

1. 서 론
모빌리티 시스템에는 구동, 조향, 서스펜션 등의 다양한 기능을 위해 모터와 같은 다수의 회전체들이 사용되어 왔다. 이러한 회전체들은 모빌리티 시스템의 마찰, 마모 특성에 의해 지속적으로 성능이 저하된다. 회전하는 물체의 성능 저하는 핸들링 및 주행 성능 저하로 이어지는 것은 물론 치명적인 사고까지 유발할 수 있다. 따라서 회전하는 물체의 상태 모니터링은 이동성 안전장치 및 유지관리 분야에 중요한 기술 중 하나로 다양한 연구들이 진행되고 있다. Riyang Yang 등은 릴럭턴스 모터의 파라미터 식별 문제 해결을 위해 전류와 저항에 대한 인덕턴스 파라미터의 수렴성을 고려한 재귀 최소 자승 알고리즘을 제안하였고,(1) Kellen O’Shea 등은 병렬 회로의 오차를 검출하고 회로의 라인 거리와 오차 저항을 추정하여 결함을 감지하였다.(2) Singh Vyoma 등은 시스템의 노이즈와 불확실성의 영향을 받는 파라미터와 상태 정보를 추정하기 위해 무향 칼만 필터와 재귀 최소 자승법을 이용하였다.(3) Zhao Yunfei 등은 산업 시스템 안전을 개선하고 시스템의 유지 비용을 절감하기 위한 방법론으로 실험 데이터 기반으로 시스템 모델의 성능 저하를 탐지하는 상태 모니터링 알고리즘을 제안하였으며,(4) Bhuiyan Rashid 등은 기계시스템의 진동 모니터링 알고리즘을 제안하고 평가 데이터를 기반으로 기계 수명과 품질 간의 관계를 설정하기 위한 저비용 센서 장치를 개발하였다.(5) Dang Hung 등은 센서 데이터 기반 모니터링 시스템에서 발생하는 데이터의 노이즈에 대한 성능 저하를 줄이기 위한 방법론으로 CNN과 LSTM을 융합한 학습 기반의 분류 알고리즘을 제안하여 안정적이고 신뢰도가 높은 데이터를 확보하기 위한 연구를 진행하였다.(6) 기존 연구들을 살펴보면 RLS를 이용하여 파라미터를 추정하는 방법들이 이용되었으며, 센서 또는 학습 데이터를 기반으로 상태를 모니터링하는 방법들이 개발되었다. 하지만 센서 및 학습 데이터 기반의 건전성 모니터링은 적용 시스템의 변화에 따라 모니터링 성능이 저하되는 한계점이 있다.
기존 연구 조사를 통하여 본 논문에서는 다중 RLS 알고리즘을 기반으로 이동을 위해 회전하는 물체의 상태를 모니터링하는 방법을 제안한다. 회전 역학을 이용하여 불확실성 및 파라미터 추정을 통해 시스템의 건전성을 모니터링한다. 따라서, 제안하는 알고리즘은 회전체에 대한 수학적 모델 설계를 통하여 범용성에 대한 한계점을 극복할 수 있다. 제안하는 다중 RLS 기반 건전성 모니터링 알고리즘의 성능 평가는 Matlab /Simulink 환경에서 수학적 DC 모터 모델을 이용하여 진행하였다. 파라미터 추정을 위하여 본 논문의 나머지 부분은 아래와 같이 구성되었다. 2장에서는 회전체 상태 모니터링 알고리즘에 대해 기술한다. 3장에서는 제안하는 알고리즘의 성능 평가 결과에 대해 기술하며, 4장에서는 결론 및 향후 계획에 대해 기술한다.
2. 회전체 상태 모니터링 알고리즘
Fig. 1은 본 논문에서 제안하는 다중 RLS 기반 건전성 모니터링 알고리즘의 전반적인 모델 개략도이다.

회전체의 건전성을 모니터링하는 방법론으로 다중 RLS 기반 불확실성 및 매개 변수를 추정한다. 제안하는 알고리즘은 모터의 공칭값을 이용하여 불확실성을 추정하는 단계와 추정된 불확실성을 이용하여 파라미터의 변화를 추정하는 단계로 구성되었다. 파라미터의 변화 추정 단계에서 모터 토크 상수와 역기전력 상수의 값이 동일한 특성을 이용하여 RLS의 추정 파라미터의 개수를 축소하였다. 정량화된 건전성 모니터링을 위하여 추정된 파라미터 변화를 이용하는 성능 지수를 설계하였다.
2.1. RLS 기반 불확실성 추정
본 연구는 성능 평가를 위하여 Fig. 2의 DC 모터 시스템을 플랜트로 설계하였다. 뉴턴의 제2 법칙과

키르히호프의 전압 법칙에서 각각 식 (1)과 (2)가 도출되었다. DC 모터의 모든 파라미터는 불확실성을 포함한다. 재귀 최소 자승법을 이용하여 공칭값에 대한 변화량으로 정의된 불확실성을 추정하기 위해 식 (1)과 (2)를 식 (3)과 같이 정리한다.
식 (1)과 (2)에 대한 위 식의 출력 인자, 회귀 인자 및 추정값은 각각 식 (4)와 (5)로 정의되었다.
회전하는 물체의 건전성 모니터링을 위하여 추정한 θ1, θ2는 시변하는 상태량을 포함하고 있으므로, 실시간 특성을 반영하는 추정을 위하여 망각인자를 적용하였다. 망각인자 λ (0 < λ < 1)를 적용한 재귀 최소 자승법의 목적 함수는 아래와 같다.
추정값 갱신을 위한 이득값 L과 공분산 P는 각각 식 (7), (8)과 같은 계산을 통해 실시간으로 갱신된다.
2.2. RLS 기반 파라미터 변화 추정 및 성능 지수 설계
본 절에서는 2.1절에서 추정된 불확실성을 이용하는 파라미터 변화 추정과 추정된 파라미터 변화를 이용하는 성능 지수 설계를 다룬다. 앞서 회전체의 불확실성을 포함한 수학적 모델을 설계하여 상태량과 모터 파라미터로 이루어진 θ1, θ2를 추정하였다. 추정된 불확실성을 이용하여 망각인자가 적용된 재귀 최소 자승법을 통해 파라미터의 변화를 아래의 수식을 적용하여 추정할 수 있다. 이때, MKS 단위계에서 DC 모터의 토크 상수와 역기전력 상수값은 동일하므로, 운동 방정식에서 추정되는 토크 상수를 전압 방정식에 역기전력 상수로 이용할 수 있다.
식 (10)과 같이 파라미터 변화 추정을 위한 가상 관계 함수를 설계하였다. 식 (11)과 (12)는 순서대로 출력 인자, 회귀 인자 및 추정값이다. 식 (12)에서 역기전력 상수와 토크값은 값의 크기가 동일하므로 합을 통해 소거된다. 추정값은 식 (7), (8), (9)에 의해 갱신된다. 회전체의 성능 저하를 정량화하기 위하여, 추정된 파라미터의 변화를 이용하는 성능 지수를 설계하였다. 성능 지수는 다음 조건과 방정식을 이용하여 계산된다.
여기서, xmin은 성능 지수 PI의 최소 임계값, xmax는 최대 임계값이다. 식 (12)과 같이 실시간 파라미터 변화량이 설계된 최소 임계값 보다 작으면 회전체는 정상으로 간주한다. 식 (15)는 파라미터의 변화량이 설계된 최대 임계값 보다 큰 경우로, 성능 지수는 0이다. 파라미터 변화량이 식 (14)에 임계값 조건을 만족하면, 설계된 방정식을 기반으로 성능 지수가 계산된다.
3. 성능 평가
Fig. 3은 성능 평가에 이용된 디스크가 탈부착 가능한 DC 모터 시스템을 보여준다. 실 DC 모터 시스템을 고려하여 가상 성능 평가 시스템의 파라미터를 결정하였다. Table 1은 이용된 모터의 물성치를 보여준다. Table 2는 평가 시나리오를 보여준다. Case 1은 파라미터의 변화 추정 평가 결과, Case 2는 실 DC 모터의 외란을 고려하는 평가 결과, Case 3은 지수 도출 평가 결과를 보여준다.

Table 1.
Parameters for DC motor
| Parameter | Description | Value |
| L(mH) | Inductance | 1.6 |
| R(Ω) | Resistance | 8.4 |
| kt(Nm/A) | Torque constant | 0.042 |
| ke(V/(rad/s)) | Back-emf constant | 0.042 |
| J(kgm2) | Rotational inertia | 2.09×10-5 |
Table 2.
Parameters for DC motor
모든 평가는 정현파로 제어 입력을 인가하였으며, Table 3은 설계된 가상 DC 모터 시스템에 임의적으로 인가한 파라미터 변화량을 나타낸다. 제안하는 회전체 건전성 모니터링 알고리즘은 식 (4), (5), (11), (12)와 같이 4개의 재귀 최소 자승법을 이용한다. Table 4는 Case 1에서 적용된 알고리즘의 변숫값들을 보여준다.
Table 3.
Parameters for DC motor
Table 4.
Used parameters for recursive least square
Fig. 4는 Case 1의 평가 결과를 보여준다. (a)와 (b)는 제어 입력과 Matlab/Simulink 환경에서 설계된 가상 DC 모터의 상태량을 보여준다. (c)는 추정한 불확실성 결과를 보여주며 회전 운동방정식과 전압 방정식에 대한 불확실성이 각각 추정되었다. 설계된 모델에서 출력된 불확실성(실선)과 RLS 기반 추정된 결과(파선)를 비교하였을 때 합리적으로 추정하는 결과를 확인할 수 있다. 기계적 시스템에서 회전 관성, 감쇠계수, 토크상수의 추정 오차는 각각 약 -5×10-7, -2×10-6, 0.0005이며, 전기적 시스템에서의 저항, 인덕턴스 추정 오차는 약 0.0008, 0.0006이다. 오차 계산 방법은 2초 이후 오차 데이터의 평균값으로 계산되었다.
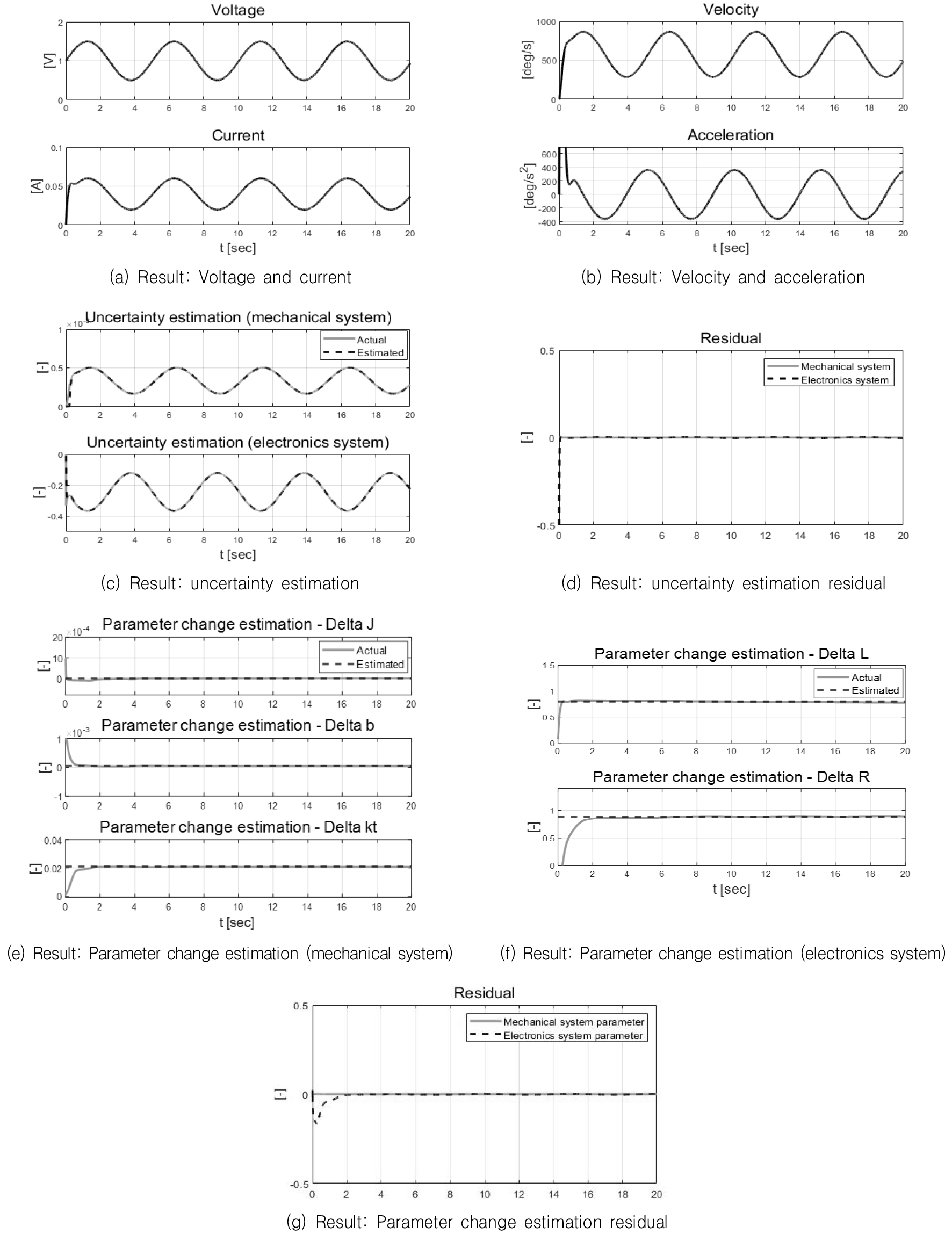
(d)는 이때의 회전 운동 방정식과 전압 방정식의 추정 잔차이다. (e)와 (f)는 (c)의 불확실성을 이용하여 RLS기반 추정된 파라미터 변화량(파선)이다. 모델 설계 시 임의적으로 적용한 파라미터 변화량을 합리적으로 추정하고 있음을 보여준다. (g)에서 추정 잔차는 약 2초 이후 0에 가까워지며 수렴하는 것을 확인할 수 있다.
Fig. 5는 실제 시스템에 존재하는 외란 적용을 통한 제안하는 회전체 건전성 모니터링 알고리즘의 검증 결과이다. Fig. 3의 DC 모터는 가상 평가 환경과 같이 물성치를 정량적으로 변화시키는 것에 한계가 있다. 따라서, 디스크의 회전 관성 공칭값을 이용하여 탈착 상태에 따른 파라미터 변화 결과를 확인하였다. 회전 디스크는 약 5초에 탈거되었다. Table 5는 Case 2에서 적용된 알고리즘의 변숫값들을 보여준다.
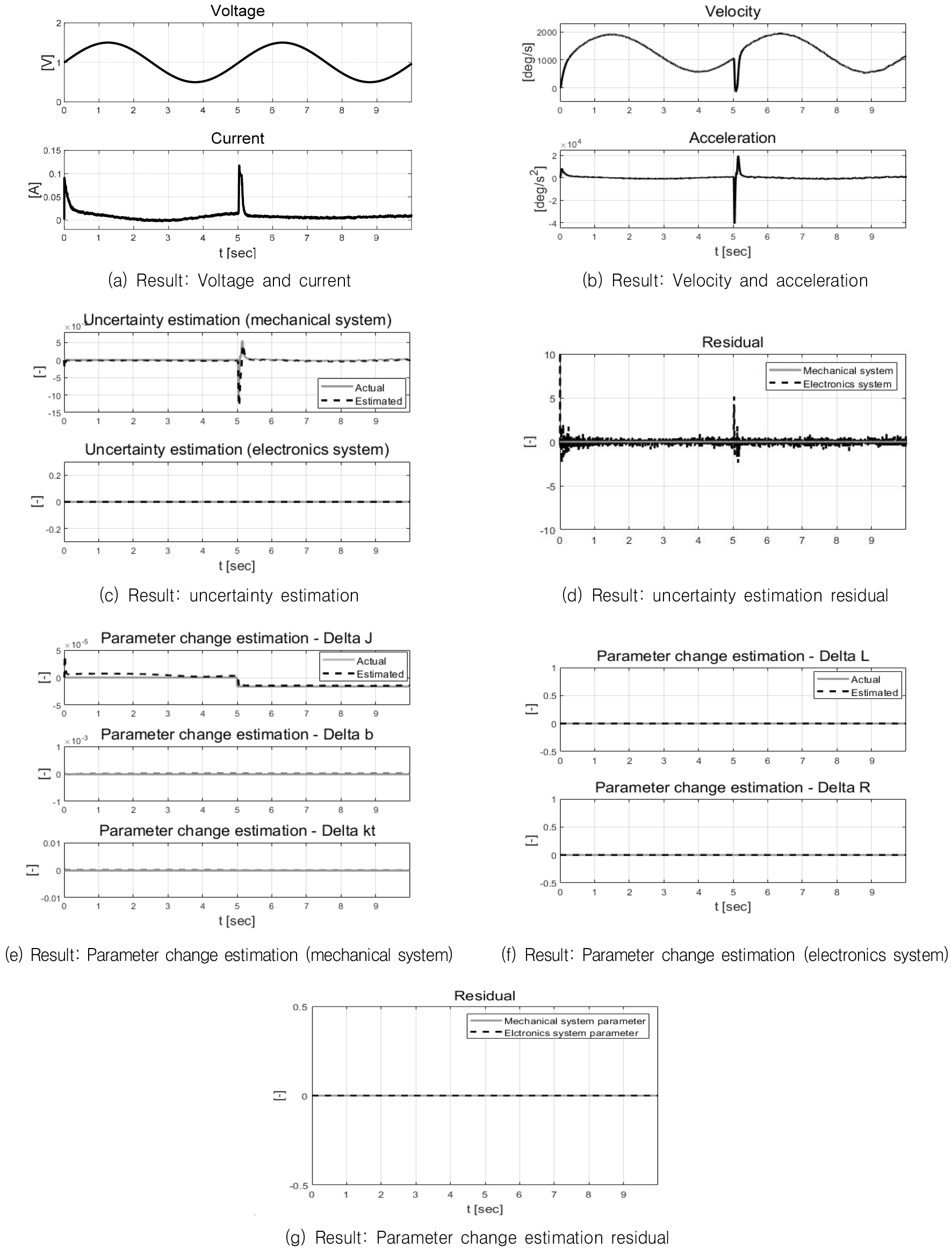
Table 5.
Used parameters for recursive least square
Fig. 5(a)와 (b)는 정현파로 인가된 제어 입력에 따라 실제 DC 모터에서 회전 엔코더와 전류 계측 센서를 이용하여 계측된 DC 모터의 상태량을 보여준다. 모터 플랫폼의 저장 데이터 제약에 따라 시뮬레이션 시간은 10초로 설정하였다. (c)는 추정된 불확실성 결과를 보여준다. 회전 디스크 탈거에 따라 회전 운동방정식의 불확실성이 추정되었으며, 이때의 추정 오차는 약 0.0002이다. 전압 방정식에 대한 불확실성 추정은 0으로 유지되는 결과를 보여준다. (d)는 이때의 추정 잔차이다. 실 시스템 이용 및 디스크 탈거에 따른 노이즈가 발생하는 것을 확인하였다. (e)와 (f)는 (c)의 불확실성을 이용하여 RLS기반 추정된 파라미터 변화량(파선)이다. 변화한 회전 관성을 추정하며 약 4×10-6정도의 오차가 존재하는 결과를 확인할 수 있지만, 회전 관성의 크기가 작은 수준임을 감안하였을 때 비교적 합리적인 추정 결과로 분석할 수 있다. (g)에서 추정 잔차는 0에 수렴하는 것을 확인할 수 있다.
다음의 Fig. 6은 추정된 파라미터 변화량을 이용하여 도출된 성능 지수 평가 결과를 보여준다. 현 단계에서, 하나의 방정식에 여러 파라미터가 동시에 급격히 변화하는 결과 도출의 한계점을 확인하였다.
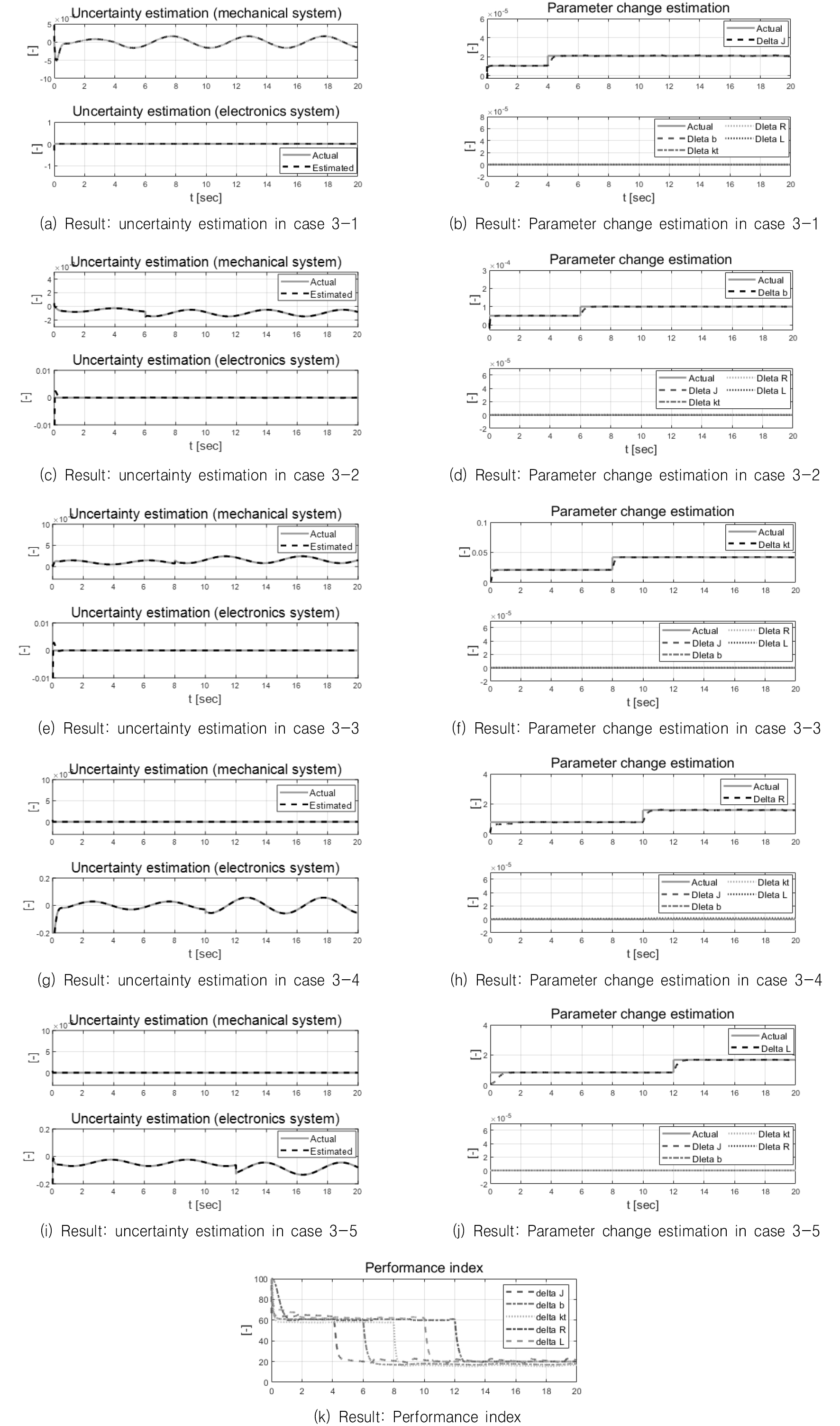
따라서, Fig. 6의 불확성 및 파라미터 추정 결과와 같이 개별 파라미터가 급격히 변화하는 결과에 대한 성능 지수를 각각 도출하였다. 불확실성 추정 결과인 Fig. 6의 (a), (c), (e), (g), (i)에서 회전 관성은 4초, 감쇠 계수는 6초, 토크 상수는 8초, 저항은 10초, 인덕턴스는 12초에 개별적으로 추가 변화하였음을 확인할 수 있다. 각 파라미터의 추가 변화에도 비교적 합리적으로 추정되는 결과를 보여준다. 각 파라미터는 정해진 시점에서 Table 3과 동일한 변화량이 추가되었으며, 파라미터 변화량 추정에서 약 1초의 지연 결과를 확인할 수 있다. 이때, (b)의 추정 오차는 약 4×10-10, (d)는 약 3×10-6, (f)는 약 3×10-5, (h)는 약 8×10-5, (j)는 약 0.0005이다. Fig. 6의 (k)는 이때의 파라미터 변화량에 따른 성능 지수 결과로, 개별 파라미터의 추가 변화에 따라 특정 시점에 성능 지수가 감소하는 결과를 확인할 수 있다.
4. 결 론
본 논문에서는 다중 RLS를 기반으로 모빌리티 회전체의 건전성을 모니터링하는 알고리즘을 제안한다. 다중 RLS는 설계된 회전체의 수학적 모델 기반으로 불확실성을 추정하는 단계와, 추정된 불확실성을 이용하여 파라미터 변화량을 추정하는 단계로 이루어져 있다. 각 RLS는 시변하는 파라미터의 특성을 반영하기 위하여 망각인자를 적용하여 평가하였다. 제안하는 알고리즘은 불확실성 및 파라미터 변화를 합리적으로 추정하였다. 추정된 회전체의 실시간 파라미터 변화량을 정량화하여 모니터링하기 위하여 추정된 파라미터 변화량을 이용하는 성능 지수를 설계하였다. 하지만. 적용된 망각인자의 경우 적응 알고리즘이 아닌 고정값이기 때문에 향후 망각인자의 적응형 갱신을 통한 알고리즘 고도화를 계획하고 있다. 또한, 여러 파라미터가 동시에 여러 번 변화하는 상황에서의 변화량 추정을 위한 알고리즘 고도화를 계획하고 있다. 본 논문에서 개발된 알고리즘의 고도화와 신뢰성 향상을 위해 운동 방정식과 전압 방정식의 파라미터를 정량적으로 변화시키고 계측할 수 있는 실 테스트 플랫폼을 이용한 성능 평가를 계획하고 있다.
