

1. 서 론
최근 자동차 업계에서는 조건부 자동화 시스템인 자율주행 레벨 3 단계 상용화를 준비하고 있다. 자율주행 레벨 3 단계는 자율주행 기능을 수행하며, 시스템 요청이 발생하지 않는 대부분의 경우에서 자율 주행한다. 자율 주행의 경로 추종을 위해서는 다양한 모델 기반 제어 알고리즘에 비교적 정확한 수학적 모델과 매개변수가 필요하다. 모빌리티 매개변수는 환경이나 시스템 상태 변화에 따라 변화할 수 있다. 이러한 한계를 극복하기 위해 다양한 연구들이 진행되고 있다, Liu, Q. 등(1)은 복잡한 주행 작업을 정확하고 강건하게 수행할 수 있도록 인공 흐름 유도(AFG) 개념 기반의 간단한 고정 이득을 지닌 4WS(4륜 조향) 제어기 설계 방식을 제안한다. Junhui. W(2) 등은 비선형 4WS 차량에 대한 정확한 수학적 모델 설계가 어려운 문제를 해결하기 위해 데이터 주도 기법으로 모델 없는 적응 제어 방식을 제안한다. 경로 추종 제어기로 모델 예측 제어(MPC)기를 이용하는 다수의 논문이 확인되는 가운데, Rokonuzzaman. M(3) 등은 정확한 차량 동적 모델을 갖춘 MPC를 제안하고, Ying. T(4) 등은 실시간 타이어 강성이 식별되는 MPC 알고리즘을 제안한다. Zejiang.W(5)등은 모델 독립 제어를 위한 Ultra-Local MPC를 제안하였다. Ahmed. A(6) 등은 궤적 방향 각도의 갑작스런 변화를 처리하기 위해 인간의 행동을 모방하는 새로운 제어 알고리즘을 제안한다.
본 연구에서는 매개변수 변화로 인한 제어 성능 저하를 극복하기 위해 제어 오차와 입력만을 이용하는 입력 결합 동적 오차 모델을 설계한다. 설계된 오차 동적 모델의 계수는 다중 망각 인자를 이용하는 순환 최소 자승법으로 실시간 추정된다. 추정된 계수는 경로 추종을 위한 조향 제어 입력 도출에 사용되며, 알고리즘은 시스템의 매개변수 없이 경로를 추종하게 한다.
논문의 남은 부분은 다음과 같이 구성되었다. 2장에서는 파라미터 독립 적응 경로 추종 제어 알고리즘에 대해 설명하고, 3장에서는 성능 평가 결과에 대해 기술한다. 마지막 4장에서는 결론과 함께 한계점 분석 및 향후 연구 계획에 대해 기술한다.
2. 파라미터 독립 적응 경로 추종 제어 알고리즘
Fig. 1은 자율주행 경로 추종을 위한 파라미터 독립 적응 조향 제어 알고리즘의 블록선도이다.
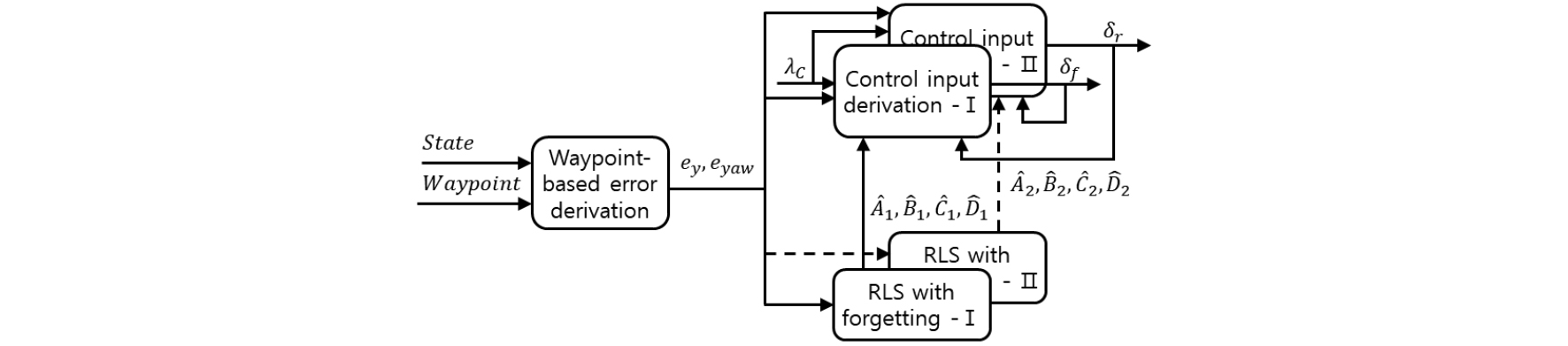
2.1. 결합 오차 동역학 모델 설계 및 계수 추정
본 연구에서 적응형 전륜 및 후륜 조향 제어 입력을 도출하기 위해 설계한 결합 오차 동역학 모델은 식 (1)과 같다. 경로 추종 오차의 변화율은 오차와 제어 입력 그리고 외란항에 의해 결정된다는 가정과 제어 입력 도출을 위해 변형된 결합 동적 모델의 형태이다.
식 (1)의 와 는 각각 자율주행 모빌리티의 경로 추종 오차인 횡방향 오차와 요 각속도 오차이고, 와 는 각각 전후륜 조향각을 의미한다. 는 본 연구에서 사용된 두 개의 순환 최소 자승 알고리즘을 이용해 추정되는 오차 동역학 모델의 계수들이다. 설계된 오차 동역학 모델이 자율주행 모빌리티의 오차 동역학 모델을 합리적으로 나타낼 수 있도록 등가 계수들이 추정되었다. 추정을 위해 정의된 출력과 추정 상태량 간의 관계식은 다음과 같다.(7)
앞선 식 (2)와 (3)에서 정의된 관계식을 이용해 추정된 계수들은 경로 추종을 위한 자율주행 모빌리티의 전륜 및 후륜 조향 제어 입력 도출에 사용된다. 제어 입력의 구체적 도출 과정은 다음 절에서 기술한다.
2.2. 전륜 및 후륜 조향 제어 입력
랴푸노프 직접법(Lyapunov direct method) 기반 자율주행 모빌리티의 경로 추종 조향 제어 입력을 도출하기 위해 다음과 같은 비용 함수가 정의되었다.
식 (4)에서 정의된 비용함수의 시간에 대한 도함수를 도출하면 다음 식 (5)와 같이 정리될 수 있다.
식 (5)에 식 (1)에서 정의된 오차 동역학 식을 대입하면서 다음 식 (6)과 같은 조건이 성립될 수 있는 제어 입력을 설계하였다. 이를 통해 정의된 비용함수는 안정성을 확보할 수 있고, 이는 경로 추종 오차를 안정적으로 0으로 수렴시킬 수 있다는 것을 의미한다.
본 연구에서는 식 (6)에서 정의된 조건식을 만족시키기 위한 전륜 및 후륜 조향 제어 입력을 다음 식과 같이 설계하였다. 도출된 제어 입력은 자율주행 모빌리티가 정해진 목표 경로를 안정적으로 추종할 수 있도록 하는 적응형 제어 입력이며, 각 제어 입력은 다른 제어 입력에 의해 영향을 받도록 설계되었다.
다음 장에서는 본 연구에서 제안하는 적응형 경로 추종 제어 알고리즘의 성능 평가 결과에 대해 기술한다.
3. 성능 평가
본 논문에서 제안하는 알고리즘의 성능을 확인하기 위해 CarMaker를 이용하여 시뮬레이션을 수행하였다. 현 단계에서 제안하는 경로 추종 제어 알고리즘은 전륜 및 후륜의 조향 제어에 초점을 두어 개발되었으며. 따라서 목표 경로 주행을 위한 페달 입력은 CaMaker 운전자 모델의 페달 입력을 이용하였다. 운전자 모델은 목표 주행 속도인 40 km/h를 등속 주행하도록 설정되었다. 범용 적용성 확인을 위해 주행 경로는 두 가지 차량과 곡률 반경이 다른 S 곡선 도로를 주행하는 시나리오가 비교되었다. 상세한 성능 평가 시나리오는 Table 1에 나타내었다. Scenario 1은 비교적 축거가 짧고 질량이 작은 차량이 큰 곡률 반경이 적용된 S 곡선 시나리오에서 주행한다. Scenario 2는 비교적 축거가 길고 질량이 큰 차량이 작은 곡률 반경 도로에서 주행한다. Fig. 2는 각 시나리오에 대하여 구성된 환경, Table 2는 선정된 각 차량의 제원을 보여준다.
Table 1.
Evaluation scenario
| Division | Radius of curvature (m) | Vehicle |
| Scenario 1 | 100 | Model-A |
| Scenario 2 | 50 | Model-B |
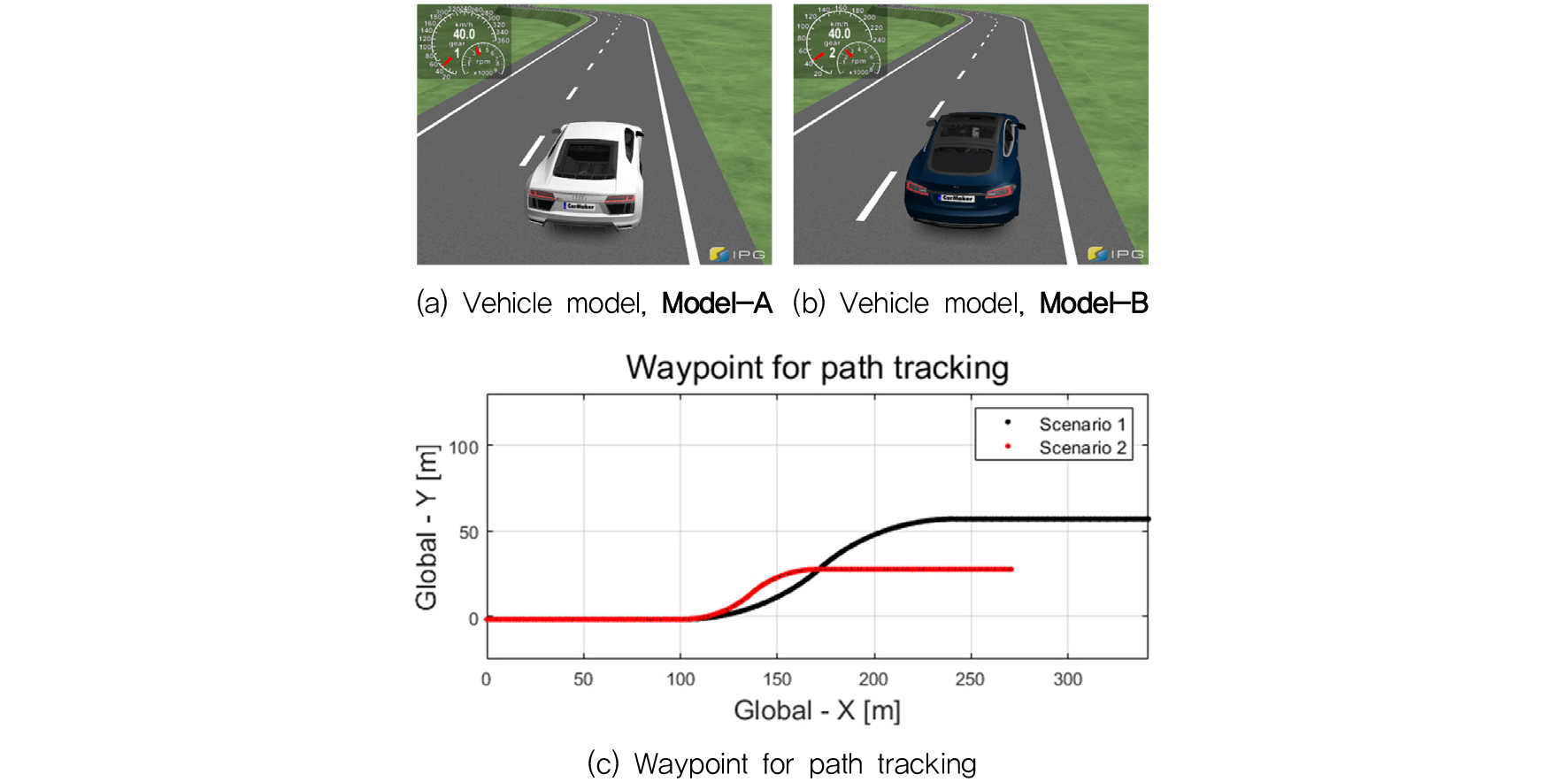
Table 2.
Vehicle parameters
| Parameter | Unit | Vehicle | |
| Model-A | Model-B | ||
| Mass | kg | 1,644 | 2,108 |
| Wheel base | m | 2.750 | 2.975 |
|
Distance (front axle-mass center) | m | 1.410 | 1.744 |
|
Distance (rear axle-mass center) | m | 1.340 | 1.231 |
망각인자를 이용하는 순환 최소 자승 알고리즘의 파라미터들은 Table 3에 나타내었다. 결합 동적 모델 식 (7)과 (8)의 계수들 추정 및 Scenario 1, 2에서 모두 동일한 파라미터가 적용되었고, 초기값 등 파라미터에 비교적 민감하게 반응하지 않는 결과를 확인하였다.
Table 3.
Parameters for RLS with forgetting
| Parameter () | Value |
| Forgetting factor ( = 1.2) | 0.9999 |
| Initial estimate ( = 1.2) | 0 |
| Initial covariance ( = 1.2) | 0.0001 |
Fig. 3은 Scenario 1에서의 성능 평가 결과이다. Fig. 3의 (a)는 전륜/후륜 조향 제어 입력이며, 약 8.5 sec부터 25 sec 구간에서 목표 경로를 추종하기 위하여 원점 대칭 형상의 조향각이 계산되는 모습을 보여준다. 후륜 조향 제어 입력의 경우 S 곡선로 진입시에는 역위상으로 이후로는 동위상 조향으로 계산되고 있다. Fig. 3의 (b)와 (c)는 횡방향 속도와 요 각속도로 곡선 구간 주행 시 각각 최대 약 5.5 m/s, 6.3 deg/s 크기를 확인할 수 있다. (d)와 (e)는 질량 중심에서의 횡방향 오차와 요 각도 오차이다. 직진 구간에서는 비교적 작고 변화가 없지만. 곡선 구간에서는 변화하는 결과를 보여준다. (f)와 (g)는 순환 최소 자승 알고리즘을 이용하여 식 (7)과 (8)에서 추정된 계수 결과를 보여준다. 전륜 제어 입력 식에서 추정되는 계수 의 변화량이 가장 크고, 예견 지점 횡방향 오차와 곱해지는 계수 이 다음으로 크게 변화하는 결과를 보여준다. (h)는 차량 주행 경로를 보여주며, 합리적으로 목표 경로를 추종하는 결과를 확인할 수 있다.
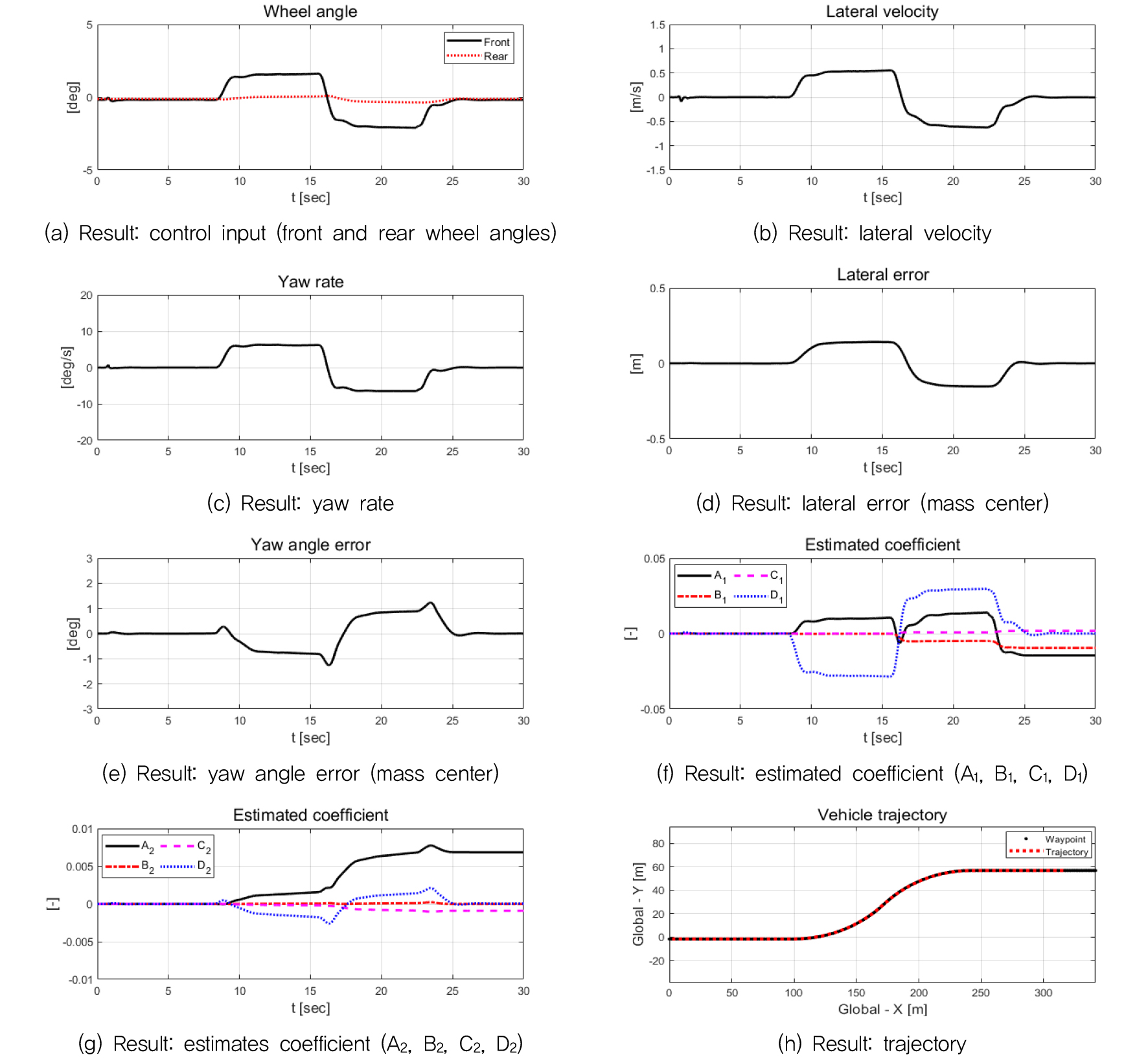
Fig. 4는 상대적으로 선회 반경이 작은 Scenario 2에서의 성능 평가 결과이다. Fig. 4의 (a)는 전륜/후륜 조향 제어 입력이며, 곡률 반경 감소에 따라 Scenario 1보다 큰 값으로 계산되는 모습을 보여준다. 전륜 조향 입력이 상대적으로 우세하게 계산되고 있으며 이는 후륜 조향 제어 입력이 조향 보조의 역할을 수행하는 것으로 설명할 수 있다. Fig. 4의 (b)와 (c)는 횡방향 속도와 요 각속도, (d)와 (e)는 질량 중심에서의 횡방향 오차와 요 각도 오차이다. Fig. 4의 (f)와 (g)는 식 (7)과 (8)에서 추정된 계수 결과를 보여준다. 모두 직진 구간에서는 0 근처의 비교적 작은 값이지만. 곡선 구간에서는 Scenario 1과 비교하여 더 큰 값이며, 진동하는 결과를 보여준다. 이는 긴 축거를 갖는 차량으로 작아진 곡률 반경을 주행하기 위해 조향 입력을 더욱 민감하게 조절하는 결과로 설명할 수 있다. Fig. 4의 (h)는 목표 경로와 차량 주행 경로를 보여주며, 상대적 선회 반경이 작은 주행 환경에서도 합리적으로 목표 경로를 추종하였음을 확인할 수 있다.
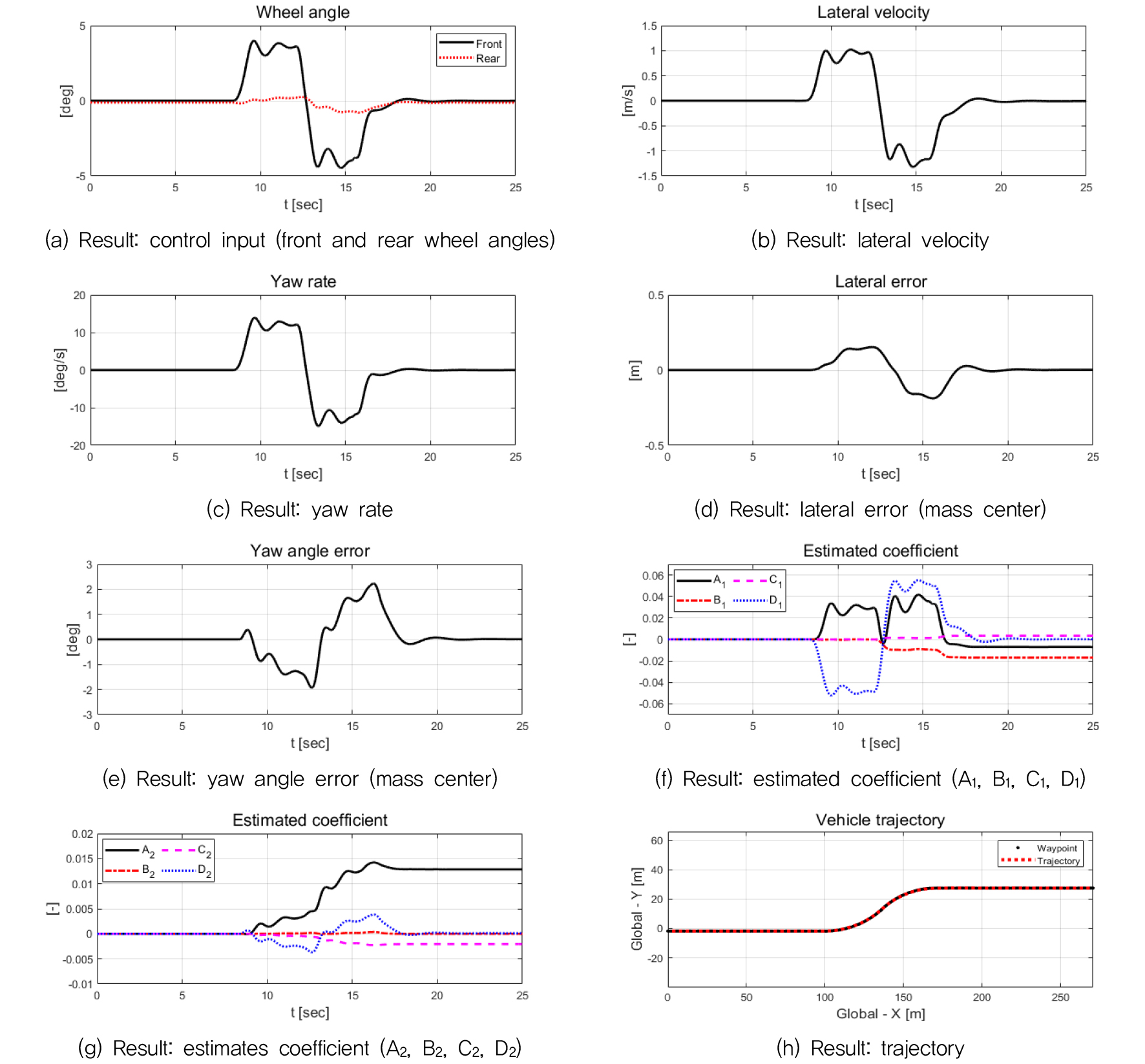
Table 4는 Scenario 1과 Scenario 2의 주행 중 경로 오차 비교 결과를 보여준다. 오차는 제곱 평균 제곱근(RMS)으로 비교 분석되었다. [4]에서의 적응형 모델 예측 제어기 기반 경로 추종 성능 평가 결과 중 횡방향 오차의 평균 결과가 0.2 m, 헤딩 각도 오차의 평균 결과가 0.8 deg 수준으로 확인되었다. 이를 통해 제안하는 결합 동적 모델을 이용하는 시스템 파라미터 독립 적응 조향 제어 알고리즘은 서로 다른 두 차량과 도로에서 기존 연구 조사와 유사한 오차 수준을 가지며 합리적으로 경로를 추종하였음을 확인할 수 있다.
4. 결 론
본 연구에서는 자율 주행 경로 추종을 위한 파라미터 독립 적응 조향 제어 알고리즘을 제안하였다. 파라미터 독립을 위하여 본 연구는 제어 오차와 입력으로 구성된 결합 모델을 설계하였다. 설계된 모델의 계수를 다중 망각인자를 이용하는 순환 최소 자승법으로 실시간 추정하였다. 추정된 결합 동적 모델의 계수는 조향 제어 입력을 도출하는데 이용된다. 제어 입력은 랴푸노프 직접법을 기반으로 도출되었으며, 비용함수는 제어 오차로 설계되었다. 즉, 제안하는 경로 추종 제어 알고리즘은 시스템과 관련된 복잡한 동적 모델이나 파라미터 또는 오프라인 학습 없이 몇 가지 제어 파라미터만을 이용하여 실시간으로 경로 추종 제어를 수행할 수 있다. 제안하는 알고리즘의 성능 검증을 위하여 Matlab/Simulink-CarMaker 환경에서 평가를 수행하였다. 비교적 선회 반경이 상대적 크고 작은 시나리오를 설정하여 주행 평가를 진행하였으며, 두 시나리오 모두에서 경로를 이탈하는 문제없이 합리적으로 목표 경로를 추종하는 결과를 확인하였다. 그럼에도, 선회 반경이 상대적 작은 도로에서 주행하는 결과의 선회 구간에서 횡방향 오차의 진동 경향을 확인할 수 있다. 순한 최소 자승법의 경우 초기치와 망각 인자에 의한 민감도 특성이 존재한다. 그러므로 향후 횡방향 거동 안정성을 향상시킬 수 있는 추정 및 제어 알고리즘 고도화를 계획하고 있으며 다양한 시나리오에서 제안된 알고리즘의 범용성 평가와 함께 실 모빌리티 적용을 위한 평가 환경의 확장을 계획하고 있다.
