

기호설명
1. 서 론
2. 차량 모델 및 파라미터 추정기
2.1. 차량 모델
2.2. 모델 파라미터 추정
3. 모델 예측 제어기 설계
3.1. 차량 상태 예측 모델
3.2. Reference trajectories
3.3. 최적화 문제 정의
4. 시뮬레이션 결과
4.1. Open-loop sine with dwell
4.2. Closed-loop double lane change
5. 결 론
기호설명
δf: 앞바퀴 조향각
αf / αr: 전/후륜 타이어 슬립각
Vx: 차량의 종방향 속도
γ: 무게중심에 대한 회전속도
β: 차량의 횡 방향 슬립앵글
lf: 차량 무게중심과 앞 바퀴사이 거리
lr: 차량 무게중심과 뒷 바퀴사이 거리
Iz: 차량 중심에 대한 요 회전 관성
twr: 뒷 두 바퀴 사이의 거리
reff: 타이어의 유효 반지름
Mz: 요모멘트
Cf / Cr: 전/후륜 코너링 강성
Kus: 언더스티어 경향성
λi: 휠슬립률
Fy,i: 타이어 횡방향 힘
Fx,i: 타이어 종방향 힘
wi: 바퀴 속도
1. 서 론
독립 샤시 모듈 제어와 비교해서, 여러 샤시 모듈을 통합 제어하는 것은 차량의 핸들링 성능과 동적 안정성을 더욱 높은 수준으로 개선할 수 있다. 특히, 샤시 통합 제어를 통해서 고속 상황에서의 선회 성능을 더욱 효과적으로 개선할 수 있다. 통합 샤시 시스템은 단순히 독립 샤시 모듈을 합한 것이 아니다. 각각의 샤시 제어 시스템이 서로 영향을 미칠 수 있기 때문에, 각 샤시 모듈간의 상호 작용을 고려하여 제어기를 설계하는 것이 요구된다.(1)
여러 샤시 모듈 중에서 토크벡터링과 후륜조향 시스템의 통합 제어를 하는 것이 본 논문에서 다루는 범위이다. 토크벡터링 시스템은 차량의 좌우에 다른 휠토크를 인가함으로써 차량의 선회 성능을 개선시킬 수 있으며, 후륜 조향 시스템은 운전자에 의한 전륜 조향각 이외에 후륜에 추가적인 조향각을 인가하여 차량의 횡방향 거동을 개선시킬 수 있다.(2) 그러나 두 시스템은 모두 차량의 횡방향 거동에 영향을 미치므로 이를 고려하여 통합제어하는 것이 중요하다.
모델 예측 기법(Model predictive control, MPC)을 활용하는 것은 이러한 문제를 해결하는 방안이 될 수 있다. 모델 예측 기법의 주요 장점은 차량의 모델을 활용하여 차량의 제어 입력이 차량 거동에 미치는 영향을 예측하며, 이를 제어에 활용할 수 있다는 점이다. 또한, 통합 제어 시 여러 제어 입력 간의 영향을 고려하여 제어기 설계에 활용하기에 적합하다.(3)
본 연구의 주요 목적은 모델 예측 제어 기법을 이용하여 토크벡터링과 후륜조향 통합 제어 알고리즘을 설계하고, 이를 이용해 차량의 선회 성능을 개선하는 것이다. 제어 목표는 차량의 요레이트 및 횡슬립각의 에러를 최소화하는 것이다. 또한, 목표 요레이트 및 횡슬립각의 미래 변화 궤적을 고려하기 위해 Reference trajectory 모델을 적용하였고, 제어 입력의 채터링을 줄이기 위해 비용 함수에 추가적인 항을 추가하였다. 제안된 제어 알고리즘의 성능을 확인하기 위해 카심과 시뮬링크를 활용하여 시뮬레이션을 진행하였다. 시뮬레이션 시나리오는 제어 전후의 선회 성능을 비교하기 위해 open-loop sine with dwell scenario와 closed-loop double lane change scenario를 선정하였다. 제안된 제어기는 차량의 선회 성능을 개선시킬 수 있다는 것을 시뮬레이션 결과를 통해 확인할 수 있었다.
2. 차량 모델 및 파라미터 추정기
본 연구에서는 제안된 모델 예측 제어기를 설계하기 위하여 선형화된 Bicycle model을 사용하였다.(4) 왜냐하면 토크벡터링 및 후륜조향 시스템은 차량의 종방향 거동에 크게 영향을 미치지 않고, 선형화된 모델을 사용하면 비선형 모델에 비해서 최적 제어 입력을 계산하는 시간을 줄일 수 있기 때문이다. 그러므로 본 연구에서는 선형화된 Bicycle model과 모델 파라미터를 실시간으로 추정하는 방식을 통해 차량 모델을 구성하였고, 이를 제어기 설계에 활용하였다.
2.1. 차량 모델
차량 모델은 선형화된 bicycle model을 사용하였다. 후륜 조향에 의한 추가적인 뒷바퀴 횡력 ΔFyr와 토크벡터링에 의한 추가적인 요모멘트 ΔMz를 포함한 bicycle model은 아래와 같이 표현할 수 있다.
위 식에서 차량의 앞뒤 타이어의 횡력을 Fyf=Cfαf와 Fyr=Crαr으로 선형화하면 아래와 같이 표현할 수 있다.
2.2. 모델 파라미터 추정
식 (3)의 bicycle model에서 차량 전후 타이어의 코너링 강성 계수는 주행 상황에 따라서 실시간으로 변화하기 때문에 이를 실시간으로 추정하는 것이 필요하다. 특히, 모델 예측 제어기를 활용할 때에는 모델이 실제 차량 반응에 비해서 부정확할 경우에 제어 성능이 악화될 수 있다.
그러므로 차량 전후 타이어의 코너링 강성 계수를 추정하기하기 위해 recursive least square 방법을 이용하여 아래와 같이 추정기가 설계되었다.(5)
또한, 위의 식 (4)에서 차량 전후의 타이어 횡력과 타이어 슬립각은 아래와 같이 계산되었다.
위의 수식에서 차량의 횡방향 및 종방향 속도는 일반적인 상용차량에서는 측정할 수 없으나, 본 연구에서는 차량에 DGPS 등이 장착되었을 경우를 가정하여 측정할 수 있다고 가정하였다.
3. 모델 예측 제어기 설계
모델 예측 제어기 설계를 위해 2장에서 소개된 연속적인(continuous) 차량 모델을 이산화(discretization)하여 제어기 설계에 활용하였다. 또한, 제안된 모델 예측 제어기의 제어 목표는 요레이트와 차량 횡슬립각의 에러를 최소화하는 것이다. 또한, 제어 입력의 채터링이 발생하는 것을 방지하기 위해 제어 입력값 변화에 대한 페널티 함수를 비용 함수에 추가하였다. 마지막으로, 차량의 과도응답 상태에서 순간적으로 과도한 제어 입력이 인가되는 것을 방지하기 위해, 요레이트와 횡슬립각의 에러에 대한 수렴 궤적(convergence trajectory) 모델을 적용하였다.
3.1. 차량 상태 예측 모델
식 (3)에서 소개된 연속시간 차량 모델은 아래와 같은 형태로 재정리할 수 있다.
위와 같은 연속시간 차량 모델을 이산화하면 아래와 같은 수식으로 표현할 수 있다.
위와 같이 정의된 이산화된 차량 모델을 기반으로 MPC solver을 이용하여 실시간으로 비용 함수를 최소화하기 위한 제어 입력 u=[ΔFyr ΔMz]T을 구하였다.
마지막으로, MPC solver에서 구해진 제어 입력은 아래와 같은 식을 기반으로 차량에 휠토크와 후륜조향각 입력으로 차량에 인가되었다.
위의 수식에서 Fyr은 타이어 횡방향 거동 및 후륜조향 제어 입력에 의해 발생하는 타이어 횡력이며, ΔFyr은 추가적인 후륜조향 제어입력에 의해 증가하는 타이어 횡력을 의미한다. 식 (9)에서 볼 수 있듯이, 토크벡터링에 의한 좌우 토크 인가량은 서로 동일하다. 또한, 후륜조향에 의한 후륜 횡력의 추가적인 변화는 후륜 조향각 입력과 선형적인 관계로 가정할 수 있다. 제어 인가량을 정리하여 표현하면 아래와 같다.
위의 식에서 후륜 코너링 강성 은 2.3장에서 소개된 추정기를 이용하여 실시간으로 추정된 값이다.
3.2. Reference trajectories
요레이트 및 횡슬립각의 목표값은 차량의 정상상태 선회를 가정하여 bicycle model을 기반으로 아래와 같이 정의될 수 있다.(4)
위와 같이 정의된 목표 요레이트와 횡슬립각을 이용하여 아래와 같은 reference trajectory를 정의할 수 있다.(6)
위의 reference trajectory는 요레이트와 횡슬립각의 에러가 exponential convergence한다는 가정 하에 세워진 모델이다. 수렴 속도는 세 개의 시상수 τs, τref,1, τref,2에 의해 정의된다. 또한, 식 (12)의 벡터들은 아래와 같이 정의된다.
3.3. 최적화 문제 정의
위에서 정의한 차량 모델과 reference trajectory를 기반으로 아래와 같은 비용 함수를 이용하여 finite-time constrained optimization problem을 정의할 수 있다.(7)
위의 비용 함수를 최소화하기 위한 제어 입력을 CVXGEN을 이용하여 실시간으로 계산하였다.(8)
4. 시뮬레이션 결과
위에서 제안한 제어 알고리즘은 Simulink/Carsim 소프트웨어를 이용하여 시뮬레이션 환경에서 구현되었다. 실험 시나리오는 open-loop sine with dwell scenario와 closed-loop double lane change scenario이다. 노면 조건은 드라이 아스팔트이고, 차량 파라미터는 Table 1과 같다.
Table 1.
Vehicle parameters for simulation
| Parameter | Value (unit) | Parameter | Value (unit) |
| m | 1960 (kg) | L | 2.84 (m) |
| lf | 1.32 (m) | lr | 2.52 (m) |
| Iz | 4660 (kg·s2) | reff | 0.332 (m) |
| twr | 1.630 (m) | SGR | 13.0 |
4.1. Open-loop sine with dwell
제안된 모델 예측 제어 알고리즘의 성능을 보여주기위해 드라이 아스팔트 노면에서 open-loop sine with dwell 실험이 진행되었다. 차량의 초기 진입 속도는 100kph, 노면 마찰 계수는 1.0으로 설정되었다. 제어를 적용하지 않은 경우(Base)와 제안된 제어 알고리즘을 적용한 경우가 비교되었다.
Open-loop sine with dwell 시나리오에 대한 시뮬레이션 결과는 Fig. 1과 같다. Fig. 1(a)-(d)는 차량 상태변수이고, Fig. 1(e)-(f)는 각각 토크벡터링과 후륜 조향 제어 입력이다. 각 제어 입력은 추가적인 휠토크 입력, 추가적인 후륜 타이어 조향각을 기준으로 표현되었다.
Fig. 1(a)에서 볼 수 있듯이, 동일한 차량 진입속도 100kph에서 동일한 전륜 조향입력값이 open-loop 입력으로 인가되었다. Fig. 1(b)에서는 제어 전과 비교해서 차량 슬립각이 확연히 줄어든 것을 확인할 수 있다. Fig. 1(c)에서는 요레이트의 반응성이 개선된 것을 확인할 수 있다. 이를 통해 제안된 제어기는 차량의 횡방향 안정성을 개선할 수 있다는 점을 확인할 수 있다.
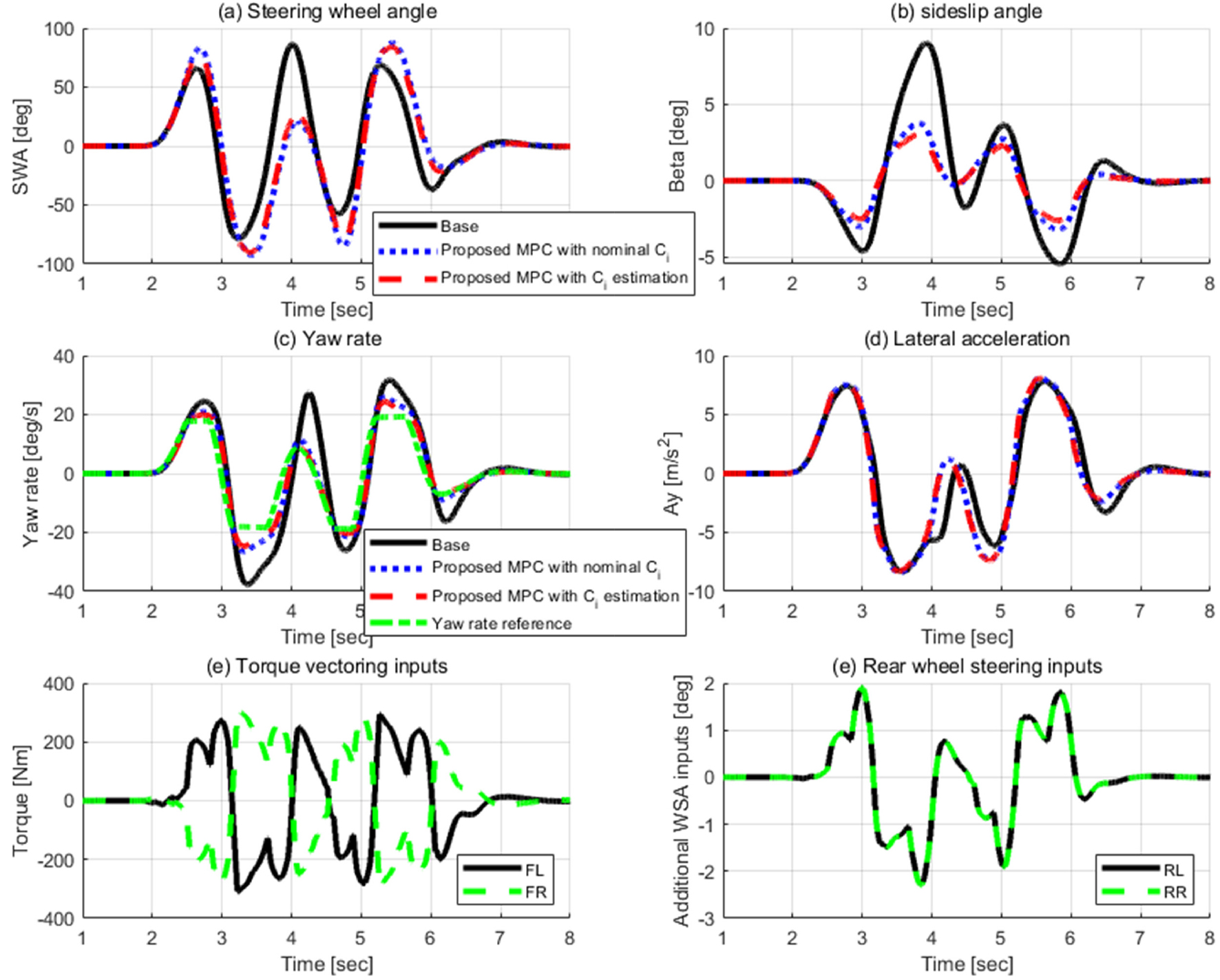
요약하자면, 차량의 속도와 조향각이 동일한 open-loop scenario에서 제안된 제어기는 차량의 선회 성능 및 요레이트/횡슬립각 반응을 개선할 수 있다는 것을 확인할 수 있다.
4.2. Closed-loop double lane change
과도 응답 상태에서의 제어 성능을 보여주기 위해 closed-loop double lane change에 대한 시뮬레이션이 진행되었다. 위의 시뮬레이션에서는 차량의 초기 진입 속도는 100kph, 노면 마찰 계수는 드라이 아스팔트 환경을 가능하여 1.0으로 설정되었다. 마찬가지로 제어를 적용하지 않은 경우와 제안된 제어기를 적용한 경우가 비교되었다.
Closed-loop double lane change 시나리오에 대한 시뮬레이션 결과는 Fig. 2와 같다. 이전 시뮬레이션 결과와 마찬가지로, Fig. 2(a)-(d)는 차량 상태이고, Fig. 2(e)-(f)는 각각 추가적인 휠토크로 표현된 토크벡터링 제어 입력과 추가적인 후륜 조향각 제어 입력이다.
Fig. 2(a)에서 볼 수 있듯이, 4초와 6초에서 카운터 스티어링을 위한 조향각이 줄어든 것을 확인할 수 있다. 또한, Fig. 2(b)-(c)에서 볼 수 있듯이, 차량의 횡슬립각과 요레이트 반응이 제어 전에 비해서 비교적 안정화되었음을 확인할 수 있다. 특히, 6초에서 6.5초 부근에서 차량의 오버스티어 반응이 제어를 통해 개선되었음을 확인할 수 있다. 이를 통해서, 제안된 제어기는 closed-loop scenario 환경에서도 차량의 횡방향 안정성과 선회 성능을 개선할 수 있다는 점을 확인할 수 있다.
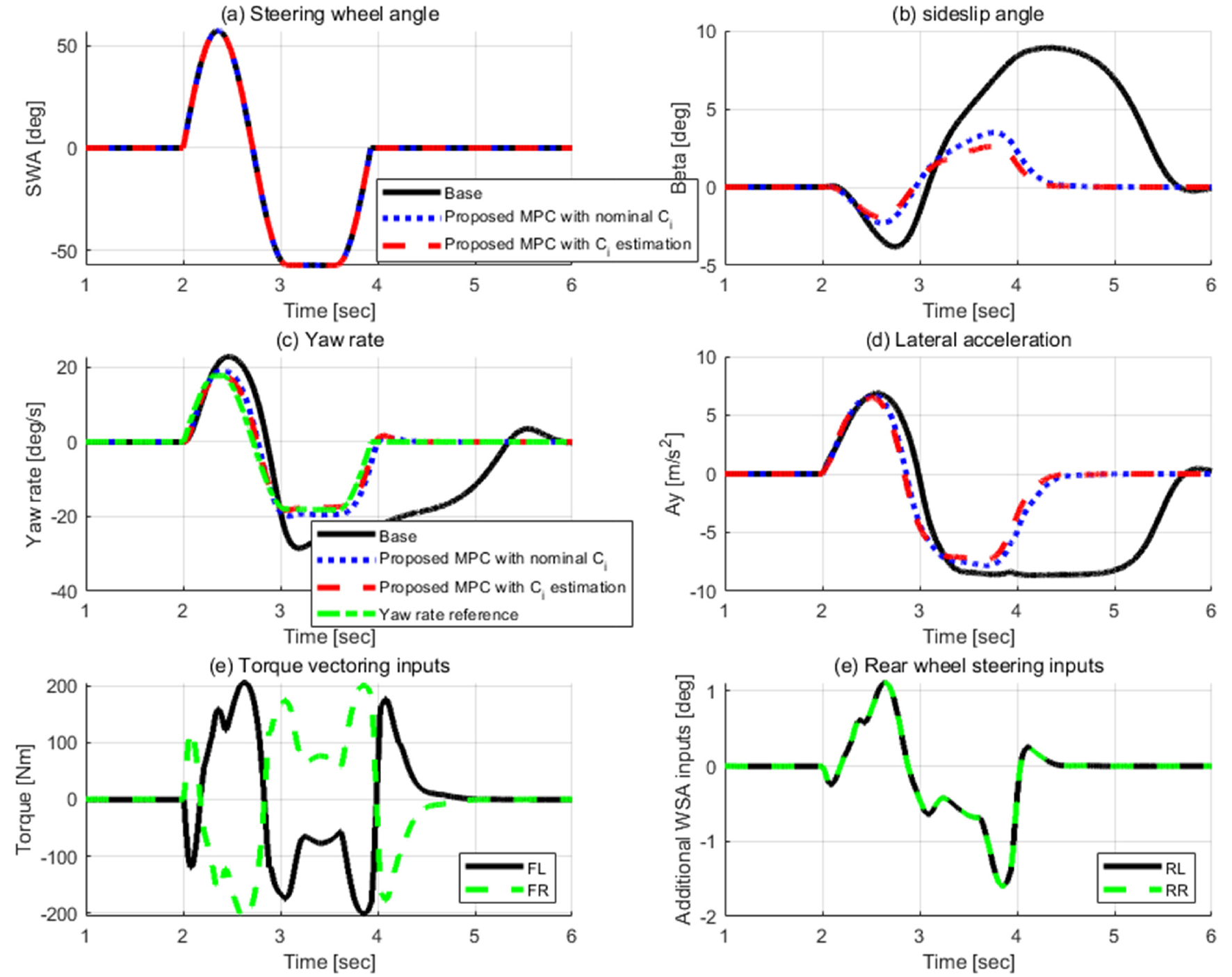
요약하자면, 주어진 경로를 추종하게하는 closed-loop scenario에서도 제안된 제어기는 차량의 선회 성능을 개선시킬 수 있다는 것을 확인할 수 있다.
5. 결 론
본 논문에서는 모델 예측 제어 기법을 이용하여 토크벡터링과 후륜조향의 통합제어 알고리즘을 제안하였다. 제안된 알고리즘의 제어 목표는 요레이트와 차량 슬립각의 에러를 최소화하며, 차량의 선회 성능을 개선하는 것이다. 또한, Reference trajectory 모델을 이용해서 다음 스텝의 에러의 변화를 예측하였다. 제안된 알고리즘의 성능은 시뮬레이션을 통해서 검증하였다. 시뮬레이션 시나리오는 open-loop sine with dwell와 closed-loop double lane change를 선정하였다. 시뮬레이션 결과를 통해 제안된 제어기는 차량의 요레이트 및 횡슬립각 반응을 개선시킬 수 있다는 것을 확인할 수 있었다.
그러나 본 연구에서는 적절한 제어 입력 제한에 대해서는 다루지 않았다. 특히, 한계 주행 상황에서의 과도한 제어 입력은 차량의 선회 성능을 악화시킬 수 있으므로, 타이어 마찰 한계를 고려한 입력 제한에 대해 연구되어야 할 것이다.
