

1. 서 론
2. 차량 모델링
2.1. Ackermann steering model
2.1. Ackermann steering model
3. 확장칼만필터 기반 차량 상태 추정기 모델링
3.1. 모델링
3.2. 이산화(discretization)
4. 실험 환경
4.1. 자율주행 차량 구성
4.2. 실험 시나리오
5. 결 과
5.1. 자동긴급제동(AEB) 시나리오 결과
5.2. 차선 변경(LC) 시나리오 결과
5.3. 차선 유지(LK) 시나리오 결과
6. 결 론
1. 서 론
최근 자율주행 기술의 발전으로 선행 차량과의 안전 거리를 유지하는 적응형 순향 제어 장치(adaptive cruise control) 시스템과 의도하지 않은 차선 이탈을 방지하고 차량을 차선 경계 내에 위치하도록 하는 차선 유지 시스템(lane keeping assistant system)이 상용화되었다. 차량이 자체적으로 판단하여 차선 변경을 할 수 있게 하는 능동형 차선 변경(active lane change) 기술에 대한 연구도 활발히 진행되고 있다. 이러한 자율주행 시스템이 안정적인 제어를 통해 탑승객의 안전을 확보하고 편안한 승차감을 제공하기 위해서는 자 차량의 정확한 상태 추정이 필요하다.
차량이 감속하거나 가속하는 상황에서는 차량의 네 휠(wheel)에 슬립(slip)이 발생하게 된다. 이러한 상황에서 차량 chassis CAN(controller area network)을 통해 수신하는 종방향 속도, 종방향 가속도, 요 각속도 등에 오차가 발생한다. 특히 차량이 급격히 감속하여 정지했다가 다시 출발하는 상황에서 차량이 정지했음에도 불구하고 요 각속도 값이 0으로 추정되지 않고, 출발 시에 요 각속도 값이 급격히 크게 추정되는 등의 문제가 발생한다.
김범준 등은 종방향 속도, 종방향 가속도, 요 각속도를 측정값으로 사용하여 종방향 속도, 종 방향 가속도, 요 각속도, 요 각가속도를 추정하는 확장칼만필터(extended Kalman filter)를 제안하였다.(1) Antonov등은 종방향 속도, 횡방향 속도, 요 각속도, 네 휠 속도, road grip coefficient를 측정값으로 사용하여 횡방향 가속도, 요 각속도, 네 휠 속도를 추정하는 무향칼만필터(unscented Kalman filter)를 제안하였다.(2)
본 논문에서는 확장칼만필터를 사용하여 휠 슬립에 강건한 상태추정기를 제안한다. 차량 모델로는 Ackermann model을 사용하였다. 측정값으로 차량 chassis CAN이 제공하는 네 휠 속도, 요 각속도, 종방향 가속도, 조향각을 이용하여 차량의 종방향 속도, 종방향 가속도, 요 각속도를 추정한다. 조향각 측정값의 유무가 차량 상태 추정에 미치는 영향을 알아보고 차량 종방향 slip에 어떠한 영향을 끼치는지 알아보기 위해 위해 조향각을 측정값으로 사용하는 필터와 그렇지 않은 필터를 각각 구성하여 비교해 보았다. 자율주행 로직에 개발한 필터를 적용하여 자동긴급제동(AEB), 차선 변경(LC), 차선 유지(LK) 상황에서 실험을 진행하였다.
2. 차량 모델링
2.1. Ackermann steering model
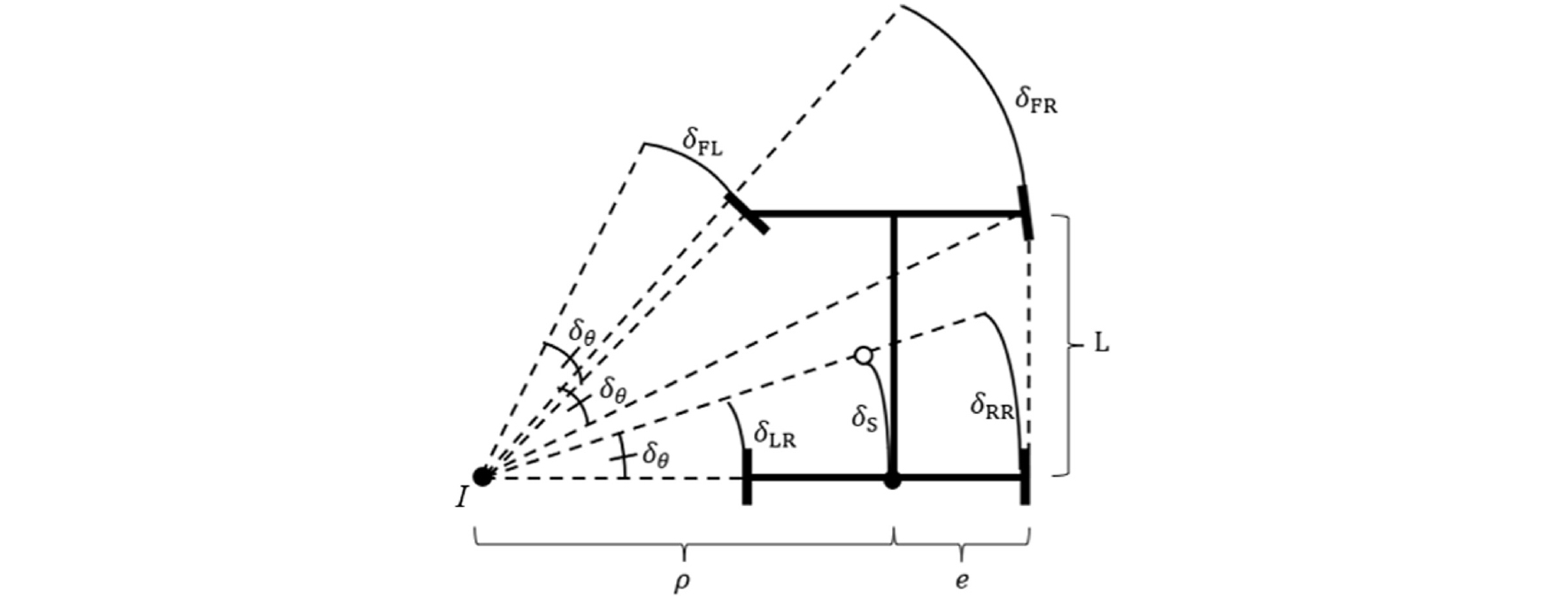
본 논문에서 차량의 선회를 모델링하기 위해 고속주행을 하지 않는 자율주행차의 특성을 고려하여 Ackerman steering model을 사용하였다.(3) 저속 상황을 가정한 본 모델에서는 각 타이어에 작용하는 횡방향 힘을 무시하여 타이어가 순수한 롤링 동작을 수행함을 가정한다. Fig. 1과 같이 차량이 점 I를 중심으로 반시계 방향으로 선회함을 가정할 때 각 휠의 변위는 식 (1)과 같이 계산된다.
2.2. Bicycle model
차량의 횡방향 거동을 모사하는 모델 중 하나인Bicycle 모델은 두 전륜 휠과 두 후륜 휠을 각각 하나의 휠로 가정한다. 전륜 휠과 후륜 휠의 조향각을 각각 δF, δR라 하고, 차량의 휠 베이스를 L, slip angle을 β, 요 각도를 ψ라 하면 식 (2)와 같다.(4)
β와 δF가 작다고 가정하고, δR=0이라고 하면 δF는 아래 식 (3)과 같다.
3. 확장칼만필터 기반 차량 상태 추정기 모델링
3.1. 모델링
본 논문에서는 차량의 종방향 속도, 종방향 가속도, 요 각속도와 같은 차량 상태를 추정하기 위해 가우시안 백색 잡음(Gaussian white noise)을 가정하고 확장칼만필터를 구성하였다. 상태벡터는 식 (4)와 같다.
식 (4)에서 vx는 종방향 속도, γ는 요 각속도, ax는 종방향 가속도, 는 요 가속도, ba는 종방향 가속도 편차(bias), bγ는 요 각속도 편차를 가리킨다. 측정값은 차량 chassis CAN에서 얻어지는 네 휠 속도, 요 각속도, 종방향 가속도, 조향각을 사용하였고, 측정 벡터는 식 (5)와 같다.
식 (5)에서 wrl은 후륜 좌측 휠 속도, wrr은 후륜 우측 휠 속도, wfl은 전륜 좌측 휠 속도, wfr은 전륜 우측 휠 속도, δ는 조향각을 나타낸다.
종방향 가속도와 요 가속도의 시간 미분을 모션 모델의 잡음으로 가정하면 모션 모델을 식 (6)과 같이 나타낼 수 있다.
측정 모델을 구하기 위해 식 (1)을 시간으로 미분하면 각각의 휠 속도는 식 (7)과 같다.
따라서 확장칼만필터의 측정 모델은 식 (8)과 같이 구성할 수 있다. 식 (8)의 gr은 기어비를 의미한다.
3.2. 이산화(discretization)
테일러 전개를 사용하면 식 (6)과 같은 연속 모델을 식 (9)와 같이 이산화 할 수 있다.(5)
Δt는 샘플링 시간으로 chassis CAN의 샘플링 시간에 맞춰 0.02초로 설정하였다. 위와 같은 모션 모델로 식 (10)과 같이 재귀적으로 상태 와 추정 오차 공분산 Pk를 구할 수 있다.
4. 실험 환경
4.1. 자율주행 차량 구성
본 연구에서는 현대자동차 카운티 EV, 일렉시티 모델을 기반으로 한 자율주행 차량을 사용하였다. 차량의 절대 위치와 상태를 계측하기 위해 각 차량에는 고정밀 GPS를 장착하였다. 카운티 EV차량은 Septentrio社의 GPS를, 일렉시티 차량은 OXTS 社의 RT-3000 GPS를 사용한다. GPS의 계측값은 이더넷 통신을 통해 차량 내 자율주행용 PC에 데이터가 전송된다. 자율주행용 PC는 차량 chassis Can과 연결되어 자차량의 요 각속도, 종방향 속도 등의 계측값을 수집한다.

4.2. 실험 시나리오
본 연구에서는 자동긴급제동(AEB), 차선 변경(LC), 차선 유지(LK) 세 가지 시나리오에서 실험을 진행하였다. chassis CAN이 제공하는 조향각이 측정값으로 주어질 때와, 주어지지 않을 때의 차이를 비교하기 위해 위에서 구성한 확장칼만필터 측정 모델에서 조향각 δ을 제외한 상황과 제외하지 않은 상황에서 실험을 진행하여 비교하여 보았다.
자동긴급제동(AEB) 시나리오는 자율주행 차량이 15km/h에서 급 정거하는 시나리오로, 휠 슬립이 발생하는 상황에서 상태 추정 성능을 알아보기 위해 진행되었다. 차선 변경(LC) 시나리오는 차선 변경 시에 상태 추정이 잘 되는지 알아보기 위해 진행되었으며, 종방향 목표 속도 (vx)는 30km/h로 설정하였다. 차선 유지(LK) 시나리오는 차량이 선회할 때 상태 추정 성능을 알아보기 위해 진행하였고 종방향 목표 속도 (vx)는 50km/h로 설정하였다.
5. 결 과
5.1. 자동긴급제동(AEB) 시나리오 결과
현대자동차 일렉시티 차량으로 자동긴급제동(AEB) 시나리오에 대해 실험한 결과는 Fig. 3과 같다. 확장칼만필터 측정 모델에서 조향각(δ)을 제외한 상황에서는 차량이 정지 후 출발할 때 슬립으로 인해 요 각속도가 급격히 큰 값으로 추정하는 현상이 발생하였다. 조향각 δ을 제외하지 않은 상황에서는 정지했다가 출발할 때 조향각이 slip을 보정하여 요 각속도가 급격히 큰 값으로 추정하는 현상이 개선되었다.
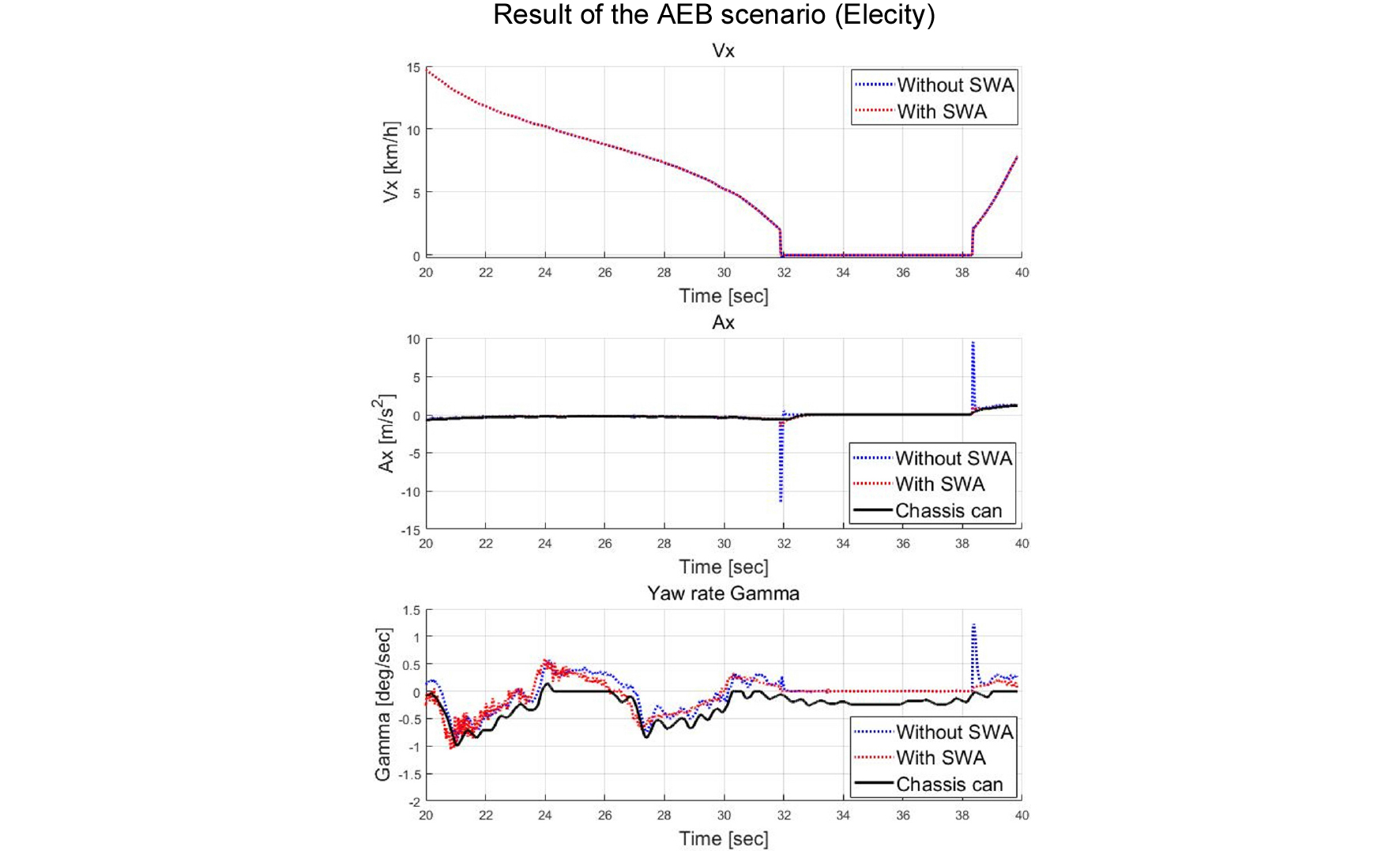
일렉시티 차량은 차량 휠속이 2km/h 미만일 때, 휠슬립과 잡음으로 인해 chassis CAN에서 휠속을 0km/h로 추정하는 특성이 있다. 따라서 감속 시에 휠속이 2km/h 미만에서 0km/h로 추정됨으로써 조향각 δ를 측정값에서 제외하였을 때는 가속도가 급격히 크게 추정되거나, 급격히 작게 추정되는 문제가 발생한다. 조향각 δ을 측정값에서 제외하지 않았을 시에는 이러한 현상이 개선된 것을 Fig. 3에서 확인할 수 있다.
5.2. 차선 변경(LC) 시나리오 결과
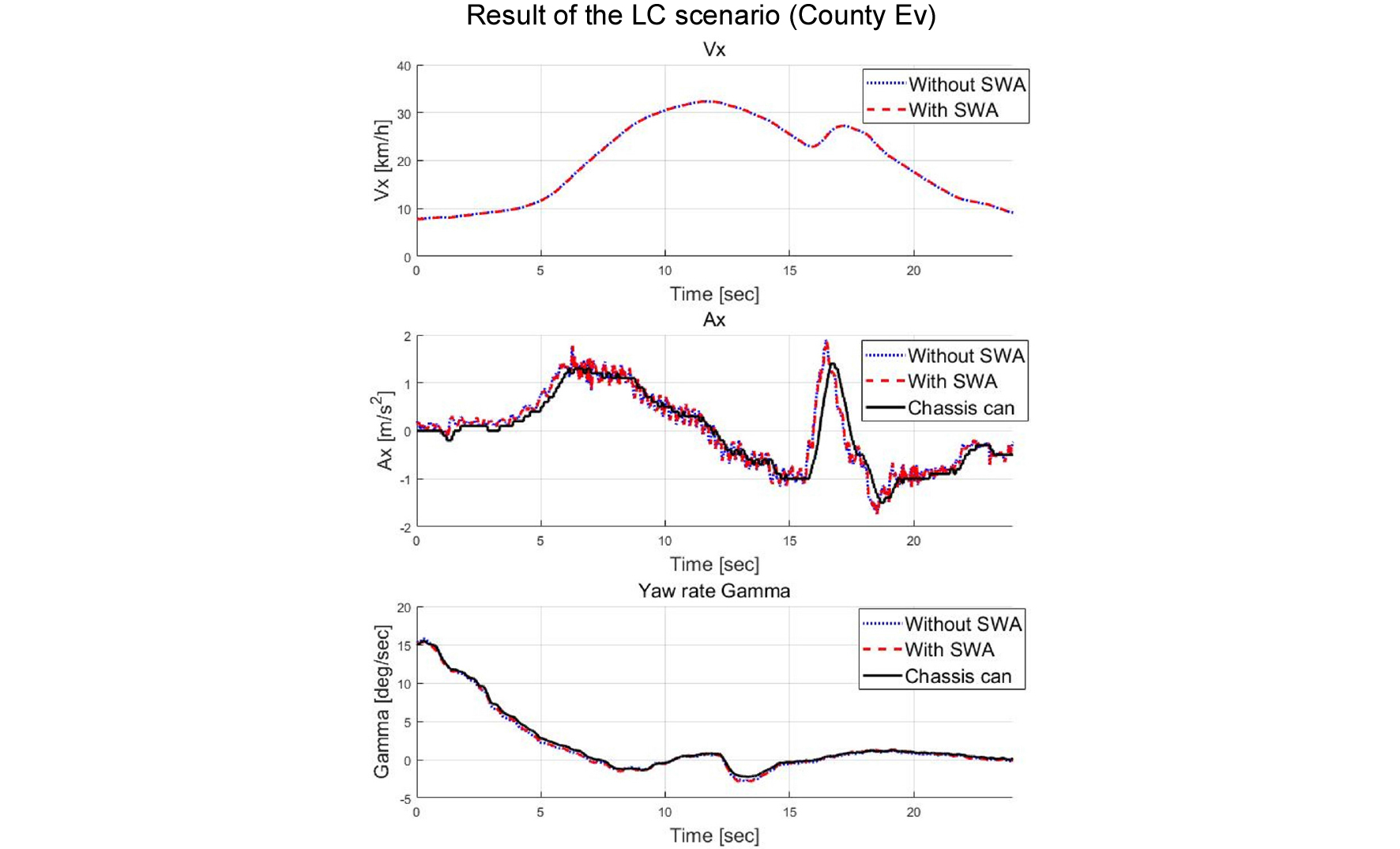
현대자동차 카운티 EV 차량으로 차선 변경(LC) 시나리오에 대해 실험한 결과는 Fig. 4와 같다. Fig. 4에서 볼 수 있듯이, 조향각의 측정값으로의 사용 유무 여부에 따른 결과의 차이가 미미하였다.
5.3. 차선 유지(LK) 시나리오 결과
현대자동차 일렉시티 차량으로 차선 유지(LK) 시나리오를 실험한 결과는 Fig. 5와 같다. Fig. 5에서 볼 수 있듯이, 조향각을 측정값으로 사용할 때 종방향 가속도 (Ax)의 추정 결과에 잡음을 줄이는 효과가 있었다.
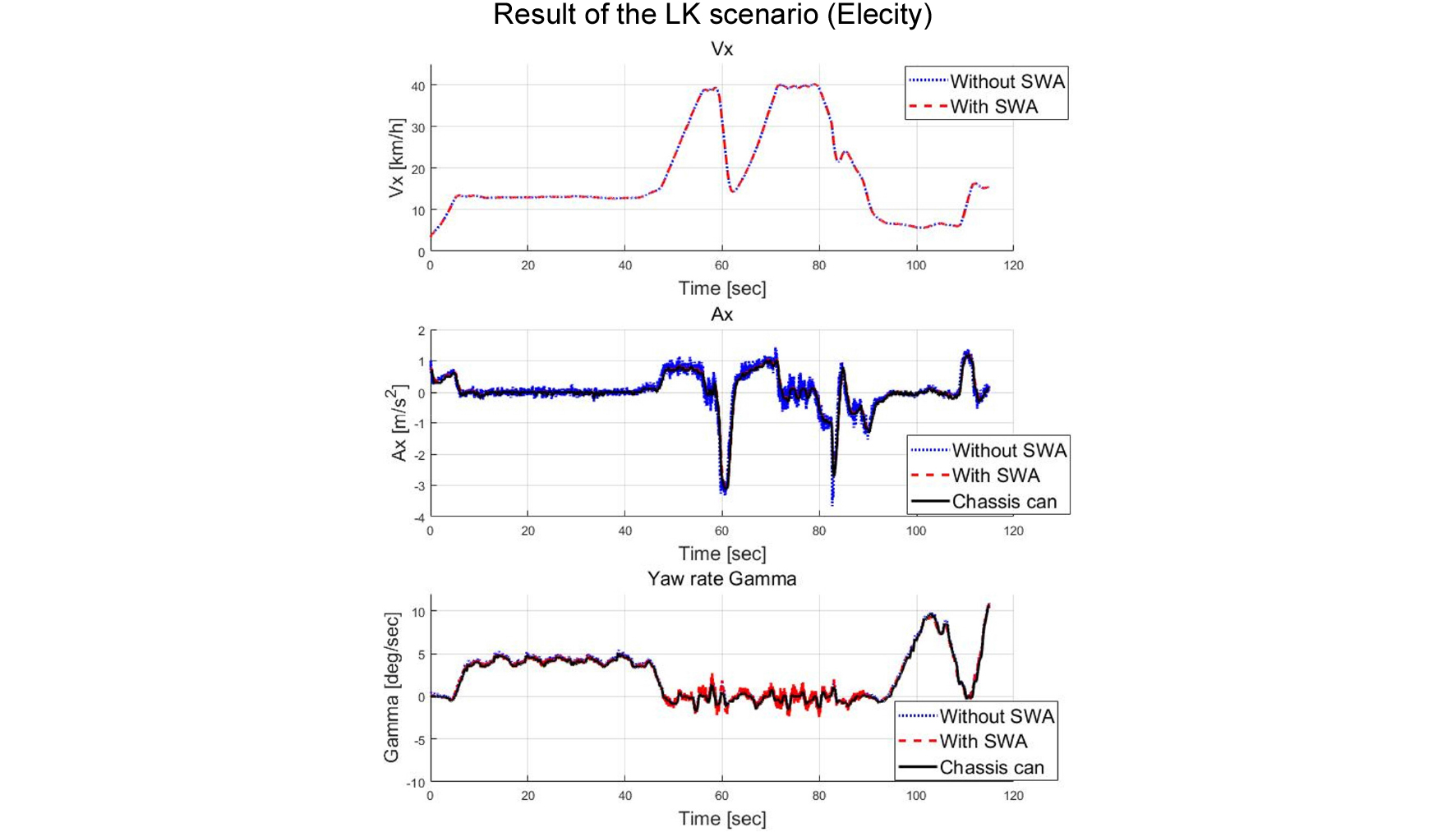
종방향 속도 (Vx)가 20km/h 이상인 상황에서는 조향각을 측정값으로 사용할 때 오히려 요 각속도 추정값의 잡음이 심해지는 경향을 보였다.
