

1. 서 론
2. 국내 정면 충돌 실사고
2.1. 정면 충돌 사고 데이터 추출
2.2. 정면 충돌 사고 세부 유형
3. AEB(Autonomous Emergency Braking) System 차량 모델링
3.1. 이전 연구 AEB 모델
3.2. 가상의 AEB 모델링
4. 사고재구성
4.1. LTAP-OD 사고재구성
4.2. LTAP-OD 대표 사고
5. 결 론
1. 서 론
전 세계적으로 인구가 매년 1.1% 증가함과 동시에 차량 역시 그 수가 매년 증가하고 있다. 국내 자동차 시장도 세계 차량 수가 증가함과 같이 2022년 2분기 차량 누적 등록 대수는 전 분기 대비 0.6% 증가했다고 발표하였다.(1) 인구수와 차량 증가로 인하여 도로 정체는 물론 충돌사고 역시 빈도가 더욱 증가할 것이라 예측된다. 교통사고 분석 시스템인 TAAS(Traffic Accident Analysis System)에 따르면 2020년 기준, 우리나라 교통사고의 총 비용은 약 2조 6천억원에 달한다고 발표하였으며,(2) 개인별 경제적 손실을 야기하고 있다. 그로 인하여 국내는 물론 해외에서도 차량 기능 안전 및 충돌사고 시나리오 연구가 활발하게 진행 중이다.
유럽연합인 EU에서는 유럽 도로에 모든 교통사고는 90% 이상 운전자의 과실로 보고하였으며,(3) 현재 도로상의 운행 중인 모든 차량이 자율주행차량으로 대체된다면 사고 위험은 크게 줄어들 것이라고 예측하였다.(4) 이에 따라 EU 연합에서는 OSSCAR 프로젝트를 진행하였다. OSSCAR(3)는 총 8개국 21개의 기관이 참여하여 자율주행차량의 사고 예측 연구를 진행하고, GIDAS,(5) IGLAD(6) 등의 교통사고 데이터베이스를 통해 사고 유형별 발생 심도와 빈도를 분석하여 자율주행 기능 반영 시, 사고 유형별 감소 여부를 추정한다. 또한, 자율주행차량에 사고 발생 시 탑승자의 착석 상태별 상해에 대한 잠재적인 위험성을 예측하는 미래 사고 예측 연구가 목표이다. 또한, Sander 외 1명의 연구(7)에서는 교차로 테스트 시나리오를 정의하는 그룹화 방법에 대하여 AEB 차량의 실제 퍼포먼스 평가를 진행하였으며, Marcus Wisch 외 9인의 연구(8)에서는 교차로 2020 프로젝트라 하여 유로 NCAP 테스트 프로토콜 개발을 위한 선행 연구로 교차로 내 자동긴급제동 시스템 테스트를 진행하여 유럽 도로에서 발생하는 도로 교통 사고 해결을 목표로 하고 있다. 국내 역시 자동차 교통사고 심층 분석을 위해 의료기관을 중심으로 자동차 사고 심층 분석 자료 구축을 위한 KIDAS(Korea In-depth Accident Study)를 구축하고 있으며,(9~11) 도로교통공단에서는 교통사고 분석시스템인 TAAS(Traffic Accident Analysis System) 데이터베이스(12)를 운용하고 있다. 그러나 TAAS에서는 차량 사고의 파손 부위, 파손 심도 등은 개인정보로 인하여 제공하지 않고 있다. 그런 사유로 사고재구성 시 차량에 정확한 위치를 확인할 수 없기에 본 연구에서 활용하기에는 어려움이 따르고 있다. 따라서 본 연구에서는 사고 영상이 포함된 국 내 정면충돌 150건의 실사고 데이터를 바탕으로 사고 유형별로 분류하고, 자동 긴급 제동 장치가 적용된 차량으로 기존 실사고를 재구성 시뮬레이션하여 사고 유형별 빈도 및 심도를 분석하였다. 또한, 사고 감소 여부를 추정하여 미래 사고 시나리오 개발의 도움이 되고자 한다.
2. 국내 정면 충돌 실사고
2.1. 정면 충돌 사고 데이터 추출
보험사를 통해서 150건의 정면 충돌사고의 사고리포트를 확보하였으며, 다음과 같이 추출되었다. 사고 조사 기간은 2016년 1월부터 2021년 6월까지 총 5년 6개월에 걸쳐 약 32만 건을 취합한 데이터이다. 32만 건에 데이터의 대상 범위로는 ① 해당 기간 내 발생 및 사고 처리 완료된 건, ② 자동차 보험의 모든 담보 가입 차량일 것, ③ ‘중앙선 침범’, ‘교차로 내 사고’, ‘추돌 사고’, ④ 접수된 피해물이 ‘대물’, ‘자차’ 담보 포함 사고이며 마지막으로 내용적 범위로 보험사 사고 접수 DB 중 피해물과 피해자 조사 DB가 모두 포함된 데이터이다. 위와 같이 사고 조사 기간, 대상 범위, 내용적 범위, 이 3가지의 범위를 모두 만족하는 총 데이터의 양은 약 32만 건이며, 32만 건의 데이터를 심층 데이터로 만들기 위하여 필터링을 진행하였으며, 그 방법은 Table 1과 같다.(13)
Table 1과 같이 7단계에 거쳐 데이터 선별을 진행하게 되며, 최종 1,199건의 사고가 집적된다. 집적된 1,199건의 데이터 중 보험사에서 선출하여 제공받은 데이터는 150건이며, 이 150건의 데이터를 분석하여 정면충돌 사고 형태를 분류하였다.
Table 1.
Filtering conditions for extracting accident data for in-depth analysis of domestic traffic accidents(13)
2.2. 정면 충돌 사고 세부 유형
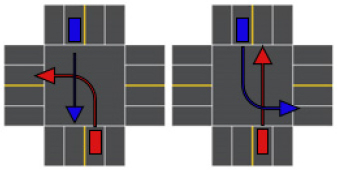
1,199건의 정면충돌 사고 중 보험사를 통해 제공받은 사고 건수는 150건이며, 사고재구성이 불가한 3건의 사고를 제외한 147건의 데이터를 토대로 Fig. 1과 같이 사고 유형별로 분류하였다. 정면충돌 사고 중 가장 많이 발생한 사고는 LTAP-OD(Left Turn Accrosing Path - Opposite Direction)와 중앙선 침범 사고이며 Table 2와 같다. LTAP-OD 사고는 직진하는 차량과 맞은편 차선에서 좌회전하는 차량과 정면충돌하는 사고이다.
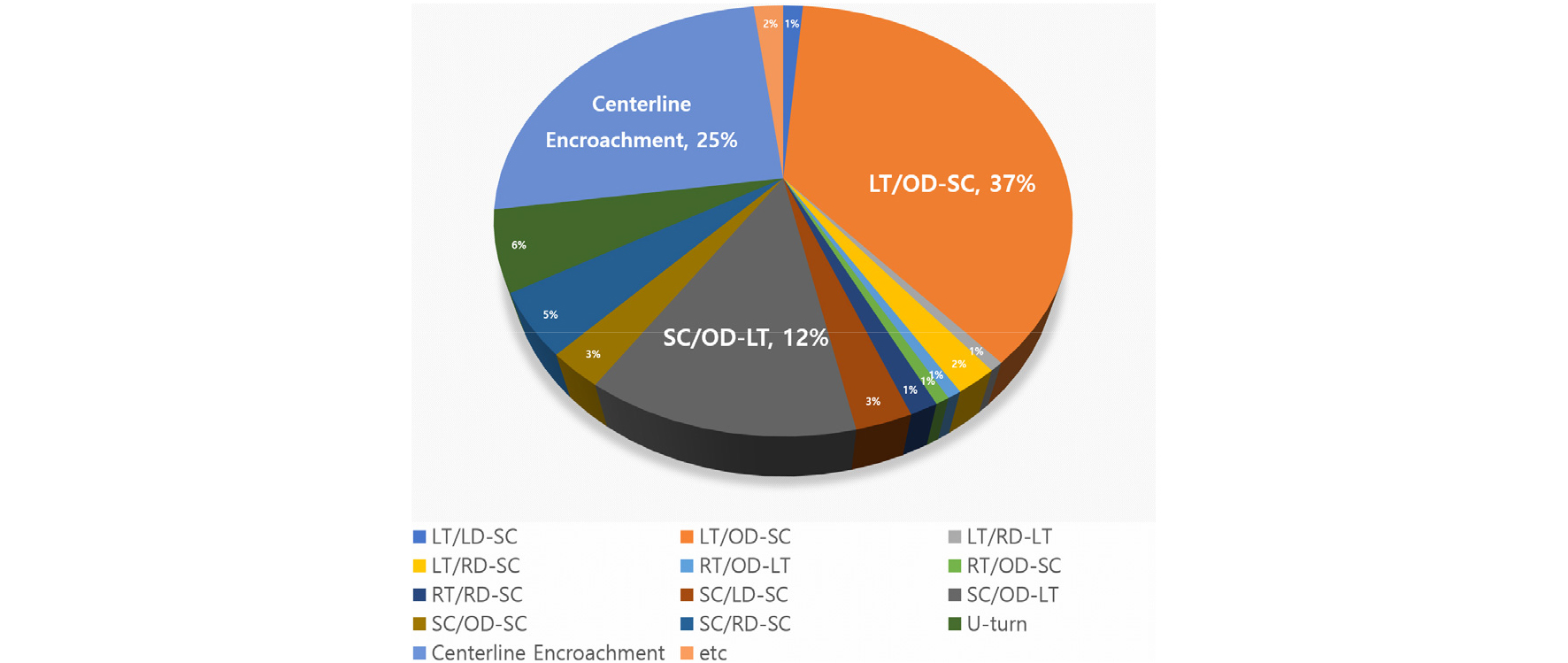
Table 2.
The most common type of head-on collisions in Korea
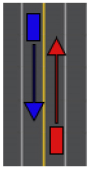
LTAP-OD 사고는 147건의 사고 중 75건인 50% 비율을 차지하고 있다. 중앙선 침범 사고는 중앙선 침범으로 대향 차량과 정면충돌 하는 사고로 38건으로 확인하였으며, 비율은 약 25%를 차지하고 있다. 본 연구에서는 국내 정면충돌 사고 중 가장 많이 발생한 사고인 LTAP-OD 교차로 사고 상황에 대하여 다루고자 한다.
3. AEB(Autonomous Emergency Braking) System 차량 모델링
3.1. 이전 연구 AEB 모델
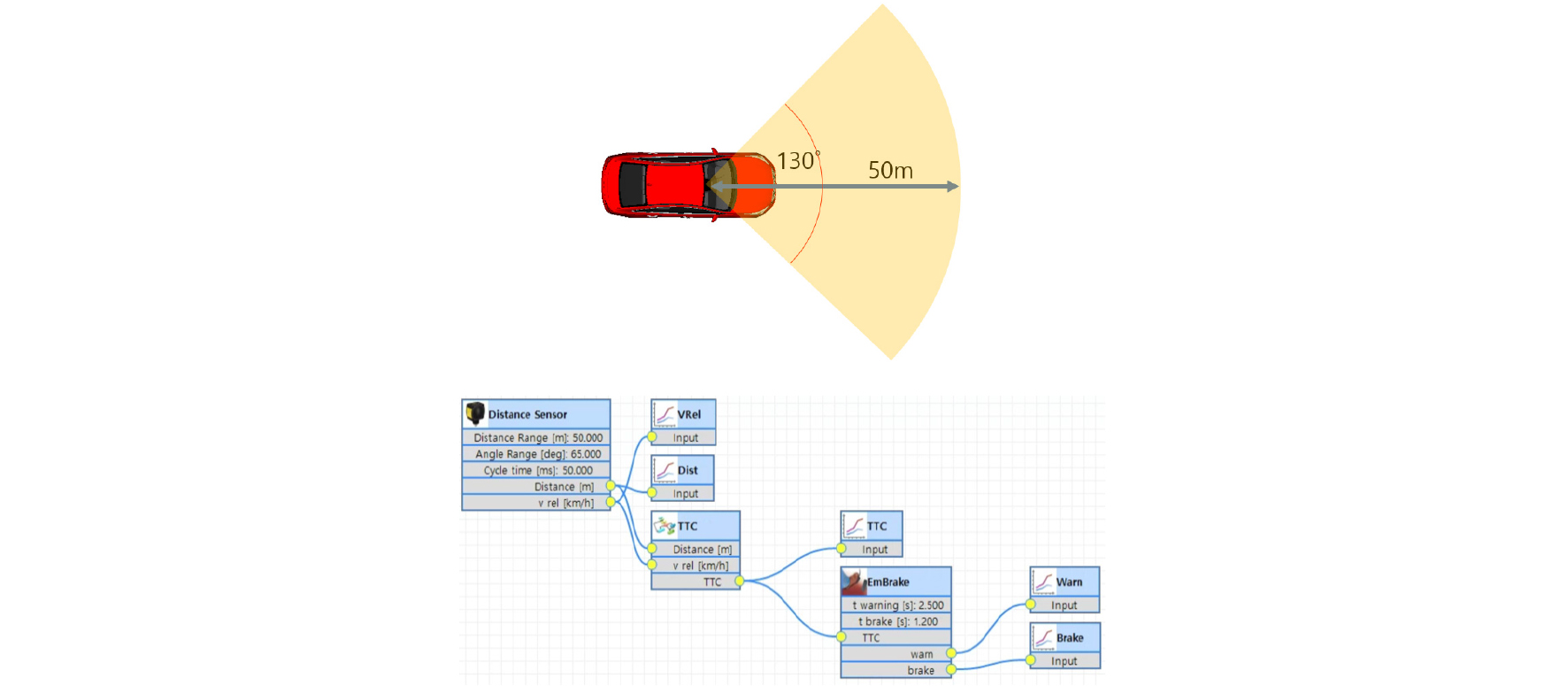
AEB(Autonomous Emergency Braking) System은 첨단 주행보조장치의 일종으로 전방추돌상황이 감지되는 상황에서 운전자가 부주의하거나 반응하지 못한 상황에서 운전자를 대신하여 차량의 브레이크를 밟아 차량의 속도를 감속시켜주는 장치이다. 이전 연구인 OSSCAR(2)에서는 AEB 모델을 Fig. 2, 3과 같이 정의하고 있다. 자율주행차의 기본 능력은 자동 긴급제동장치인 AEB로 정의하며, 자율주행차량은 교통 상황의 제한된 정보로 인하여 회피 조향은 포함하지 않는다. OSSCAR 자율주행차량의 센서 범위와 각도는 최대 200 m, 180°(±90°)이며, 데이터세트는 충돌의 관련된 2대의 차량으로 제한하고 있다. 각 차량의 센서는 한 대의 차량만을 인식 및 식별하며, TTC는 1.2 sec 미만인 경우의 AEB를 활성화한다.

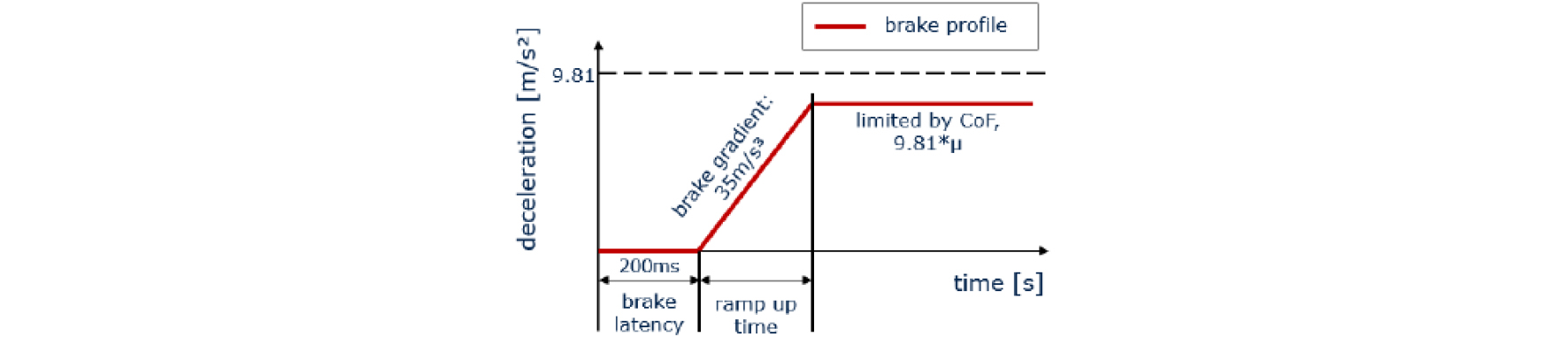
또한, AEB 동작은 200 ms delay를 가진 후 35 m/s3의 감가속도로 감속하며, 최대 감속은 타이어와 노면 사이의 마찰계수인 μ로 주어진다. 대부분의 건조한 도로의 경우 μ = 0.8로 가정하며, 젖은 도로의 경우 μ = 0.7로 가정한다. 따라서 건조한 노면에서는 7.8 m/s2, 젖은 노면에서는 6.9 m/s2 의 최대 제동 감가속도가 주어진다.
3.2. 가상의 AEB 모델링
OSSCAR의 AEB 센서 범위로 시뮬레이션 시 중앙선 넘어 반대차선에서 다가오는 차량까지 인식하여 시뮬레이션 상 오류가 발생하는 문제점 있다. 이를 해결하기 위해 3.2장에서는 OSSCAR 자율주행차량 모델을 참고하여 국내 도로 실정에 맞는 AEB 시뮬레이션 모델을 개발하고, 사고재구성 프로그램인 PC-CRASH를 활용하여 시뮬레이션을 수행하였다.
AEB 모델을 만들기 위해 먼저 센서 범위를 지정하였다. 센서 범위는 현재 양산 차량의 적용 중인 카메라 센서를 참고하였으며, 해당 제품의 사양은 Table 3과 같다.
Table 3.
Camera specification
| System | Operation cycle | 20 fps |
| Initial Buffer | 200 ms | |
| Operation Temperature | -35 ~ 85°C | |
| Camera HW | FOV 100° × 39.3° / Resolution 17 MP | |
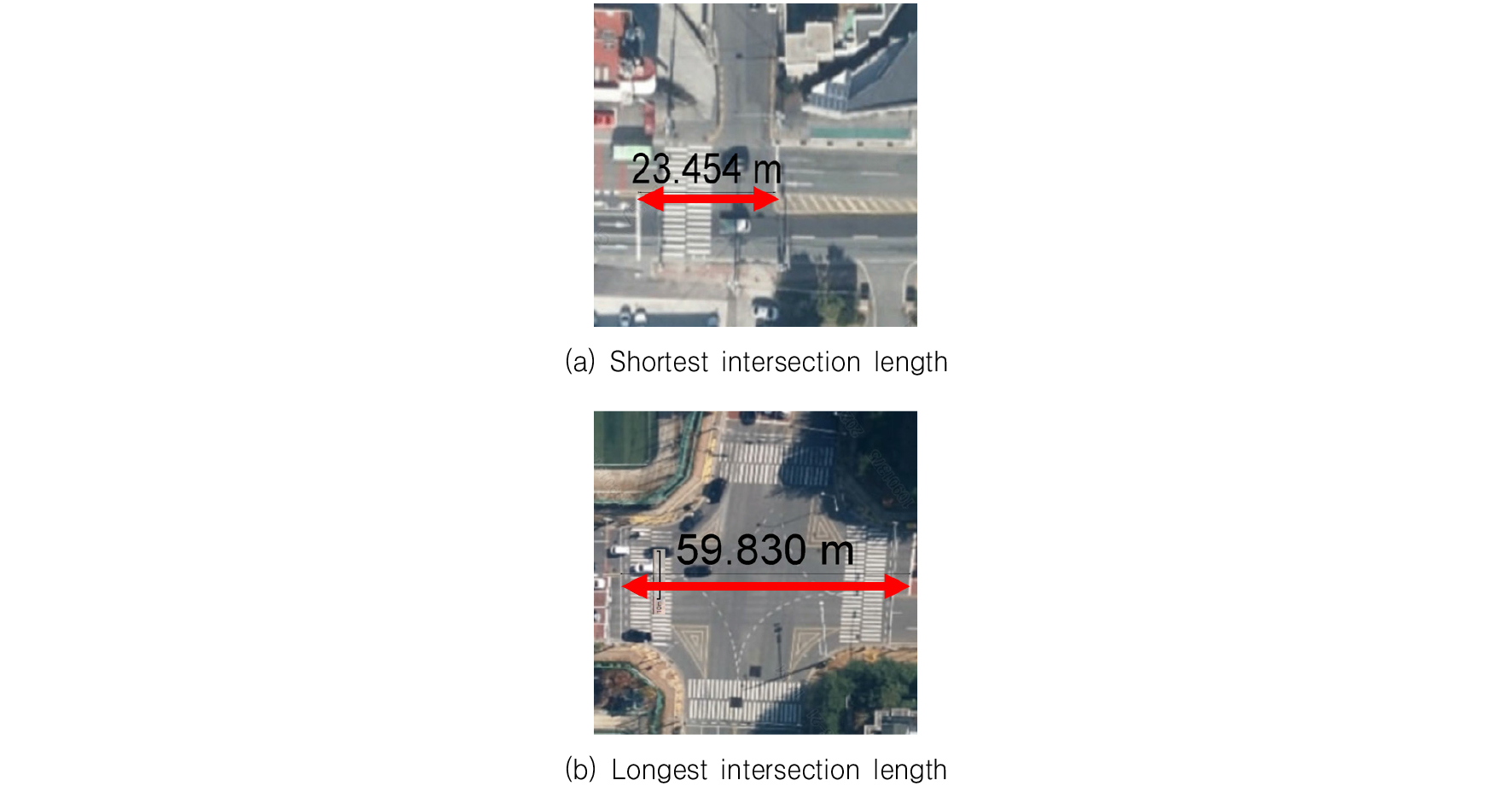
그 외 사고보고서를 바탕으로 교차로 사고의 실제 사고 위치를 위성지도로 확인하여 사고 당시의 평면교차로 크기를 확인하고, 확보한 보험사 사고보고서의 교차로를 전부 커버할 수 있도록 Fig. 4와 같이 센서 범위를 도출하였다. 75건의 교차로의 범위는 직선 중심으로 약 23 m 에서 60 m 까지 였으며, 본 연구에서 활용하는 센서의 범위는 Fig. 5와 같이 최대 50 m, 130°(±65°) 범위를 갖도록 설정하였다. 추가적으로 보험사를 통해 접수받은 사고보고서 내에는 노면의 컨디션이 나타나 있지 않기 때문에 제동력은 건조한 노면 기준으로 7.8 m/s2의 최대 제동 감가속도를 설정하였다.
4. 사고재구성
4.1. LTAP-OD 사고재구성
보험사를 통해 제공받은 국내 정면충돌 150건의 사고 중 50%의 비율을 차지하는 LTAP-OD(Left Turn Acrossing Path - Opponent Direction) 사례의 3.2장에서 설명한 AEB 모델을 적용하여 사고재구성 시뮬레이션을 진행하였다. 사고재구성 시나리오는 3가지 상황을 통해 시뮬레이션을 진행하였으며, 이 3가지 상황은 Table 4와 같다. 첫 번째 상황은 교차로 내에서 AEB가 적용된 좌회전 차량과 마주 오는 직진 차량과의 충돌 상황이며, 두 번째 상황은 AEB가 적용된 직진 차량과 반대 차량은 일반 운전자가 운전하는 상황이며, 마지막으로 세 번째 상황은 양 차량, 모두 AEB가 적용된 차량의 충돌 상황이다.
Table 4.
Scenario configuration of intersection simulation
| Vehicle making a left turn | Vehicle moving straight | |
| Treatment 1 | AEB Vehicle | Normal Vehicle |
| Treatment 2 | Normal Vehicle | AEB Vehicle |
| Treatment 3 | AEB Vehicle | AEB Vehicle |
4.1.1. LTAP-OD 좌회전 차량 AEB 적용 사고재구성
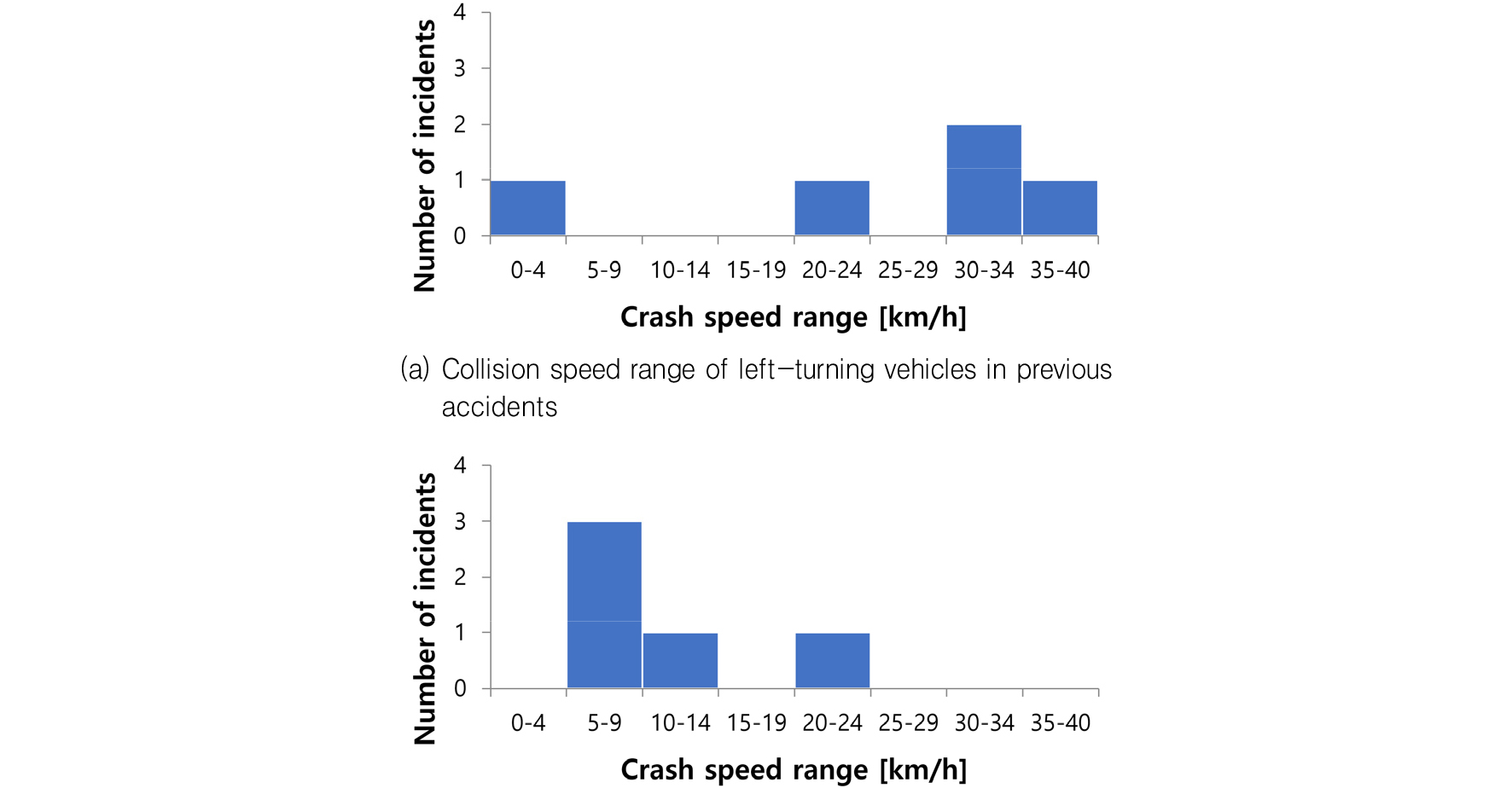
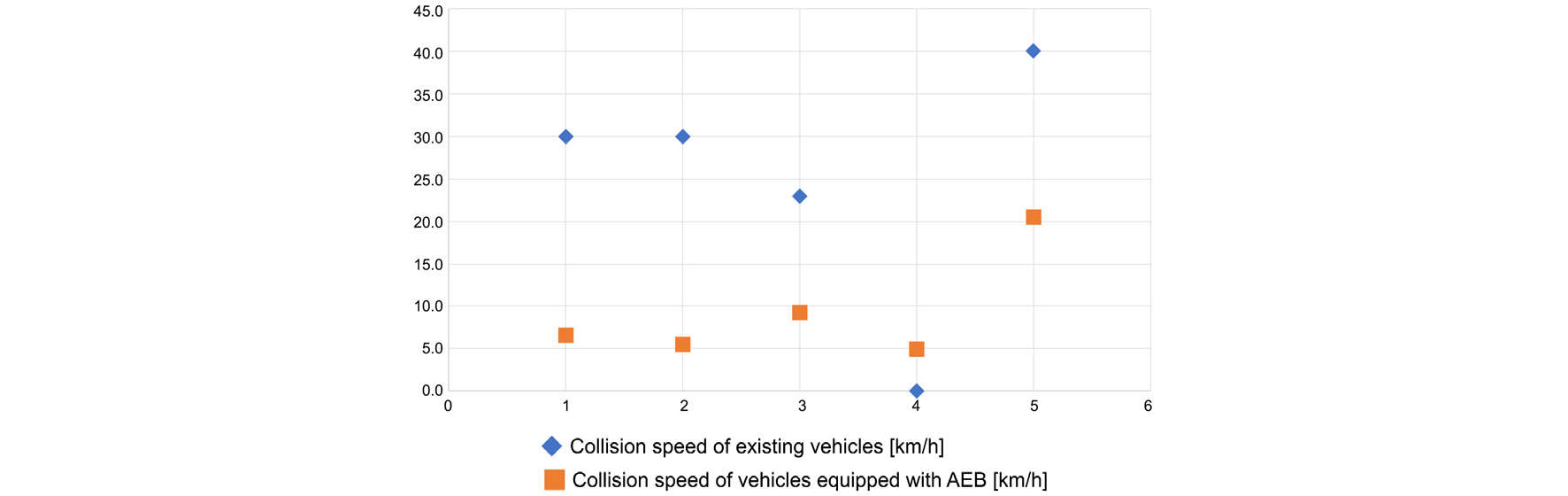
좌회전 차량에 AEB를 적용한 시뮬레이션의 결과는 다음과 같다. 75건의 LTAP-OD 사고 중 좌회전 차량의 AEB를 적용했을 때, 5건의 사고가 남은 것으로 확인되었으며, 사고 감소율은 93%이다. 또한, Table 5와 같이 기존 사고에서 좌회전하는 차량의 충돌 속도는 평균 24.6 km/h 였으나, AEB를 적용 후에는 좌회전하는 차량의 평균 충돌 속도는 9.4 km/h 로 기존 사고 대비 충돌 평균 속도가 15.2 km/h 줄어든 것을 확인하였다. Fig. 6(a)는 기존 사고에서의 좌회전 차량에 충돌 속도 구간 내의 사고 건수를 나타내며 (b)는 좌회전 차량의 AEB 적용 시 충돌 속도 구간 내의 사고 건수 비교를 나타내며, Fig. 7은 좌회전 차량의 AEB를 적용했을 경우, 기존 사고와 AEB 사고의 일대일 매칭 속도 변화 그래프이다. 5건의 사고 중 4건은 충돌 속도가 낮아졌으나, 1건은 약 5 km/h 증가함을 알 수 있다.
Table 5.
Comparison of Accidents between Existing Accidents and AEB Vehicles in AEB Application of Left Turning Vehicles
그 이유로는 Fig. 8(a)와 같이 기존 사고에서는 좌회전하는 차량 운전자가 상대 차량이 접근함에 따라 속도를 급격하게 줄여 차량이 정지하였으나 상대 차량의 과실로 인하여 충돌하는 사고인 것에 비해 Fig. 8(b)는 AEB를 적용한 좌회전 차량이 상대 차량을 인지하고 브레이크를 밟아 속도를 줄이는 도중, 반대 차량의 접근으로 인하여 살짝 스치며 가는 충돌로 이어짐을 알 수 있다. 그러나 Table 6과 같이 AEB 적용 차량의 경우 기존 충돌 속도보다 4.9 km/h 증가하긴 하였으나, 기존 사고에서의 ΔV 는 19.3 km/h 대비 AEB 적용 사고에서는 ΔV 가 6.9 km/h 로 낮아지는 점에서 탑승자 상해 관점으로 보았을 때 상해가 현저히 낮을 것으로 판단된다.
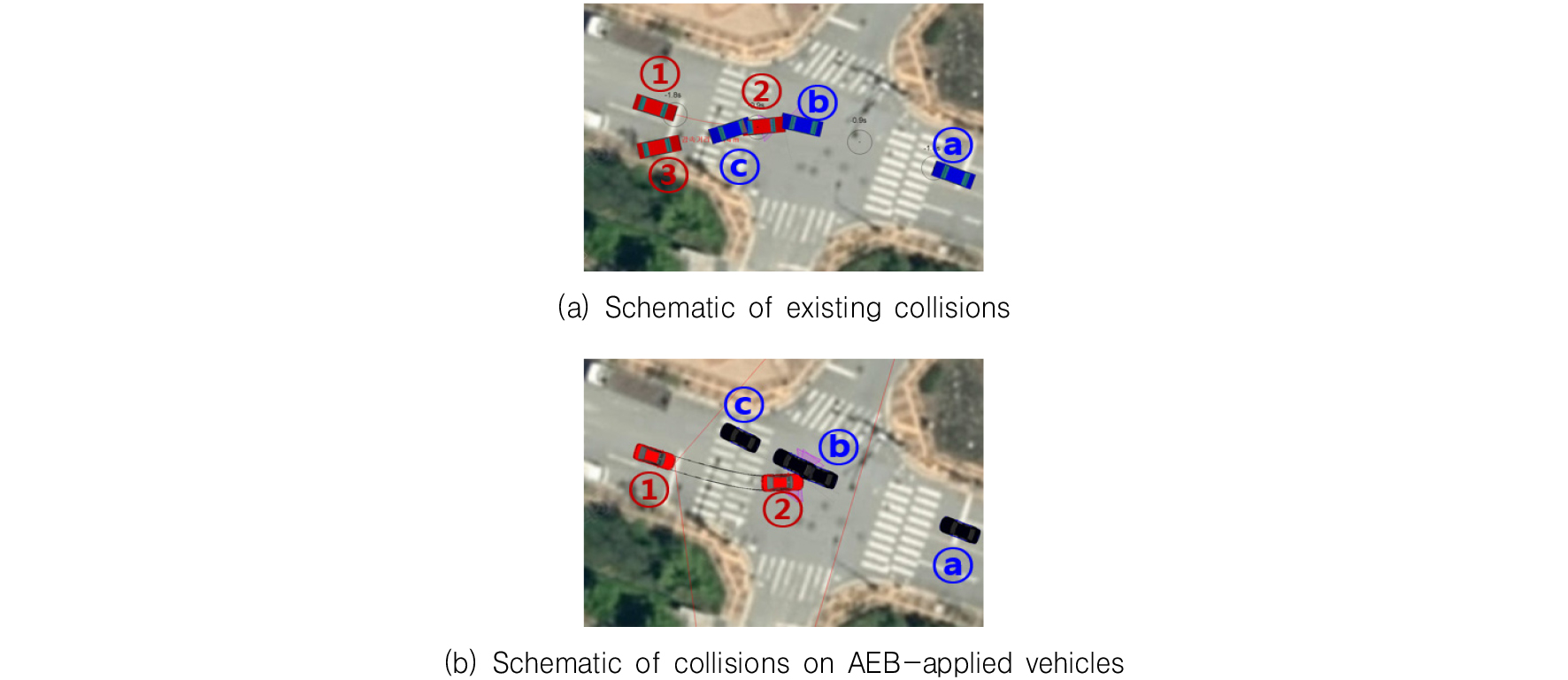
Table 6.
Speed comparison when applying AEB to left turn vehicles
4.1.2. LTAP-OD 직진 차량 AEB 적용 사고 재구성
LTAP-OD 사고 중 직진 차량에 AEB를 적용한 시뮬레이션의 결과는 다음과 같다. 직진 차량에 AEB를 적용하여 사고재구성 시뮬레이션 시 발생한 사고는 37건으로 좌회전 차량의 AEB를 적용했던 시뮬레이션보다 많은 사고가 발생하였다. 그러나 75건의 LTAP-OD 사고 중 37건이 남았으며, 사고율이 약 50% 감소된 것을 확인할 수 있다. Table 7에서 보면 기존 사고의 직진 차량에 충돌 속도는 46.6 km/h 인 반면, AEB 적용 직진 차량의 경우 32.1 km/h 로 14.5 km/h 속도가 저감하는 것을 알 수 있다.
Table 7.
Comparison of Existing Accidents and AEB Accidents by AEB Application in Straight Vehicles
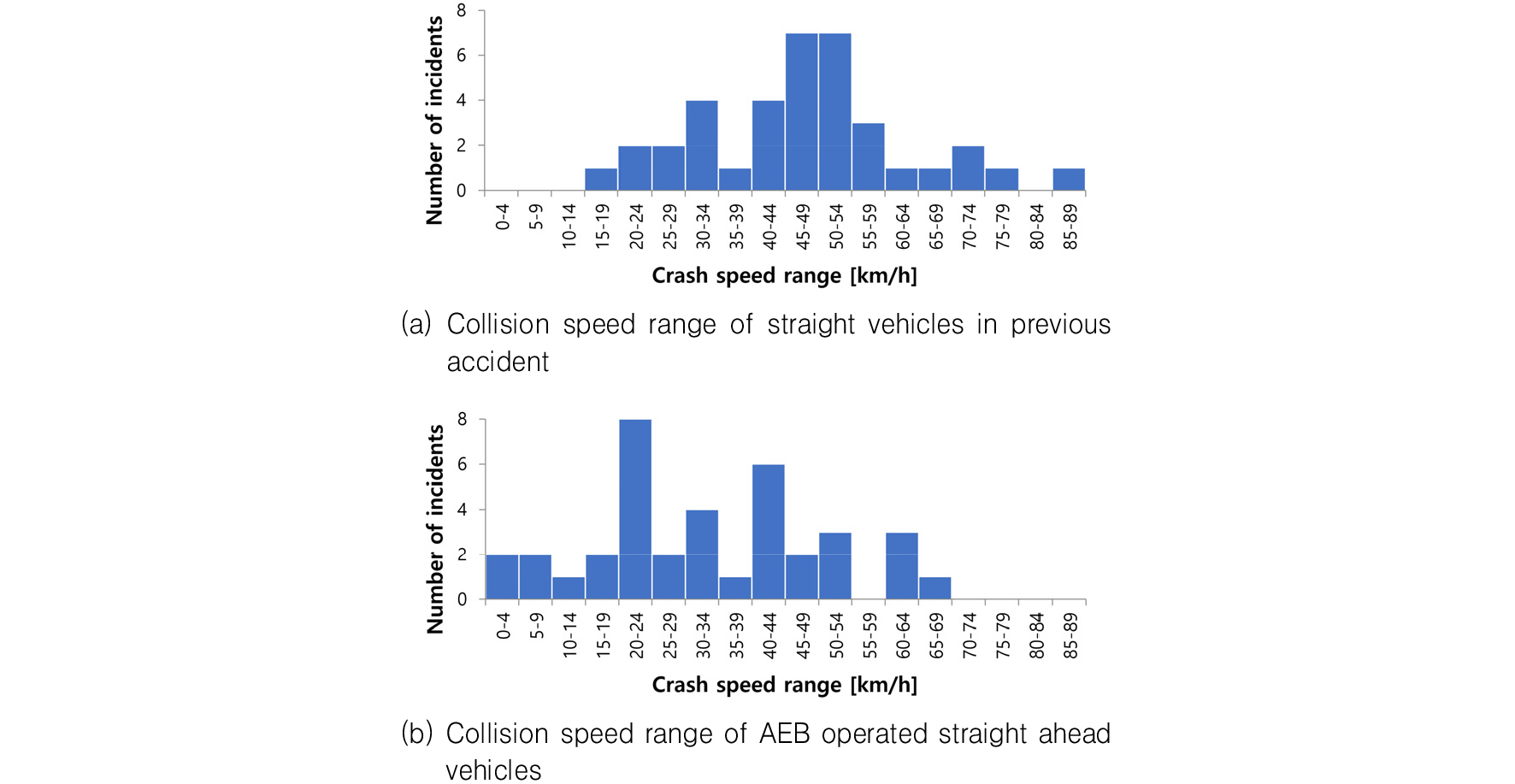
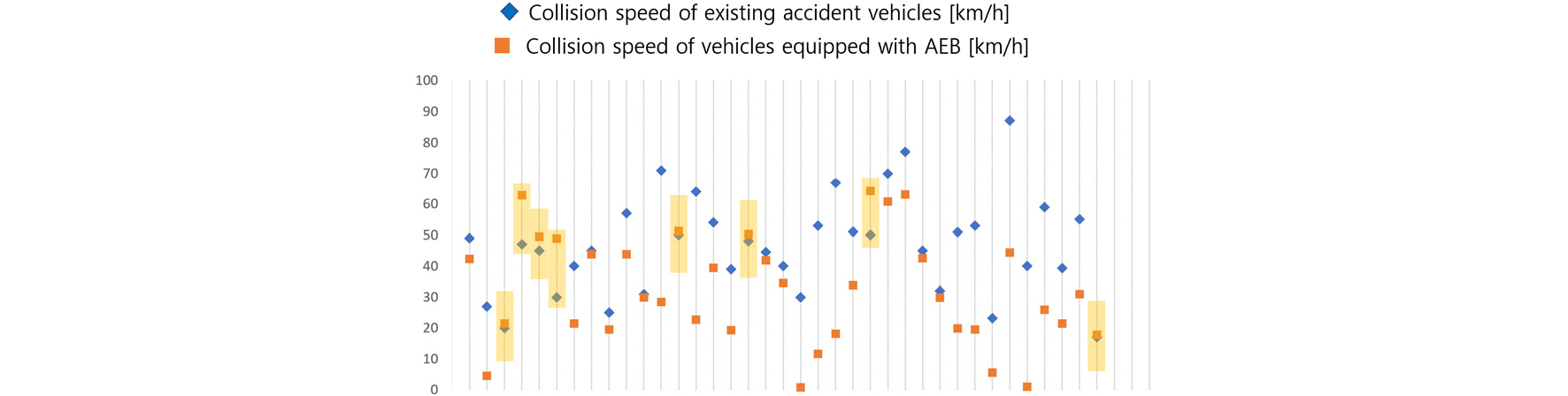
히스토그램 역시 Fig. 9(a)와 같이 기존 사고에서는 정규분포를 이루는 형태에서 Fig. 9(b)와 같이 AEB 적용 사고에서는 20 km/h 에서 24 km/h 까지의 구간과 40 km/h 에서 44 km/h 까지의 구간에서 많이 발생하는 변화를 보인다. 이는 전반적으로 AEB의 효과로 인하여 속도가 감속하여 기존 고속 구간의 있던 사고들이 좀 더 낮은 속도로 변화한 것을 알 수 있으며, Fig. 10의 그래프와 같이 일대일 사고 매칭을 통해 전반적으로 기존 사고의 충돌 속도보다 AEB 적용 차량의 충돌 속도가 저속 구간에서 많이 발생하는 것을 확인할 수 있다. 그러나 AEB 적용 차량이라 할지라도 기존 충돌 속도보다 소폭 증가하여 충돌한 사고 사례가 8건 존재하는데 그 이유로는 규정 속도 50 km/h 인 도심 지역에서 고속으로 속도위반한 사례로써 초기 속도가 100 km/h 이상 주행 중 감속하며 충돌하는 사례이다.
4.2. LTAP-OD 대표 사고
LTAP-OD 사고에서 AEB 기능을 적용했을 때 대표할 수 있는 사고를 선정하기 위하여 가장 빈도 있는 사고를 선택했다. 먼저, 좌회전 차량의 AEB를 적용한 사례는 제외하였는데, 그 이유로는 사고재구성 시, 75건의 LTAP-OD 사고 중에 거의 모든 사고가 제거되고 5건의 사고만이 남았으므로, 대표 사고로 객관화할 수 없다고 판단하였기 때문이다. 그리하여 LTAP-OD 사고 중 대표할 수 있는 사고는 직진 차량의 AEB를 적용한 37건의 사고에서 추출하였다.
Fig. 9(b)에서 보는 바와 같이 충돌 속도 구간이 20 km/h 에서 24 km/h 까지의 구간에서 사고 발생 건수가 가장 많았으며 대부분의 기존 실사고는 속도위반 및 신호 위반을 통해 나타난 사고이다. 이 중 하나의 사례를 선택하여 기존 사고와 AEB 사고가 어떠한 형태로 변화되는지를 확인하였다. Fig. 11은 직진 차량의 AEB를 적용한 사고 시뮬레이션으로 충돌 속도 구간이 20 km/h에서 24 km/h 까지의 사례 중 하나로 (a)는 기존 사고의 사고재구성이며, (b)는 직진 차량의 AEB를 적용한 사고재구성이다. 기존 사고의 경우는 Table 8과 같이 50 km/h에 규정 속도가 있는 도심 도로에서 초기 속도 68.0 km/h 속도로 과속을 하며 진행 중인 직진 차량이 좌회전하여 접근 중인 차량과의 충돌로 이어지는 사고이다. 직진 차량의 충돌 전 속도가 64.0 km/h 인 것으로 운전자는 상대 차량을 보지 못하고 돌진하여 충돌이 난 것으로 확인할 수 있다. 그러나 Fig. 11(b)를 보면 직진 차량의 AEB가 활성화되며 초기 속도 대비 충돌 전 속도가 22.7 km/h로 현저하게 저감 하였으나 접근해오는 차량과의 충돌은 피할 수 없어, 충돌한 사고 상황으로 변화되었다. 그러나 충돌 전후의 속도 변화인 ΔV를 보면 기존 사고는 41.4 km/h 인 반면, AEB 적용 차량의 경우 11.3 km/h로 기존 사고 대비 30.1 km/h 저감 하는 효과를 보인 것으로 확인된다.

Table 8.
Comparison of speed when applying AEB to straight vehicles
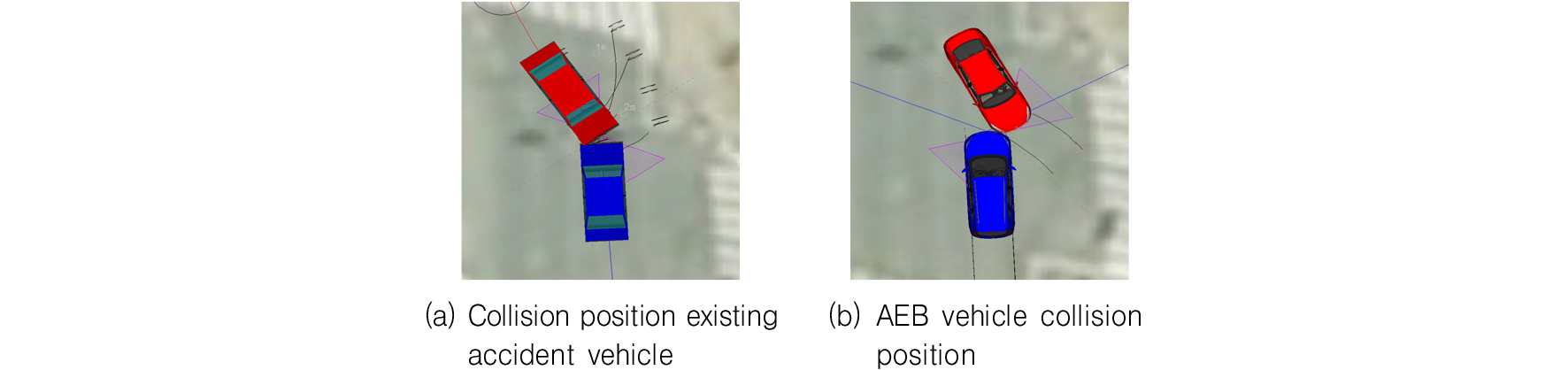
충돌 위치 또한 서로 다른 형상을 보이고 있는데, Fig. 12(a) 기존 사고를 보면, 직진 차량이 속도 저감 없이 본인 경로로 주행하여 좌회전 차량의 동승자 측 앞 범퍼를 충돌하는 것으로 보이나, AEB를 적용한 직진 차량인 (b)의 경우에서는 직진하는 차량은 속도 저감을 통해 좌회전 차량이 본인의 경로를 좀 더 나아가 좌회전 차량의 동승자 측 앞 범퍼와 직진 차량의 동승자 측 앞 범퍼와 충돌하는 것을 확인할 수 있다. 이를 통해 알 수 있는 점은 AEB가 적용된 차량과 적용되지 않는 차량과의 사고에서는 양 차량의 충돌 위치가 변화될 수 있다는 사실이다.
4.2.1. 기존 LTAP-OD 교차로 사고 충돌 포인트
기존 LTAP-OD 사고와 AEB 적용 차량 시뮬레이션 시 변경되는 양 차량의 충돌 포인트를 비교하고자 한다. 먼저, 기존 사고인 75건의 LTAP-OD 사고에서 양 차량 충돌 구성을 확인해보았다. 차량 구성은 Fig. 13과 같다. 차량 종 방향 기준으로 3등분(33.3%), 횡 방향 기준으로 5등분을 하였으며, 횡 방향에서의 차량은 앞, 뒤 범퍼 부분은 12.5%, 나머지 부분은 25% 나누어 구분하였다. 또한, Table 9와 같이 75건의 실사고 보고서를 토대로 직진 차량과 좌회전 차량이 각각 어느 지점에서 충돌하는지 그 위치를 확인하였으며, Table 9에 각 사고마다 충돌 위치별 사고 건수를 세어 표에 작성하였다.
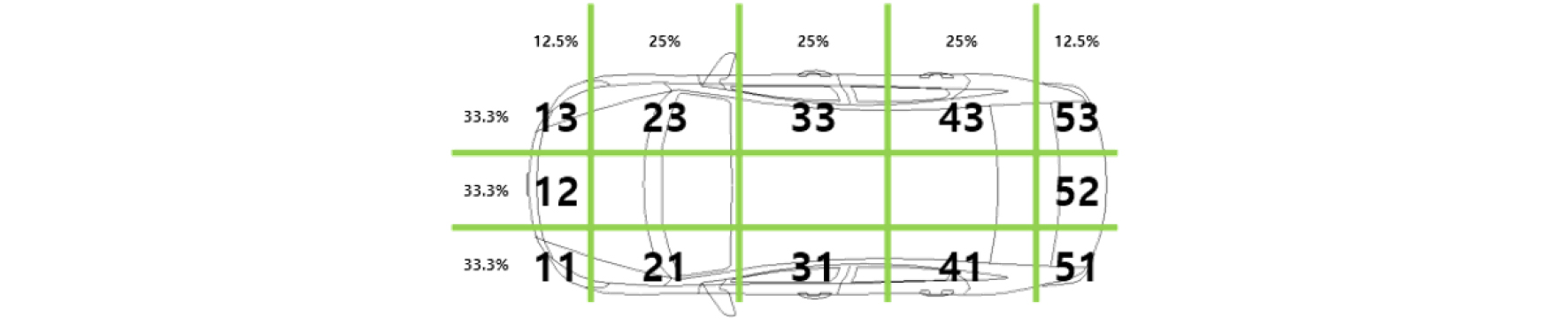
Table 9.
Impact points of LTAP-OD for layout
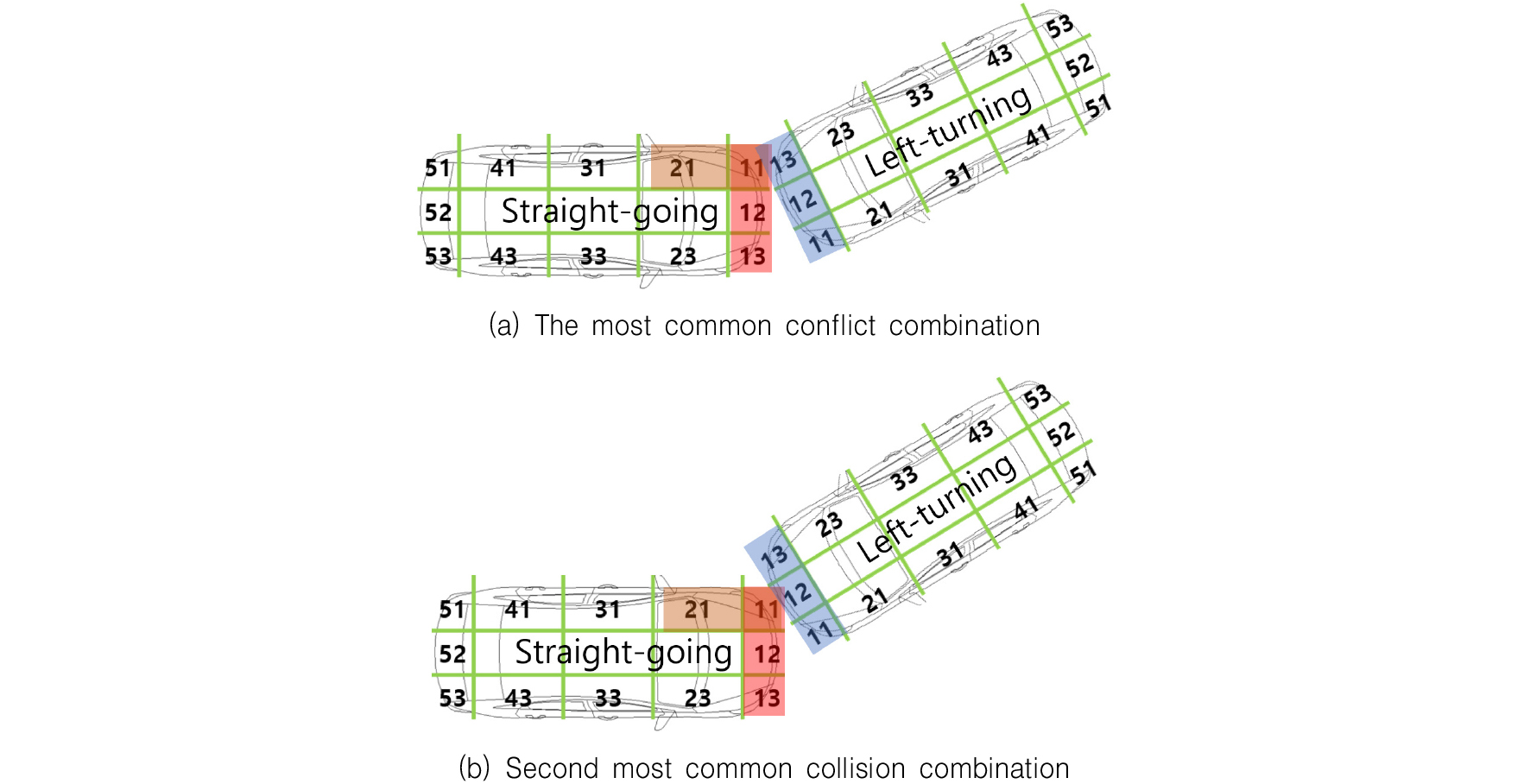
기존 국내 정면 충돌사고 중 LTAP-OD 사고에서 다빈도로 발생하는 충돌 위치로는 Fig. 14(a)와 같이 좌회전 차량 13번과 직진 차량의 11번, Fig. 14(b)와 같이 좌회전 차량의 12번과 직진 차량의 11번으로 확인할 수 있었다.
4.2.2 LTAP-OD 직진 차량 AEB 적용 충돌 포인트
AEB 직진 차량 시뮬레이션의 결과를 4.2.1장과 동일한 방법으로 확인하였다. 직진 차량 AEB 적용 차량의 사고재구성 시뮬레이션 후 남은 사고인 37건의 결과를 토대로 직진 차량과 좌회전 차량의 충돌 위치를 확인하여 해당 위치를 Table 10에 기입하였다.
Table 10.
Collision point of LTAP-OD in a straight vehicle with AEB
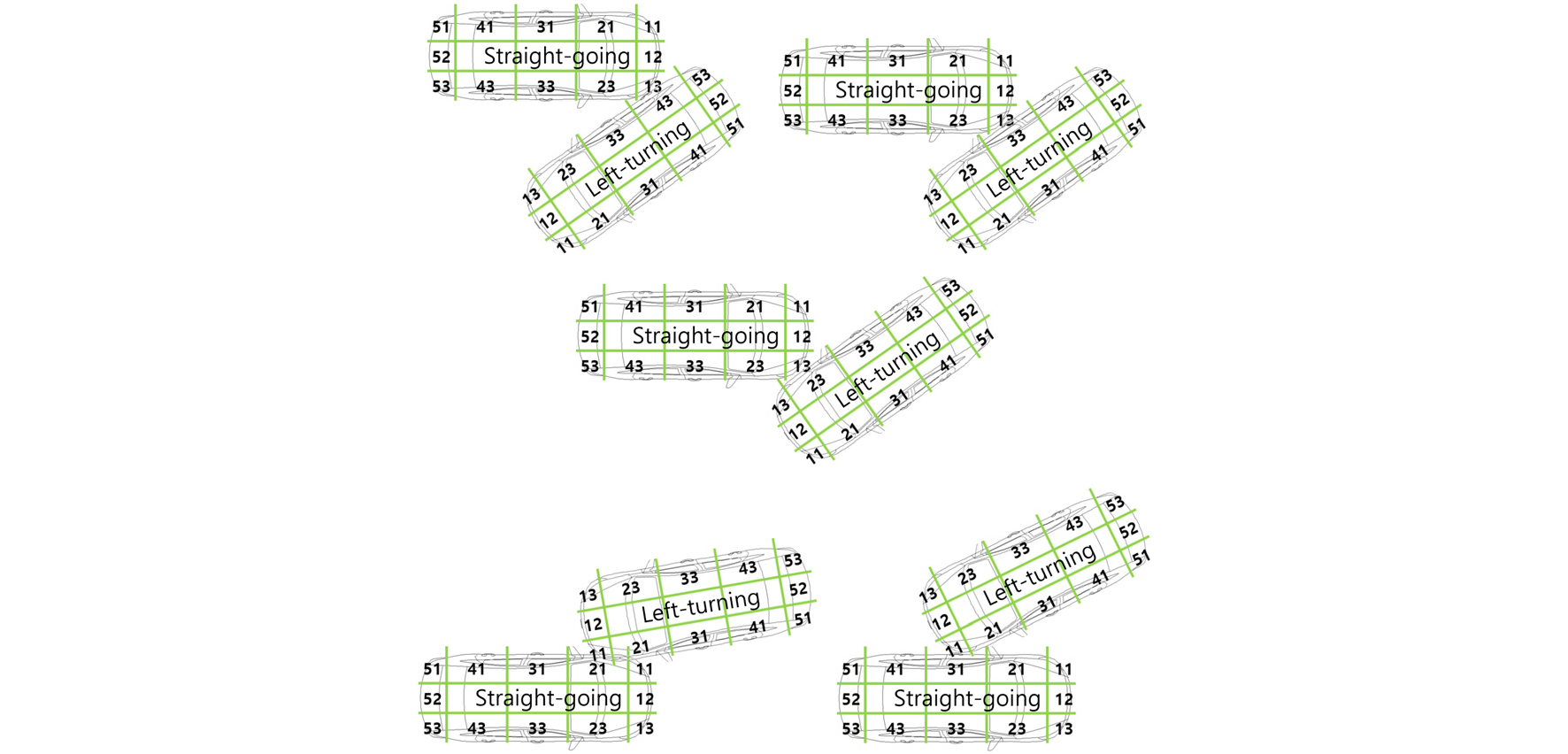
직진 차량 AEB 적용 시뮬레이션에서 가장 많이 발생한 충돌 포인트로는 직진 차량 11번과 좌회전 차량 13번이며, Fig. 15와 같은 형상이다. 기존 75건의 사고와 대표적인 사고 형상은 같으나, 기존 사고보다 많은 부분에서 충돌 포인트가 발생하였다. 기존 사고와 다르게 직진 차량의 경우, 31번이 추가되었으며, 좌회전 차량의 경우 21번, 23번, 33번, 43번이 추가되었다. 보다 자세한 설명을 위해 Fig. 16과 같이 도식화하였는데, 직진 차량의 AEB가 활성화되면서 차량 속도가 감속함에 따라 상대 차량인 좌회전 차량이 본인의 경로로 진입하다 사고가 발생하기 때문에 기존 사고에서 양 차량의 앞 범퍼 부분에서만 발생하던 사고가 AEB 적용 시뮬레이션에서는 좌회전 차량의 23, 33, 43번까지 발생하게 된 것이다. 또한, 추가적으로 좌회전 차량의 21번 부분의 사고는 직진 차량의 11번과 충돌하여 발생한 사고인데, 이 부분은 4.1.2장에서 설명했던 내용으로 직진 차량의 속도가 기존 사고보다 소폭 높아짐에 따라 교차로 진입 시에 좌회전 차량보다 먼저 진입한 뒤, 좌회전 차량을 인지하여 제동하여 정지하는 과정에 좌회전 차량이 진입하여 직진 차량의 앞 범퍼 부분과 좌회전 차량의 21번 부분의 충돌로 보여진다.

이 결과를 토대로 본 연구에서는 AEB 적용 차량의 경우 기존 사고보다 속도가 효과적으로 저감 되는 것을 알 수 있었으며, ΔV가 낮아짐으로 인하여 인체 상해 역시 기존 사고보다 낮아질 것으로 예측된다. 그러나 AEB 활성화에 따른 차속 감속 부분에서는 기존 사고보다 충돌 위치가 다양해진다는 점을 확인할 수 있었으며, 그에 따른 대응책이 필요할 것으로 보인다.
5. 결 론
본 연구에서는 국내 150건의 실사고를 바탕으로 먼저 가장 많이 발생한 사고를 확인하고, 가상의 AEB 모델을 개발하여 기존 사고에서 각 차량의 AEB를 적용하여 사고 형태가 어떻게 변경되고, 그에 따라 미래의 발생할 수 있는 사고를 예측하는 연구를 진행하였다.
본 연구의 결과를 요약하면 다음과 같다.
1) 자동긴급제동 장치 적용 시, 기존 실사고 대비 사고 수가 현저히 저감되는 것을 알 수 있었으며, 충돌 속도도 저감되는 것을 확인하였다.
2) 150건의 국내 정면충돌 사고 중 대표할 수 있는 사고는 LTAP-OD이며, 50%의 비율을 차지하고 있다.
3) LTAP-OD 사고 중 AEB 좌회전 차량 시뮬레이션의 경우 사고 저감율이 90% 이상 저감하는 효과를 확인할 수 있었으며, AEB 직진 차량 시뮬레이션의 경우 사고 저감율이 약 50% 저감되는 것을 알 수 있었다.
4) LTAP-OD AEB 시뮬레이션에서는 기존 사고와 비교하여 더욱 다양한 사고 형태가 나타남을 알 수 있었다.
5) 본 연구의 제한 사항으로는 AEB 모델이 현재 양산되고 있는 차량과는 달리, 이상적인 센서의 형태를 띄고 있으며, 매우 단순화된 모델이므로 실제 차량의 AEB를 적용하여 시뮬레이션을 수행할 경우 결과가 변경될 수 있다. 그 이유로는 현재 양산 중인 차량의 경우 가변 TTC를 적용하고 있으므로 차량 속도에 따라 TTC가 0.8~1.4 sec 영역대에서 변화하나, 본 연구에서는 TTC 1.2 sec 미만인 경우에 AEB가 활성화되는 조건을 적용했다.
