

1. 서 론
2. EDR 데이터 분석 프로그램
2.1. 개발환경
2.2. GUI 및 주요 기능
3. 사고 재구성 방법
3.1. 사고 현장 모델링
3.2. 사고 데이터 입력
3.3. 사고 영상 동기화
4. 실사고 기반의 사고 재구성 결과
4.1. Case 1: 50km/h 이하(ESC 미작동)
4.2. Case 2: 100 km/h 이상(ESC 미작동)
4.3. Case 3: 100 km/h 이상(ESC 작동)
5. 결 론
1. 서 론
우리나라에서는 자동차관리법 시행규칙 제30조의 3에 따라 사고기록장치(Event Data Recorder, EDR) 기록정보 공개 의무화를 2015년 12월 19일부터 시행하고 있다.(1) 사고기록장치는 일반적으로 차량의 에어백 제어장치(Airbag Control Unit, ACU)에 내장된 데이터 기록용 장치를 의미하며, 차량 제조사의 전용 장비를 OBD(On-Board Diagnosis) 단자나 ACU에 전용 케이블을 직접 연결하여 데이터를 추출한다.(2) 사고기록장치에 기록된 데이터는 충돌 시점 이전과 이후의 데이터로 나뉜다. 기록 시점(0.0초) 이전의 데이터에는 최대 5초 전까지의 차량 정보가 포함되며, 구체적인 항목으로는 자동차 속도, 엔진 회전수, 엔진 스로틀밸브 열림량, 가속 페달 변위량, 제동 페달 작동 여부, ABS(Anti-lock Brake System)/ESC(Electronic Stability Control) 작동 여부, 조향 핸들 각도 등이 있다. 기록 시점 이후의 데이터에는 에어백 시스템 정보와 구속 장치 전개 명령 정보가 기록되어 에어백과 안전띠 프리텐셔너의 전개 여부를 확인할 수 있다. 또한 정면 및 측면 가속도, 속도 변화 누계, 전복 경사각도 등의 정보도 포함된다.
최근 들어 사고기록장치에 기록된 다양한 차량 데이터를 활용하여 교통사고 분석에서의 활용도가 증가하고 있다. 북미에서는 1990년대부터 사고기록장치 데이터의 신뢰성에 관한 연구가 진행되었으며,(3~5) 국내에서도 주충격력(Principal Direction of Force, PDOF)을 활용한 방법, 전복 사고, 다중 및 연쇄 추돌 사고 분석 사례 등이 발표되었다.(6~8) 이처럼 사고기록장치에 기록된 데이터의 신뢰성을 검증하기 위한 연구는 국내외적으로 활발히 이루어졌으며, 현재 높은 수준의 신뢰성이 확보된 상태이다. 최근에는 친환경차 뿐 아니라 자율주행 차량 사고 분석에 적합한 EDR 데이터 항목에 관한 연구도 활발히 진행되고 있다. 그러나 일부 국내 여론은 여전히 EDR 데이터의 신뢰성에 의문을 제기하고 있다. 따라서 본 연구에서는 EDR 데이터를 활용하여 사고를 재구성하고, 블랙박스와 CCTV 영상을 기준으로 그 정확도를 분석하고자 한다. EDR을 활용한 사고 재구성을 위해서는 충돌 시점 이전 5초 동안의 데이터를 해석 프로그램에 적합한 형태로 변환하여 입력해야 한다. 그러나 대부분의 EDR 데이터는 PDF 형식으로 저장되어 있어, 차량 데이터 추출이나 그래프 분석을 위해 수작업으로 데이터를 옮겨야 하는 불편함이 있다. 이러한 데이터를 효과적으로 관리하기 위해서는 PDF 형식을 Excel 등 분석 및 편집을 할 수 있는 형식으로 변환하는 것이 필요하다.
본 연구에서는 국내에서 점유율이 가장 높은 현대기아차의 EDR 데이터 양식을 우선으로 고려하여, 파이썬(Python)을 활용한 EDR 데이터 분석 소프트웨어를 개발하였다. 이 소프트웨어는 EDR 데이터를 PC-Crash 프로그램에 입력할 수 있는 데이터 양식으로 변환하는 기능을 포함하고 있으며, 이를 바탕으로 사고 재구성 방법을 제시하였다. 마지막으로, 실사고 사례의 EDR 데이터를 활용하여 PC-Crash로 재구성할 때, 입력 인자와 해석 모델에 따른 사고 재구성의 정확도를 분석하고, 사고 시나리오에 따라 적합한 해석 방법과 한계점을 고찰하였다.
2. EDR 데이터 분석 프로그램
2.1. 개발환경
본 연구에서 개발한 EDR 데이터 분석 소프트웨어는 Python 3.7 환경에서 PyQt 플러그인을 활용하여 GUI(Graphic User Interface)를 제작하였다.
2.2. GUI 및 주요 기능
EDR 보고서에는 차종 정보, 부가 정보, 사고 시점 이전, 이후의 차량 정보 등 다양한 데이터가 기록되어 있다. 그러나 EDR 보고서는 PDF 형식으로 되어 있어, 각 표에 기록된 데이터를 분석하거나 데이터베이스로 구축하려면 다른 형식으로 변환하는 과정이 필요하다.
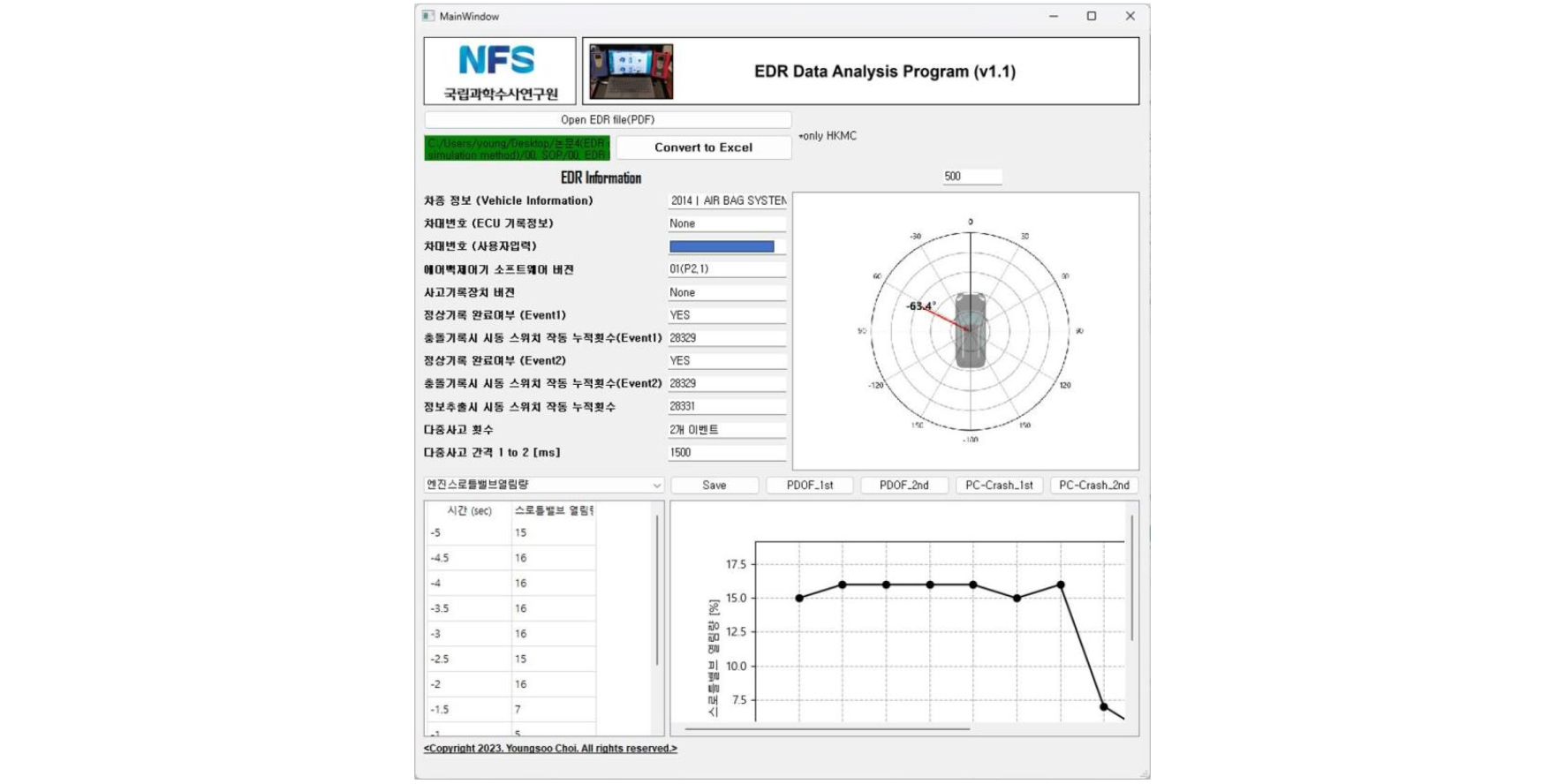
Fig. 1은 본 연구에서 개발한 EDR 데이터 분석 소프트웨어의 GUI이다. ACU에서 추출한 PDF 형식의 EDR 보고서를 입력하면 Excel 형식으로 변환할 수 있으며, EDR 보고서의 주요 정보를 한눈에 확인할 수 있다. 또한, 항목별 데이터를 그래프로 나타내고, 그 결과를 이미지 파일로 저장할 수 있으며, 사고 해석에서 중요한 주충격력의 방향과 크기를 자동으로 계산하여 극좌표계로 표시한다. 마지막으로, PC-Crash의 입력 데이터를 텍스트 파일 형태로 생성하는 기능을 추가하였다. 변환된 Excel 시트에는 EDR 보고서의 주요 데이터가 탭으로 나누어져 있으며, 각 탭에는 해당 항목별 데이터가 기록되어 있다.
3. 사고 재구성 방법
EDR 데이터를 이용해 사고 상황을 재구성한 후, CCTV 또는 블랙박스 등 실제 영상과 동기화하기 위해 일반적으로 Fig. 2와 같은 과정으로 사고 재구성을 진행한다.

3.1. 사고 현장 모델링
사고 현장을 모델링하는 방법으로는 네이버, 카카오맵 등에서 제공하는 위성지도 사진과 축척 정보를 활용하는 간단한 방법과 3차원 레이저 스캐너나 드론을 활용하여 현장을 계측하는 방법이 있다.(9,10) 최근에는 드론 운용이 어려운 터널 등 실내를 제외하고는 드론을 활용한 방법이 주로 사용되며, 우리 원에서도 기존 연구를 통해 드론을 이용한 현장 재구성 기법의 신뢰성을 확인하였다.(11) 특히 맵핑용으로 출시된 드론의 경우, RTK(Real Time Kinematic)가 장착되어 cm 단위의 위치 정밀도를 바탕으로 신뢰성 높은 맵핑 결과를 제공한다.
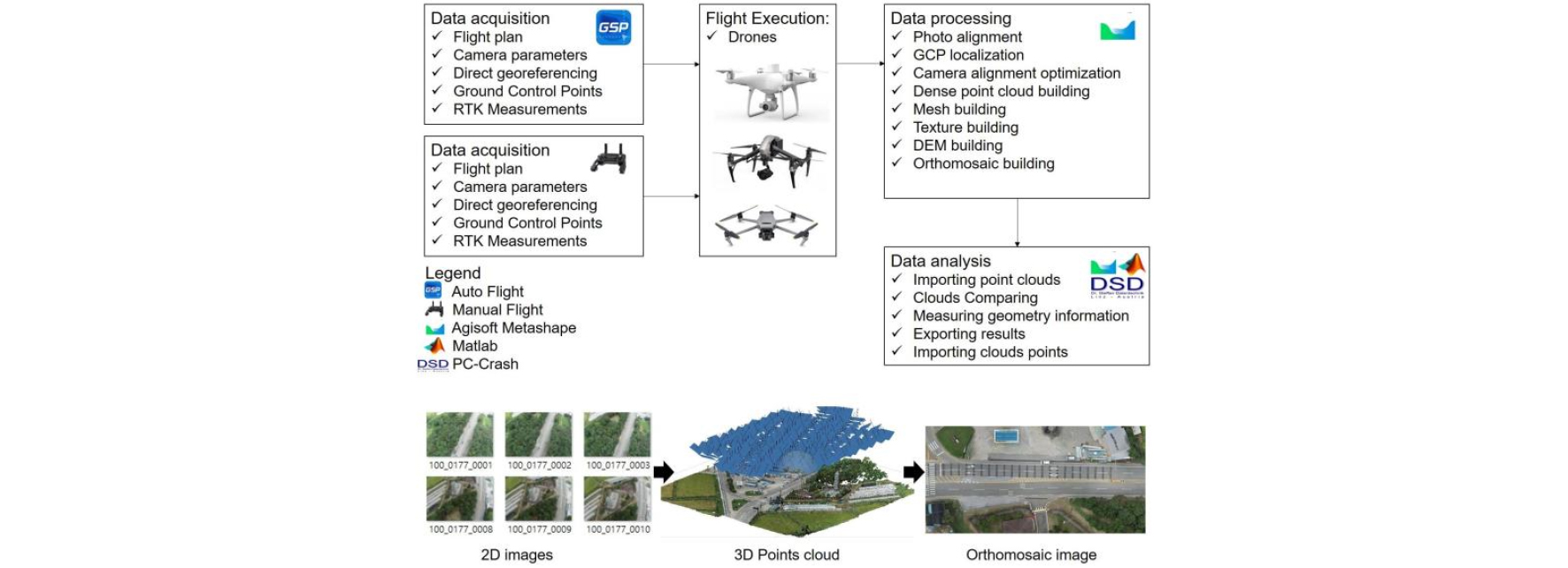
드론을 활용한 맵핑 작업은 Fig. 3에 나타난 과정으로 수행된다. 먼저, 드론을 수동으로 운용하여 사고 지역을 직접 촬영하거나, 관심 영역을 설정한 후 드론이 자동으로 경로를 생성하여 촬영한다. 촬영된 사진은 맵핑(Mapping) 프로그램을 통해 포인트 클라우드로 변환되어 3차원 모델을 생성하거나, 정사모자이크 지도(Orthomosaic Map)를 추출할 수 있다. 정사모자이크 지도는 기하학적으로 보정된 항공사진으로, 왜곡 없이 일정한 스케일을 갖는 2차원 지도를 의미한다. 사고 상황과 복잡도에 따라 2차원 또는 3차원 모델을 선택하여 작업을 진행할 수 있으며, 본 연구에서는 Agisoft의 이미지 기반 3D 모델링 소프트웨어, Metashape을 이용해 실사고 현장을 맵핑 작업을 수행하였다.
3.2. 사고 데이터 입력
본 연구에서 사용한 PC-Crash는 DSD에서 개발한 교통사고 재현 소프트웨어로, 차량 동역학 해석 및 충돌 해석 등을 통해 사고를 재구성하고 시각화하는 데 활용된다.(12) 사고기록장치에 기록된 사고 상황을 재구성하기 위해서는 사고 이전의 차량 정보 중 자동차 속도와 조향핸들 각도를 사용한다. 이후 프로그램의 차량 데이터베이스에서 사고 차량과 동일한 제조사 및 모델을 선택하여 해당 차량의 제원과 동역학을 반영한다. PC-Crash 14.0 이전 버전에서는 차량의 가감속도만 입력할 수 있었으나, 이후 버전에서는 가감속도 또는 차량 속도를 선택적으로 입력할 수 있다. 가감속도()를 계산하기 위해서는 식 (1)과 같이 현재 속도()와 이전 속도()의 차를 EDR 데이터의 시간 간격()으로 나눈다:
이후, Sequence 기능을 활용하여 EDR 데이터에 기록된 시간 간격에 따라 가감속도와 조향각을 입력하고, 5초간의 데이터를 순차적으로 입력한다. 해석은 Backward와 Forward 두 가지 방식으로 수행할 수 있는데, Backward 해석은 EDR 데이터의 0초를 기준으로 하여 -5초까지의 차량 상태를 해석하는 방법이다. 반면, Forward 해석은 EDR 데이터의 -5초를 시작 시점으로 하여 5초 동안의 차량 상태를 해석하는 방법이다.
Backward 해석 시에는 운동학 모델(Kinematics model)만 사용할 수 있으며, 이 경우 횡방향힘은 고려되지 않고, 식 (2)와 같이 운동학 모델에서의 마찰력()은 종방향힘()에만 영향을 미친다.
반면, Forward 해석에서는 운동학 모델뿐만 아니라 운동역학 모델(Kinetics model)도 사용할 수 있으며, 이 경우 식 (3)과 같이 횡방향힘() 및 종방향힘()이 마찰력()이 모델에 적용된다.
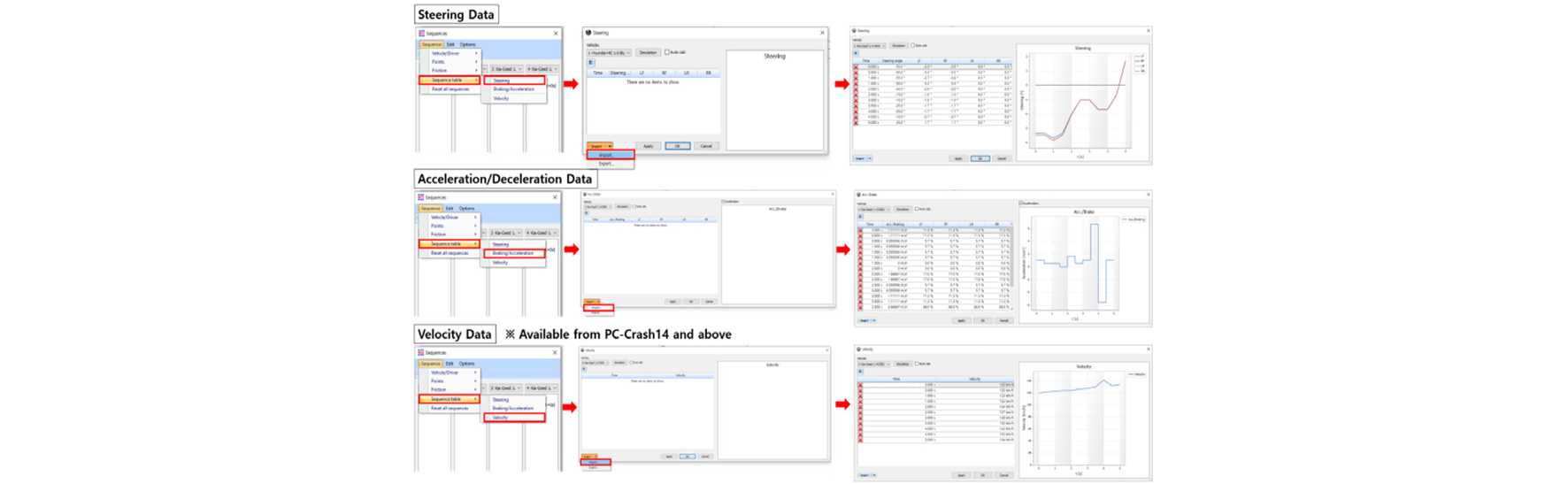
본 연구에서는 EDR 데이터 분석 프로그램을 활용하여 기존의 수작업 입력 방식 대신, Fig. 4와 같이 PC-Crash에 EDR 데이터를 한 번에 입력할 수 있도록 하였다. 그 결과, 사고 재구성 시뮬레이션을 위한 데이터 가공과 입력에 소요되는 시간을 줄일 수 있었고, 휴먼 에러의 가능성도 감소시킬 수 있었다.
3.3. 사고 영상 동기화
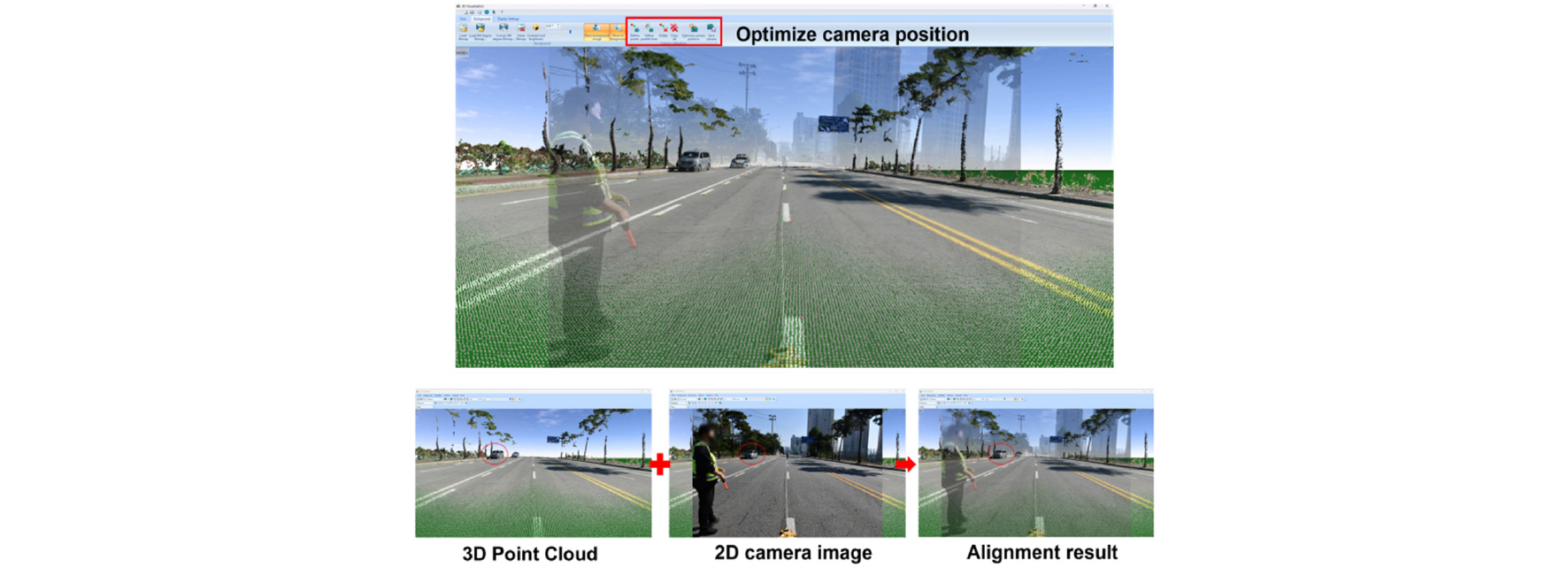
앞선 사고 현장 모델링과 차량 주행 해석이 완료되면, 실제 사고 영상과의 정합성을 보여주기 위해 동기화 과정이 필요하다. 이를 위해 Fig. 5와 같이 사고 현장 결과를 기준으로 실제 사고 영상의 카메라 위치를 최적화하여 보정하는 작업이 선행된다. 예를 들어, 3차원 포인트 클라우드에서 사고 영상을 보정하기 위해 각 데이터에서 동일한 특징점(점선 꼭짓점, 표지판 등)을 선택한 후 최적화 버튼을 누르면 PC-Crash 상에서 카메라 위치가 이동하게 된다.
카메라 영상에서 왜곡이 심한 경우, 격자판을 이용한 보정 작업이 필수적이다. 카메라 최적화 과정을 완료하면, Fig. 6과 같이 실제 사고 영상과 프로그램상의 주행 환경이 동일한 카메라 시점에서 관찰되어 차량 주행 결과의 정합성이 향상된다.
4. 실사고 기반의 사고 재구성 결과
본 연구에서는 실사고 차량의 EDR에 기록된 ESC의 작동 여부와 차량 속도를 기준으로 실사고 사례를 구분하였다. ESC 미작동 사례는 차량 속도가 50 km/h 이하인 저속 사고와 100 km/h 이상의 고속 사고로 구분하였다. 구분한 세 가지 실사고 사례를 PC-Crash로 재구성하고, 재구성한 결과와 사고 영상 그리고 EDR을 비교하여 사고 재구성 정확도를 분석하였다.
PC-Crash 해석 시 입력 데이터와 해석 모델은 [가감속도, 조향핸들 각도, Kinematics model, 빨간색 차량], [가감속도, 조향핸들 각도, Kinetics model, 파란색 차량], [속도, 조향핸들 각도, Kinetics model, 초록색 차량]의 세 가지 조건으로 해석하고, EDR 데이터에 기록된 차량 속도, 조향 핸들 각도, 주행 경로 등을 분석하였다.
4.1. Case 1: 50 km/h 이하(ESC 미작동)
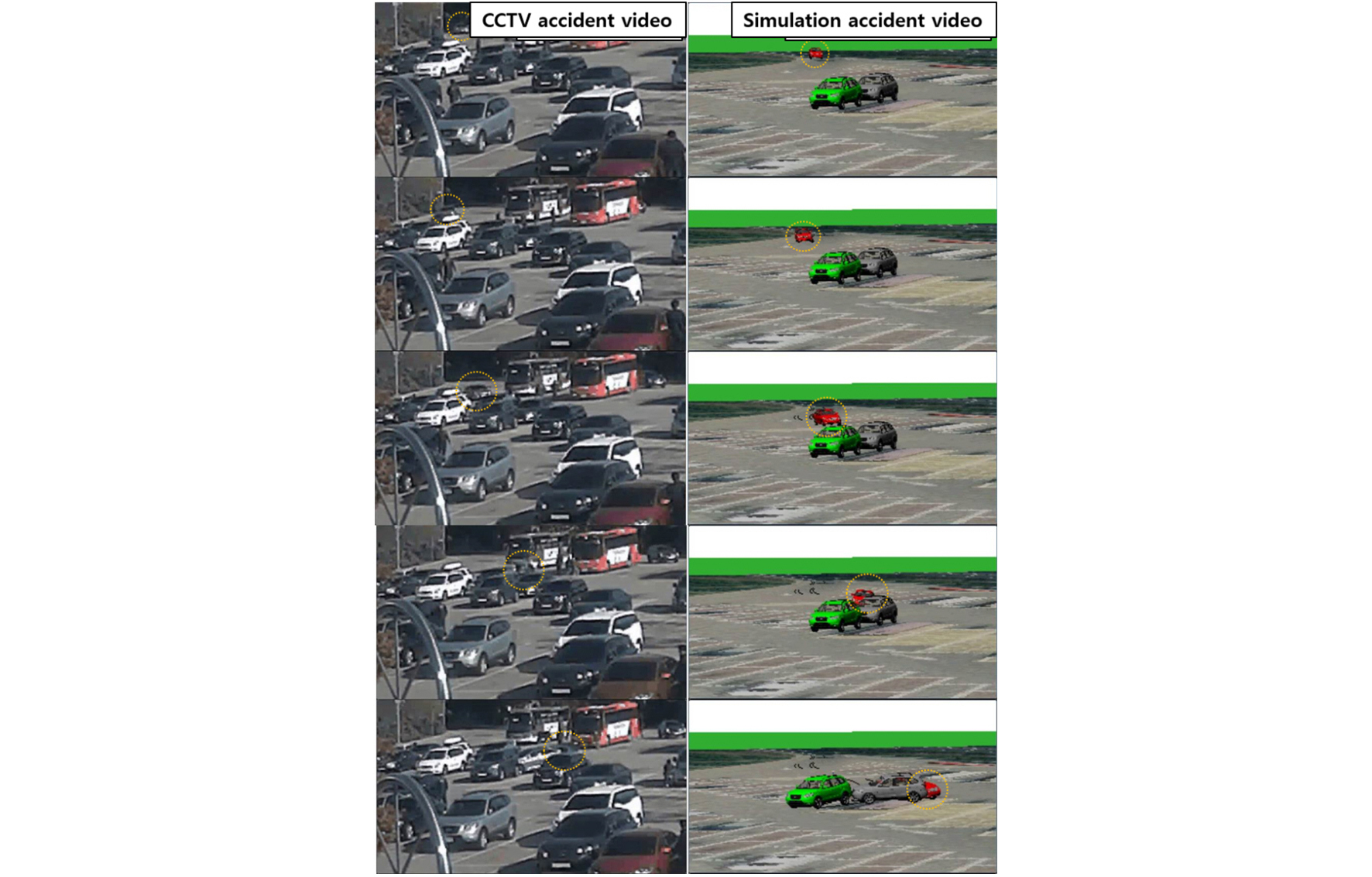
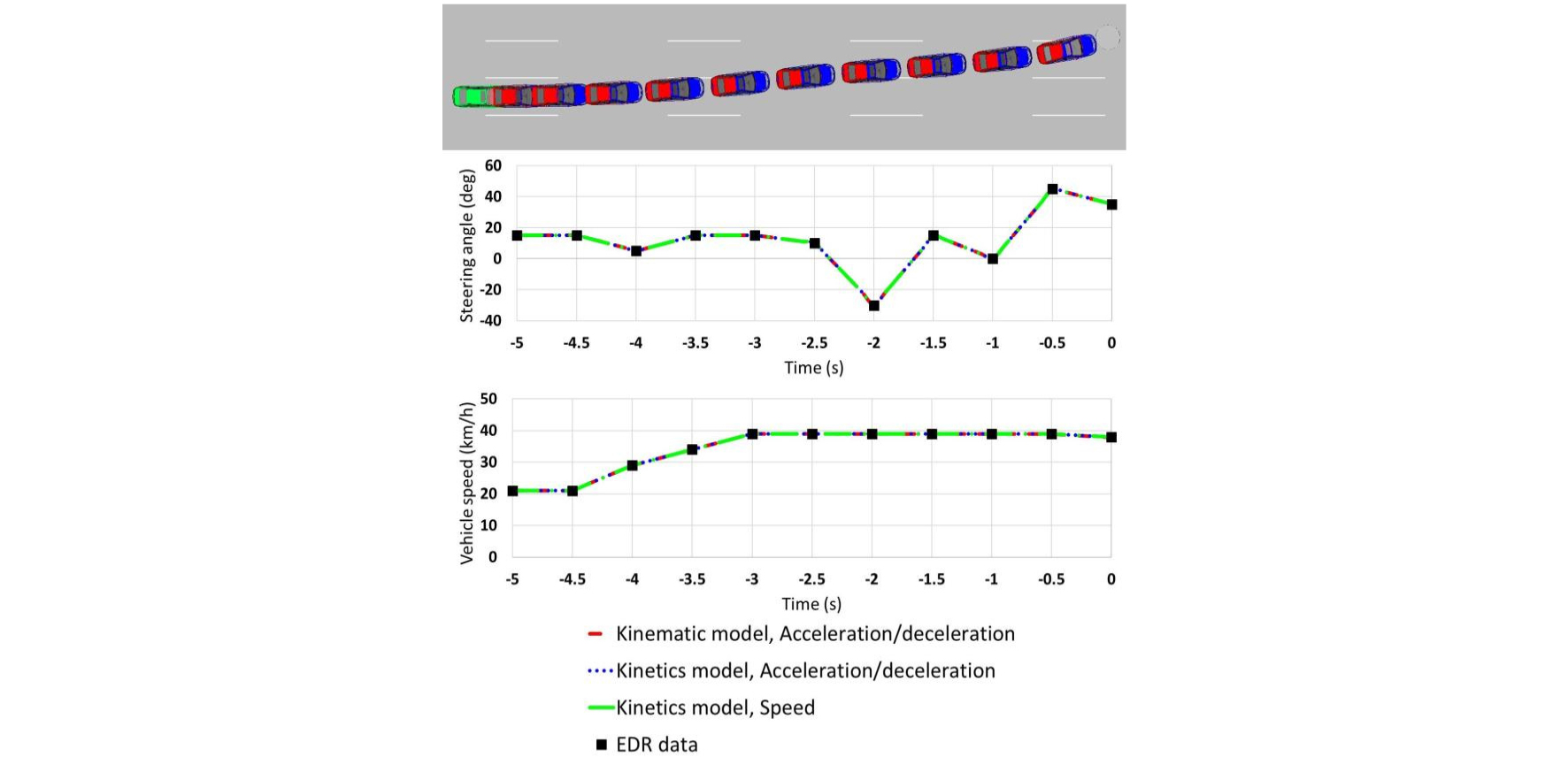
본 사례는 Fig. 7과 같이, 지하 주차장에서 주행 중인 차량이 주차장 기둥을 충격한 사고로, EDR 데이터에 기록된 사고 이전 최대 차량 속도는 39 km/h이다.

Case 1을 해석한 결과, PC-Crash에 입력한 데이터에 따른 가감속도 또는 속도에 따른 결과는 거의 유사하였으며, 차량의 주행 경로는 Fig. 8과 같이 충돌 직전 약간 좌조향하는 형태를 보였다. 해석 모델 및 입력 데이터의 종류에 따른 결과 편차는 크지 않았으며, 각 조건에 따른 해석 결과와 EDR 데이터의 차량 속도를 비교할 때 오차는 최대 0.5% 이하로 매우 작았다.
4.2. Case 2: 100 km/h 이상(ESC 미작동)
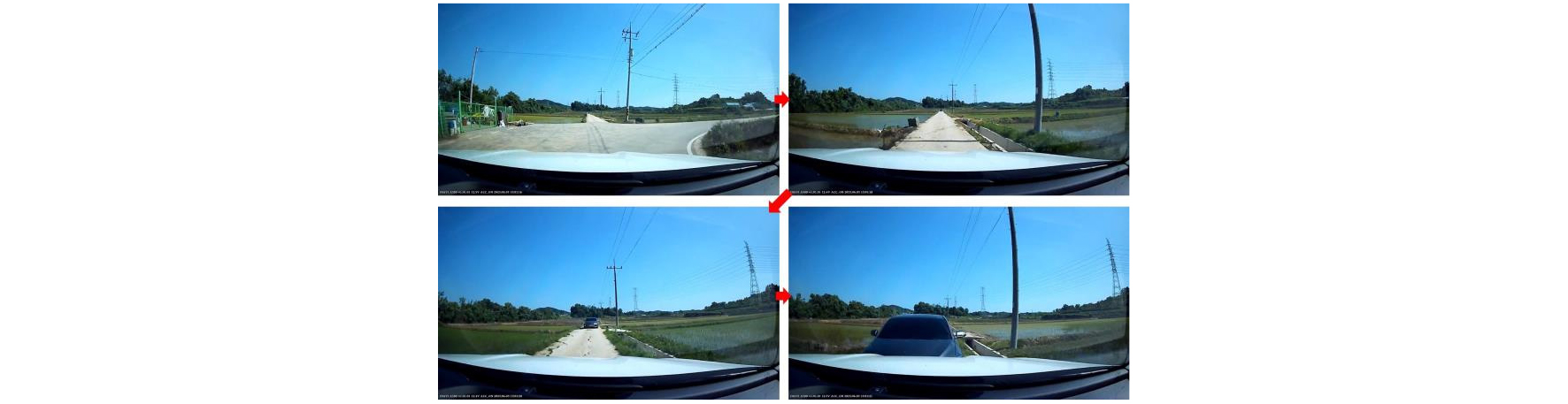
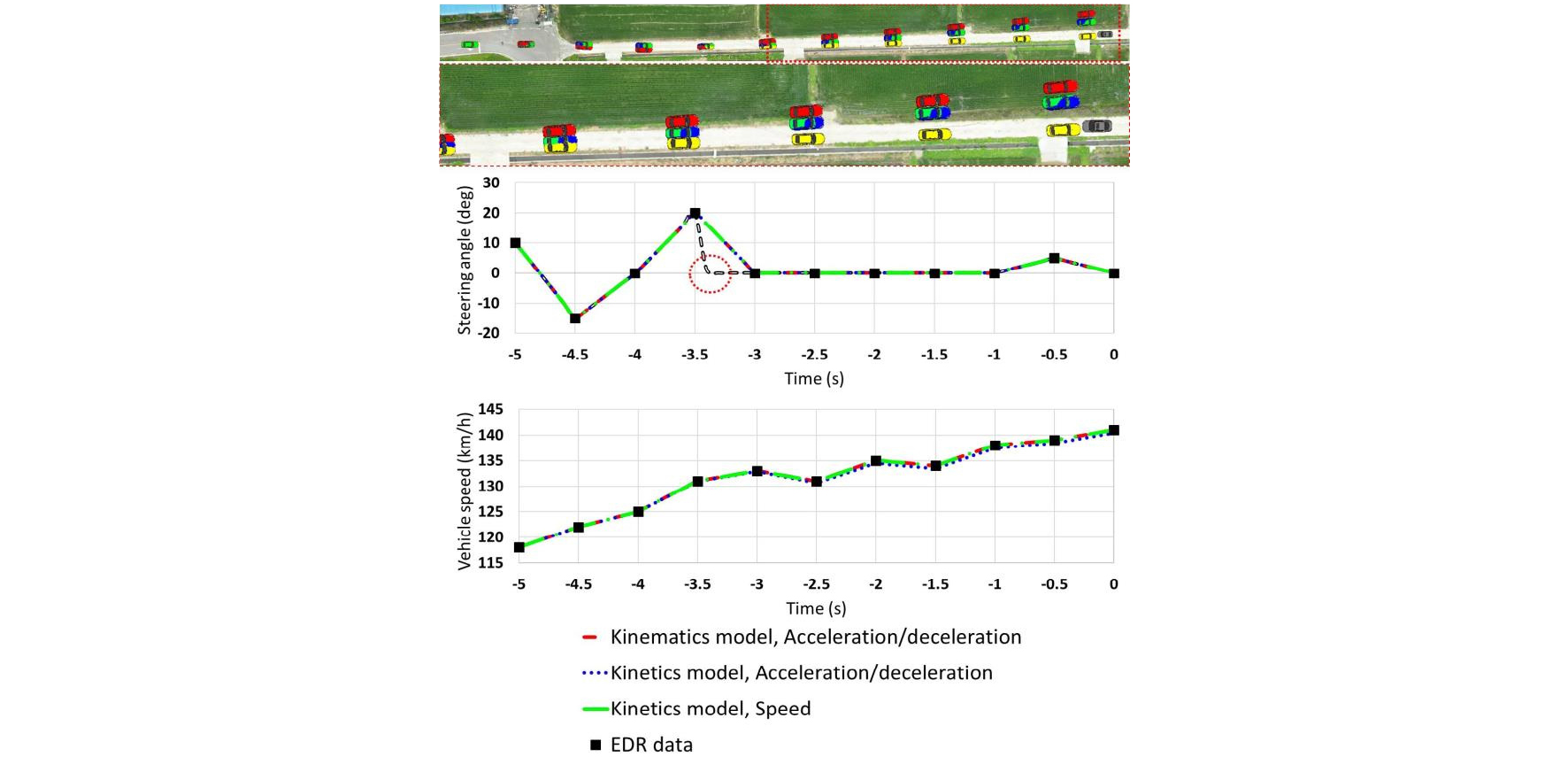
본 사례는 Fig. 9와 같이, 차량이 농로를 주행하다 정차된 다른 차량을 정면으로 충돌한 사고로, EDR 데이터에 기록된 사고 이전 최대 차량 속도는 141 km/h이다.
Case 2와 같은 고속주행 데이터의 경우, Kinematics model(빨간색 차량)과 Kinetics model(파란색, 초록색 차량) 간의 차량 주행 경로에 편차가 발생한다. Kinematics model의 경우, 상대적으로 더 큰 곡률을 보이며, 이는 Kinematics model이 횡방향 슬립 각도의 영향을 고려하지 않고 마찰력은 종방향 타이어 힘에만 영향을 미치기 때문에 기하학적 조건으로 계산되는 곡률이 실제 차량의 물리적 가능 범위보다 클 수 있기 때문으로 사료된다.
Kinetics model도 실제 계측한 사고 현장 경로에서 일부 벗어나는 결과가 확인된다. 이는 실제 차량과 사고 재구성에 사용한 차량 모델의 오차, 또는 조향 핸들 각도가 0.5초 간격으로 저장되어 실제 조작 각도와 편차가 발생하였을 가능성이 있다. PC-Crash에서 Fig. 10과 같이 -3.5초와 -3.0초 사이의 조향 핸들 각도의 0도 변화 시점을 앞당기면, 차량의 주행 경로(노란색 차량)가 실사고 경로와 더 유사해진다. 따라서, 고속주행 상황에서 발생한 사고의 경우, PC-Crash에서 조향 핸들 각도 입력 시 0.5초 간격을 적절히 보간하는 방법에 대한 고려가 필요하다.
4.3. Case 3: 100 km/h 이상(ESC 작동)
본 사고는 Fig. 11에 나타난 바와 같이, 자동차 전용 도로를 고속으로 주행하던 차량이 고가다리 아래에서 앞서 주행 중이던 차량의 후미를 추돌한 상황이다. EDR 데이터에 따르면 사고 이전 최대 차량 속도는 164 km/h였으며, -2.0초에서 -1.0초 사이에 ESC가 작동한 것으로 기록되었다. 또한, 영상에서는 차량이 주행 중 롤링하는 장면이 확인된다.

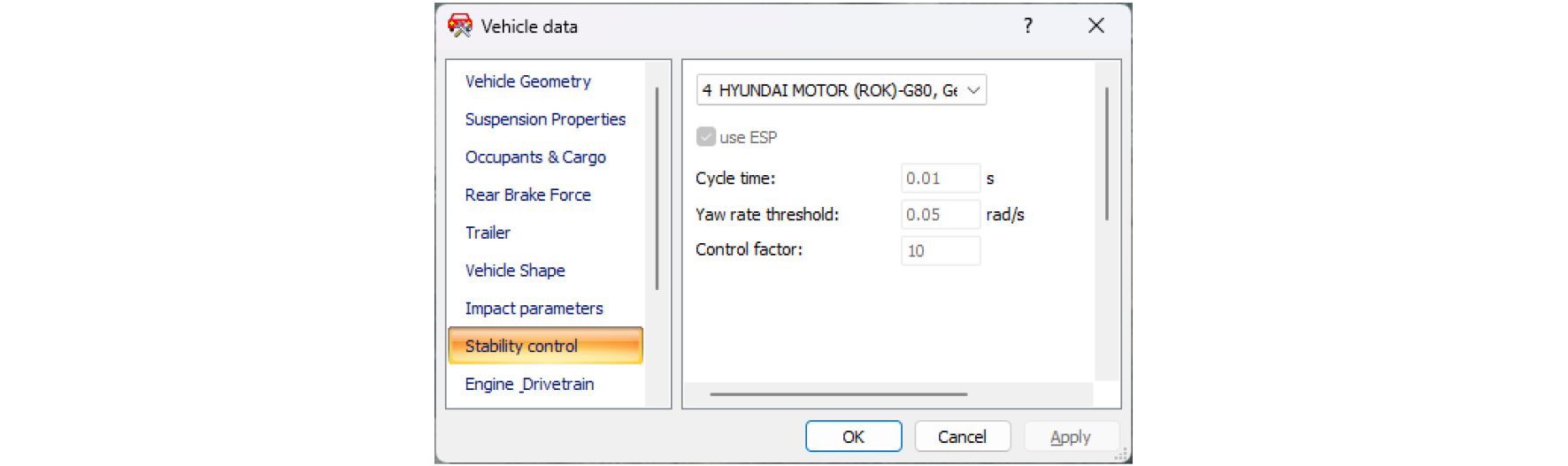
Case 3의 ESC 작동 상황에서는 Fig. 12와 같이 입력 조건에 따른 해석 결과에서 큰 편차가 발생한다. 먼저, Kinematics model(빨간색 차량)은 Kinetics model보다 현저히 큰 곡률을 보이는데, 이는 고속상황에서는 횡방향 슬립 각도의 영향을 고려하지 않는 Kinematics model 해석은 실제보다 더 큰 곡률 결과를 보일 수 있음을 의미한다. 다음으로 사고 전 차량의 불안정한 거동으로 ESC가 작동하는 상황에서는 사고 재구성 결과에 편차가 발생할 수 있음을 확인하였다. Kinetics model도 사고 재구성 결과 차량의 경로와 실제 사고 영상에서 차량의 주행 경로에 오차가 발생하였는데, 이는 ESC 동작으로 차량의 안정성이 제어되는 상황을 차량 모델에 반영하지 못하여 발생한 것이다. PC-Crash에는 Fig. 12와 같이 ESC를 시뮬레이션할 수 있는 자체 모델을 제공한다. 요레이트 임계값, 업데이트 주기(Cycle time) 및 제어 계수(Control factor)를 입력하고, 입력된 값에 따라 안전성 제어 장치의 반응 속도와 강도를 결정한다.
그 결과, Fig. 13과 같이 PC-Crash의 안정성 제어 기능을 활성화하면 (노란색 차량) 실제 사고 경로와 재구성 경로의 오차가 감소한다. 다만, PC-Crash의 안정성 제어 기능은 실제 차량의 제어와 차이가 있을 수 있어 사용 시 사고 영상과 EDR 데이터를 함께 고려해야 한다.
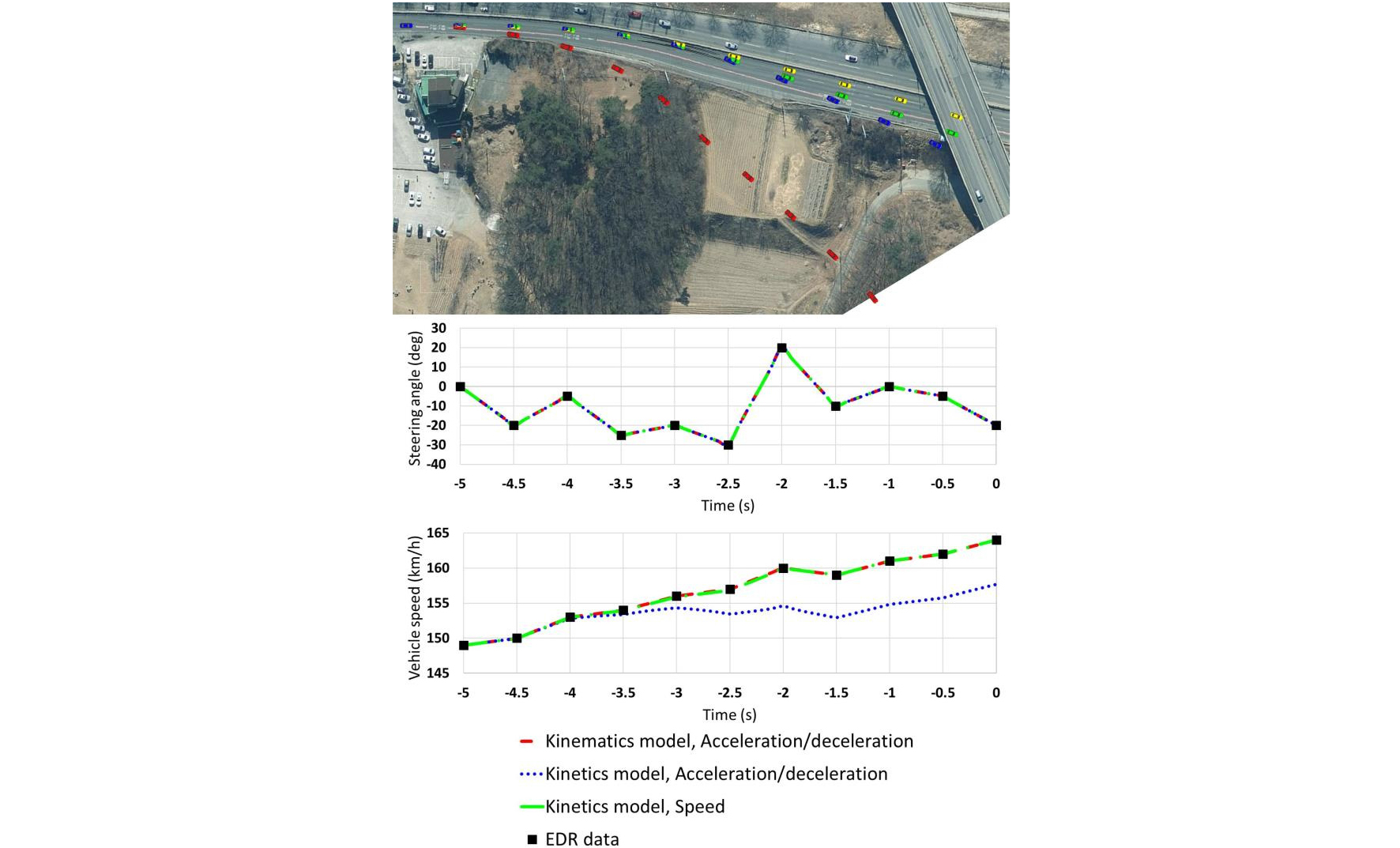
마지막으로, 가감속도로 입력하여 Kinetics model(파란색)로 해석한 결과, 차량 속도가 실제 EDR에 기록된 값보다 낮게 나타났으며, 특정 구간(-3초에서 -2.5초)에서는 오히려 감속하는 결과를 보였다. 이는 EDR에 기록된 차량 속도로 역산한 가감속도가 차량이 정상 상태로 주행할 상황을 가정했기 때문이며, 고속주행 및 조향으로 차량 거동이 한계에 도달한 상황에서는 EDR에 기록된 차량 속도를 추정하기 위해 더 큰 가감속도 값이 있어야 했을 것으로 사료된다.
5. 결 론
본 연구에서는 EDR 데이터를 효과적으로 분석하기 위한 전용 프로그램을 개발하고, 이를 활용한 사고 재구성 방법을 제시하였다. 또한, 사고 사례를 차량 속도 및 ESC 동작 유무에 따라 분류하고, 해석 조건에 따른 결과를 비교하여 주의사항과 한계점을 살펴보았다. 연구 결과를 요약하면 다음과 같다.
1) EDR 보고서를 Excel 형식으로 저장하고 주요 데이터를 효과적으로 가시화할 수 있는 전용 프로그램을 개발하고, 이를 통해 PC-Crash에 필요한 입력 파일 생성을 자동화하였다.
2) 사고 재구성 과정을 사고 현장 모델링, 사고 데이터 입력, 사고 영상 동기화의 순서로 제시하였다. 그리고 각 과정에 필수적인 장비와 프로그램을 소개하였으며 사용 방법을 체계적으로 정리하였다.
3) 실제 사고 사례를 차량 속도 및 ESC 동작 유무에 따라 구분하고, PC-crash 입력 데이터와 해석 모델에 따른 사고 재구성 결과를 실제 사고 상태와 비교 분석하였다. 50 km/h 이하의 저속 상태에서는 입력 데이터와 해석 모델 간의 결과 편차가 작은 것을 확인하였다.
4) 차량 속도가 100 km/h 이상인 고속주행 상태와 ESC가 작동하였을 때 PC-Crash의 입력 데이터와 해석 모델에 따라 큰 편차가 발생함을 확인하였다. 편차 감소를 위하여 PC-Crash에 차량의 동적 특성을 반영하는 Kinetics model을 사용하고 속도를 입력 데이터로 사용하여 사고를 재구성하는 방법이 필요하다. 또한, 0.5초 간격의 조향각 데이터를 보간하고, 차량 안정성 기능 활성화를 적용하여 실제 사고와 유사한 사고 재구성 결과를 도출하였다.
