

1. 서 론
2. 이론적 배경
2.1. 현장 측량 방법의 분류
2.2. 각 장치별 특징
2.3. PC-Crash
2.4. 선행연구 조사
3. 연구 방법
3.1. 시험장소 선정
3.2. 측량 및 후가공
3.3. 스케일 적용
3.4. 측량 방법의 정확도 검증 과정
3.5. 오차 분석 방법
4. 결과 및 고찰
4.1. 지점별 측정 결과
4.2. 오차 분석
5. 결 론
1. 서 론
교통사고 분석은 사고의 원인을 규명하고, 재발을 방지하며, 사고에 대한 과실을 판단하기 위해 필수적이다. 이 필요성을 방증하듯 자동차산업의 발전과 함께 교통사고 분석 기술은 고도화되어 왔다. 하지만 최근에는 도로에 자율주행 자동차가 혼재된 상황이 증가하며 교통사고 또한 기존의 인간에 의한 것들과 는 다른 양상을 보인다.(1) 이 때문에 교통사고 분석 기술은 새로운 국면을 맞이했으며 레벨4 자율주행을 개발 중인 현시점에서는 더 정밀한 교통사고 분석이 필요해졌다.(2) 그 방법에는 EDR, DSSAD 분석과 더불어 교통사고를 재현하는 상용 시뮬레이션 프로그램을 사용할 수도 있는데 이를 위해 사고 현장을 정밀하게 3D 모델링하는 작업이 필요하다. 가상현실에서 모든 시뮬레이션이 진행되기 때문에 현실의 도로, 건물, 교통안전 시설물들을 작은 오차로 옮겨올수록 더 정확한 분석이 가능해지기 때문이다. 이에 따라 교통사고 분석의 효율성과 정확성을 높이기 위한 다양한 현장 측량 방법이 개발되고 있다.(3) 각 방법에는 고유의 장단점이 있으며, 사용할 수 있는 기술과 도구가 발전함에 따라 사고 현장 매핑 및 모델링 프로세스 또한 다양화되고 있다.(4) 그러나 각 방법의 효율성과 오차 정도를 체계적으로 비교 분석한 연구는 부족한 상황이다. 따라서 다양한 측량 방법을 이용하여 교통사고 현장을 재현하는 과정에서 발생할 수 있는 오류와 원인을 파악하고, 어떤 방법이 효율적인지를 판단하기 위한 연구를 진행하였다. 본 연구에서는 360 카메라 영상 기반 포토그래메트리(Photogrammetry) 기술로 생성된 3D 도면, 드론 촬영 영상 기반 포토그래메트리 기술로 생성된 3D 도면, 드론 촬영 이미지, 위성 이미지의 총 네 가지 방법으로 제작된 지도를 다중 센서 융합(Multi-sensor fusion) 기술로 제작된 정밀 지도와 비교 분석하였다.
2. 이론적 배경
2.1. 현장 측량 방법의 분류
Table 1은 각 측량 방법의 표현 가능한 차원, 사용하는 센서의 종류를 나타낸 것이다. 가장 기초적인 2D 카메라 이미지부터 라이다(Lidar)를 융합하여 사용하는 3D 모델링까지 총 세 가지 분류로 나누어 각각의 특징, 장단점, 이론적 원리를 설명하는 것으로 2장의 내용을 구성한다.
Table 1.
Classification of surveying methods
| Surveying methods | Dimension | Sensor |
| Multi-sensor fusion | 2D, 3D | Image, Lidar |
| Photogrammetry | 2D, 3D | Image |
| Imagery | 2D | Image |
2.2. 각 장치별 특징
기존의 교통사고 재현 시뮬레이션에서는 위성사진이 주로 사용되어 왔다. 위성사진은 구글에서 서비스하는 지도 또는 국토지리정보원에서 제공하는 위성사진을 활용하여 교통사고 현장의 환경을 시뮬레이션 프로그램에 적용한다. 위성사진은 누구나 무료로 이용할 수 있기 때문에 사고 위치만 파악되면 편리하게 사고 현장의 2D 환경을 재구성할 수 있는 장점이 있다. 그러나 촬영용 인공위성은 매우 높은 고도에 있기 때문에 구름이나 다른 물체에 의해 노면이 가려질 수 있으며, 정밀도가 떨어진다는 단점이 있다. 이로 인해 정확한 사고 시점의 데이터를 사용하는 데 어려움이 있다. 본 연구에서는 위성사진이 가지는 단점을 보완하기 위해 드론과 360 카메라를 이용한 현장 측량을 수행하여 오차를 분석하였다.
2.2.1. 드론 촬영 이미지
드론을 활용한 항공사진은 위성사진과 유사한 방법으로 교통사고 현장을 촬영한다. 하지만 비교적 가까운 거리에서 촬영하기 때문에 오차가 작고, 실시간으로 촬영할 수 있어 최신 데이터를 확보할 수 있다. 넓은 범위의 지도를 만드는 경우 여러 사진을 이어 붙이는 이미지 스티칭 과정이 필요하지만, 교통사고 현장과 같은 상대적으로 좁은 영역에서는 단일 사진을 사용해 신속하고 정확한 데이터를 얻을 수 있다.(5)
2.2.2. 포토그래메트리
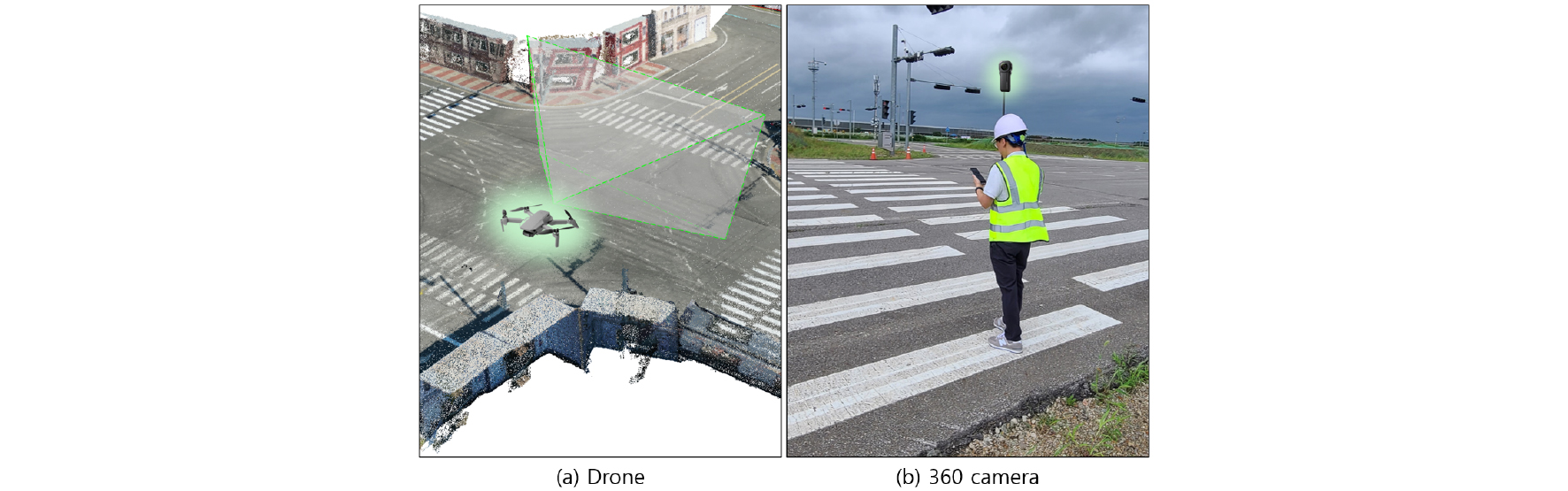
포토그래메트리는 2차원 이미지 데이터로부터 기하학적인 3D 데이터를 추출하는 기술이다. 대형 오브젝트나 조형물의 정확한 측량과 지도 생성을 위해서는 드론에 카메라를 장착하여 상공에서 촬영한 데이터를 사용하기도 한다. 이를 Fig. 1(a)에서 나타내었으며 여러 장의 이미지를 촬영하였다면 정렬 작업을 통해 포인트 클라우드 데이터(PCD, Point cloud data)로 변환한 후, 폴리곤 메쉬로 변환하여 다각형 모델링 데이터를 얻는다. 드론 촬영 이미지 기반의 포토그래메트리는 넓은 범위를 신속하게 스캔할 수 있으며, 드론 촬영 2D 이미지와의 차이점은 3D 모델링 데이터를 얻을 수 있다는 점이다.(6)
Fig. 1(b)는 360 카메라를 사용한 3D 모델링을 위해 현장 조사하는 모습을 나타낸 것이다. 360 카메라로 촬영한 비디오는 AI 처리를 통해 3D 지도로 변환한다. 이를 통해 고가의 장비나 전문 지식 없이도 현실의 3D 공간을 디지털로 구현할 수 있다.
2.3. PC-Crash
PC-Crash는 교통사고 분야에서 사용되는 상용 소프트웨어로 오스트리아의 Dr.Hermann Steffan에 의해 개발되었다. 뉴턴 역학을 기반으로 충돌 전 속도 및 충돌 자세 등과 같은 다양한 변수를 고려하여 차량의 충돌 후 거동을 모사할 수 있으며 사고에 대한 해석 및 3차원 재구성이 가능한 프로그램이다.(7) 교통사고의 재구성을 위해 사고 현장의 도면 제작이 선행되어야 한다. 도면의 제작은 CAD, 이미지, 3D 스캔 데이터를 사용할 수 있다. PC-Crash는 교통사고 분석에서 일반적으로 사용하는 형식의 도면 대부분을 적용할 수 있으며, 프로그램 내에서 스케일 조정, 거리 측정 등의 기능을 제공한다. Table 2는 PC-Crash에서 지원하는 도면 파일의 확장자를 나타낸 것이다.
Table 2.
File formats supported by PC-Crash
| Type | Compatible Formats |
| CAD drawing | dxf, idf |
| Image | bmp, jpg, png, svg, tiff |
| 3D | e57, las, asc, xyz, 3ds, obj, directX |
2.4. 선행연구 조사
선행연구는 크게 두 가지로 나뉜다. 다양한 측량 방법에 대한 연구와 측량 데이터의 사고분석 활용에 관한 연구이다. 각 연구들을 요약하여 나열하면 다음과 같다.
Kim 등은 자율주행을 위한 HD 맵 구축 연구에서, 서울 시내에서 수집한 데이터를 바탕으로 CNN 기반 알고리즘을 사용하여 이미지 깊이를 추정하였다. 이 연구는 단일 이미지로도 3D 매핑이 가능함을 입증하고, 저렴한 카메라를 통해 비용 절감의 가능성을 제시하였다.(8) Lee 등은 고정익 무인항공기와 회전익 무인항공기를 이용한 지형측량 결과 비교에 대한 연구를 수행하여 저가의 보급형 무인항공기를 사용하여도 고가의 무인항공기 장비와 유사한 오차 수준을 보인다는 결론을 얻었다.(9) Cho 등은 무인 항공 사진측량기법을 이용하여 고해상도 공간 정보를 취득하는 것을 목적으로 GPS가 장착된 멀티콥터형 무인항공기와 DSLR 카메라를 이용해 시공 현장을 측량하였다. Network GPS 측량방법으로 지상기준점 측량을 실시한 결과와 비교했을 때 높은 정밀도의 수치정사영상과 수치표면모형을 제작할 수 있는 것을 확인하였다.(10) Kim 등은 드론 3차원 모델링으로 얻은 데이터를 교통사고 재현 시뮬레이션 프로그램인 PC-Crash에 적용하여 정상적인 충돌 해석이 가능함을 확인하였다.(11)
선행 연구를 종합하면, 고가의 측량 장비를 사용할 때 정밀도가 높아지는 것을 확인하였으며, 최근 무인항공기를 비롯한 다양한 센서 기술의 등장으로 비교적 낮은 비용으로도 효율적인 측량이 가능함을 보였다. 본 연구는 선행연구를 기반으로 다양한 방법으로 제작된 교통사고 현장의 도면을 재현 시뮬레이션에 적용하여 각 측량 장비의 효율성을 분석하고, 다양한 장비의 활용 가능성을 평가하고자 한다.
3. 연구 방법
본 연구에서는 도심부의 평면 신호교차로를 각 방법으로 측량하고, PC-Crash 프로그램으로 불러왔다. 스케일 조정 필요 여부를 확인하여 필요한 경우 스케일을 조정한 후 비교 지점을 선정하여 HD맵의 측량 값과 비교하는 방식으로 연구를 수행하였다.
3.1. 시험장소 선정
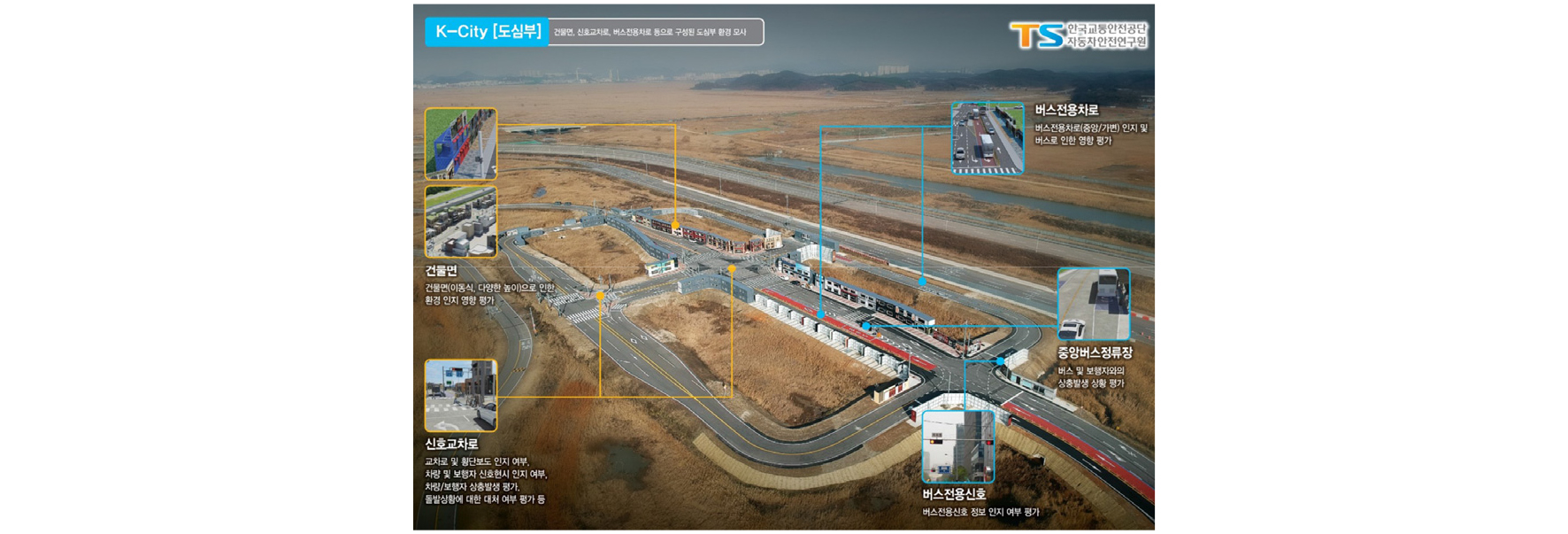
본 연구에서는 한국교통안전공단의 자동차안전연구원에 구축된 자율주행실험도시(K-City)의 도심부의 평면 신호교차로를 측량 지점으로 선정하였다.
Fig. 2는 K-City의 도심부의 전경을 나타낸 것으로 신호교차로, 버스전용차로 및 정류장 등으로 구성되어 실제 도로와 같은 실험 환경을 제공한다. 도심부에서는 차선유지, 변경, 속도유지 등의 자율주행 기능, 주변인지, 돌발대응 등의 다양한 실험을 수행할 수 있다.(12)
3.2. 측량 및 후가공
각 장비를 이용해 K-City 도심부의 측량을 수행하였다. Table 3은 장비별 측량 및 후처리 방법을 나타낸 것이다.
Table 3.
Surveying and post-processing methods
Table 4는 장비의 도입 비용, 도면화 작업에 필요한 비용, 측량 시간 및 측량된 데이터를 보정하여 도면화하는 데 소요되는 시간을 나타낸다. 장비의 도입 비용은 사용자의 선택에 따라 다소 변동될 수 있다. 스케일 조정 등 부수적인 작업에 소요되는 시간은 제외하였다.
Table 4.
Time and cost required for reconstruction
3.2.1. 360 카메라 촬영 이미지 기반 3D 변환
360 카메라를 이용한 현장 재구성은 큐픽스사의 큐픽스비스타를 이용하였다. 이 프로그램은 360도 카메라로 촬영한 이미지를 기반으로 고해상도의 3D 모델과 디지털 트윈을 생성하여, 건설 현장 관리, 부동산 가상 투어, 시설 관리, 그리고 교통사고 재현 및 분석 등 다양한 분야에서 활용되는 웹 기반의 소프트웨어이다. 360 카메라를 사용하면 공간 전체를 빠르고 효율적으로 캡처할 수 있으며, 단일 촬영으로 모든 방향의 데이터를 수집할 수 있어 작업의 효율성을 크게 향상시킨다. 큐픽스사는 현장의 측량 및 3D 변환, 후처리를 위한 다양한 솔루션을 제공하고 있다. Table 5는 각 솔루션의 특징 및 역할을 나타낸 것이다.
Table 5.
The specifications of cupix solutions
본 연구에서는 현장 측량을 위해 RICOH사의 Theta Z1 360 카메라를 사용하였다. Table 6은 Theta Z1 360 카메라의 제원을 나타낸 것이다.
Table 6.
The specifications of the 360 camera
Fig. 3은 수집된 원본 이미지를 나타낸 것으로 본 연구에서는 평면 신호교차로 구간을 2FPS(Frame per second)로 5분간 촬영하여, 150프레임의 이미지를 획득하였고, 큐픽스비스타를 이용해 현장을 3D로 재구성하였다.
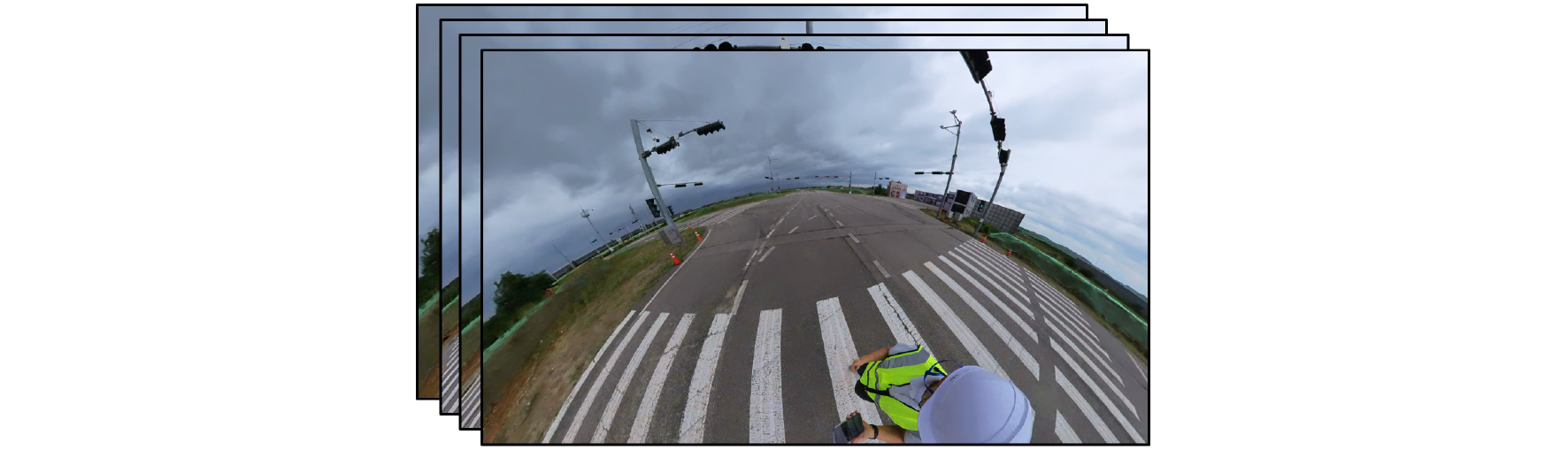
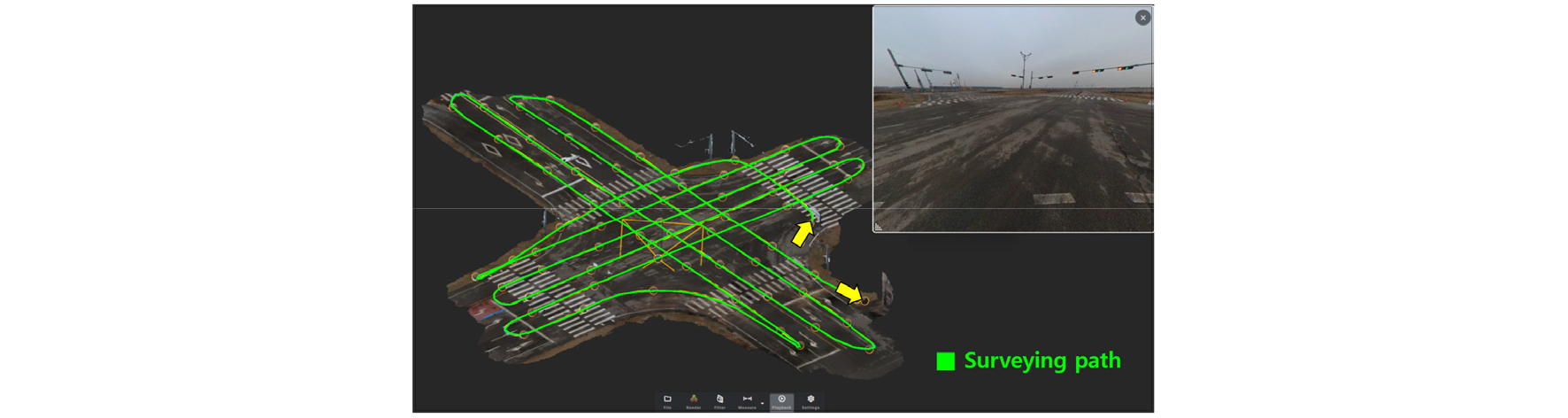
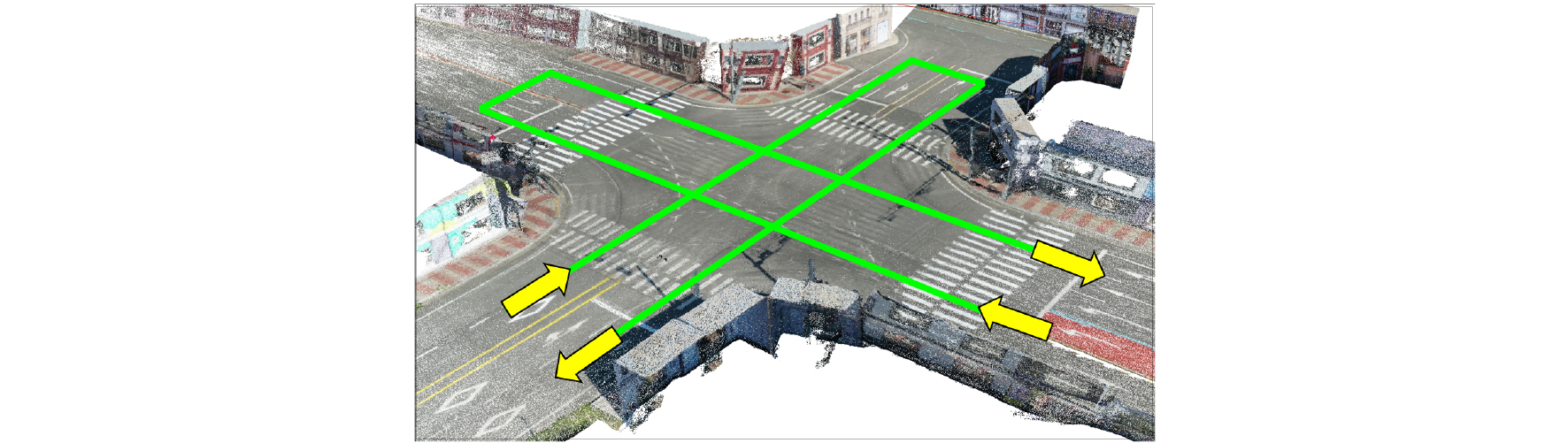
Fig. 4는 포스트 프로세싱 소프트웨어인 비스타포인트에서 360 카메라의 측량 경로와 이미지를 나타낸 것이다. 조사자는 이 소프트웨어를 이용해 포인트 클라우드의 필터링 및 스케일 작업 등을 수행할 수 있으며, 측량 경로에 표시된 아이콘을 클릭하여 촬영된 360 이미지를 확인할 수 있다. 이를 통해 사고 현장의 도면과 함께 사고 당시 노면 및 도로 시설물에 남아 있는 흔적을 하나의 파일에서 확인할 수 있어, 데이터 관리가 용이하다는 장점이 있다.
변환된 3D 포인트클라우드 데이터는 PC-Crash 호환 포멧인 E57 포맷으로 추출하였다. E57 포맷은 ASTM(American society for testing and Materials) E2807 표준에 따라 정의된 3D 스캐닝 데이터 저장 형식으로, 포인트 클라우드 데이터를 효율적으로 저장하고 교환할 수 있어 널리 사용된다.
3.2.2. 드론 촬영 이미지
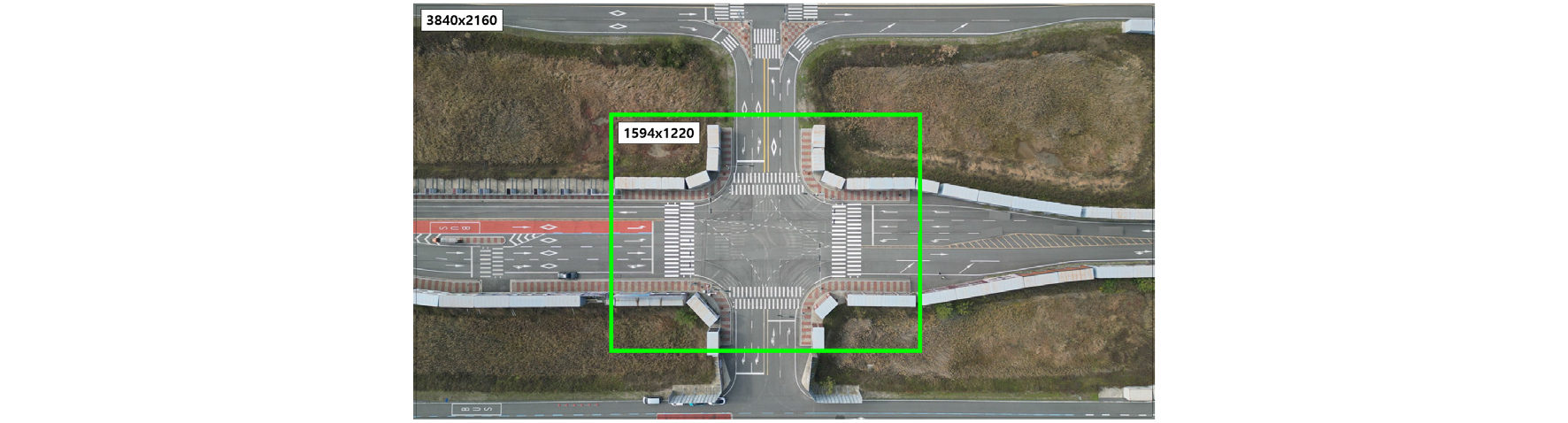
드론을 약 120 m 높이로 띄운 후, 카메라의 틸트 기능을 사용해 렌즈가 수직으로 지면을 향하도록 설정하여 촬영했다. 본 연구에서는 DJI사의 Mini 3 Pro 드론을 이용해 현장을 측량하였다. Table 7은 드론에 설치된 카메라의 제원을 나타낸 것이다. Fig. 5는 드론을 이용해 촬영한 이미지를 나타낸 것으로 3840×2160 해상도로 촬영되었으며, 이후 본 연구에 필요한 교차로 영역을 추출하여 최종적으로 1594×1220 해상도의 이미지를 확보하였다.
Table 7.
Specifications of the drone camera
3.2.3. 드론 촬영 이미지 기반 3D 변환
Agisoft사의 Metashape 소프트웨어를 이용하였다. 이 소프트웨어는 이미지를 3D 모델, 디지털 지형 모델(DTM, Digital terrain model), 정사사진(orthophoto), 텍스처드 모델 등으로 변환하는 데 사용된다. 주로 드론으로 촬영한 항공사진이나 지상 촬영 이미지를 기반으로 고정밀의 3D 데이터와 지형도를 생성하며, 건축 및 토목 공학, 문화유산 보존, 농업, 환경 연구, 도시 계획, 그리고 교통사고 재현 등 다양한 분야에서 활용된다. 특히 교통사고 재현에서는 사고 현장의 3D 도면을 만들어 사고 원인 분석과 법적 증거 자료로 사용된다. Table 8은 Metashape의 설정 조건을 나타낸 것이며, Fig. 6은 3D 변환 결과에 드론의 측량 경로를 나타낸 것이다.
Table 8.
Settings of metashape software
3.3. 스케일 적용
라이다 기반 측량은 높은 정밀도를 제공하고, 실제 크기를 정확하게 반영한다. 반면에 이미지 기반 도면은 촬영 장비의 정밀도와 렌즈 왜곡 등 때문에 실제 크기와 차이가 날 수 있다. 이런 차이를 보정하려면 현장에서 기준이 되는 지점을 측정해서 스케일 보정을 해야 한다. 본 연구에서는 실제 교통사고 현장과 유사한 조건을 가정하여, 조사자가 교통을 통제하지 않고도 안전하게 측정할 수 있는 지점을 선정하였다. Fig. 7은 스케일 기준점을 표시한 것으로 횡단보도를 기준 지점으로 선정하였다. 조사자는 보행 신호 시간을 이용해서 횡단보도 위의 기준점을 측정할 수 있고, 횡단보도 노면표시의 패턴을 이용해서 위성사진이나 드론 사진에서도 쉽게 기준 지점을 확인할 수 있다.
3.4. 측량 방법의 정확도 검증 과정
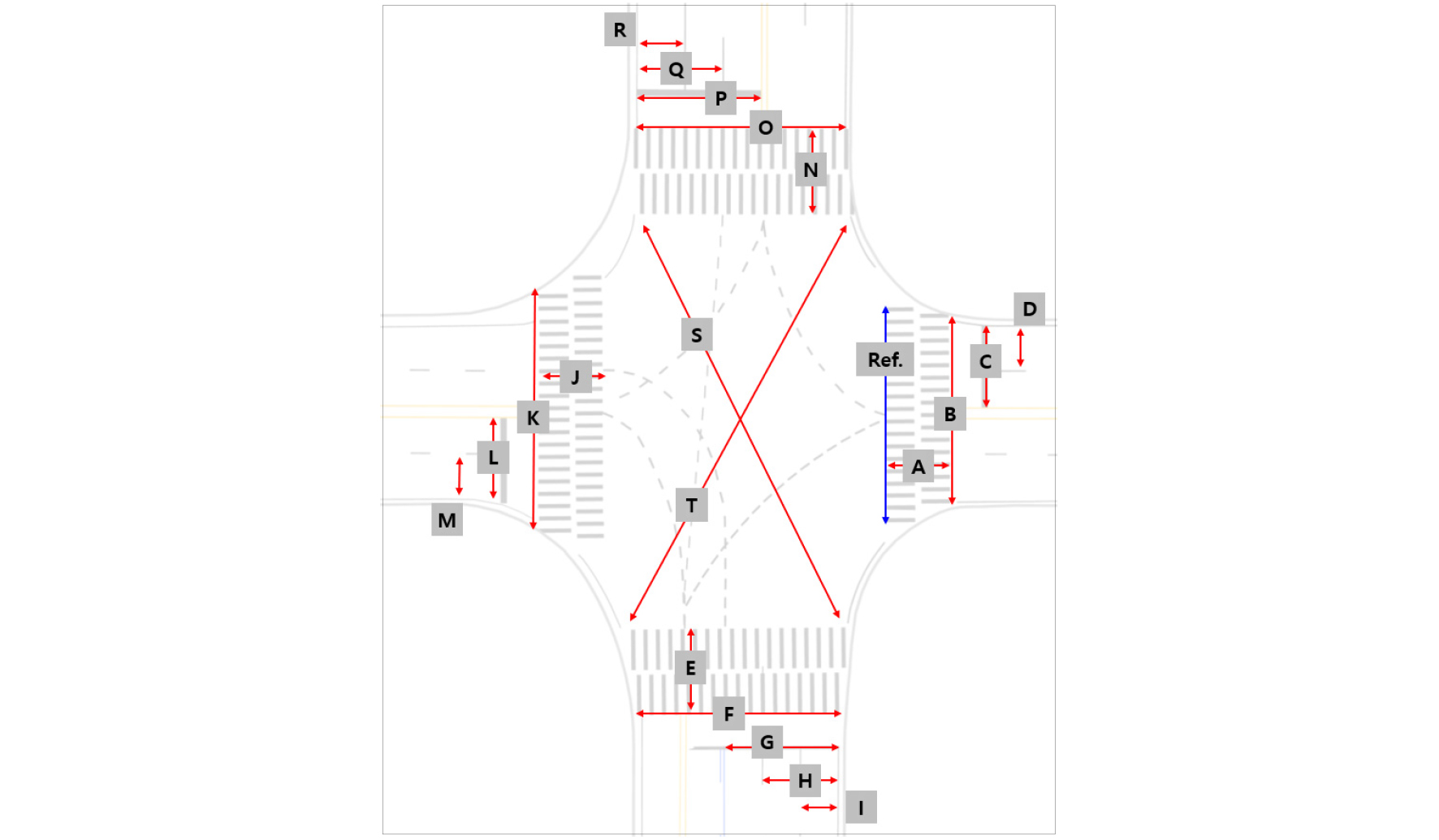
각 현장 측량 방법을 기반으로 취득한 교통사고 현장 도면의 오차를 분석하기 위해 PC-Crash의 스케일 조정 기능을 이용해 모든 도면의 기준 지점을 일치시켰다. Fig. 8은 측정 지점을 나타낸 것으로 PC-Crash의 거리 측정 기능을 이용해 A~T 구간의 거리를 측정하고, 다중센서 융합으로 측량된 고정밀 HD 맵과 비교하였다. 다중센서 융합 지도는 첨단 모바일 맵핑 시스템(MMS: Mobile Mapping System)을 통해 제작된다. MMS는 3D 라이다, 카메라, GPS 센서를 통합하여 사용하므로 고정밀 데이터를 수집할 수 있다. 도로의 폭, 차선 등을 높은 정확도로 구현할 수 있다.
3.5. 오차 분석 방법
측량 방식에 따른 오차는 아래의 식 (1)의 평균 제곱근 오차(RMSE, Root mean square error), 식 (2)의 평균 절대 오차(MAE, Mean absolute error), 식 (3)의 평균 제곱 오차(MSE, Mean square error)를 사용하여 비교하였다.(13)
여기서 는 실제값, 는 측정값, n은 측정 지점의 수를 나타낸다.
4. 결과 및 고찰
4.1. 지점별 측정 결과
Table 9는 HD맵에서 측량된 실제값(Ground truth)과 각 장치로 측정된 지점의 측정값과 오차를 나타낸 것이다.
Table 9.
Measurement results and errors by section
4.2. 오차 분석
각 구간의 길이가 다르기 때문에 길이를 고려한 상대적인 오차를 비교 분석하기 위해 백분율로 환산하였다. 오차 비율을 환산하여 Table 10에 제시하였으며, 각 구간에서 발생한 거리 오차의 평가를 위해 계산된 RMSE, MAE, MSE를 Table 11에 나타내었다.
Table 10.
Error rate by section
Table 11.
Comprehensive error results
| Metric | 360 camera-based PCD | Drone-based PCD | Drone imagery | Satellite imagery |
| RMSE (%) | 2.02 | 3.37 | 2.07 | 2.68 |
| MAE (%) | 1.16 | 2.68 | 1.53 | 1.88 |
| MSE (%2) | 4.08 | 11.37 | 4.28 | 7.19 |
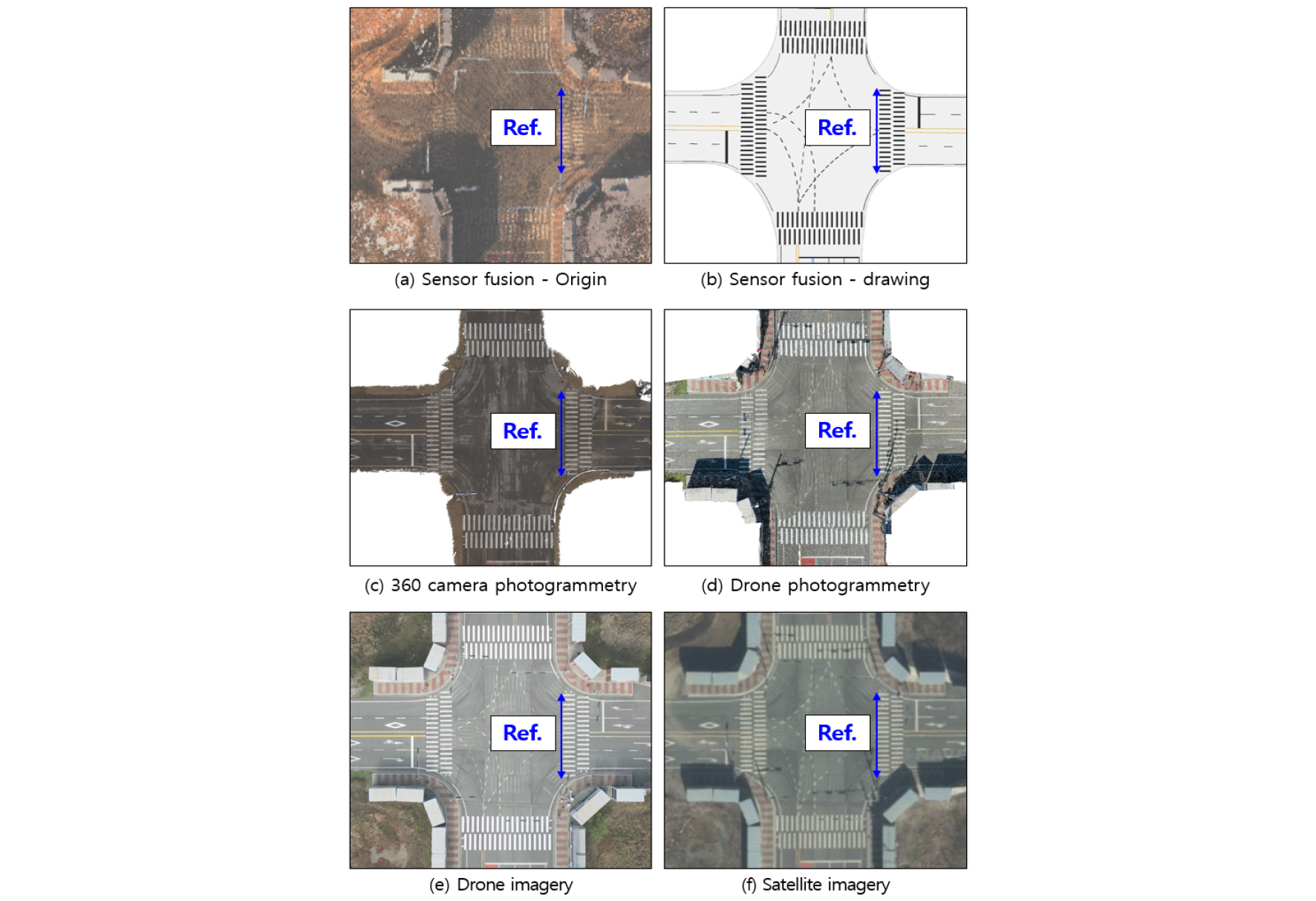
오차분석 결과 360 카메라 기반 PCD 도면의 오차가 가장 작고, 드론 촬영 이미지, 위성 이미지, 드론 기반 PCD 순서로 낮은 오차를 보이는 것으로 확인된다. 360 카메라 기반 PCD, 드론 촬영 이미지, 위성 이미지는 1%대의 평균 오차를 나타내었고, 드론 영상 기반의 PCD만 2%대 오차를 나타내었다. 이는 1 m당 약 1~3 cm의 오차를 나타내는 것으로 일반적인 교통사고 분석에서 허용 가능한 오차로 판단된다.
드론 영상 기반 PCD에서 최대 9.4%의 비교적 큰 오차를 보였다. 이는 촬영의 높이에 따른 영향으로 판단되며, 본 연구에서는 지상 5 m 이하 높이에서 촬영된 영상을 사용하였다. 따라서 영상의 외곽부에 해당는 J~M 구간에 렌즈 왜곡으로 인한 오차가 발생한 것으로 판단된다. 광각 렌즈의 특성상 중심부에서 멀어질수록 이미지가 더 많이 왜곡되며, 직선이 곡선으로 보이는 현상이 발생한다. B-구간 역시 영상의 외곽 부분에 해당하지만 기준 지점을 B-구간에 인접한 구간으로 설정하여 K-구간에 비해 다소 낮은 오차를 보인 것으로 판단된다.(14) 또한 선행연구에서 사용한 장비와 소프트웨어에 비해 사양이 낮은 비교적 저가의 장비를 사용했기 때문에 동일한 수준의 정확도를 기대하기 어렵다. 하지만 드론 영상 기반 PCD 기술을 활용한 도면은 3D 표현이 가능하기 때문에 경사가 있는 교통사고 현장에서 2D 이미지가 갖는 한계를 극복할 수 있다는 차별점이 존재한다. 따라서 촬영 높이의 변화와 영상 왜곡 보정을 통해 오차를 줄이는 방법에 대한 연구가 후행될 필요가 있다.
위성지도의 경우, 최소 0.8%에서 최대 4.57%로 측정구간에 따라 오차의 편차가 크게 나타났다. 우리나라 국토지리정보원의 위성 이미지의 해상도는 도시지역은 0.12 m, 비도시지역은 0.25 m이다. 따라서 다른 방법으로 측량된 도면과 비교했을 때 상대적으로 낮은 정밀도를 가진다.(15) 거리 측정을 위해 정확한 지점을 선택해야 하지만, 낮은 정밀도로 인해 사용자가 명확한 기준 지점을 찾기 어려워 선택하는 지점에 따라 거리가 달라질 수 있는 문제가 존재한다.
측량된 도면을 기반으로 속도를 계산할 경우, 속도가 빠를수록 거리 오차로 인한 속도 오차는 더욱 커질 수 있다. 따라서 분석자는 분석 속도에 따른 거리 오차를 고려하여 측량 방법을 선택해야 한다.
5. 결 론
본 연구에서는 교통사고 재현을 위한 현장 측량 방법의 효율성 및 오차 분석을 통해 교통사고 재현 시뮬레이션 프로그램에서 사용되는 교통사고 현장의 지도 작성 방법 선택에 있어 참고할 만한 기준을 제시하였으며 그 결과는 다음과 같다.
1) 360 카메라로 촬영한 영상 기반의 포토그래메트리 기술로 작성된 지도의 오차가 가장 작았으며 시간적, 경제적 측면에서 가장 추천할 만한 측량 방법이지만 넓은 구간일수록 효율이 낮아지므로 대안을 고려해야 한다.
2) 드론으로 촬영한 영상 기반의 포토그래메트리 기술로 제작된 도면은 비교적 높은 오차를 보였지만 짧은 측정시간에 넓은 현장을 3D로 측량할 수 있다는 장점이 있는 것으로 파악된다.
3) 드론 촬영 이미지는 넓은 구간에서도 비교적 짧은 시간 안에 측량이 가능하다는 장점이 있다.
4) 위성 지도의 경우 현장에서 측량하지 않아도 되는 장점이 있지만, 사용자의 숙련도에 따라 측정 거리가 달라질 수 있는 단점이 있다.
본 연구에서는 교통사고 현장을 재구성하여 2차원 거리 비교를 수행하였다. 이를 통해 측정 방식에 따른 정확도와 교통사고 분석의 효용성을 평가하였다. 그러나 2차원 분석만으로는 입체적이고 복잡한 사고 현장의 정확한 재현에 한계가 있을 수 있다. 특히 자율주행자동차의 사고 분석에서는 3차원 데이터가 더욱 중요하다. 따라서 향후 연구에서는 3차원 현장의 비교 검증을 추가하여 보다 정밀하고 포괄적인 분석을 통해 교통사고 및 자율주행자동차 사고 분석에 활용할 필요가 있다고 판단된다.
