

1. 서 론
2. 전문 운전자 주행 데이터 수집
3. 운전자 주행 특성 모사를 위한 거동 계획
3.1. 가우시안 혼합 회귀를 이용한 기준 궤적 생성
3.2. KMP 기반 기준 궤적 모방
4. 목표 경로와 속도 계획 결과
5. 결 론
1. 서 론
한계 주행 상황에서의 차량 자세 제어를 위한 연구는 긴급 상황에서 차량의 안정성을 확보하고 사고 위험을 낮추기 위해 활발히 진행되어 왔다.(1) 트랙 한계 주행은 이와 마찬가지로 마찰 한계를 최대한 사용하는 차량의 거동 능력을 요구하지만 최소 시간 주행이라는 목적을 지니고 있다. 전문 운전자의 역할을 대신하여 트랙 한계 주행을 수행하는 자율주행 시스템에 대한 연구는 폭넓은 연구 분야로서 많은 연구자들에 의해 진행되고 있다.(2) 일반 자율 주행 시스템과 유사하게 트랙 한계 자율주행 시스템은 인지, 측위, 거동 계획, 제어의 4가지 단계로 나눌 수 있다. 인지와 측위 단계에서는 차량의 트랙 내 위치를 파악하고 주변의 장애물들을 확인하여 주행 가능한 영역을 판단한다. 그 다음 거동 계획 단계에서는 차량이 주행할 선정의 경로와 목표 속도를 결정하는데, 대표적으로 트랙의 기하적 형상에 따라 경로와 속도를 계획하는 방법과 차량 모델에 기반한 최소 시간 거동 최적화 결과를 바탕으로 거동을 계획하는 방법이 있다.(3)
기하적 접근 방법은 주행하는 차량의 동역학적 특성에 대한 고려 없이 레이싱 라인의 곡률 및 이동 거리에 기반한 목적 함수를 정의하고 이를 최소화하는 라인을 찾는다. A. Heilmeier는 최소 곡률 경로와 최소 거리 경로를 비교하였는데, 최소 곡률 경로와 이를 기반으로 한 속도 계획은 시간 최적화를 통해 얻은 해와 유사한 결과를 보이는 반면 최소 거리 경로는 현저히 다른 레이싱 라인과 느린 랩 타임을 보였다.(4) 한편 곡률과 이동 거리의 합을 동시에 고려하는 목적 함수를 정의하고 이를 최적화하는 레이싱 라인을 도출하는 연구도 진행된 바 있다.(5) 시간 최적화 기반 거동 계획은 차량의 동역학적 모델과 트랙의 내, 외측 경계를 구속 조건으로 정의하고 출발 지점부터 종료 지점까지 소요되는 시간을 최소화하는 제어 입력과 이에 따른 차량의 경로 및 속도를 도출한다.(6) 이 방법은 앞서 언급한 곡률 최소화 경로에 비해 더 빠른 랩 타임을 기록할 수 있는 거동을 계산하지만, 복잡한 차량 동역학 모델을 구성해야 하고 정확한 결과를 얻기 위해 대상 차량의 파라미터를 면밀히 알아야 한다는 단점들이 존재한다.
하지만 많은 전문 운전자들은 근소한 차이를 보이는 랩 타임을 기록하지만 상이한 레이싱 라인과 속도 프로파일을 보인다는 것이 알려져 있다.(7) 최적화에 기반한 목표 거동을 추종하는 트랙 자율 주행 차량은 주어진 차량 동역학적 한계와 도로 형상에 따른 기하적 한계 내에서 단일 해집합으로 표현되는 경로와 속도 계획을 수립한다. 따라서 빠른 랩 타임을 기록함과 동시에 특정 운전자의 성향을 모방하는 것은 기존의 방법과 다른 접근이 필요하며, 본 연구에서는 운전자의 레이싱 라인과 속도 프로파일의 분포를 기반으로 한 목표 거동을 계획하는 알고리즘을 제시한다.
본문의 2장에서는 수집한 전문 운전자의 트랙 주행 데이터와 그 방법에 대해 소개한다. 3장에서는 가우시안 혼합 모델과 가우시안 혼합 회귀를 이용한 목표 궤적 도출과 kernelized movement primitives(KMP)에 기반한 분포 모델링에 대해 서술한다. 마지막으로 4, 5장에는 각각 제안된 거동 계획 알고리즘의 결과와 결론에 대해 기술한다.
2. 전문 운전자 주행 데이터 수집
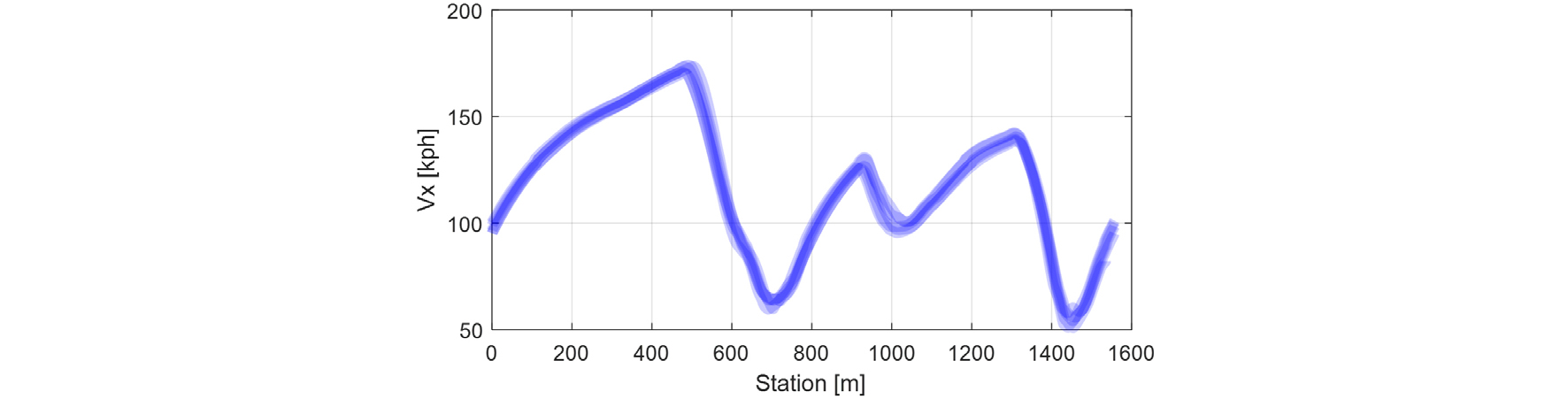
전문 운전자의 주행 데이터를 수집하기 위해 실험 차량에는 INS 장치가 내장된 DGPS 장비를 장착하였다. 차량의 절대 위치, 속도, 가속도 값은 10 ms 주기로 산업용 PC를 통해 기록하였으며 실험 차량의 구성은 Fig. 1과 같다. 같은 트랙에서 동일한 운전자가 주행한 총 4바퀴의 주행 데이터를 취득하였고, 전체 구간 중 비교적 큰 횡 방향 편차를 보인 두 헤어핀 구간에서의 누적된 경로는 Fig. 2에 도시하였다. 트랙 중심선을 따라 이동한 거리에 대한 속도를 나타낸 그래프는 Fig. 3과 같다. 코너에서의 거동을 살펴보면 트랙의 내측 경계에 가장 가까이 최대 곡률로 주행하는 지점인 apex에서는(8) 작은 편차로 정밀하게 해당 지점을 통과하지만, 진입과 진출 구간에서 비교적 큰 편차를 보인다는 것을 알 수 있다.


3. 운전자 주행 특성 모사를 위한 거동 계획
3.1. 가우시안 혼합 회귀를 이용한 기준 궤적 생성
2장에서 소개한 방법으로 취득한 운전자 주행 데이터는 입력과 출력에 해당하는 변수들의 순서쌍 집합으로 나타낼 수 있는데, 그 형태는 식 (1)과 같다.
N, D는 각각 데이터 점의 수와 취득한 랩의 수를 의미하며, scenter는 트랙 중심선 상 이동 거리이다. xG와 yG는 GPS 절대 좌표 값을 나타내며 vx는 차량의 종 방향 속도이다. 따라서 운전자의 누적된 주행 데이터를 통해 중심선 상 이동 거리에 따른 위치와 속도의 사전 확률 분포를 가우시안 혼합 모델에 기반하여 식 (2)와 같이 생성할 수 있다.(9)
C는 혼합 모델에 사용되는 가우시안 분포의 개수를 의미한다. 입력 변수가 주어졌을 때 출력 변수의 사후 확률 분포는 가우시안 혼합 회귀를 이용해 식 (3)과 같이 얻을 수 있다.(10)
이렇게 얻어진 출력 변수들의 집합인 은 기준 궤적으로 정의되며, KMP 기반 궤적 분포의 모방 대상이 된다.
3.2. KMP 기반 기준 궤적 모방
3.1절에서 구한 기준 궤적은 취득한 주행 경로와 속도 정보를 포함한 데이터 점들의 집합인데, 해당 지점들을 포함한 트랙 내 임의의 지점에서의 목표 거동을 도출하기 위해서는 보간과 보외를 적용하기 용이한 형태의 거동 확률 분포가 필요하다. KMP 기반 매개화 궤적은 이러한 특성을 만족시킴과 동시에 적은 수의 파라미터로 모델링이 가능하다.(11) 매개화 궤적은 식 (4)와 같이 기저 함수 행렬과 무게 벡터의 곱으로 나타낼 수 있는데, 무게 벡터는 식 (5)의 분포로 초기화되었다고 가정한다.
이 때 매개화 궤적은 무게 벡터의 분포에 기반하여 다음과 같은 정규 분포를 갖는다.
매개화 궤적 분포의 궁국적인 목표는 식 (3)의 기준 궤적 분포를 모방하는 것이다. 이를 위해 다음과 같이 두 확률 분포의 유사도를 나타내는 척도인 Kullback-Leibler divergence를 도입하였다. KL divergence 값이 작을수록 두 분포는 유사한 분포를 보이기 때문에 기준 궤적 모방 문제는 식 (7)의 목적 함수를 최소화하는 최적화 문제로 정의할 수 있다.
최적화 문제의 변수는 식 (5)의 평균과 공분산 값들로, 최적 지점에서 각각 다음과 같은 값을 갖는다는 것이 알려져 있다.(11)
여기서 λm, λc는 각각 평균과 공분산의 과적합을 방지하기 위한 regularization 항의 계수를 의미한다. 이 최적 값들을 이용하면 임의의 입력 변수에 대한 매개화 궤적 출력 변수의 평균과 공분산을 얻을 수 있다. 먼저, 식 (4)에 사용한 기저 함수의 내적 곱을 식 (10)과 같은 커널 함수로 정의한다.
사용한 커널은 radial basis function (RBF) 커널로, 서로 가까운 상태 공간에 위치한 벡터에 대해 큰 함수 값을 부여하는 경향을 보인다. 이렇게 정의한 커널 함수를 바탕으로 임의의 시험 입력 값 s*에서의 출력 변수의 평균과 공분산은 각각 식 (11), (12)와 같이 표현된다.
커널 함수를 이용하면 식 (8), (9)에서 나타난 기저 함수 행렬의 곱 및 역행렬을 구하는 과정이 보다 낮은 차원의 커널 행렬 연산으로 대체 가능하다는 이점을 얻을 수 있고, 명시적으로 기저 함수를 정의하지 않더라도 커널 함수의 특성과 종류를 변경하여 회귀 모델의 성능을 향상시킬 수 있다.
기준 궤적 및 매개화 궤적 생성 단계에서 사용한 파라미터와 그 값들은 Table 1에 정리하였다.
4. 목표 경로와 속도 계획 결과
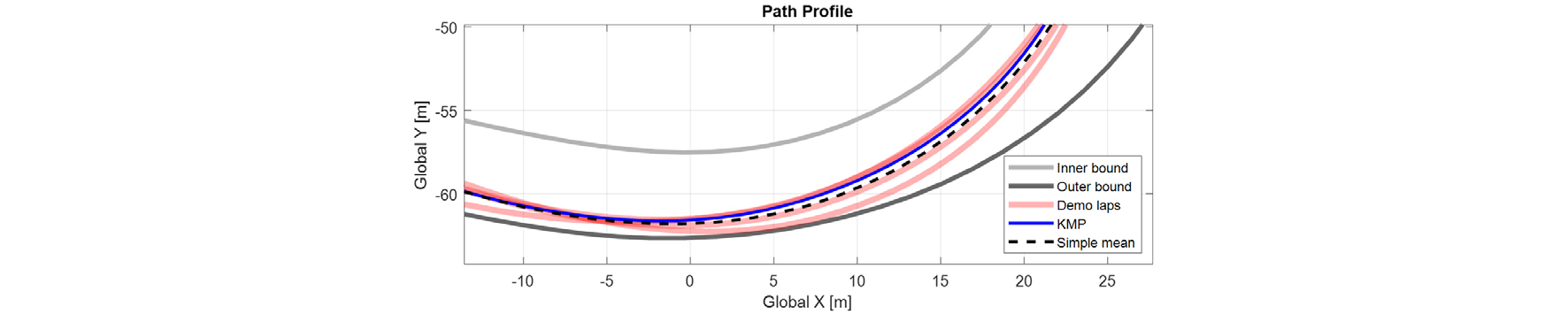
주행 데이터를 기반으로 생성한 기준 궤적 분포를 바탕으로 매개화 궤적을 학습하면 트랙 중심선 상의 이동 거리에 따른 목표 위치와 속도를 산출할 수 있다. 본 연구에서는 트랙 한 바퀴의 시작과 끝 지점을 등간격으로 나눈 지점들을 정의하고, 이 곳에서의 출력 변수의 절대 좌표 값과 속도 값의 평균을 각각 누적하여 레이싱 라인과 속도 프로파일로 생성하였다. KMP 기반 레이싱 라인 및 1 표준편차 경계에 해당하는 공분산 타원은 Fig. 4에 도시하였고, 누적 시범 주행 궤적은 반투명한 붉은색 선으로 표기하였다. 위치에 대한 공분산 행렬을 바탕으로 공분산 타원을 도시하는 과정에서 직교 좌표계에서의 타원 장축 길이(L1)와 단축 길이(L2), 장축 회전 각 (ϕ)을 구하는 방법은 식 (13)을 따라 적용하였다.

2장에서 언급한 두 헤어핀 구간의 경우 횡 방향 편차가 큰 지점인 코너 진 출입 구간과 정밀한 위치 정확도를 보이는 apex 지점이 혼재하는데, Fig. 4에 도시한 해당 구간에서의 공분산 타원과 목표 경로를 보면 이러한 특성을 반영한 모방 궤적이 도출되었음을 알 수 있다.
중심선 기준 이동 거리에 따른 속도 프로파일의 평균과 분산은 Fig. 5에 도시하였다. 속도 분포의 경우 전체 출력 변수의 공분산 행렬 중 단일 변수에 대한 분산을 고려하기 때문에 공분산 타원 대신 오차 막대의 형태로 1 표준편차 영역을 표기하였다. 시범 주행에서의 누적 속도 프로파일은 반투명 청색 그래프로 도시하였으며, KMP 예측 평균값은 진한 청색 실선으로 표기하였다. 속도 프로파일의 편차는 가속과 감속 구간에서 크게 발생함을 알 수 있었고, 이러한 특성 역시 KMP를 기반으로 생성된 궤적에서 모방되었음을 확인할 수 있다.

제시된 KMP 기반 경로는 식 (14)로 계산된 이동 거리에 대한 시범 주행 궤적 좌표의 산술 평균으로 계산된 경로와 비교하였다.
두 방법 모두 연속적인 곡률을 갖는 경로가 생성됨을 정성적으로 확인할 수 있었지만, 산술 평균으로 계산된 경로는 KMP 기반 방법에 비해 outlier에 민감한 경향이 있음을 확인하였다. 이는 Fig. 6에 도시한 2번 헤어핀 코너에서 산술 평균 기반 경로가 KMP 기반 경로에 비해 외측으로 편향되어 있는 예시를 통해 확인할 수 있었다. 계측된 시범 궤적들 중 나머지 경로들에 비해 바깥쪽으로 주행한 데이터가 존재하는데, KMP에서는 가우시안 커널에 기반한 분포 모델링을 이용하여 예외 사항을 효과적으로 수행할 수 있었다. 반면 단순 평균을 이용하게 되면 모든 주행 궤적이 동일한 가중치로 작용하기 때문에 outlier가 존재하는 분포에 대하여 비교적 강건하지 못하다는 단점이 있음을 확인할 수 있다.
5. 결 론
본 논문에서는 전문 운전자의 누적된 시범 주행을 바탕으로 트랙 한계 자율 주행 차량의 거동을 계획하는 알고리즘에 대해 소개하였다. 제시된 거동 계획 알고리즘은 가우시안 혼합 모델 및 가우시안 혼합 회귀 기반 기준 궤적 생성과 KMP를 이용한 매개화 궤적의 분포 학습으로 이루어진다. 가우시안 커널과 시범 주행 데이터 점의 통계적 특성을 기반으로 KMP는 임의의 입력 변수에 따른 출력 변수의 평균과 공분산을 도출한다. 매개화 궤적의 중심선 상 기준 이동 거리에 대한 출력 변수의 평균값으로서 얻어진 목표 경로와 속도 프로파일은 운전자의 성향과 거동 편차에 대한 확률적 정보를 담고 있음이 확인되었고, 부드럽고 연속적인 형태를 지니기에 트랙 자율주행 차량의 목표 거동으로 삼기에 적절함을 알 수 있었다. 추후 연구로는 기하학적 구속 조건을 추가한 실시간 계획을 통해 기존 경로를 변경하여 경쟁 차량에 대한 회피 및 추월 거동을 수행하는 것을 목표로 한다.
