는 대한민국 자동차관리법 제2조 1호의 3의 정의규정에 따르면 운전자 또는 승객의 조작 없이 자동차 스스로 운행이 가능한 자동차를 의미한다.(1) 세계보건기구(World Health Organization)에서 발표한 ‘GLOBAL SATATUS REPORT ON ROAD SAFETY 2018’ 보고서에 따르면 연간 교통사고 사상자가 135만 명이며 졸음, 전방주시 태만 등 운전자 과실로 발생하는 교통사고가 90%이상이다.(2) 자율주행자동차는 운전자 과실로 발생하는 교통사고를 줄여 안전증가와 교통정체를 완화시킬 것으로 기대하고 있다.
자율주행자동차의 기술은 미국자동차기술학회(Society of Automotive Engineers, SAE)에서 발표한 SAE J3016에 따르면 0단계에서 5단계까지 운전자의 개입여부와 자동화 수준에 따라 총 6단계로 정의하여 구분하고 있다.(3) 단계의 구분은 미국, 일본, 유럽연합(EU) 등 각국의 정부에 영향을 주고 있다.
이러한 자율주행 기술의 0단계는 비자동화 단계, 1~2단계는 운전자 지원 단계, 3~5단계는 자동화 단계로 구분되고, 0~2단계 기능인 ADAS의 장착증대 영향으로 교통사고의 감소로 이어지고 있다.(4) 예시는 적응형 순항제어(Adaptive Cruise Control, ACC), 긴급제동시스템(Autonomous Emergency Braking, AEB), 차선유지시스템(Lane Keeping Assist System, LKAS) 등이 있다. 3단계부터는 자동화 단계이며 운전의 주체가 운전자가 아닌 시스템이다. 3단계는 조건부 자동화 단계로 고속도로와 같은 특정 조건에서 시스템이 주행하며 위험시 운전자가 개입하는 단계이다. 4, 5단계는 운전자 개입 여부로 구분되며, 4단계는 비상시 운전자가 직접 운전이 가능 하지만, 5단계는 운전대가 없는 무인자동차이다.
이러한 자율주행자동차에 대한 안전성 확보는 중요하다. 안전성 평가를 위한 연구동향을 살펴보면, Zheng 등은 자율주행자동차의 자율성의 평가를 위해 새로이 개발한 지표를(안전성, 부드러움, 선명도, 스마트) 기반의 최적화 모델과 시뮬레이션 테스트 및 어려운 시나리오의 신속한 생성에 대한 연구를 진행하였고,(4) Reitz 등은 자율주행자동차 시스템 개발을 지원하기 위해 다년간 수행한 반복 테스트 및 평가에 대한 사례 연구를 제공하였다.(5) Park 등은 자율주행자동차의 센서 및 장치를 위한 다중 이벤트 기반의 시뮬레이션 시나리오 생성에 대한 접근 방식에 대해 연구를 진행하였다.(6) Christopher 등은 자율주행자동차의 검증을 위한 추상 시뮬레이션 시나리오 생성에 대한 연구를 진행하였고,(7) Chai 등은 커넥티드카 및 자율주행자동차의 동역학적 시나리오를 위한 기본 시뮬레이션 환경을 제안하였다.(8) Tim 등은 다중 차량 시나리오를 생성할 수 있는 오픈 소스 그래픽 사용자 인터페이스를 제안하였고,(9) Tuncail 등은 머신 러닝 구성요로를 사용하여 자율주행자동차를 위한 시뮬레이션 기반의 테스트 시나리오를 자동으로 식별하는 방법에 대해 연구하였고,(10) Lima 등은 새로운 테스트 트랙 제안에 초점을 맞춘 자율주행자동차의 글로벌 시나리오, 브라질 교통 시스템과 인증 및 승인 프로세스에 대해 논의 하였다.(11) Whlschke 등은 테스트 케이스 도출을 목표로 연구를 진행하였고,(12) Huang 등은 다양한 자율주행자동차의 테스트 접근 방식 합성에 대한 연구를 진행하였으며,(13) Sung 등은 자율주행자동차의 현재 연구동향을 파악하고 자율주행자동차 연구의 기반기술을 핵심기술의 구성인 인식, 판단, 제어 측면에 대해서 연구하였고,(14) Yoon은 자율주행자동차 상용화를 위한 주요 기술적 이슈인 센서 융합 및 제어 시스템, 정밀지도 기반 자율주행맵 기술에 대한 개요와 자율주행자동차의 기술에 대한 동향과 함께 관련 표준화 진행 현황을 파악하였다.(15)
대부분의 자율주행자동차 안전성에 관한 연구동향은 시뮬레이션 기반의 자율주행자동차 평가와 기계학습을 활용한 시나리오 생성, 알고리즘을 이용한 기능 검증에 대한 연구와 통신에 대한 연구이다. 안전성 평가 이론 및 실차시험 기반의 자율주행자동차 평가 방법에 대한 연구는 부족한 실정이다. 따라서 본 연구에서는 자율주행자동차의 안전성 향상과 평가 방법에 대한 연구를 위해 종방향 상대거리 이론 수식과 고정목표에 대한 통합 시나리오를 제안하고, 실차시험으로 비교 검증하여 자율주행자동차의 이론적 평가 방법을 제안하고자 한다.
2. 시험평가방법
2.1. 상대거리 이론 수식
선행연구에서 거리의 함수로 ACC와 AEB 시스템의 평가기준을 제안하여 검증하였다.(16,17) 각 시스템에서 제안한 거리의 함수는 아래와 같다.
ACC 차량의 속도와 거리를 제어하기 위하여 레이더 센서를 사용하여 측정한 차량의 속도와 거리 정보를 이용한 목표 상대거리 식은 아래와 같다.
여기서, ddes는 목표 상대거리, d0는 정지시 차간거리, τ는 시간 차, vf는 목표차량의 속도이다.
또한, ACC 기능의 Stop&Go의 기능에는 감가속도를 이용하여 앞차와의 상대거기를 조절한다. ACC의 목표 감가속도 식은 (2)와 같다.
여기서, ades는 목표 가속도, k1는 게인, vs제어 차량의 속도이다.
식 (1)과 (2)를 이용하면 식 (3)과 같이 표현이 가능하다. 식 (3)은 선행연구에서 제안한 목표거리 수식이다.(16)
식 (3)의 게인은 0 또는 -1의 값으로 식 (3)을 정리하면 식 (4)와 같이 정리할 수 있다.
여기서, asv는 ades, vs는 vsv, vtv는 vf이다.
AEB는 일반적으로 TTC(Time to Collision)로 제어를 한다. TTC를 강화한 ETTC(Enhanced Time to Collision)가 TTC와 같다는 가정을 하여, AEB의 거리 이론식을 제안하였다.(17)
여기서, vTV는 목표차량의 평균속도, vSV는 대상차량의 평균속도, aTV는 목표차량의 가속도, aSV는 대상차량의 가속도, xc는 상대거리이다.
따라서, 식 (4)와 (7)을 통합하여 자율주행자동차의 종방향 상대거리를 활용한 안전성 평가 이론식을 식 (8)과 같이 제안한다.
여기서 Arelative는 atv-asv, Vrelative는 vtv-vsv이다.
통합이론수식인 식 (8)은 가속도 ±3m/s2을 기준으로 식 (4)와 식 (7)을 사용한다.
2.2. 시험시나리오
자율주행자동차의 고정목표에 대한 시험방법의 제안을 위하여 연속적인 시나리오를 구성하여 아래와 같이 제안한다.
Fig. 1은 자율주행자동차의 고정목표에 대한 반응을 볼 수 있는 시나리오로, 직선도로 추종 시나리오, 긴급제동 오작동 평가 시나리오, 교차로 시나리오(좌회전, 우회전), 제동&회피 시나리오, 차선변경 시나리오, 표지판 인식 시나리오를 통합하여 구성하였다.
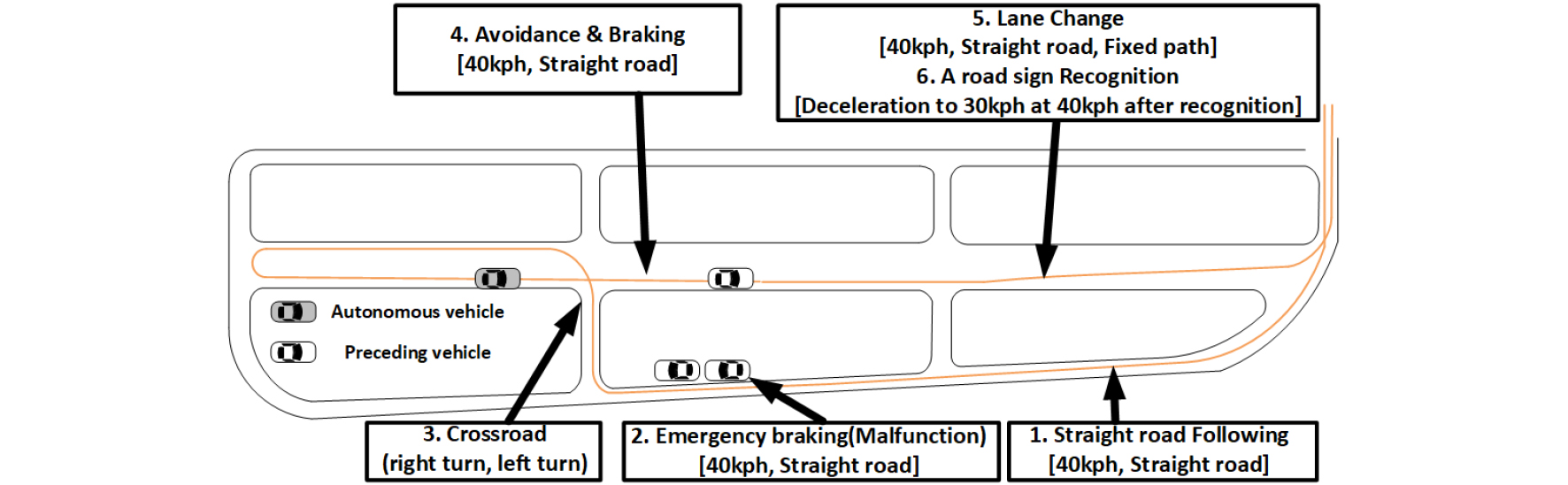
고정목표에 대한 시험 시나리오의 실차 시험 최대 속도는 구글 등의 기업에서 만든 자율주행자동차의 실도로 주행 제한속도인 40km/h와 동일하게 설정을 하였다. 상세시나리오의 설명은 아래와 같다.
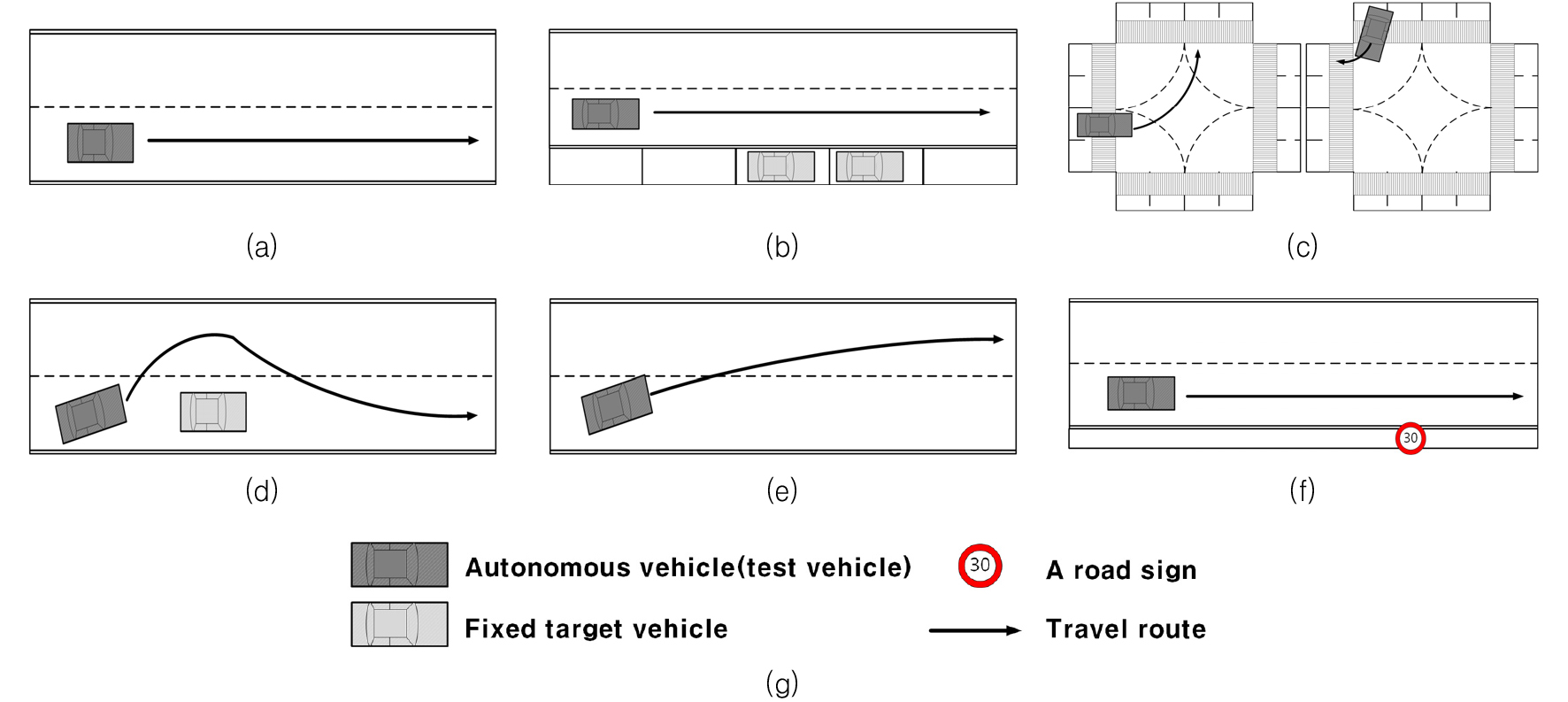
Fig. 2는 고정목표 시나리오를 각각 상세하게 나타낸 것이다. Fig. 2의 (a)는 자차선 추종 시나리오이며, 직선도로와 곡선도로에서 각각 진행하여야 한다. Fig. 2의 (b)는 긴급제동 오작동 평가 시나리오는 옆 차선에 정차되어있는 차량을 인식하고 오작동유무를 판단하는 시나리오이다. Fig. 2의 (c)는 교차로 시나리오(좌회전, 우회전)로 신호를 읽고 안전하게 교차로를 통과하는 시나리오이다. Fig. 2의 (d)는 제동&회피 시나리오로 긴급제동이 아닌 일정 거리에서 장애물을 인지 후 감속하여 회피 또는 정지하는 시나리오이다. Fig. 2의 (e)는 차선변경 시나리오로 직선도로에서 정해진 경로를 통해 차선을 변경하는 시나리오이다. Fig. 2의 (f)는 표지판 인식 시나리오로 30km/h의 표지판을 인식하여 표지판 제한속도로 감속하는 시나리오를 구성, 제안하였다.
3. 실차시험
3.1. 실차시험 차량
실차시험에 사용된 차량은 총 3대이며, Fig. 3(a)와 같이 H사의 아반떼 AD 기반의 자율주행자동차와 고정목표는 Fig. 3(b)인 H사의 아이오닉 EV와 R사의 QM6를 활용하였다.

자율주행자동차의 사양은 Table 1에 나타내었고, 고정목표로 활용한 자동차의 사양은 Table 2에 나타내었다.
Table 1.
Autonomous vehicle specification
Table 2.
Fixed Target specification
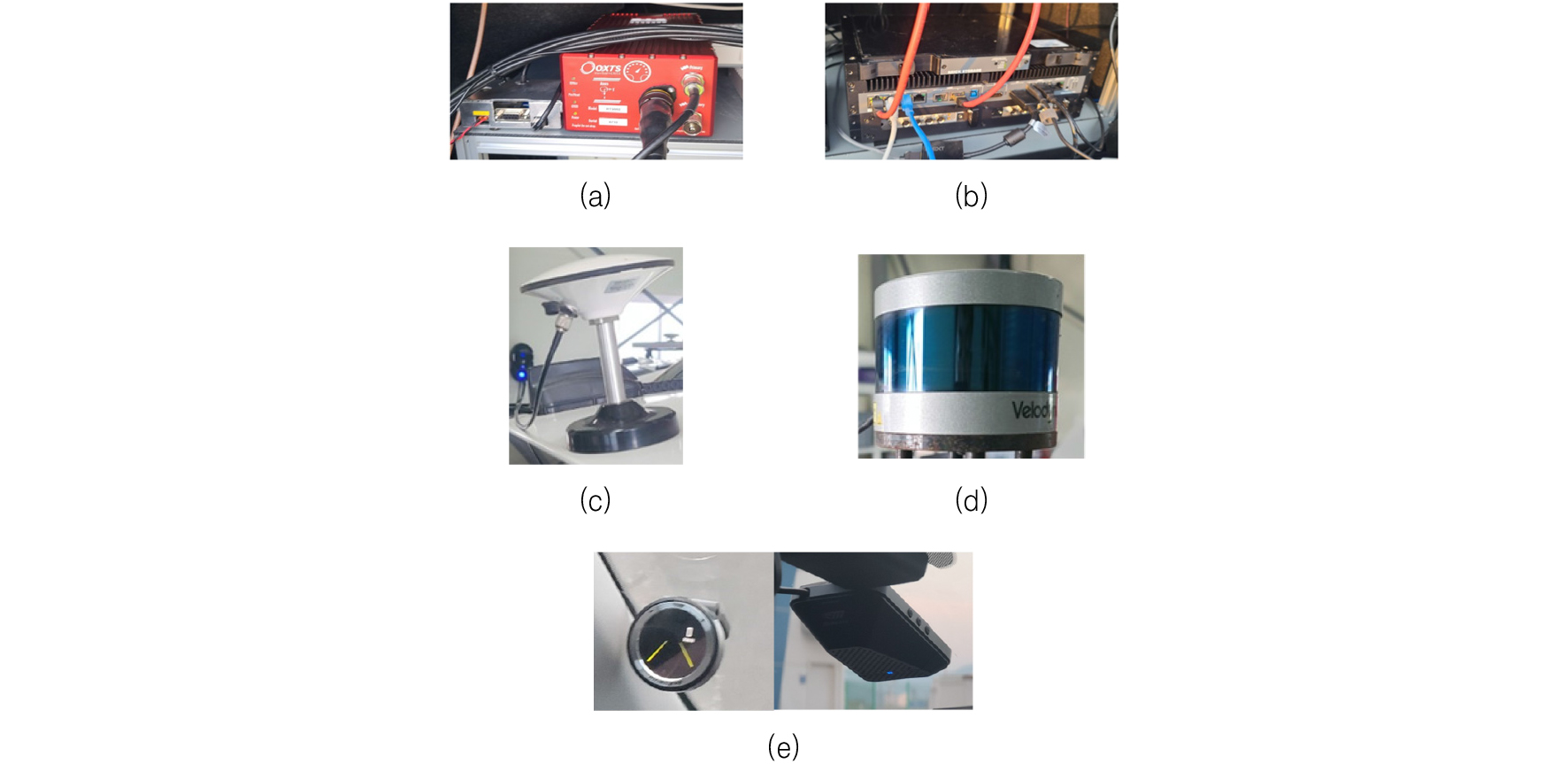
실차시험에 사용한 자율주행자동차는 Fig. 4에 나타낸 DGPS, 카메라, 라이다, CAN 통신장비 등의 장비를 장착하였으며, 사양은 Table 3에 나타내었다.
Table 3.
Test equipment specification
3.2. 실차시험 장소
실차시험은 지능형자동차부품진흥원의 자율주행시험로를 선정하였으며 Fig. 5에 나타내었다. 선정 이유는 실제 도로의 마찰계수, 도로 폭 등이 적용되어 있어 시험장소에 적합하다고 판단하였고, STANLEY LONDON社의 ‘skid-resistance’를 사용하여 노면의 평균 마찰계수가 1.08임을 확인하였다.

3.3. 실차시험 조건
객관적인 데이터 취득을 위해서는 시험 시나리오가 동일하게 반복 재현되어야 한다. 그에 따라, 실차시험을 진행하는 인원과 시험 장비 등을 동일하게 유지하였고, 동일한 환경 조건에서 3회 반복하였다. Table 4에 정리한 시험환경조건에서 진행하였으며, 소나기와 같은 날씨의 변동사항은 없었다.
4. 시험결과 비교분석
4.1. 실차시험 결과
실차시험 결과는 Fig. 6~9과 같으며, 제안한 고정목표 시험 시나리오를 기반으로 4가지 종류의 시험을 3회 반복하였다.
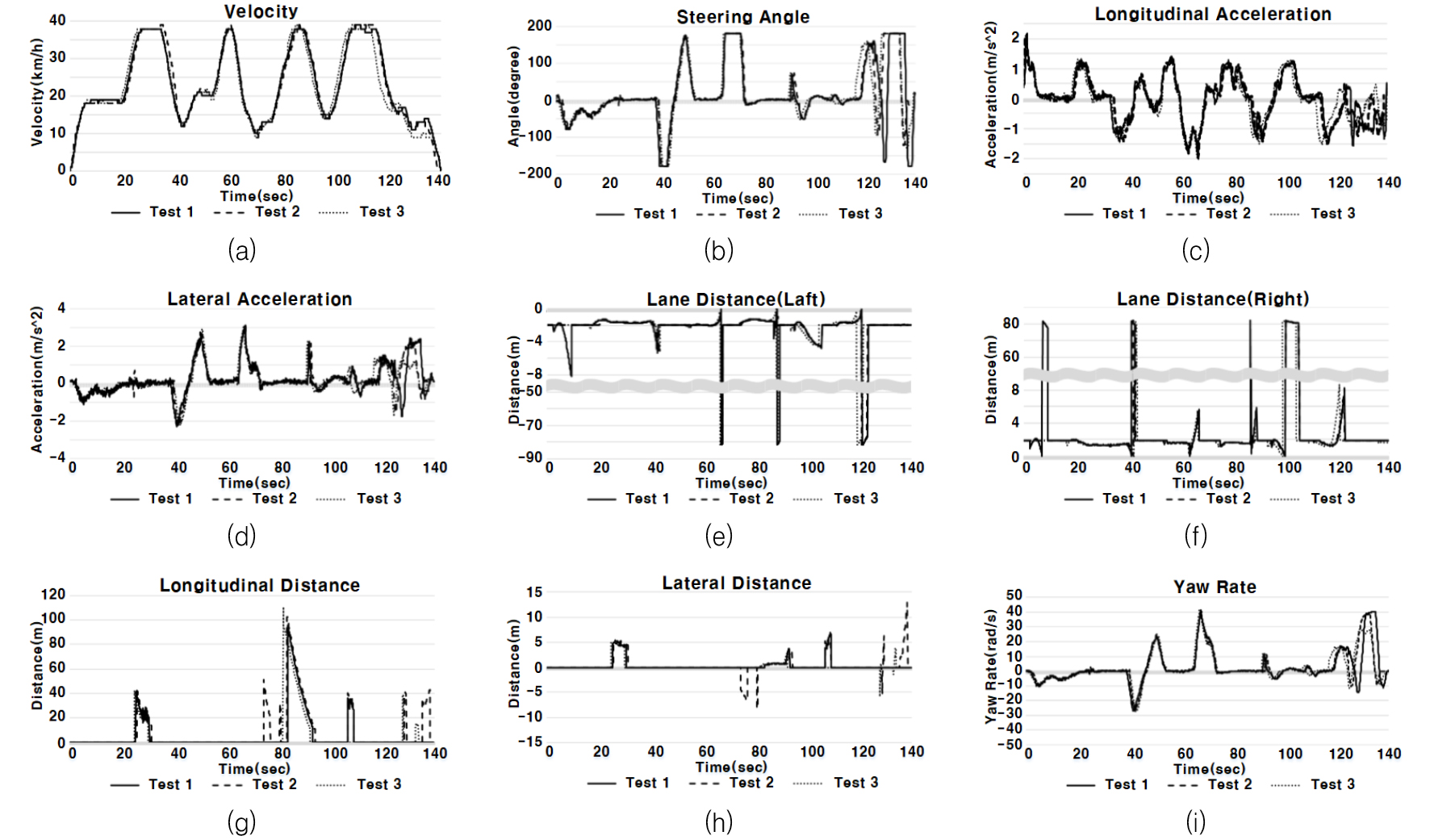
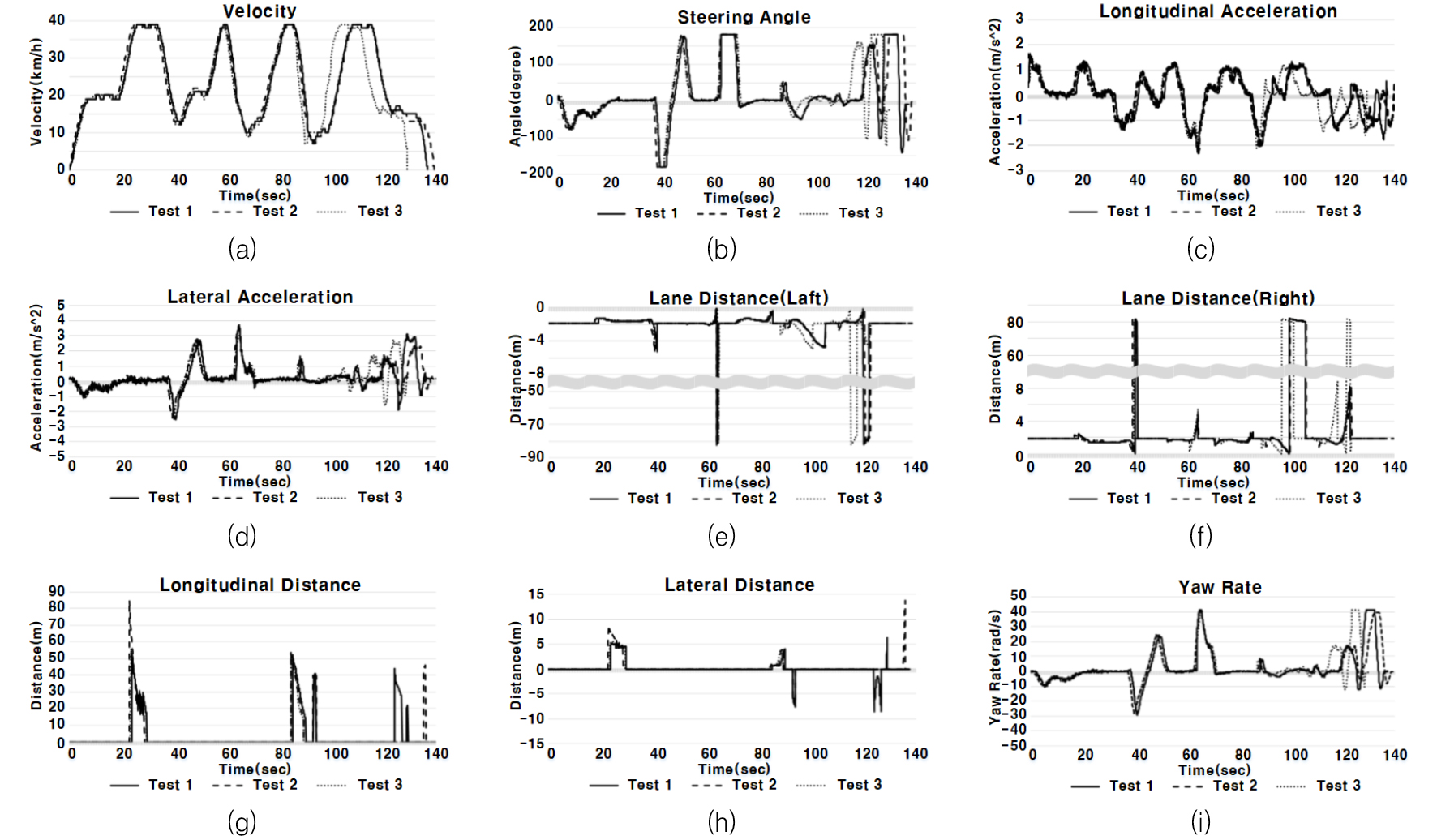
첫 번째 시험은 Fig. 1의 시나리오에서 표지판 인식을 제외한 것으로 상세시나리오 1~5를 통합하여 실차시험을 진행한 결과는 Fig. 6이다.
Fig. 6을 참고하면, 약 0~25초는 직선도로 추종 구간으로 가속하는 것을 확인할 수 있다. 약 25~35초구간은 긴급제동 오작동 시나리오 구간으로 오작동 없이 통과하는 것을 확인하였으며, 약 30~45초는 우회전 구간에서 감속 및 우회전을 진행하였다. 약 45~55초는 좌회전을 진행하여 2차로로 진입하였고, 약 55~75초는 좌회전 완료 후 유턴까지 진행을 하였다. 약 75~100초는 멀리서 고정목표를 인지 후 천천히 감속하여 회피 후 본 차선으로 복귀하였다. 약 100~115초는 가속 후 시나리오 차선변경을 하고 시나리오 종료를 위해 감속하고, 약 115초 이후는 시나리오를 종료하였다.
두 번째 시험은 장애물 회피시 첫 번째 시험보다 느리게 제동하며 회피하는 것으로 상세시나리오 1,2,3,5와 첫 번째 시험의 상세시나리오 4에 대한 자율주행자동차의 회피기능을 천천히 진행하는 시나리오를 통합하여 실차시험을 진행한 결과는 Fig. 7이다.
Fig. 7을 참고하면, Fig. 6의 첫 번째 시험 결과와 유사한 경향을 가지는 것을 확인할 수 있으나, 약 75~100초에서 고정목표를 인지 후 감속하여 회피 후 본 차선으로 복귀하는 과정의 제동속도와 종 방향 감속도, 회피시 상대거리 등의 차이가 있는 것을 확인 할 수 있다.
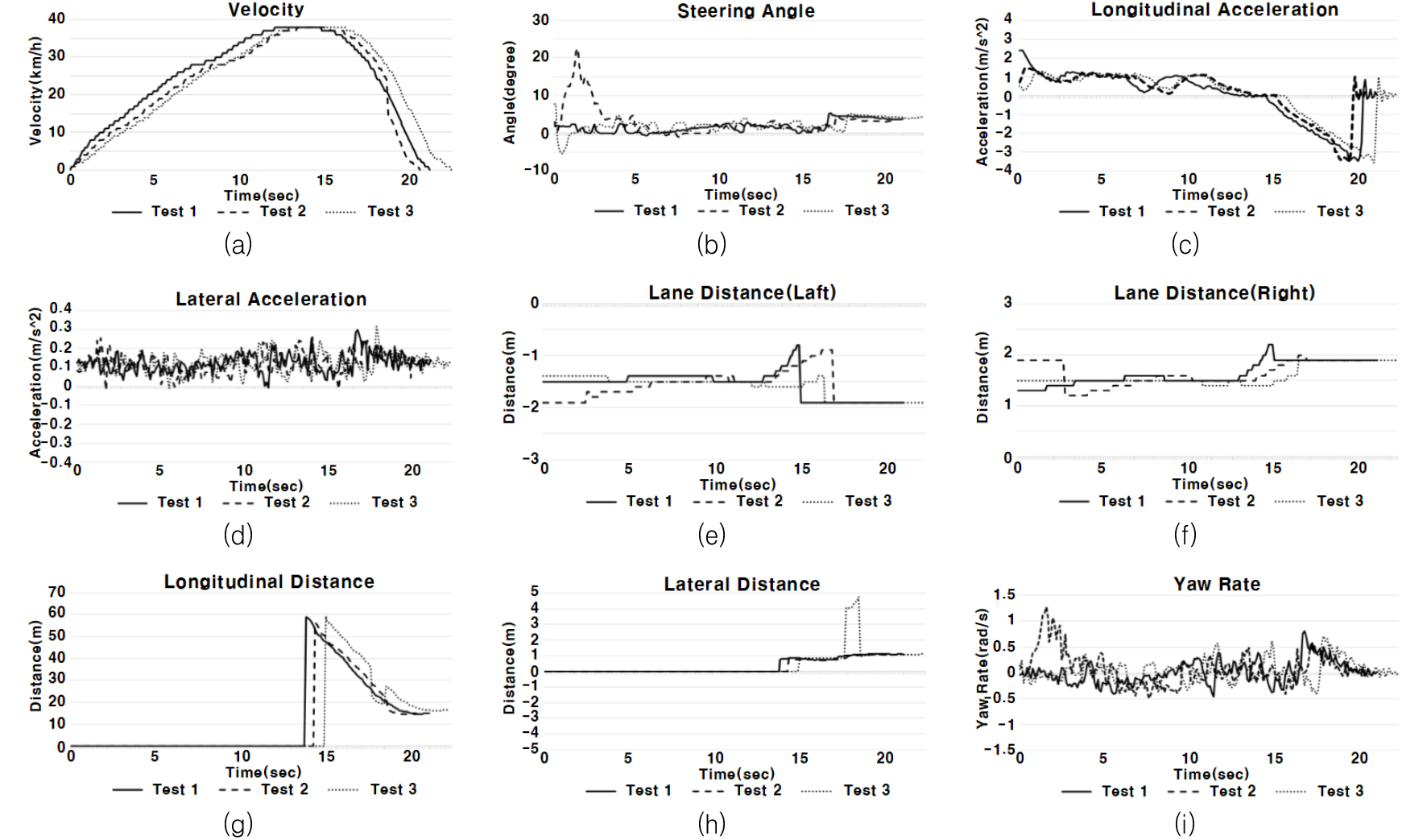
세 번째 시험은 직선도로에서 고정목표를 인지하고 제동하는 것이다. 상세시나리오 4에서 회피를 하지않고 제동한 실차시험 결과는 Fig. 8이다.
Fig. 8을 참고하면, 약 0~25초는 직선도로에서 가속하는 중 멀리서 고정목표를 인지 후 천천히 감속하여 정차하였다.
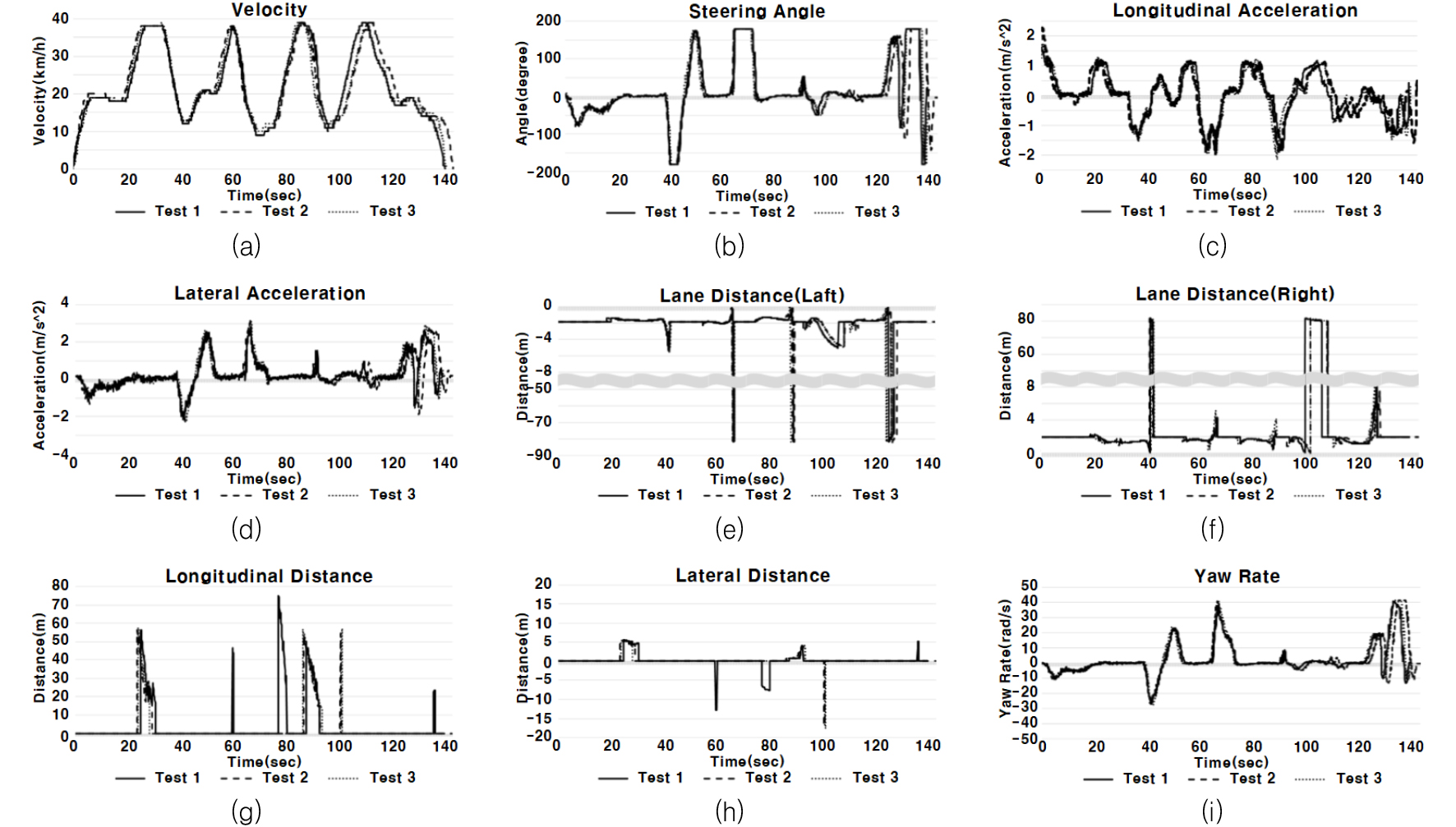
네 번째 시험은 Fig. 1의 시나리오로, 상세시나리오 1~6을 통합하여 실차시험을 진행한 결과는 Fig. 9이다.
Fig. 9를 참고하면, Fig. 6의 첫 번째 시험 결과와 유사한 경향을 가지는 것을 확인할 수 있으나, 표지판 유무의 차이로 인해 약 110~120초 사이에서 속도와 종 방향 감속도, 회피시 상대거리 등의 차이가 있는 것을 확인 할 수 있다.
4가지 시험 모두 3회 반복하였고 각 시험의 결과는 유사하였으나 자율주행자동차가 시나리오 시작시의 가속과 유턴을 진행하는 시간 차이 등으로 인해 차이가 있는 것으로 파악된다.
첫 번째, 두 번째, 네 번째 시험의 고정목표에 대한 자율주행자동차의 회피 시 상대거리와 세 번째 시험의 실측 제동 완료 상대거리는 Table 5에 정리하였다.
Table 5.
Comparative analysis of results
4.2. 이론식과 실차시험 결과의 비교분석
Table 5는 이론식을 활용하여 고정목표의 회피시 상대거리에 대한 계산 값과 실차시험 결과 값을 비교한 오차율을 나타내었다.
회피시의 이론 상대거리 대비 실차시험 결과 값의 오차율은 첫 번째 시험의 2회차에서 최소 오차율은 0.484%, 네 번째 시험의 2회차에서 최대 오차율은 7.391%로 나타났다.
Fig. 6, 7, 9의 (e), (f)는 차선까지의 거리로, 교차로에서 측정결과가 발산되는 것과 회피시의 차선까지의 평균 거리 결과(약 3.28m)와 실측한 차선폭(3.15m)을 비교한 결과 약 13cm의 오차가 있는 것을 확인하였다.
Fig. 8의 (e), (f)는 차선까지의 거리이며 교차로에서 값이 변화하는 것을 확인하였다.
차선까지의 거리는 교차로에서 직선 차선이 없어 발산되는 것으로 판단하였고, 측정 오차는 카메라의 차선 인식과 햇빛에 반사된 차선 등의 문제로 판단하였다. 그리고 세 번째 시험의 교차로에서 값이 발산하지 않고 변화하는 것은 다른 시험 대비 교차로를 통과하는 시점의 속도가 높았기 때문으로 판단하였다.
Fig. 6, 7, 9의 (g), (h)는 종방향과 횡방향의 장애물까지의 상대거리이며, 약 25~35초, 약 75~100초를 제외하고, 다른 장애물들(가로등 등)도 인식하여 반응된 것을 확인하였다. Fig. 6, 7, 9의 (c)는 종방향 감속도로 회피시 첫 번째 시험의 감속도가 두 번째, 네 번째 시험의 감속도가 낮은 이유는 고정목표를 먼저 인식한 것으로 파악하였다.
Fig. 8의 (g), (h)는 종방향과 횡방향의 장애물까지의 상대거리이다. 고정목표를 인지하고 감속하여 제동한 것을 확인하였다. 또한, Fig. 8의 (c)는 종방향 감속도로 다른 시험 대비 결과 값이 큰 이유는 회피가 아닌 제동으로 인한 것으로 파악하였다.
이러한 오차는 동일한 시나리오를 진행하였음에도 불구하고, 시나리오의 진행방법, 시험로의 상태, 햇빛과 같은 날씨에 의해 센서의 인식 등에 따른 오차로 판단하였다.
5. 결 론
본 연구에서는 고정목표에 대한 자율주행자동차의 시험방법을 위해 종방향 거리 이론식과 연속적인 시험 시나리오를 제안하였다. 그리고 실차시험으로 이론값과 실측값의 오차율을 비교분석하여 제안한 시나리오에 대한 종방향 거리 이론식의 활용 가능성을 검증하였다. 결과를 정리하면 아래와 같다.
1) 고정목표에 대한 자율주행자동차의 안전성 평가 시나리오는 구글의 자율주행자동차속도인 40km/h 기반의 직선도로 추종, 긴급제동 오작동 평가, 교차로(좌회전, 우회전), 제동&회피, 차선변경, 표지판 인식 등의 시나리오를 연속적으로 진행가능하게 통합하여 제안하였다.
2) 선행연구에서 제안한 종방향 거리의 함수를 고정목표와의 거리에 대한 자율주행자동차의 활용 가능성을 확인하였다.
3) 제안한 시나리오와 이론식에 대한 검증을 위해 동일한 인원 및 장비를 활용하여 3회 반복 시험을 진행하였으며, 지능형자동차부품진흥원의 자율주행시험로를 이용하였다.
4) 시나리오 시험결과는 이론 값 대비, 첫 번째 시험의 2회차에서 최소 오차율은 0.484%, 네 번째 시험의 2회차에서 최대 오차율은 7.391%로 나타났다.
5) 첫 번째, 두 번째, 네 번째 시험의 결과를 보면 교차로에서 차선까지의 거리가 발산되었고, 세 번째 시나리오 결과는 교차로에서 차선까지의 거리가 변화하였다. 차선까지의 거리는 교차로에서 차선이 없어 발산되는 것으로 판단하였고, 측정 오차는 자율주행자동차에 장착된 센서의 차선 인식과 햇빛에 반사된 차선 등의 문제로 판단하였다. 그리고 세 번째 시험의 교차로에서 값이 발산하지 않고 변화하는 것은 다른 시험 대비 교차로를 통과하는 시점의 속도가 높았기 때문으로 판단된다.
6) 첫 번째, 두 번째, 네 번째 시험의 상대거리 결과는 고정목표 이외에도 가로등과 같은 다른 장애물을 인식하여 결과 그래프에 반영된 것을 확인하였다. 세 번째 시나리오의 상대거리는 고정목표를 인지하고 감속하여 제동한 것을 확인할 수 있다.
7) 0.484%~7.391%의 오차는 시나리오의 시험 진행 방법, 시험로의 상태, 햇빛과 같은 날씨에 의해 센서의 인식 등에 따른 오차이며, 8%이내 오차범위로 제안이론식의 신뢰성이 있다고 판단하였다.
따라서, 자율주행자동차 평가시 사용하는 라이더, 레이더, DGPS 등의 고가의 장비와 전문가가 필요하는 등 비용과 시간의 부담이 큰 단점이 있으나, 제안한 이론수식을 활용하면, 개발 단계에서 종방향에 대한 경향을 파악 할 수 있어 실차시험이 불가능한 환경에서의 안전성 평가 방법으로 활용이 가능하다고 판단된다.
본 연구에서는 자율주행자동차의 안전성 평가를 위한 이론식과 실차시험을 통해 고정목표에 대한 시나리오를 제안하고 이의 검증을 위하여 비교 검증하였다. 향후 Moving Target에 대한 시험을 실시할 예정이다.
