

1. 서 론
2. 신호현시 정보 제공 시스템
2.1. Connected Vehicle을 위한 V2X 기술
2.2. 신호현시 정보 제공을 위한 차세대 지능형교통체계(C-ITS)
2.3. V2X 통신 시스템의 신호현시 정보
3. TOD 기반 신호현시 제공
3.1. 신호시간 계획 분석
3.2. 신호운영계획 DB화
3.3. 신호현시 정보 생성
4. 시간 지연특성 시험 및 결과 분석
4.1. 시험환경
4.2. 시험결과
5. 결 론
1. 서 론
자율주행 기술에 대한 연구가 전 세계적으로 활발히 진행되고 있다. 자율주행차에 대해 각국의 정부에서는 자동차에 의한 사고를 줄이기 위한 수단으로 고려하고 있고, 민간 부분에서는 새로운 산업 분야로 생각하고 기존 자동차업계 뿐만 아니라 전자 및 통신업계에서도 이에 대한 연구개발에 박차를 가하고 있다.
자율주행 자동차는 인지, 판단, 제어 알고리즘을 이용하여 안전하게 목적지까지 이동시켜주는 시스템이다. 안전한 자율주행을 위해서는 다양한 시스템이 적용되는데 주변 차량 및 물체를 인지하기 위한 라이다와 레이더 등의 센서 기술, 현재의 위치를 인식하는 정밀 측위 기술, 인지한 데이터를 분석하여 판단하기 위한 AI 및 S/W 기술, 판단에 따른 구동계와 조향계의 제어 기술 등이 있고, 특히 차량통신(V2X: Vehicle to Everything) 기술은 센서에 의한 인지 범위를 넓혀 자율주행 안정성을 확대할 수 있는 핵심 기술로 활용될 수 있다.
차량 간 무선 통신을 위한 대표적인 후보 기술로는 WAVE(Wireless Access in Vehicular Environment)와 C-V2X(Cellular-V2X) 기술이 있다. WAVE 통신기술은 IEEE 802.11 계열의 Wi-Fi 기술을 차량 통신환경에 맞게 변경한 통신시스템으로 C-ITS(Cooperative-Intelligent Transport System)와 같은 V2X 서비스 실증사업 뿐만 아니라 국내외 많은 V2X 시스템에 적용되어 있다. C-V2X 기술은 이동통신 기반의 V2X 통신 기술로서 기존 이동통신 시스템에서는 모바일 단말과 기지국 간의 통신만 가능하였으나 단말 간 직접통신이 가능한 인터페이스를 새롭게 정의하여 V2X 서비스를 가능하도록 하였다.
차량 및 도로 안전을 위한 대표적인 V2X 시스템으로는 C-ITS가 있다. C-ITS는 2013년 국토교통부의 C-ITS 도입을 위한 정책연구에서 “안전중심의 이동성, 지속성(친환경성)을 증진시키는 목표로 차량과 차량 간(V2V), 차량과 인프라 간(V2I) 양방향 무선통신으로 정보를 교환 및 공유하는 오픈 플랫폼 기반의 서비스를 제공하는 독립형 시스템 이상의 차세대 ITS”로 정의되어있다. 국내에서는 2014년 대전-세종 지역 C-ITS 시범사업을 시작으로 제주, 광주, 서울, 울산, 고속도로 실증사업이 완료 또는 진행되고 있고, 최근 한국판 뉴딜계획에 따라 2025년까지 고속국도 4,075km(100%)를 비롯하여 전국 주요 간선 도로에 C-ITS를 구축할 계획에 있다.(1)
이러한 C-ITS에 활용되는 통신기술의 표준 채택에 대한 논의가 국내외적으로 활발히 진행되고 있다. 2018년부터 상용화된 WAVE 기반의 C-ITS는 국내 및 미국, 유럽 등 많은 곳에서 실증사업이 진행되었고 서비스되고 있다. 국내 통신표준에 막대한 영향력이 있는 미국에서는 2016년 WAVE 기반의 단말을 의무장착하는 법률이 통과되었으나 트럼프 정부에서 해당 법률의 시행이 보류되었다. 2020년 12월에는 기존 ITS 단말용으로 할당된 WAVE 통신 주파수 대역을 C-V2X로 재할당하는 FCC의 결정이 있었으나 USDOT와 ITS America의 반대의견 및 재논의 요청으로 논란이 뜨거운 상황이다. 중국에서는 일찌감치 C-ITS를 위한 표준 통신기술을 C-V2X로 선정하고 이에 대한 연구개발을 진행하고 있다. 또한, 이동통신사는 2023년 상용화가 예상되는 C-V2X 통신기술을 5G 통신의 핵심 응용 분야 중 하나로 선정하여 차량 통신 분야에서의 영향력을 확대하고 있다.
현재 C-ITS 서비스를 이용하여 제공되는 정보 중 안정적인 자율주행에 큰 효용성을 제공하는 정보는 교차로 신호현시 정보이다. 기존 자율주행 시스템에서는 교차로에서의 신호현시 정보를 획득하기 위하여 신호등의 이미지를 센싱하는 기술을 이용하였으나 이는 지형과 지물에 따라 인식 성능이 천차만별이고 어둡거나 빛이 반사되는 장소에서는 인식이 어려운 문제점이 있으며 다음 신호 상태 전이까지 남은 시간 정보 없이 현재 신호의 상태만 확인할 수 있었다. 이러한 문제점을 해결하기 위해 C-ITS 시스템에서는 무선통신기술을 이용하여 현재 신호의 상태와 다음 신호상태까지 남은 시간 정보가 포함된 신호현시 정보를 제공한다. 한편, 자율주행에서 신호현시 정보는 차량과 사람의 안전에 직접적인 영향을 미치기 때문에 실시간성이 상당히 중요하고, C-ITS 서비스에 이용되는 통신 기술에 따라 시간 지연 특성이 존재한다.
모든 신호등은 단일로 및 교차로 등 도로 지형과 신호 운영 제어전략에 따라 각각의 신호시간 계획을 기반으로 동작하고 있다. 각 교차로에서의 신호현시는 이러한 신호시간 계획을 기반으로 시각에 따라 정해져 있고, 각 시각에서 다음 현시로 바뀌기까지 남은 시간도 정해져 있다고 할 수 있다. 그러므로 자율주행차는 해당 교차로의 신호시간 계획을 가지고 있으면 현재 시각의 신호현시와 다음 현시로 바뀌기까지 남은 시간 정보를 획득할 수 있고, C-ITS 시스템을 이용하여 실시간 신호현시를 제공받을 필요가 없다고 판단된다.
본 논문에서는 V2X 통신을 이용한 신호현시 정보 제공 시스템의 통신방식에 따른 시간 지연특성 분석과 V2X 통신으로 실시간 신호현시 제공이 필요없는 신호현시 제공 시스템을 제안한다. 그리고 이에 대하여 교차로 자율주행 가능성을 확인하고자 신호운영 계획에 따른 신호현시 대비 실제 신호 간 오차 특성을 분석하였다.
2. 신호현시 정보 제공 시스템
이번 장에서는 자율주행 자동차에 신호현시 정보를 제공하기 위한 제반 기술에 대해 설명한다. 신호현시 정보는 신호시간 계획에 따라 신호제어기에서 생성되어 C-ITS 서비스를 통해 자율주행 자동차에게 전달된다. 본 장에서는 실시간으로 생성된 1) 신호현시 정보 제공을 위한 무선통신 기술에 대해 설명하고, 2) 무선통신 기술에 따른 신호현시 정보 제공 시스템, 3) 무선통신을 이용한 신호현시 정보의 제공과 차량에서의 신호현시 정보 인지 방법에 대하여 기술한다.
2.1. Connected Vehicle을 위한 V2X 기술
Connected Vehicle은 기존 stand-alone으로 주행하던 자동차에 V2X 무선통신을 기반으로 연결성(Connectivity)을 제공함으로써 주변의 자동차・도로 인프라・보행자 및 일상생활의 모든 요소들과의 양방향 소통을 통해 안전주행, 교통혼잡 방지 및 다양한 서비스를 제공할 수 있는 자동차를 의미하고,(2) 이러한 연결성을 자율주행차로 확장하여 주변 차량의 상태와 신호현시 정보 및 도로공사/사고 정보 등을 포함한 교통정보를 실시간으로 수집하여 차량제어 안정성을 향상할 수 있는 협력형 자율주행(CAV: Connected Autonomous Vehicle) 개념으로 발전되고 있다.
V2X 통신은 차량을 중심으로 다른 통신요소 간의 통신을 의미하고, 차량 간(V2V), 차량과 노변장치 간(V2I) 통신을 포함하여 차량과 보행자(V2P), 차량과 모바일 장치(V2N) 등으로 확장할 수 있다. 앞서 언급한 것처럼 현재 Connected Vehicle에 사용될 수 있는 대표적인 V2X 무선통신 기술로는 WAVE와 C-V2X가 있다. 국내 V2X용 주파수는 5.855~5.925GHz 대역을 지능형교통시스템(ITS)용으로 10MHz 대역폭의 7개 채널을 각각의 서비스에 맞게 할당하여 사용하고 있다.
V2X 통신을 위한 각 통신기술은 각각의 특징과 장단점을 가지고 있다. WAVE는 오랜 연구를 통해 안정적인 성능을 보이지만, C-V2X는 높은 데이터 전송율과 넓은 통신거리를 보인다. 또한, WAVE 통신을 이용한 서비스는 교통안전 향상을 위해 공공성을 기반으로 국가에서 구축하여 무료로 사용이 가능하지만, C-V2X는 이동통신사가 구축하고 서비스되어 사용자에게 이용료가 부과될 가능성이 높다. 어떤 통신기술이 V2X 통신에 더 적합한지는 학계와 산업계에서 계속 논쟁중에 있고, 국내에서는 WAVE와 C-V2X 기술을 이용하여 각각의 시범사업의 결과를 통해 최종적으로 단일 통신표준을 선정할 계획에 있다. 한편, 이 두 개의 통신기술을 함께 사용하는 하이브리드 통신에 대한 요구도 높아지고 있는 상황으로 유럽에서는 18개국 50개 도시에서 하이브리드 통신을 사용하는데 동의하였다.(3)
2.1.1. WAVE 기반 V2X 통신기술
초기 V2X은 Electric Toll Collection 서비스와 같은 단순한 ITS 서비스를 제공하기 위해 1Mbps, 100m의 통신영역을 제공하는 DSRC(Dedicated Short Range Communication) 통신기술을 사용하였다. 이후 고차원의 ITS 서비스에 대한 요구와 무선통신기술이 발달함에 따라 차세대 V2X 통신기술의 필요성으로 최대 1km 통신영역, 3~27Mbps의 메시지 전송속도, 이동속도 200km/h를 지원하기 위한 차량통신으로 WAVE 통신 표준이 연구되기 시작하였다.
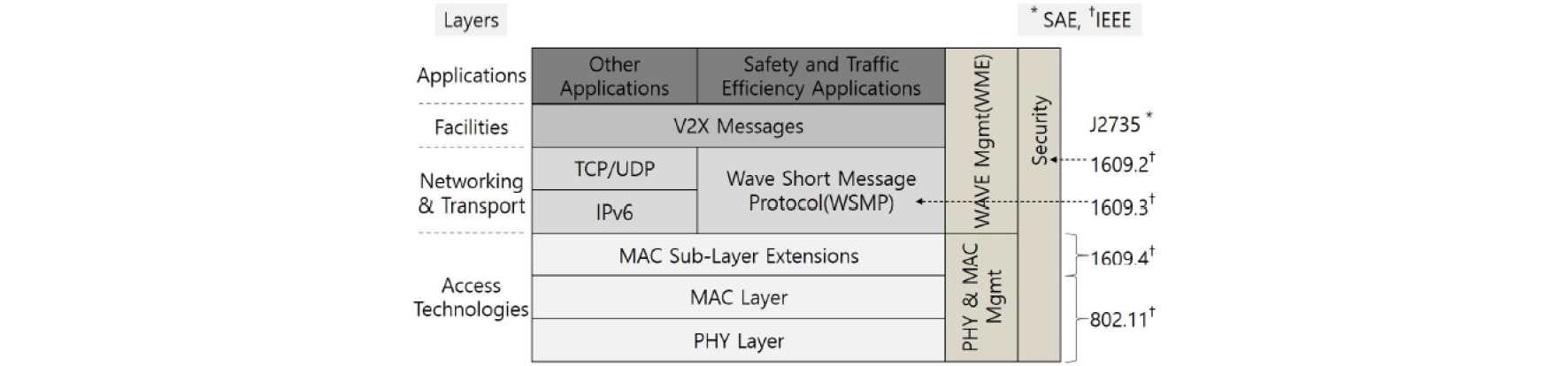
WAVE 통신표준은 Fig. 1과 같이 IEEE 802.11p,(4) IEEE 1609.x와 상위 표준으로 구성된다. IEEE 802.11p는 기존 Wi-Fi에서 차량통신에 적합하도록 단말 간 직접통신이 가능한 기술이 정의되어있다. IEEE 1609는 차량 통신을 위해 새롭게 추가된 상위 계층의 동작이 정의되어있고, 1609.2, 1609.3, 1609.4로 구성된다. IEEE 1609.3(5)은 네트워크 계층에 대한 내용과 WAVE 통신 메시지의 구조가 정의되어 있다. 또한, WAVE 장치는 제어채널과 서비스 채널 간 채널 스위칭을 이용하여 서비스 메시지를 송수신하는데, 이러한 내용은 IEEE 1609.4(6)에 정의되어있다. IEEE 1609.2(7)에는 PKI 기반의 보안 메시지를 송수신하기 위한 동작이 정의되어 있고, WAVE 장치는 unsecured, signed, encrypted 형태의 보안 메시지를 송수신할 수 있다.
WAVE 통신의 모태인 IEEE 802.11a(Wi-Fi)가 802.11n, 802.11ac, 802.11ax 등으로 진화됨에 따라 이러한 기술을 이용하여 차량통신 기술의 성능을 향상시키기 위해 IEEE 802.11bd라는 이름으로 표준화가 진행중이고, NGV(Next Generation V2X)로도 불리는 IEEE 802.11bd는 더욱 고차원의 V2X 서비스를 제공하고자 한다.(9,10)
2.1.2. C-V2X 기반 V2X 통신기술
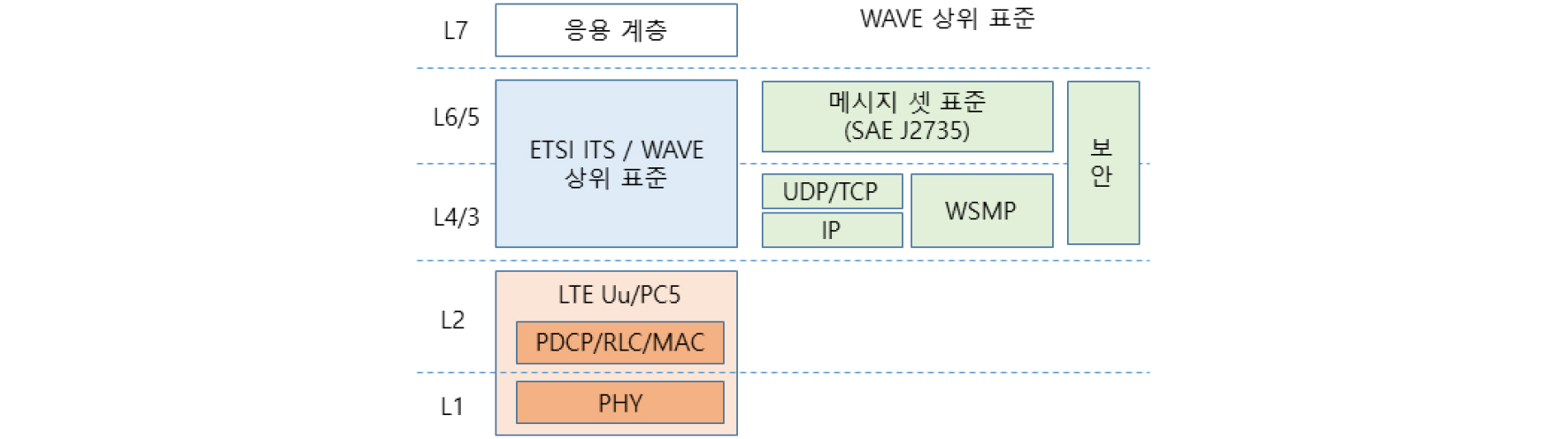
C-V2X는 기존 LTE 통신의 방송서비스(eMBMS) 기술(Rel 9, 2009년)과 단말 간 근거리 통신(D2D: Device to Device) 기술(Rel 12, 2014년)을 기반으로 차량 통신을 위한 기술들이 2017년 3GPP Release 14에 포함되어 Phase 1 LTE-V2X가 표준화되었다. 2018년 6월 완료된 5G 표준인 Rel 15에는 Phase 1의 개선된 기술이 Phase 2 LTE-eV2X 규격으로 포함되었고, 2020년 7월 완료된 Rel 16에 5G 통신을 이용한 V2X 표준이 Phase 3 NR-V2X 규격으로 정의되었다.(2) LTE-V2X 프로토콜 스택은 Fig. 2와 같이 구성되고, V2X를 위한 새로운 PHY와 MAC 계층 표준을 정의하였고 상위 계층은 IEEE, ETSI와 SAE에서 정의한 표준과 프로토콜을 재사용한다.(11)
C-V2X에서는 기존 LTE 통신에서 사용하는 단말(UE: User Equipment)과 기지국(eNodeB) 간 통신인 Uu 인터페이스와 기존 업링크/다운링크와 구별되는 사이드링크 채널을 이용해 단말 간 직접 통신이 가능한 PC5 인터페이스의 전송모드 3과 4를 새롭게 정의하였고, 이 두 개의 인터페이스를 독립적으로 또는 함께 사용하여 V2X 메시지를 송수신할 수 있도록 하였다.(13)

LTE-V2X(Rel. 14)의 use case는 safety, network operation, information, service 위주의 25가지가 TR 22.885에 제시되었고, 이후 자율주행, 플래투닝, 협력주행과 같은 고대역폭의 복잡한 시나리오인 Automotive Driving, Cooperative Driving, Multi Network, Service/Safety에 대한 use case가 제안되었으며 Rel 15 표준의 LTE-eV2X 요구사항에 반영되었다.(2) 특히, Rel 15에는 LTE 통신보다 진보된 5G 통신이 표준화되어 차량 간 통신, 사물 간 통신, 산업 자동화 서비스 등의 다양한 응용 서비스 수용을 위해 enhanced Mobile BroadBand(eMBB), ultra-Reliable Low Latency Communication(URLLC), massive Machine Type Communication(mMTC) 등의 사용자 응용 시나리오가 포함되었다. NR-V2X가 정의된 Rel 16에는 LTE-eV2X 요구사항을 만족하기 위해 5.9GHz 대역과 함께 mmWave 대역을 사용할 수 있도록 하였고, LTE와 5G를 동시에 사용할 수 있는 통합 구조 설정과 PC5 인터페이스에서 유니캐스트와 그룹캐스트 통신방식을 추가하여 통신 그룹을 구성하여 실시간으로 차량의 카메라 영상이나 센서정보를 교환하는 자율주행, 원격제어, 군집주행 등의 다양한 응용서비스를 제공할 수 있도록 하였다.(9,13)
2.2. 신호현시 정보 제공을 위한 차세대 지능형교통체계(C-ITS)
앞서 언급한듯이 V2X 통신시스템을 이용한 C-ITS 시스템의 대표적인 서비스는 신호현시 정보를 제공하는 것이다. 본 절에서는 이러한 V2X 통신 방식에 따라 현재 구축된 시스템의 신호현시 제공 방법에 대해 기술한다.
2.2.1. 신호현시 정보 생성
신호현시 정보는 신호시간 계획에 따라 신호제어기의 CPU에서 실시간으로 생성되어 신호제어기의 옵션보드의 일종인 CVIB(Connected Vehicle Interface Board) 장치를 통해 타 장치로 전달된다. 이때 타 장치는 C-ITS의 노변기지국(RSU: Road Side Unit)이 될 수도 있고, 관제센터 등이 될 수도 있다.
CVIB 장치와 타 장치는 이더넷 통신을 이용하여 연동되고 SSL 통신으로 암호화되어 보안 메시지로 송수신된다. 두 장치 간 통신 프로토콜은 경찰청 교통신호제어기 표준규격서(14)에 정의되어있다. CVIB 장치에서는 Table 1과 같이 신호등의 방향, 출력형태 별로 각각의 신호등 상태와 다음 상태까지 남은 시간에 대한 정보를 정의된 메시지 포맷으로 전달한다. 이렇게 전달된 신호현시 정보는 각 연동장치의 방식에 따라 정보를 가공/ 변환하여 자율주행 자동차 또는 다른 장치가 사용할 수 있도록 전달하게 된다.
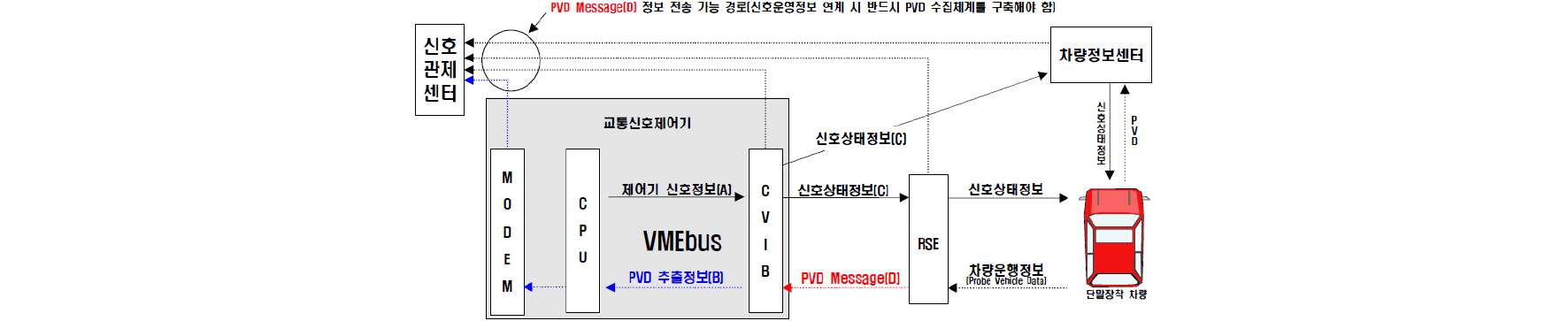
Table 1.
Information list of CVIB
2.2.2. WAVE 기반 신호현시 정보 제공
WAVE 기반의 V2X 시스템에서는 신호제어기의 CVIB에서 전송하는 신호현시 정보를 RSU가 수신하고 SAE J2735의 SPaT(Signal Phase and Timing) 메시지로 변환하여 무선통신으로 전송한다. 이때 WAVE SPaT 메시지는 5.9GHz 대역의 182번 채널(I2V용)을 이용해 100ms의 주기로 전송된다. WAVE 기반의 신호현시 정보제공은 신호현시 정보의 생성에서부터 RSU가 메시지를 전송하기까지의 과정이 현장에서 수행되어 신호현시 정보의 실시간성을 확보할 수 있다.
현재 대전-세종, 제주, 광주 등에 구축된 C-ITS 실증사업에서는 주로 WAVE 통신 시스템을 이용하여 신호현시 정보가 차량에 제공되고 있다. WAVE 기반의 신호현시 정보제공은 현장 방식의 신호정보 연계로 시스템이 단순하고 RSU에서의 브로드캐스팅 방식으로 SPaT 메시지가 전송되어 신호현시 정보에 대한 통신 트래픽이 증가하지 않는다는 장점이 있지만, 각 교차로와 횡단보도 등에 신호제어기의 CVIB와 V2X 통신 시스템 구축이 필수적이라 많은 비용이 소요된다는 단점이 있다.
2.2.3. LTE 기반 신호현시 정보 제공
C-V2X 시스템에서는 다양한 교통정보 제공을 위해 기지국에서의 브로드캐스팅 전송방식을 지원하지만, 현재 상용화된 C-V2X 통신 시스템이 없어 브로드캐스팅 기반의 신호현시 정보를 제공하지 못하는 상황이다. 현재 진행되고 있는 이동통신 기반의 V2X 시스템 또는 자율주행 실증사업에서는 각 사이트의 신호현시 정보를 교통정보 센터로 수집하고 정보제공 서버가 차량 시스템과 연결되어 LTE 또는 5G 통신을 이용하여 신호현시 정보를 제공하고 있다.
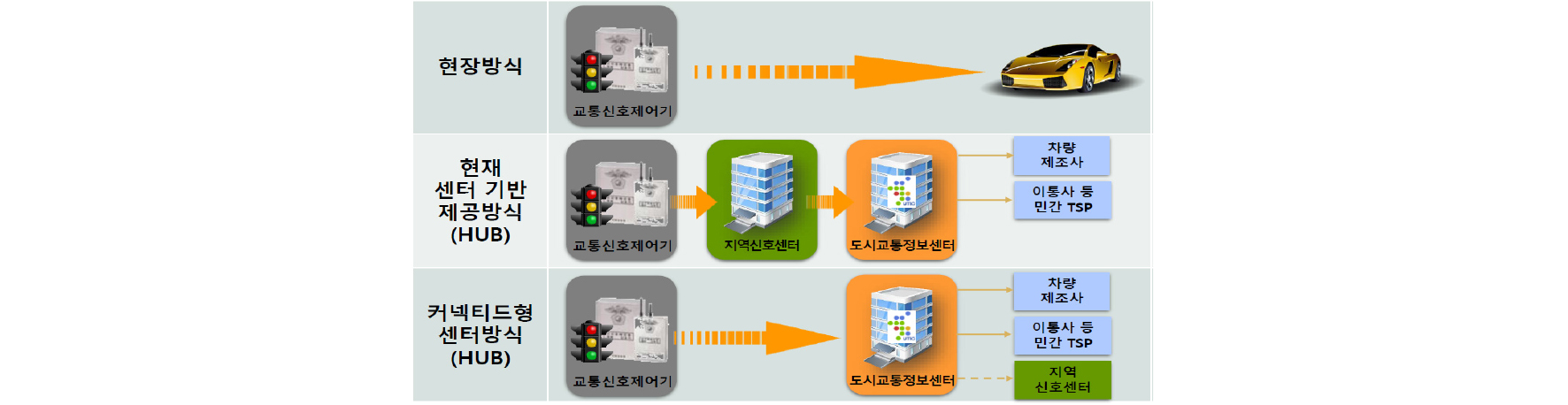
LTE 통신 기반으로 신호현시 정보를 제공하기 위하여 도로교통공단은 2017년 부천, 군포, 의왕, 2018년 서울을 대상으로 실시간 교통신호 정보 연계 통합 DB를 구축하는 시범사업을 진행하였다. 본 사업에서는 신호제어기가 지역 신호센터로 신호현시 정보를 전달하고 경찰 유선망을 통해 경찰청 도시교통정보센터로 전달한다. 이는 전용회선 또는 Open-API를 통해 서비스제공업체로 제공되고 포털업체, 내비게이션 업체, 차량 제조사, R&D 기관 등에서 사용한다.
현장 시스템이 아닌 센터 기반의 신호현시 제공 방식에서 가장 문제가 되는 부분은 여러 시스템 장치를 거치며 발생하는 신호현시 정보의 지연 시간이다. 도로교통공단이 진행한 시스템의 지연시간 측정 시 평균 약 1~3초 정도의 지연시간과 매회 지연시간의 편차가 크다는 문제가 발생하였다. 이를 개선하기 위해 지역 신호센터를 경유 하지 않고 도시교통정보센터가 직접 신호현시를 수집하여 전체 평균 0.345초의 지연시간이 측정되었고, 기존 방식에 비해 신호현시 정보의 실시간성을 확보할 수 있음을 확인하였다.(15) 이러한 방식은 신호제어기의 CVIB와 RSU와 같은 현장 인프라 구축이 필요 없어 추가의 비용이 소요되지 않는 장점이 있지만, 1:1 연결 방식으로 많은 차량이 신호현시 정보제공을 요청하면 통신트래픽이 증가하여 신호현시 정보의 지연시간도 증가할 수 있다는 단점이 있다.
2.3. V2X 통신 시스템의 신호현시 정보
커넥티드 자동차 또는 자율주행 자동차는 V2X 통신시스템을 이용해 표준 메시지인 SAE J2735(17) SPaT와 MAP 메시지를 수신하고 해석하여 현재 차선에서 이동에 필요한 신호현시 정보를 인지할 수 있다. J2735 SPaT 메시지에는 교차로의 각 진행 방향 별 신호현시 정보가 포함되어있고, J2735 MAP 메시지에는 교차로의 형상정보를 포함하고 있어 이를 이용하여 자신이 필요한 방향의 신호현시 정보의 추출이 가능하다.
SAE J2735 SPaT 메시지는 교차로의 현재 신호현시와 남은 시간에 대한 정보가 포함되어 100ms의 주기로 전송되고 있다. 국내에서 운용되고 있는 C-ITS의 신호현시 정보는 교차로의 각 신호등 방향을 기준으로 8방향으로 구분하여 직진/좌회전/보행자 등의 신호를 각각 독립적인 “movement”로 할당해 적/녹/황색/점멸 등의 현재 상태 정보와 다음 상태로 바뀌기까지 남은 시간 정보를 제공하고 있다. 직진과 좌회전 movement의 상태는 “녹 → 황 → 적 → 녹”으로 변경되고, 보행자 movement는 “녹 → 적 → 녹”으로 변경이 정해져 있어 현재 상태를 통해 다음 상태 확인이 가능하다.
각각의 movement는 SPaT 메시지의 “signalGroup” 필드 정보를 이용해 구분되고, 여러 교차로의 SPaT 메시지를 동시에 수신하는 차량이 교차로를 구분할 수 있는 구분자인 “ID”가 포함되어 현재 교차로와 차선에서 서비스에 필요한 신호현시 정보를 movement 단위로 확인할 수 있다. C-ITS 서비스의 호환을 위해서는 이러한 “ID”와 “signalGroupID”에 대한 체계 정립 또는 표준화가 필요하지만, 현재는 표준화 되어있지는 않고 이에 대한 표준 제정 작업이 진행 중인 상황이다.
SAE J2735 MAP 메시지는 교차로의 차선별 형상정보가 포함되어있는 메시지로 각 차선에 할당된 “laneID” 필드 정보로 차선별 정보가 구분된다. 차선별 형상정보에는 교차로 기준점으로부터 각 차선의 상대적인 위치(offset), 해당 차선에서 이동할 수 있도록 연결되는 차선(connectingLane), 각 차선에서 할 수 있는 행위(maneuvers: 좌회전/우회전/직진 등), 교차로 해당 차선이 인지해야 하는 신호정보의 ID(signalGroupID) 등이 포함되어 100ms 주기로 전송된다.
Table 2.
Main field of J2735 SPaT message
교차로의 차선은 교차로 중심을 기준으로 접근 차선(ingress)과 나가는 차선(egress)으로 구분되는데, 차량이 교차로 통과에 필요한 신호현시 정보를 인지하기 위해서는 특히 접근하는 차선에 대해 신호현시 정보를 인지할 수 있는 정보가 필요하고 MAP 메시지에 포함된 차선별 정보에서 “signalGroup” 필드 값을 이용하여 해당 차선에서 인지해야 할 신호현시 정보를 확인할 수 있다. MAP 메시지는 SPaT 메시지와 같이 실시간으로 변경되는 정보는 아니고 도로 형상이 바뀌면 업데이트되는 정보이다.
Table 3.
Main field of J2735 MAP message
3. TOD 기반 신호현시 제공
다양한 교통정보가 공공데이터 개방이라는 정부 방침에 따라 공공데이터 포털에 등록되어 개방되었고 향후 전국으로 확대 개방할 계획에 있다.(15) 시범적으로 개방된 공공데이터 중 서울시 400여 개의 교차로에 대한 TOD(Time of Day)는 신호주기, 현시시간, 연동값 등의 정보가 포함되어있어 현재 운영 중인 교차로 신호등의 신호시간 계획 정보를 확인할 수 있고 이를 이용하여 해당 시각에 계획된 신호현시 정보의 생성이 가능하다.
이러한 TOD를 이용하여 차량 내 시스템에서 해당 시각과 교차로 위치의 신호현시 정보를 생성하면 V2X 통신 장치를 이용해 제공받을 필요가 없고, 이에 따라 신호현시 정보의 지연시간에 따른 실시간성 이슈와 현장에 신호현시 제공을 위한 장치 구축이 필요 없을 것으로 판단된다.
본 장에서는 앞서 살펴본 현장 방식과 센터 방식의 신호현시 정보 제공이 아닌 차량에 구축된 신호시간 계획 정보인 TOD를 기반으로 한 신호현시 생성 방법에 대하여 설명한다.
3.1. 신호시간 계획 분석
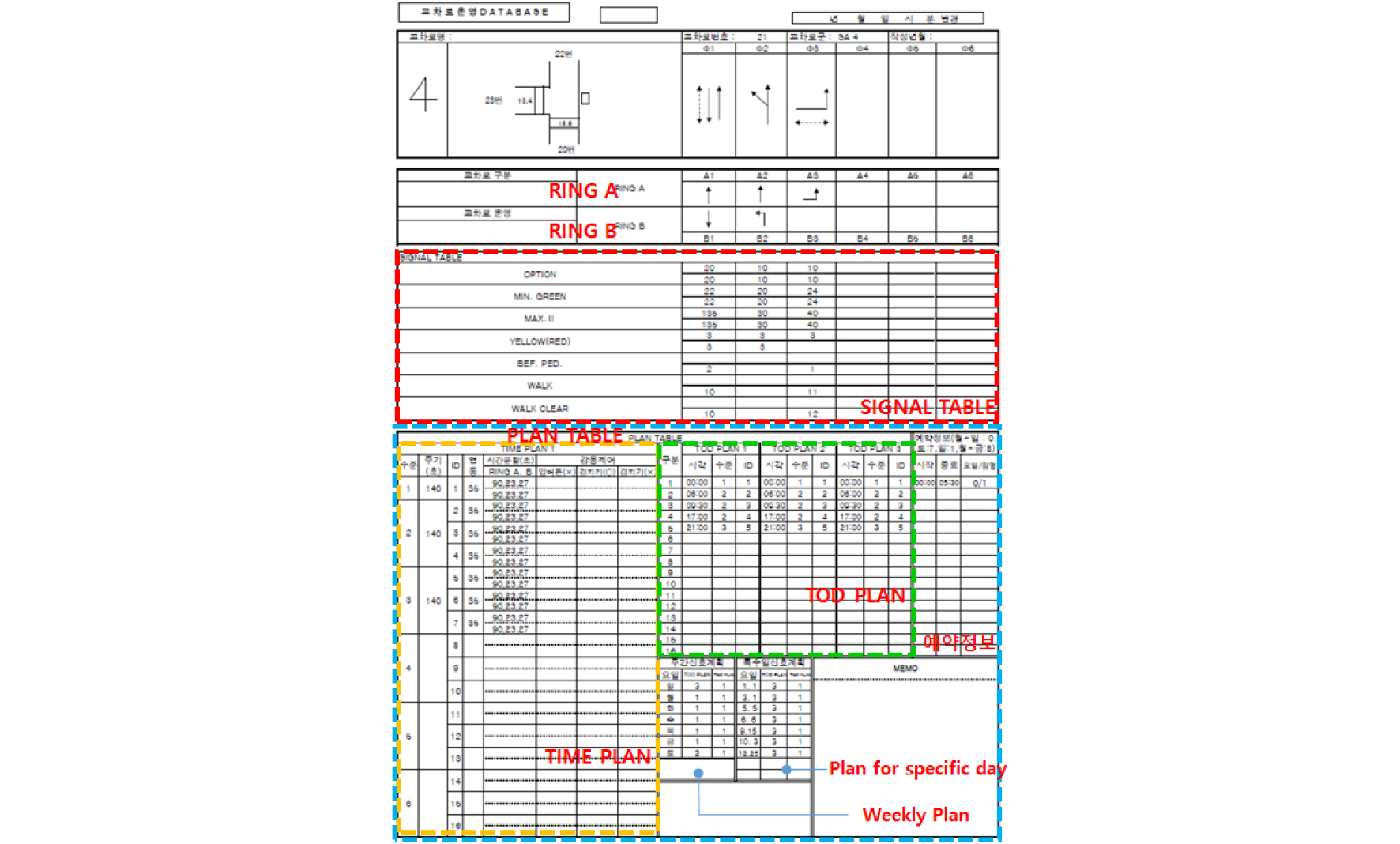
신호등에 의해 교통흐름이 제어되는 교차로는 교차로 신호시간 계획(TOD)을 기반으로 동작한다. TOD에는 현시 운영, 링구성, SIGNAL TABLE, TIME PLAN, TOD PLAN, 주간시간계획, 특수일 시간계획, 예약정보가 포함되어있어 이를 이용하여 SPaT의 신호현시 정보 전송 단위인 movement 별로 정보를 구성할 수 있다.
신호현시 정보를 movement 별로 구성하기 위하여 신호 방향과 출력형태 별로 신호상태와 남은 시간값을 생성해야 하는데, 동일한 시간 값을 갖는 신호상태로 묶여진 현시(Phase)와 방향정보가 정의되어있는 현시 운영정보를 이용하여 movement 별로 구성하고 signalGroup 값을 할당할 수 있다.
각 movement의 신호 지속시간은 TIME PLAN과 SIGNAL TABLE의 값으로 계산할 수 있다. TIME PLAN은 각 현시에 할당된 녹색과 황색의 합산 시간이고 SIGNAL TABLE의 YELLOW 값은 황색 시간이므로 각각의 녹/황색 시간을 계산할 수 있고, SIGNAL TABLE의 WALK와 WALK CLEAR 값으로 보행자 신호의 녹색 시간을 설정할 수 있다. 또한, 각 movement의 적색 시간은 해당 현시가 아닌 타 현시의 시간 분할값의 합으로 계산할 수 있다.
그리고 교통흐름을 다양한 시간계획으로 제어하기 위해 복수의 주기와 시간분할로 운영할 수 있도록 TIME PLAN이 설정되어 ID가 할당되어있고, 시간대별, 요일별, 특수일에 따라 설정된 TIME PLAN의 ID로 현재 시각에서 운영되고 있는 주기와 시간분할을 확인하면 현재의 신호현시 정보를 추출할 수 있다.
3.2. 신호운영계획 DB화
TOD 정보를 이용하여 차량에서 신호현시를 생성할 수 있도록 각 교차로의 신호시간 계획 정보를 9개의 table로 DB화하여 사용한다. intersection table에는 교차로의 이름, 위치 등의 정보를 입력하고 ID를 부여해 해당 교차로의 다른 table 정보를 가져올 수 있는 외래키로 사용하도록 한다. phase_ring table에는 Phase의 RING을 구분하여 movement를 구성하고 signalgroup ID를 할당한다. 각 movement의 상태 지속시간을 계산하기 위해 timeplan과 timeplan_ring table에 TOD 정보를 저장하고, 시간대 별, 날자 별, 특수일, 예약 제어를 위해 todplan, weekplan, reservationplan, specificplan table을 구성하여 TOD 정보를 설정한다. 각 테이블의 설계사항은 다음의 Table 4와 같다.
Table 4.
Database of traffic signal operation plan
3.3. 신호현시 정보 생성
교차로 TOD 정보 DB가 구축된 차량에서의 신호현시 정보 생성은 Fig. 7과 같은 과정을 통해 진행되고, DB의 intersection table에 입력된 교차로 번호를 조회하여 교차로의 신호시간 계획 정보를 읽어와 신호현시 정보를 생성할 수 있다.
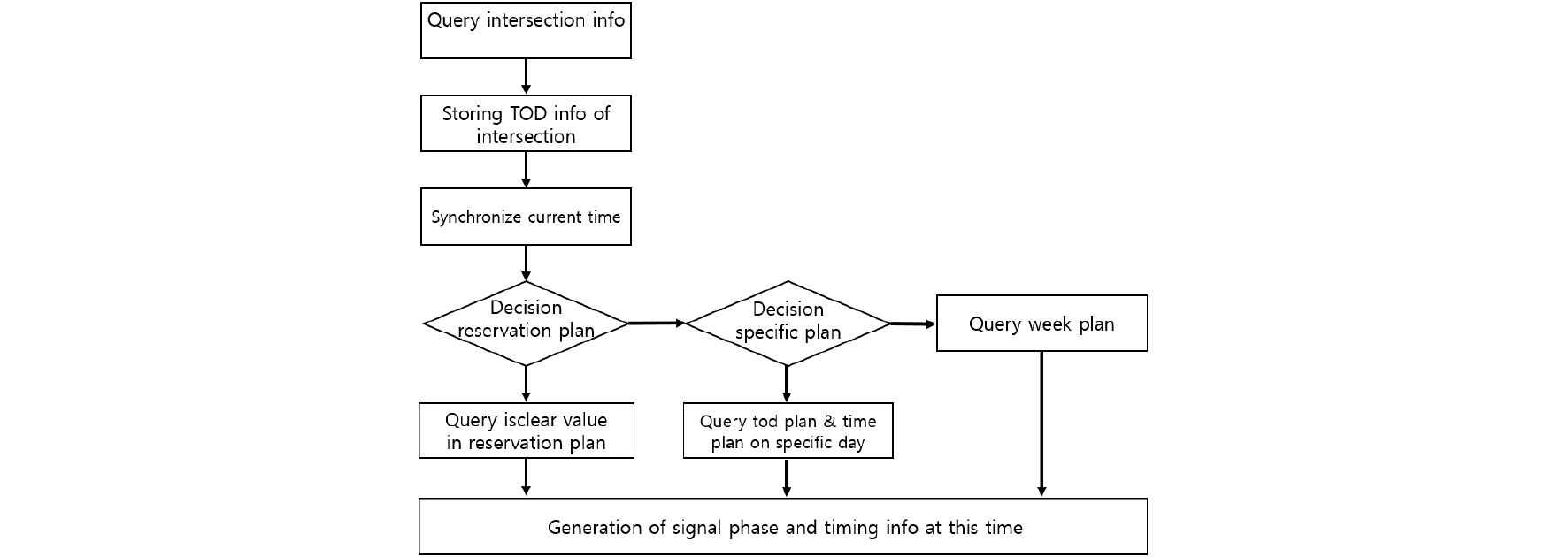
해당 교차로와 현재 시각에서의 신호현시 정보 생성을 위해 DB에 구축된 phase_ring table의 신호종류와 signalGroup ID 정보를 읽어와 해당 교차로의 전체 신호에 대한 신호현시 정보를 movement 별로 구성하여 초기화한다. 다음으로 현재 시각의 신호예약 정보와 특수일 신호계획 및 주간 신호계획에 따른 신호현시 운영 수준에 맞는 각 신호 할당시간과 전체 신호의 주기 정보를 확인하여 각 movement 별로 신호상태(적/청/황)와 다음 현시까지 남은 시간 정보를 계산하여 신호현시 정보를 생성한다.
세종 정부청사 부근 185개 교차로의 신호운영계획 DB 구축 시 데이터 크기는 134 kbyte로 개당 1 kbyte가 되지 않는다. 한편, 100ms 간격으로 전송되는 300 byte의 1개 교차로 SPaT 메시지를 10초간 수신을 가정했을 때 데이터 크기는 29.3 kbyte(30,000 byte)이다. 그러므로 한 교차로의 신호현시 정보를 인지하기 위하여 V2X 시스템을 이용해 실시간으로 수신하는 데이터에 비하여 DB로 구축된 데이터 크기가 훨씬 작기 때문에 TOD를 기반으로 신호현시를 생성하는 방법이 데이터 처리와 메모리 사용 효율이 높고, V2X 통신 불능에 따른 문제가 발생하지 않는 장점이 있을 것으로 판단된다.
4. 시간 지연특성 시험 및 결과 분석
이번 장에서는 현재 구축되어있는 V2X 통신 시스템을 이용하여 제공되는 신호현시 정보의 시간 지연특성과 실제로 운영되고 있는 신호등과 TOD 기반으로 생성된 신호현시 정보의 오차 측정을 통한 시간 지연특성을 분석한다.
4.1. 시험환경
4.1.1. 통신방식(WAVE/LTE)에 따른 시간 지연특성 시험
WAVE와 LTE 통신을 이용해 제공되는 신호현시 정보의 시간 지연특성은 SPaT 메시지가 생성된 시간인 timeStamp 필드 값과 차량 통신단말에서의 메시지 수신시간을 측정해 두 시간의 차를 시간 지연으로 측정할 수 있다. 이때 정확한 시간 지연을 측정하기 위해서는 송수신 장치 간 시간 동기가 정확하게 일치해야 제대로 된 시간 지연특성을 측정할 수 있다.
현재 대전-세종 C-ITS 시범사업에 구축된 노변기지국을 대상으로 WAVE SPaT의 timeStamp 필드값을 이용하여 시간 지연을 측정하였으나 200ms 이상의 값이 나타났다. 이는 SPaT를 생성하여 전송하는 RSU와 메시지를 수신하는 OBU 간의 시간 동기가 맞지않아 발생하는 것으로 판단된다. 또한, LTE 지연 시간 측정에서도 메시지 생성 장치와 OUB 간 시간 동기를 맞추기가 어려울 것으로 판단된다. 그래서 하나의 장치에서 전송한 패킷이 목적지를 거쳐 다시 돌아오는데 소요되는 시간을 측정할 수 있는 네트워크 연결상태 진단도구인 PING을 이용하여 RTT(Round Trip Time)를 측정해 통신 방식에 따른 시간 지연특성을 간접적으로 관찰하였다.
시험에서는 2018년부터 세종에서 진행되고 있는 국토교통부 자율주행기반 대중교통시스템 실증 연구(18)에 사용 중인 V2X 통신시스템을 사용하였다. 본 연구에서는 WAVE와 C-V2X 통신 기반의 수요응답형 대중교통(버스) 자율주행 기술을 개발하는 것으로, 기존에 구축되어있는 WAVE 기반의 C-ITS 인프라와 LTE기반의 신규 서비스를 이용한다. V2X 시스템으로는 기 구축된 WAVE 기반의 노변기지국(RSU), 차량에 설치되는 차량 통신단말(OBU)와 V2X 메시지를 처리하여 서비스하는 서버 등이 있다.
시간 지연 측정에 사용된 OBU는 WAVE와 LTE 통신을 동시에 사용할 수 있는 단말기이다. WAVE 기반의 시간 지연은 WAVE RSU와 OBU 간 통신을 가정하기 위해 WAVE 단말(OBU) 간 RTT를 측정하였고, LTE 기반의 시간 지연은 V2X 메시지 처리서버와 OBU 간 RTT를 측정하였다. OBU와 V2X 메시지 처리 서버는 VPN으로 구성되어 동작하기 때문에 패킷의 암호화와 복호화 시간과 VPN 서버를 통하는 과정에서 발생하는 시간 지연이 포함되어있다. RTT 측정시험은 300byte 패킷을 100ms 간격으로 3시간 동안 측정하였다.
시험에 사용된 OBU는 WAVE 통신에 대한 시험 규격인 USDOT의 CVCOC(19) 규격을 만족한다. CVCOC 규격에는 WAVE 통신 장치의 상호호환성과 성능 요구사항을 만족하는지 확인하기 위해 각 프로토콜 계층에 대한 시험 항목과 절차가 정의되어있다.
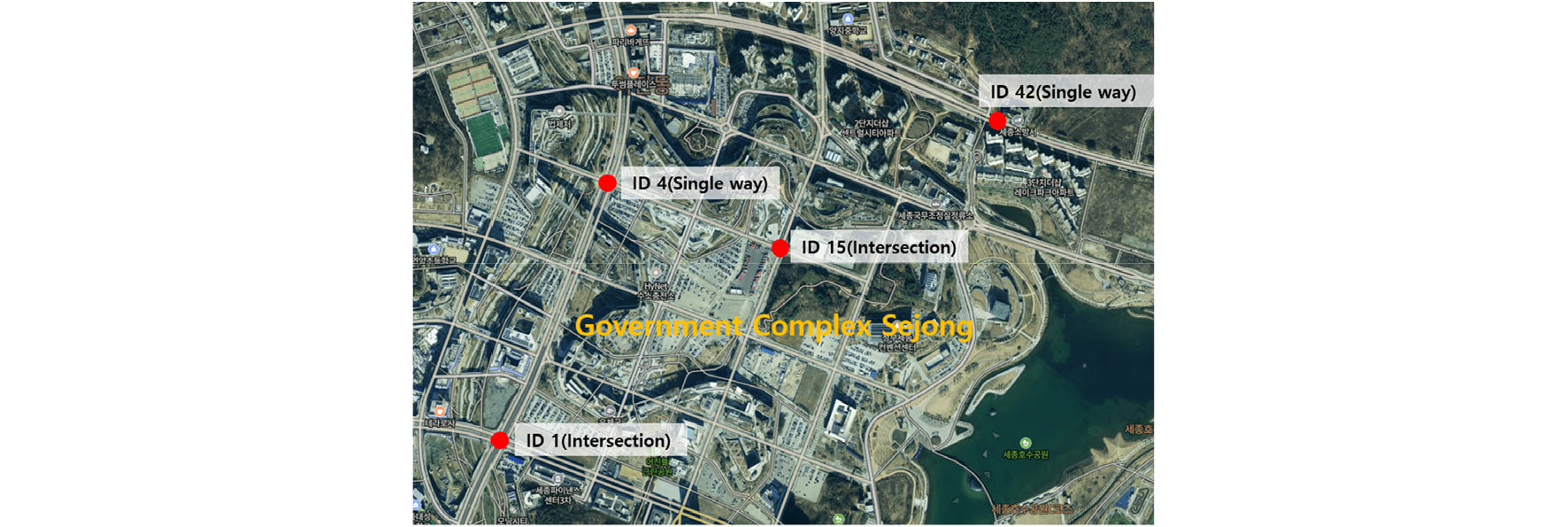
Table 5.
Specification of V2X communication module

4.1.2. TOD 기반 스케쥴링 대비 실제 신호현시 정확도 시험
TOD 기반으로 생성된 신호현시와 실제 신호등에서 운영되고 있는 신호현시의 정확도는 식 (1)과 같이 신호현시 정보의 실시간성이 보장되는 WAVE 기반의 SPaT 메시지를 수신하여 신호가 녹색에서 황색, 황색에서 적색, 그리고 적색에서 녹색으로 상태가 변하는 시점과 TOD 기반으로 계산된 신호현시의 상태 변화 시점 간의 시간차로 오차를 측정한다. SPaT 메시지의 상태 변화 시점이 TOD 기반의 신호현시 상태 변화 시점보다 빠르면 시간 오차는 음수값으로, 느리면 양수값으로 측정된다.
te : 오차 시간
tspat : WAVE SPaT 상태 변화 시간
tt : TOD 상태 변화 시간
WAVE SPaT 메시지 수신은 세종 정부청사 부근의 RSU 4곳에서 진행하였고, 4곳 중 2곳은 교차로, 2곳은 단일로이다. SPaT의 수신 시험은 각 RSU 당 2회, 1시간씩 진행되었다. 각 신호등은 신호의 주기가 신호등마다 다르고 상태 변화 횟수도 달라 각각 약 60~80회 상태 변화의 오차가 측정되었다.
4.2. 시험결과
4.2.1. 통신방식에 따른 시간 지연특성 시험결과
V2X 시스템의 통신방식에 따른 시간 지연특성을 분석하기 위한 RTT 측정 시험 결과는 Table 6과 같다. WAVE 통신을 이용한 RTT 평균은 5.84ms, LTE 통신을 이용한 RTT는 104.15ms로 측정되었다. 우리의 기존 연구(20)에서는 고속으로 이동 중인 차량에서 WAVE 통신을 이용한 RTT 측정결과, 전송 패킷의 크기에 따라 2~8ms로 측정되었고 300byte의 경우 평균 3ms로 측정되었다. 또한, 도로교통공단이 LTE 통신을 이용하여 측정한 신호현시 정보의 지연 시간은 1~3초로 측정되었고, 개선된 방식으로 평균 0.1초로 측정되었다.(15)
Table 6.
RTT measurement value according to communication method
|
WAVE [msec] |
LTE [msec] | |
| Average | 5.84 | 104.15 |
| Standard deviation | 1.51 | 28.76 |
| Max value | 30.2 | 703 |
| Min value | 3.24 | 38.7 |
평균적으로 두 가지의 통신방식 모두 자율주행 시스템이 활용하기에 실시간 신호현시 정보제공이 가능할 수도 있다고 판단할 수 있다. 그러나 LTE 통신을 이용하여 측정한 RTT의 경우 최대 703ms가 발생하였고, 3시간 동안의 시험에서 500ms 이상의 지연 시간이 총 5회 발생하였다. LTE 통신의 경우 통신망의 트래픽 상태에 따라 지연시간이 크게 발생할 수도 있고, 이에 따라 안정성에 매우 민감한 신호현시 정보의 실시간성을 확보하기 어려운 상황이 발생할 수 있을 것으로 판단된다.
4.2.2. TOD 기반 신호현시 대비 실제 신호현시 정확도 측정 시험결과
TOD 기반으로 생성한 신호현시 정보의 정확도 측정결과는 Table 7과 같다. 각 교차로에의 오차는 -0.267~3.762 초가 발생하였고, 신호등 별로 오차값의 수준이 크게 차이가 났다. 이는 전체 교차로에서의 오차값이 C-ITS 메시지의 지연시간 허용값인 100ms 보다 초과하는 값이다. 약 1시간을 관찰한 각 시험에서는 오차의 편차가 약 50ms 내외로 크지 않고 일정한 오차가 유지되는 것을 볼 수 있었지만 Fig. 9와 같이 시간이 지날수록 오차가 증가하거나 감소하는 경향이 나타났다.
Table 7.
Signal phase and timing error: TOD based vs real
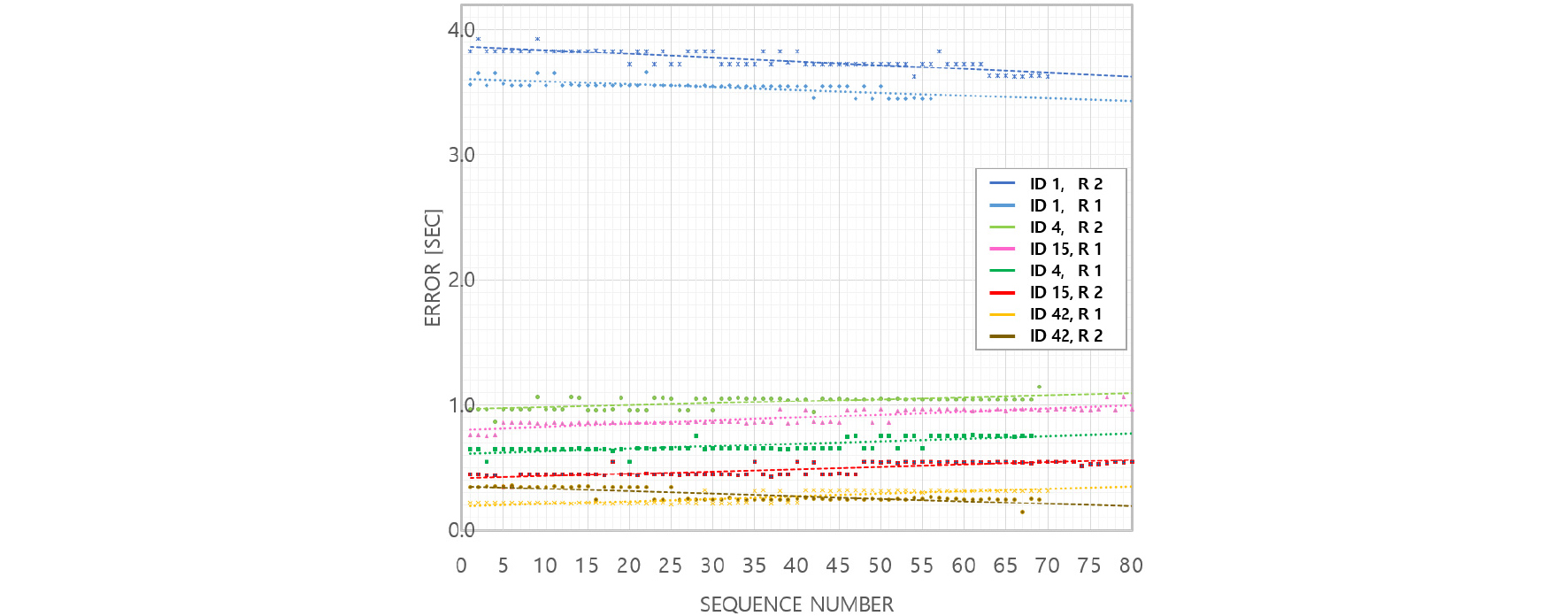
또한, 동일한 신호등을 대상으로 각기 다른 날에 수행한 2차례 시험에서 각 회차 오차 평균값의 차이가 많이 발생하였으며 각 신호등의 오차 증감 수준이 매우 달라 발생하는 오차의 경향성이 있는 것으로 보기는 어려웠고, 장시간 동안 일정한 오차를 유지한다고는 볼 수 없을 것으로 판단된다.
5. 결 론
본 논문에서는 V2X 통신을 이용한 신호현시 정보제공 시스템의 시간 지연특성에 대해 시험하였고 결과를 얻을 수 있었다. WAVE 통신을 이용한 RTT 측정에서는 평균 5.84ms가 측정되어 신호현시 정보의 실시간성이 보장됨을 확인하였지만, 인프라 구축이 필수적이라는 단점이 있다. LTE 통신을 이용한 RTT 측정에서는 평균 104.15ms가 측정되었고 추가의 통신 장치를 구축할 필요는 없지만, 통신망의 트래픽 증가에 따라 실시간성 확보가 어려운 상황이 발생할 수 있을 것으로 판단된다.
또한, V2X 통신 시스템을 이용하지 않고 신호시간 계획(TOD)을 기반으로 신호현시 정보를 생성할 수 있는 방법을 제안하였다. TOD 기반으로 신호현시 정보를 생성하면 V2X 통신을 이용하여 신호현시 정보를 제공받을 필요가 없어 통신 불능으로 발생하는 문제에 자유롭고, 하나의 교차로에 대하여 실시간으로 제공받는 신호현시 정보의 크기보다 신호현시 정보 생성을 위해 구축한 TOD DB의 데이터 크기가 훨씬 작아 데이터 처리와 메모리 사용 효율이 높다는 장점이 있다.
세종정부청사 부근의 교차로 4곳을 대상으로 TOD 기반으로 생성한 신호현시 정보의 정확도 측정 결과는 최소 -0.267초, 최대 3.762초의 오차가 발생하였고 오차 발생의 경향성을 발견하기는 어려웠다. 그러므로 본 논문에서 제안한 TOD 기반의 신호현시 정보 제공방법은 신호제어기 시스템의 정확도를 높인다면 이미지 센싱 또는 V2X 통신 없이 자율주행 시스템에서 안정적으로 신호현시 정보의 인지가 가능할 것으로 판단된다.
