

1. 서 론
2. 관련 연구
3. 자율주행 교통약자 서비스 및 HMI 개발 개요
4. 교통약자 서비스 제공을 위한 급회전 검출 알고리즘
4.1. 차량 위치 A2_Link 검출 알고리즘
4.2. 곡률반경 계산 알고리즘
4.3. 급회전 검출 시스템
5. 시험결과
5.1. Radius Of Curvature 정확도 시험
5.2. 필드 테스트
5.3. 필드 테스트 결과
6. 결 론
1. 서 론
자율주행 기술의 발전은 교통 안전성의 확대, 여가 시간의 증가, 차량 공유로 인한 차량 대수 감소 등을 통해 교통분야에서의 여러 가지 혁신적인 변화를 가져올 것으로 예상되고 있으며,(1) 특히 교통약자를 위한 이동 편의성 향상에 큰 기여를 할 것으로 기대되고 있다. 교통약자는 고령자, 장애인, 임산부, 어린이 등을 포함하고 있으며, 이들은 이동 과정에서 다양한 어려움과 불편을 겪고 있다. 이러한 교통약자에게 자율주행 자동차는 안전하고 편리한 이동 수단을 제공할 수 있을 것으로 평가받고 있다.
현재 자율주행 자동차의 상용화는 초기 단계에 있다. 국내에서는 여러 기업과 지자체에서 자율주행 기반의 유상 운송 서비스를 시작하였지만 안전성과 경제성을 이유로 서비스가 중단된 사례가 있다.(2) 국외에서는 자율주행 자동차로 인한 인명사고가 발생하는 등 자율주행 기술과 서비스에 대한 불신이 존재하고 있으며, 이로 인해 사회적 수용성의 한계에 부딪힌 상태이다.(3) 한편, 자율주행 기술의 안전성이 향상되더라도 사회적 수용성을 확대하는 문제는 또 다른 이슈로 남아있고, 이를 극복하기 위해서는 인간-기계 인터페이스(HMI: Human-Machine Interface)를 통해 자율주행차의 기술과 서비스를 효과적으로 표출하여 자율주행차에 대한 신뢰성 향상을 통해 수용성도 점차 높여나갈 수 있을 것으로 생각된다.
자율주행 자동차의 HMI는 탑승객과 자율주행차와 상호작용하는 방법을 정의하며, 이는 차량의 사용성, 안전성, 신뢰성에 직접적인 영향을 미친다.(4) 특히, 교통약자를 위한 HMI는 사용자 친화적이어야 하며, 직관적인 조작과 명확한 피드백 제공을 통해 탑승자의 안전을 도모할 수 있어야 한다. 이를 위해서는 교통약자의 특성에 따른 신체적, 인지적 제한을 고려한 인터페이스와 추가의 정보 제공을 통해 수용성을 향상하고 탑승객의 안전을 도모할 필요가 있다.(5)
본 논문에서는 자율주행차량의 거동 정보를 HMI를 통해 탑승객에 미리 제공함으로써 자율주행자동차를 이용하는 교통약자의 안전을 도모하는 급회전 검출 시스템에 대한 연구를 수행한다. 이를 통해, 교통약자를 위한 자율주행차의 실용성을 높이고, 보다 포용적인 교통 시스템 구축에 기여하고자 한다. 또, 자율주행 기술의 혜택을 모든 사용자에게 공평하게 제공되길 바라며, 교통약자의 이동 자유와 삶의 질 향상에 중요한 역할을 할 것으로 기대한다.
2. 관련 연구
자율주행 자동차에서 HMI는 자율주행 시스템의 한 분야로 인식되고 있고, HMI의 역할과 요구사항에 대한 정의 및 이에 대한 실증 관련 연구가 국내외적으로 다양하게 진행되고 있다.
자율주행 자동차에서 HMI의 역할에 대하여 (6)에서는 운전자와 ADS(Autonomous Driving System)가 교통상황에 관한 정보를 공유하는 것을 제시하였고 HMI가 역할을 수행하는데 따라오는 기술적 어려움을 극복하기 위한 HMI 설계, 구현, 검증 방법을 제시하였다. 또, (7)에서는 자율주행차에서의 위험요인과 자율주행차를 위한 HMI 핵심 기술요소, 인터페이스의 변화, 산업 및 시장 동향, 정책 동향을 분석하였고, 자율주행차의 상용화를 위하여 HMI를 통해 안전불안감을 해소하고 수용성 향상이 필수적으로 수행되어야 할 것으로 결론을 제시하였다.
이러한 자율주행 자동차 HMI에 필요한 요구사항에 대하여 (8)에서는 HMI 역할의 범위가 확장되고 있으며 양방향 상호작용기술로 나아가려는 추세로 분석하였으며, 이를 위해 필요한 HMI의 기능을 크게 운전자모니터링 기술, 제어권 전환 기술, 입출력 기술로 구분하였다. 또, (4)에서는 HMI의 공급이 사용자 요구사항을 따라가지 못하고 있음을 언급하며 사용자가 신뢰할 수 있는 HMI를 위한 요구사항으로 정보의 직관성, 적절한 피드백, 정보의 적절성을 제시하였다. (9)에서는 안전하고 신뢰할 수 있는 서비스를 위하여 외부와의 상호작용을 강화하는 HMI를 제안하였고, 이는 차량 내외부의 디스플레이와 지향성 스피커를 활용하여 도로 이용자, 외부 차량 및 탑승객에게 상황 정보를 제공할 수 있음을 제시하였다.
HMI 연구에 대한 실증으로 (10)에서는 차량의 제어 및 주행상황 파악을 위한 HMI의 특징을 분석하여 제조사별로 차별적 특징들이 있음을 확인하였고, 향후 군집주행, 자율주행차량에서의 HMI 변화와 서비스 컨텐츠에 대한 연구 필요성을 제시하였다. (11)에서는 주행 중인 차량의 자율주행 단계 정보를 HMI 화면에 표기하는 다양한 방법이 가능함을 제시하였으며, 실험을 통해 적절하게 표기된 정보는 사용자의 혼동을 줄이는 데 효과가 있음을 확인하였다. 또한, 사용자가 자율주행 차량의 자율주행 단계를 정확하게 인지할 경우, 부주의로 인한 사고를 예방할 수 있음을 제시하였다. 한편, (12)에서는 사용자가 가상 현실 기반 운전 시뮬레이션에 몰입하는 동안 생리적 신호로부터 수집된 지속적이고 객관적인 정보를 기반으로 AV(Autonomous Vehicle)에서의 사용자 경험을 검증하는 방법론을 제안하였다. 이를 이용하여 HMI가 많은 정보를 제공할수록 사용자의 인지 부하가 높아짐에도 불구하고 주행 스트레스가 낮아지는 실험결과 데이터를 얻었고, HMI에서 제공하는 정보의 종류를 지시(HOW)정보보다 이유(WHY) 정보를 제공하는 것이 신뢰도 향상에 도움이 되는 것으로 나타났다. 또, (13)에서는 47명의 버스 운전자를 대상으로 세 가지 버전의 HMI 테스트를 수행하고 그 결과를 제시하였다. 단순 경고 메시지는 운전자에게 부정적인 반응을 얻었고, 위험 인자의 위치 및 방향 정보가 포함된 경고 메시지가 운전자의 모니터링 횟수를 줄이는데 가장 획기적인 것으로 나타났다.
국내에서는 2027년에 사람이 전혀 작동에 개입하지 않는 완전 자율주행 자동차인 레벨4 이상 자율주행 자동차 상용화를 목표로 2021년부터 범부처 차원에서의 「자율주행 기술개발 혁신사업(KADIF)」을 수행하고 있고, 이를 위해 자율주행 인프라, 생태계, 서비스로 구분하여 다양한 자율주행 지원 시스템과 서비스를 개발하고 있다. 이중 “교통약자(장애인, 노약자, 교통소외지역 등) 이동지원 모빌리티 서비스 기술 개발 과제(이하, 자율주행 교통약자 과제)”에서는 교통약자를 위한 자율주행기술과 서비스를 개발하고 있으며 Lv4+ 수준의 자율주행기술을 적용한 교통약자 이동지원 모빌리티 서비스를 개발하여 자율주행 기반 모빌리티 서비스의 원천기술개발과 상용화 및 기술확산 기반 마련을 목표로 장애인, 노약자를 비롯한 대중교통의 이용이 상대적으로 어려운 교통소외지역 주민을 포함하여 서비스를 제공할 예정이다.
3. 자율주행 교통약자 서비스 및 HMI 개발 개요
자율주행 교통약자 과제는 2021년도부터 시작하여 현재 2단계 연구개발을 진행하고 있다. 특히, “교통약자 특화형 자율주행차량 플랫폼”, “인프라 기반 자율주행 상황정보 공유 및 연계기술”, “AI 기반 경로탐색 및 배차 기술”, “교통약자 친화형 서비스 시스템 개발 기술”에 대한 연구개발을 진행하고 있고, 3단계 2026년부터 서비스의 실증을 위하여 총 10대의 자율주행 차량이 리빙랩으로 선정된 화성시에서 서비스될 예정이다. 이를 통해, 특별교통수단 부족 문제 해결, 쾌적하고 편리한 이동 여건 조성, 교통약자 자립생활 기반 마련, 교통소외지역 거주자 맞춤형 모빌리티 서비스 제공, 대중교통 서비스 확충 및 지속 공급, 이동권 사각지대 문제 해결을 기대하고 있다.
자율주행 교통약자 서비스 제공을 위해서는 자율주행차량 시스템, 예약/승하차 서비스, 경로탐색/ 배차 시스템, 관제 시스템, V2X 통신시스템, HMI 등 다양한 요소장치를 연계하여 서비스를 제공하고, 특히 HMI는 자율주행차량 내 전면 시트 중앙에 설치되어 서비스를 이용하는 탑승객과 차량 및 서비스 시스템 간의 상호작용을 지원하는 장치로 이용될 예정이다.
자율주행 교통약자 과제에서는 편리한 모빌리티 서비스와 함께 교통약자의 안전을 최우선 사항으로 두고 시스템을 개발하고 있다. 이를 위하여 HMI는 자율주행차량의 주행상태 정보를 확인할 수 있도록 하여 탑승객의 안전을 도모하고 모빌리티 서비스의 상태를 확인할 수 있는 역할을 담당할 예정이다. Table 1은 자율주행 교통약자 HMI 시스템의 사양을 나타낸 것으로, 이를 통해 교통약자가 자율주행 차량의 상태와 서비스를 직관적으로 확인할 수 있도록 지원한다. 특히, 급회전, 과속방지턱 등으로 인하여 갑작스러운 차량 거동에 따른 흔들림을 탑승객이 대비할 수 있도록 해당 정보를 사전에 제공함으로써 현재 자율주행기술의 안전성에 대한 의구심 때문에 낮은 수용성 문제를 극복하고자 한다.
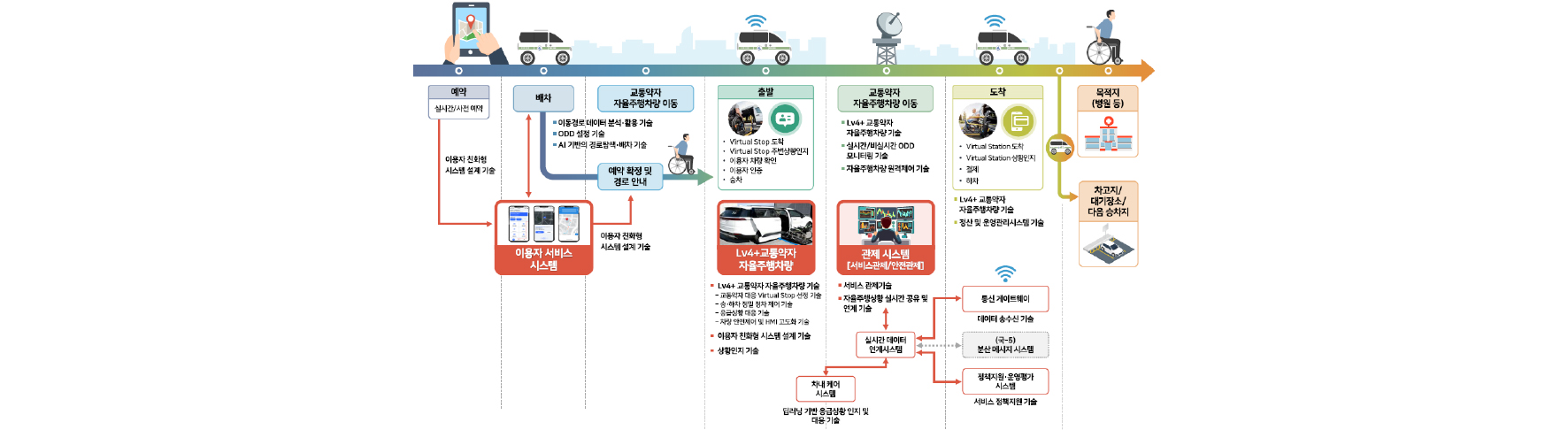

Table 1.
Design specification
4. 교통약자 서비스 제공을 위한 급회전 검출 알고리즘
이번 장에서는 운행 중인 자율주행차량의 이동속도에 따른 전방 급회전 구간 정보를 사전에 교통약자에게 제공하기 위하여 Fig. 3과 같이 급회전 경고 알림 시스템을 제안한다. 이러한 시스템은 특히 교통 약자에게 자율주행차량뿐만 아니라 일반 차량의 탑승중 안전성을 높이는데 기여할 수 있을 것으로 생각된다.
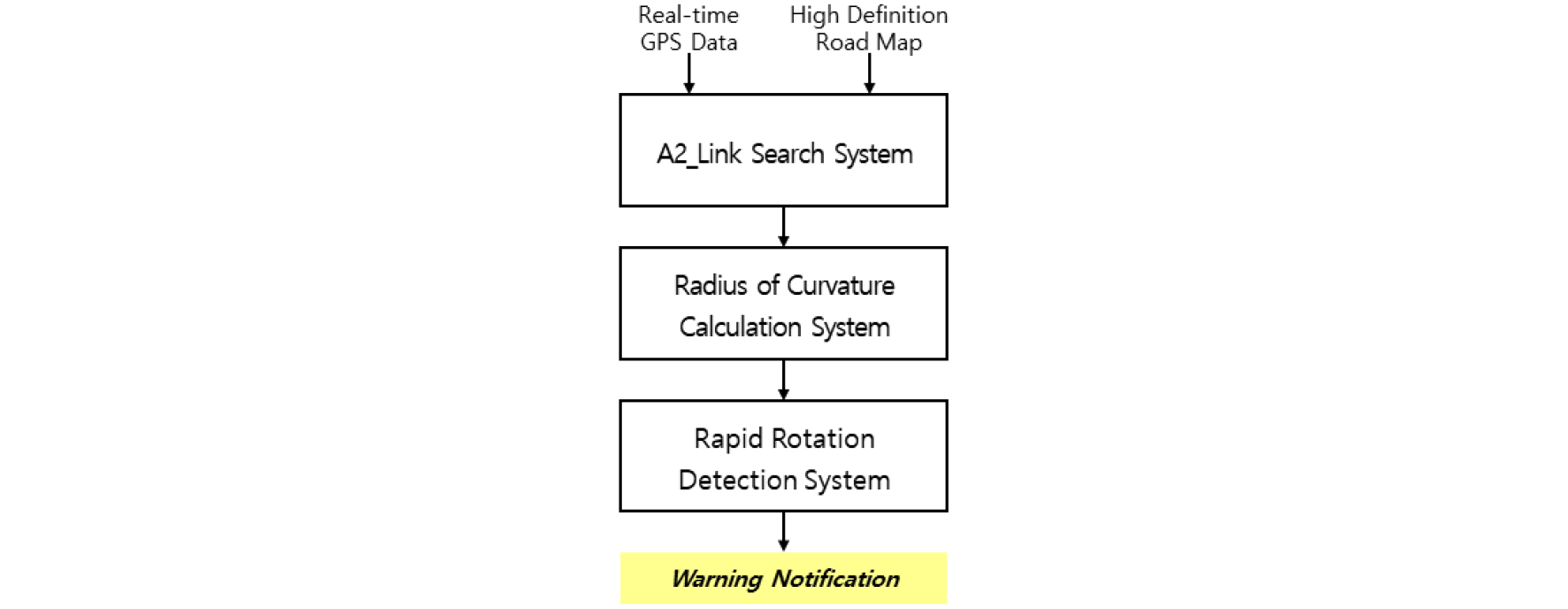
급회전 검출에는 실시간 차량 주행정보와 목적지까지의 주행 경로가 포함된 정밀도로지도 데이터가 필요하다. 차량 주행정보는 위도, 경도, 헤딩, 속도 정보 등 GPS 센서로 획득할 수 있고, 정밀도로지도 데이터는 실시간 입력이 요구되지 않는 정적데이터이므로 사전에 저장하여 사용한다.
전방 급회전 검출은 차량의 실시간 위치정보와 정밀지도를 입력으로 하여 전방 도로의 Link 정보를 획득한 뒤 곡률반경(Radius of Curvature)을 계산하고, 곡률반경과 차량의 속도를 이용하여 급회전 여부를 결정하는 과정으로 수행된다.
4.1. 차량 위치 A2_Link 검출 알고리즘
정밀도로지도는 자차위치 결정, 경로 설정·변경, 도로·교통 규제(차선, 정지선, 표지정보 등)등의 인지를 위한 자율주행 기본 인프라로 도로 네트워크 정보를 노드와 링크로 표현하고 있다. 그래서 정밀 측위를 통해 획득된 차량의 위치 데이터로 현재 주행하는 Link를 찾을 수 있다면 정밀도로지도에서 제공하는 다양한 도로정보를 활용할 수 있다.
정밀도로지도에서는 도로의 형태를 정밀하게 표현하기 위하여 도로 내 객체를 조밀한 점군 형태로 나타낸다. 이 때문에 차량의 현재 위치에 대한 Link 데이터를 구하기 위하여 모든 Link 객체의 좌표 포인트에 대해 연산을 수행할 경우 정밀도로지도의 크기에 따라 데이터 처리 시간이 많이 소요되는 문제가 발생할 수 있다. 따라서 실시간으로 급회전 정보를 제공하기 위해 2단계의 탐색 알고리즘을 통해 링크 데이터를 검출하도록 하였다.
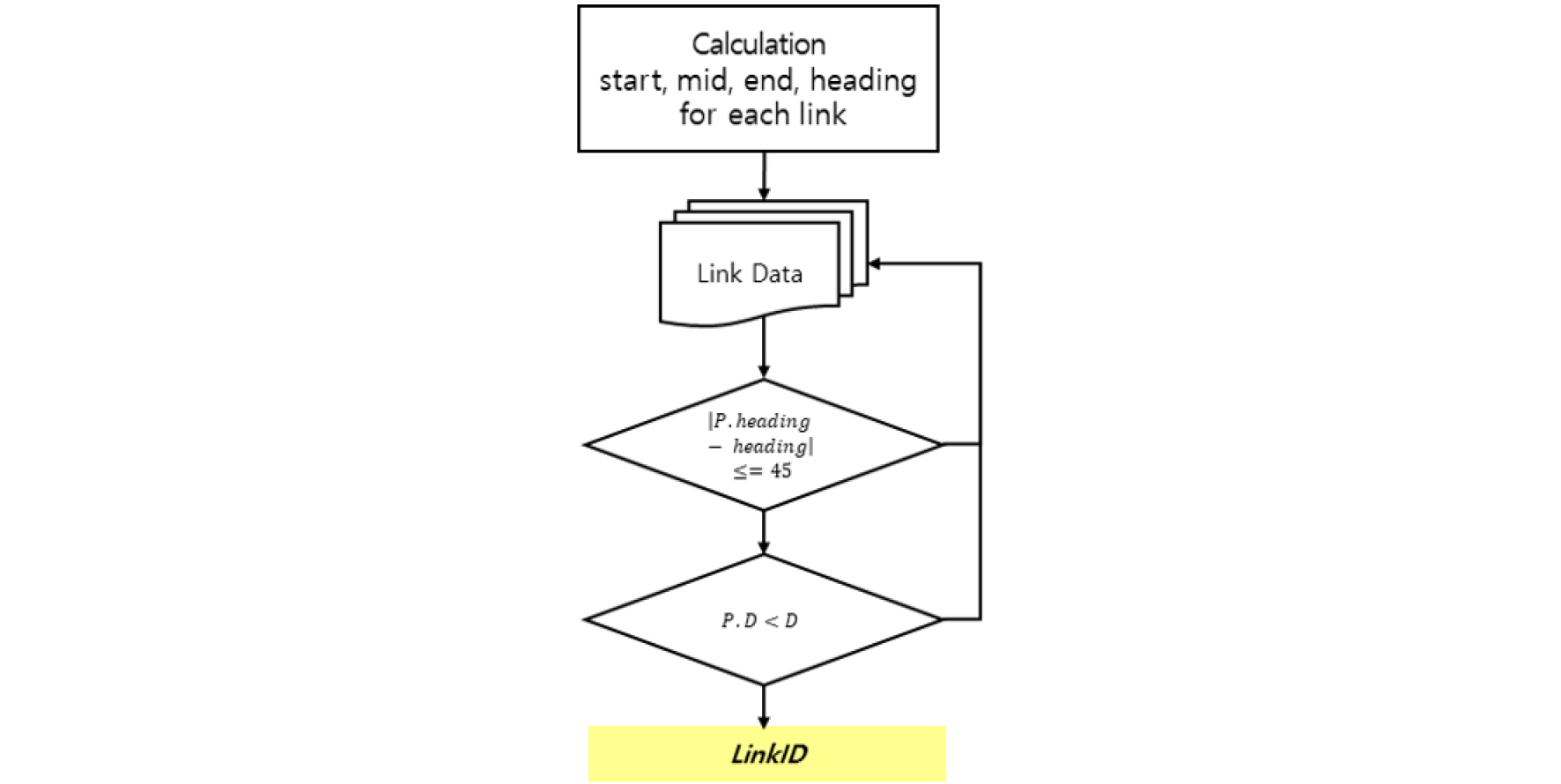
1단계는 전체 정밀도로지도에서 현재 위치와 가장 가까운 Link를 찾기 전 후보 Link를 획득하는 단계로, 흐름도는 Fig. 4와 같다. 먼저 정밀도로지도의 Link 데이터 리스트를 취득하고 개별 Link에 대해 시작, 중심, 끝점 정보를 이용하여 진행방향을 계산하여 저장한다. 그다음, 차량의 현재 진행 방향과 도로의 진행방향이 ±45도 각도 내에 있는 Link를 선별하고, 선별된 Link의 시작, 중심, 끝점과 현재 위치와의 거리를 계산하여 가장 가까운 위치의 Link 정보를 임시로 획득한다.
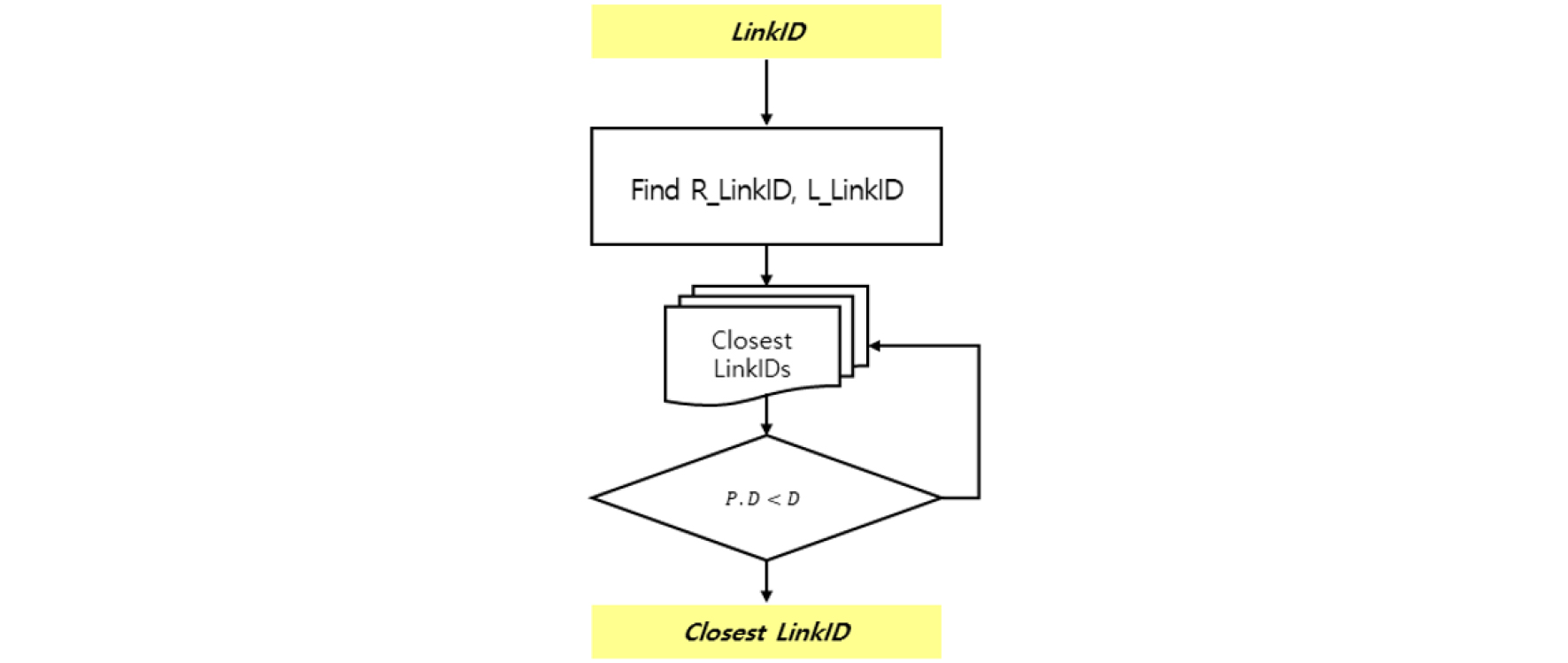
1단계에서 획득한 Link 데이터는 시작, 중심, 끝점으로만 수행된 결과이기 때문에 실제 차량의 현재 위치의 Link를 특정하기 위해서는 Link 데이터 내의 모든 점에 대한 거리 비교연산이 필요하며, 2단계 탐색 알고리즘의 흐름도는 Fig. 5와 같다. 1단계에서 탐색된 가장 가까운 Link의 오른쪽 차선(R_LinkID), 왼쪽 차선(L-LinkID)의 Link를 모두 탐색하여 진행 방향 도로의 모든 차선의 Link를 획득한다. 그다음, 탐색된 Link들의 모든 점과 현재 위치를 비교하여 가장 가까운 점을 탐색하여 가장 가까운 점을 가진 Link 데이터를 최종 검출할 수 있다.
4.2. 곡률반경 계산 알고리즘
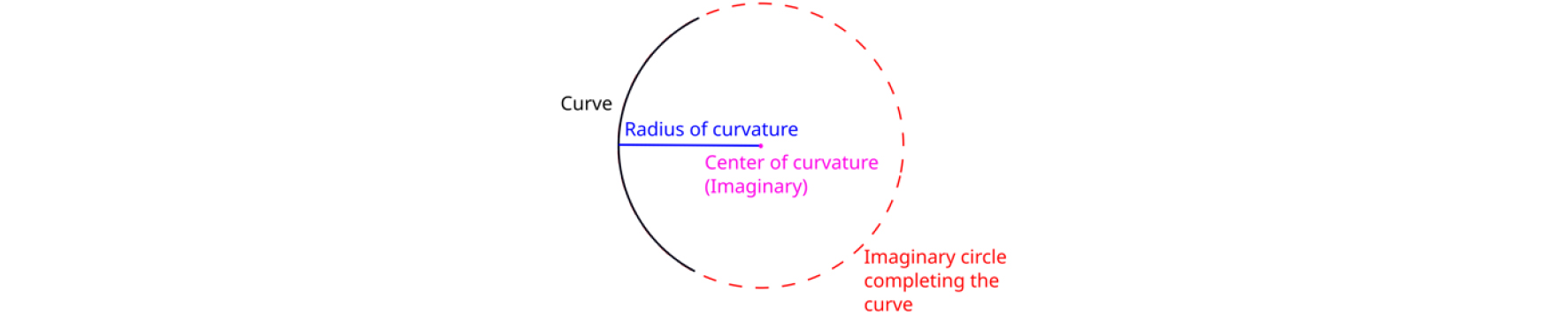
곡률반경(Radius of Curvature)은 곡률(Curvature)의 역수로, Fig. 6과 같이 이동 궤적 곡선에 가장 근접한 원호의 반지름을 의미한다. 곡률반경은 차량의 이동 경로를 추정하거나 도로의 임의의 지점에 대한 급회전 정보를 판단하는 주요 지표로 사용되고, 이 값이 작을수록 더 급격하게 회전하거나 방향을 바꾸는 것을 의미한다.
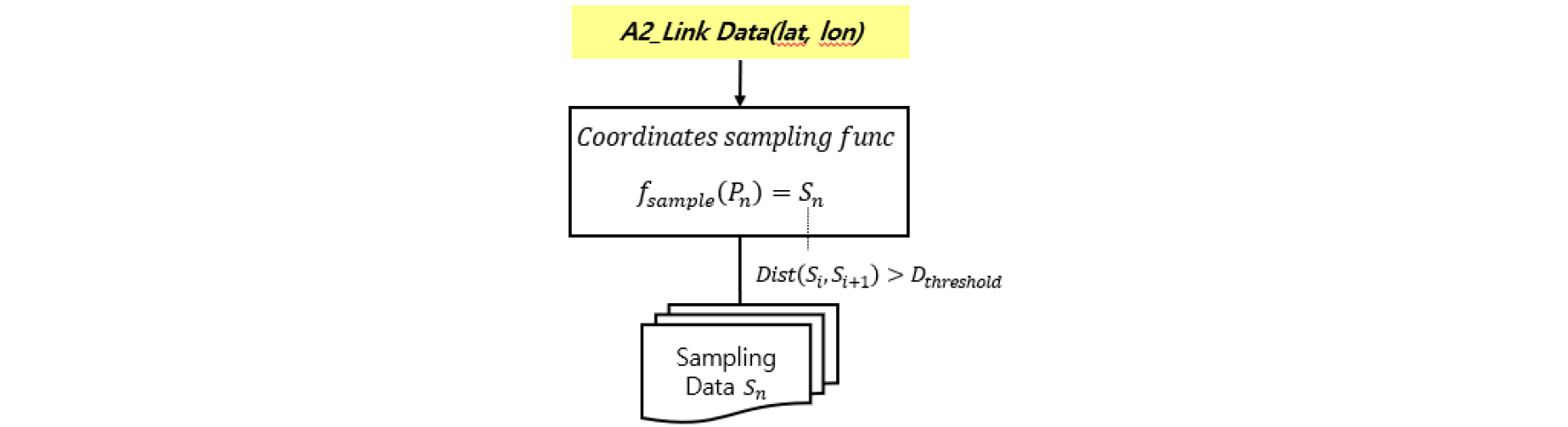
곡률반경을 계산하기 위해서는 이동 경로에 대한 좌표 데이터가 필요하며, 4.1절에서 검출한 차량 전방 주행경로에 대한 정밀도로지도 Link의 위경도 데이터 을 좌표 데이터로 사용한다. Fig. 7과 같이 시스템 내 좌표 데이터 샘플링 로직을 통해 좌표 간 거리가 이 되도록 샘플링 데이터 을 얻을 수 있고, 이를 노이즈 감쇄 필터에 적용하여 곡률 계산 오차를 효과적으로 줄일 수 있다.
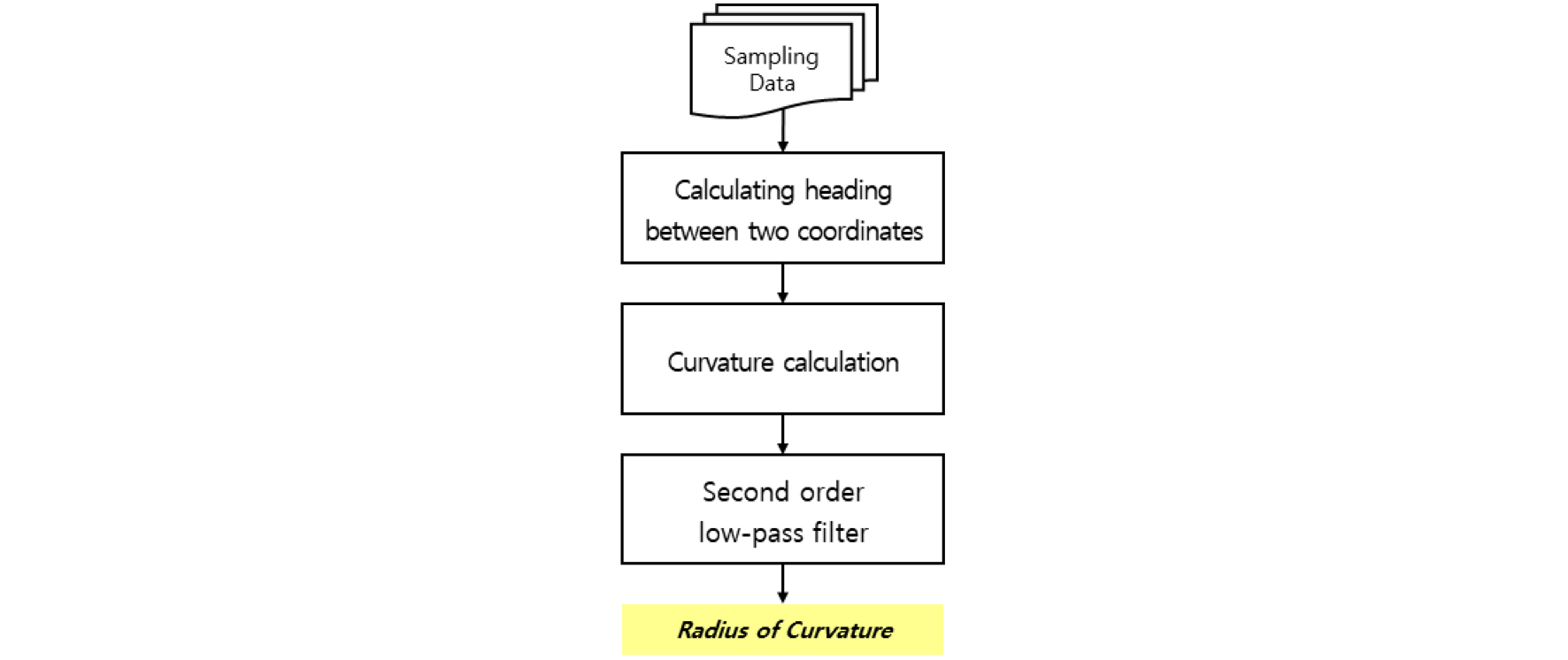
샘플링 데이터를 입력으로 하여 전방 도로에 대한 곡률반경 계산 과정은 Fig. 8과 같다. 전방 Link 내 샘플링 데이터 의 좌표 간 방향과 거리 계산을 통해 두 지점 간 곡률을 계산하고, 각 지점에서 계산된 곡률의 노이즈 제거 과정을 통해 최종적으로 해당 Link의 곡률반경을 구할 수 있다.
SAE-J2945 표준에서는 요레이트와 차량속도를 이용한 곡률반경 계산 수식을 제안하나,(14) 정밀도로지도의 링크 데이터에는 요레이트와 속도 정보가 없으므로 일정 거리로 샘플링된 데이터를 활용하여 헤딩변화량과 거리변화량을 구해 곡률을 구하는 방식을 사용하였으며 수식 (2)와 같이 계산할 수 있다.
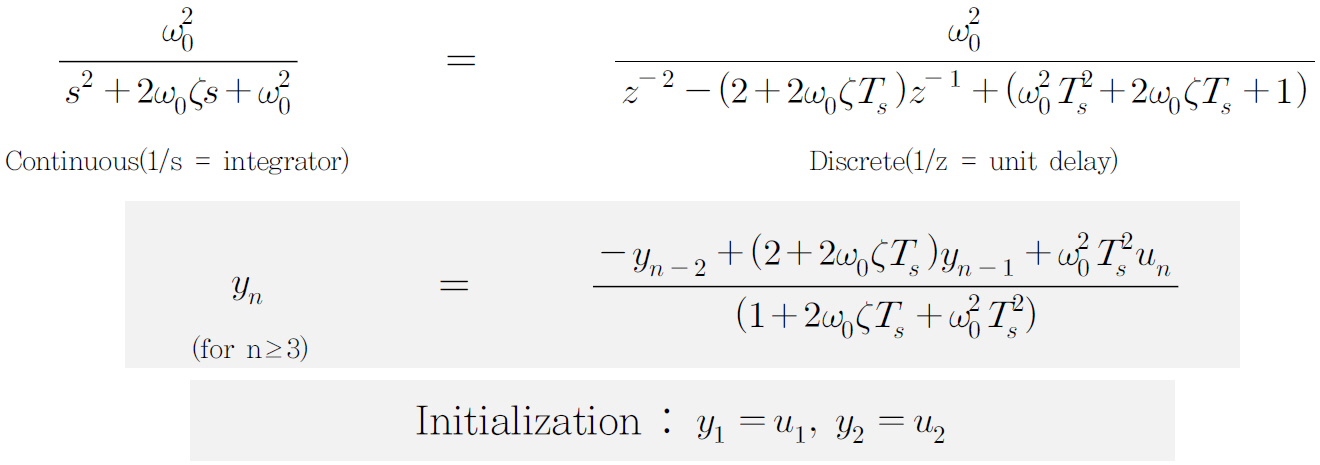
샘플링된 위경도 좌표를 사용한 헤딩값은 지구 곡면을 고려한 구면 삼각법을 사용하여 계산할 수 있고 거리값은 하버사인 공식(Haversine Formula)을 사용하여 계산할 수 있으며, 연속된 두 값을 이용하여 헤딩변화량과 거리변화량 계산을 통해 곡률값을 얻을 수 있다. 이에 대하여 수식 (3)과 같은 low-pass filter를 적용하여 노이즈를 제거하고 특이점 및 오차를 줄여 더욱 신뢰성 있는 값을 획득할 수 있도록 하였다. 또, 곡률반경은 곡률값의 역수를 취해 획득할 수 있다.
Discretized (unit-gain) second order low-pass filter(14)
(Filtered Curvature)
, =cutoff frequency, =damping factor, =sampling time, Note: =1(default) for a critically damped system
4.3. 급회전 검출 시스템
정밀도로지도는 특정 곡선 구간에 대해 Fig. 9와 같이 여러 개의 링크를 포함할 수 있기 때문에 하나의 링크만 이용해서는 정확한 도로의 곡률을 구할 수 없다. 따라서 연속된 곡선 구간의 곡률반경을 계산하기 위하여 정밀도로지도의 시작 링크부터 연결되는 링크를 탐색하여 하나의 선형으로 구성된 좌표 데이터를 생성한다. 생성된 선형을 기반으로 앞서 제안한 곡률반경 계산 알고리즘을 사용하여 일정한 거리로 데이터를 샘플링하고 실시간 곡률반경 값을 획득할 수 있다.
곡률반경에 따라 차량이 안전하게 주행할 수 있는 최고속도는 곡률반경, 도로 상태, 타이어와 도로 간 마찰력에 의해 수식 (4)와 같이 결정된다.(15) 이를 이용하여 차량의 현재 속도가 전방 Link의 최고 안전속도 보다 높을 경우, 급회전이라 판단하여 급회전 경고를 표시하고 안전속도를 초과하고 있음을 알릴 수 있다.
: 최고속도[m/s]
: 곡률반경[m]
: 중력 가속도
: 도로와 타이어 사이의 마찰계수(0.7~0.9)
5. 시험결과
5.1. Radius Of Curvature 정확도 시험
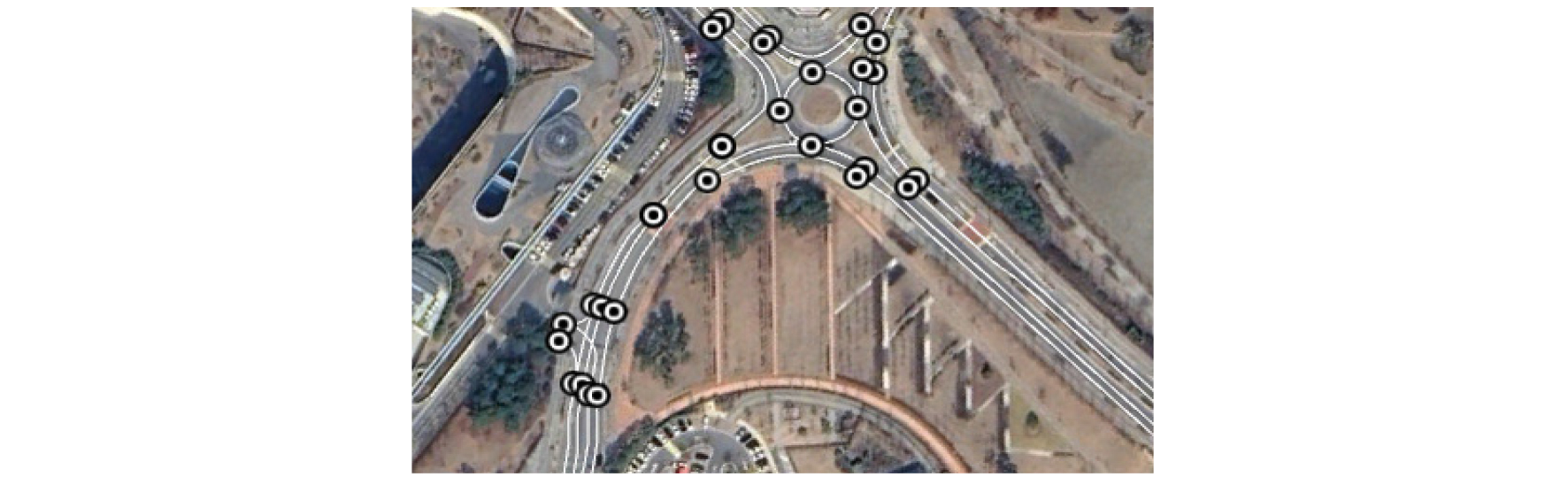
4.1에서 제안하는 곡률반경 검출 알고리즘의 정확도를 시험하기 위하여 Fig. 10과 같이 원형의 샘플 점군을 생성하고 해당 데이터의 WGS84 좌표계를 이용한 점의 좌표값을 사용하여 계산한 곡률반경 값과 실제 반경 값을 비교하여 해당 알고리즘의 정확도를 판별하였다.

이 데이터에서는 256개의 점군 데이터 중 직선 10 m 단위로 샘플링하여 45개의 데이터를 생성하여 테스트를 진행하였고, 곡률반경이 30, 50, 80, 100 m인 원형에 대하여 곡률반경 계산을 수행하였다.
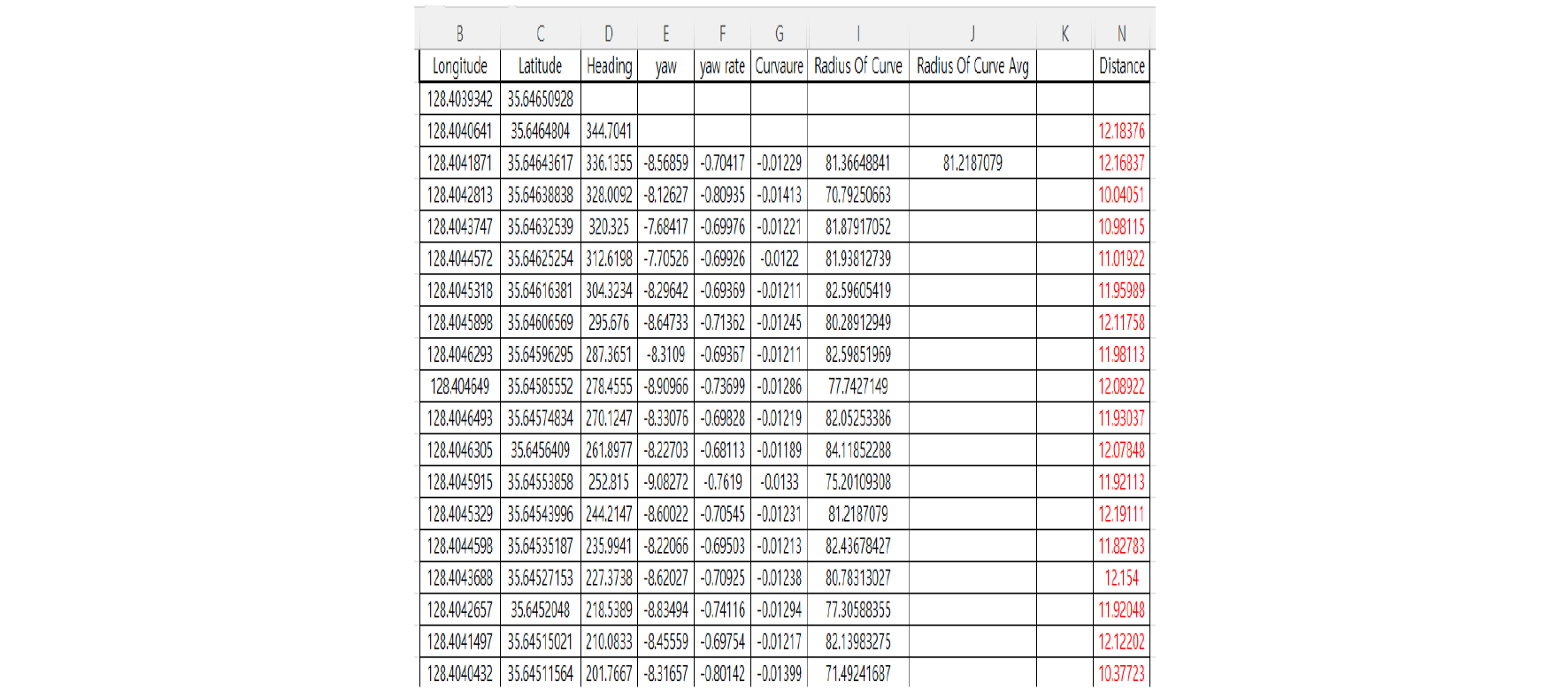
샘플링된 좌표는 존재하는 점들 중 10 m에 가장 근사한 값을 가지는 점을 이어서 가져오며 Fig. 11과 같이 Distance 값을 계산한 결과로 10~12 m 사이의 값을 가져온 것을 확인하였다. 각각의 샘플링된 좌표에서 이전 좌표와의 헤딩과 거리의 변화량을 계산하고 곡률을 계산하여 평균값으로 곡률반경을 구한다.
4개의 원에 대한 곡률반경 계산값은 Table 2와 같이 1.5~5.3%의 오차율을 나타냈고, 특히 곡률반경이 80 m인 원에서는 81.219 m로 지도에서 측정한 80.01 m 값과 오차율 1.5%를 보였다.
Table 2.
ROC calculation accuracy results
|
Real ROC [m] |
Number of Samples (N) |
Average Estimated ROC [m] |
Average Error (%) |
| 30 | 17 | 31.655 | 5.3 |
| 52 | 31 | 49.344 | 5.1 |
| 80 | 45 | 81.219 | 1.5 |
| 100 | 45 | 96.456 | 3.5 |
5.2. 필드 테스트
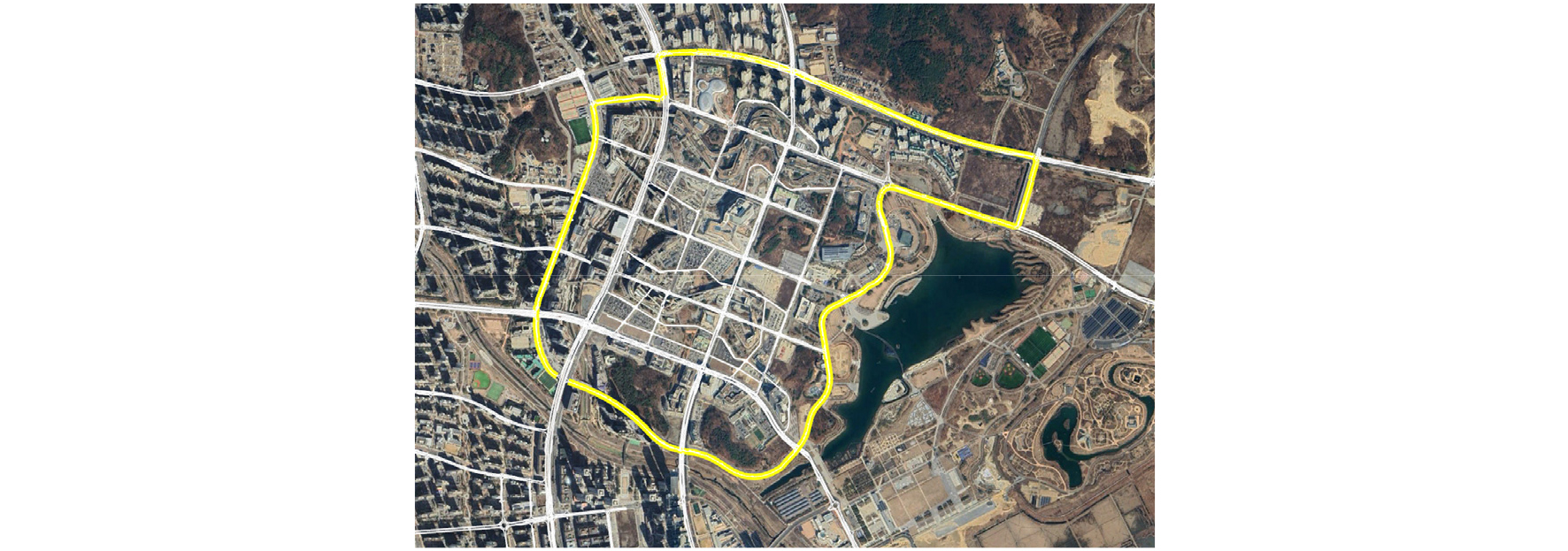
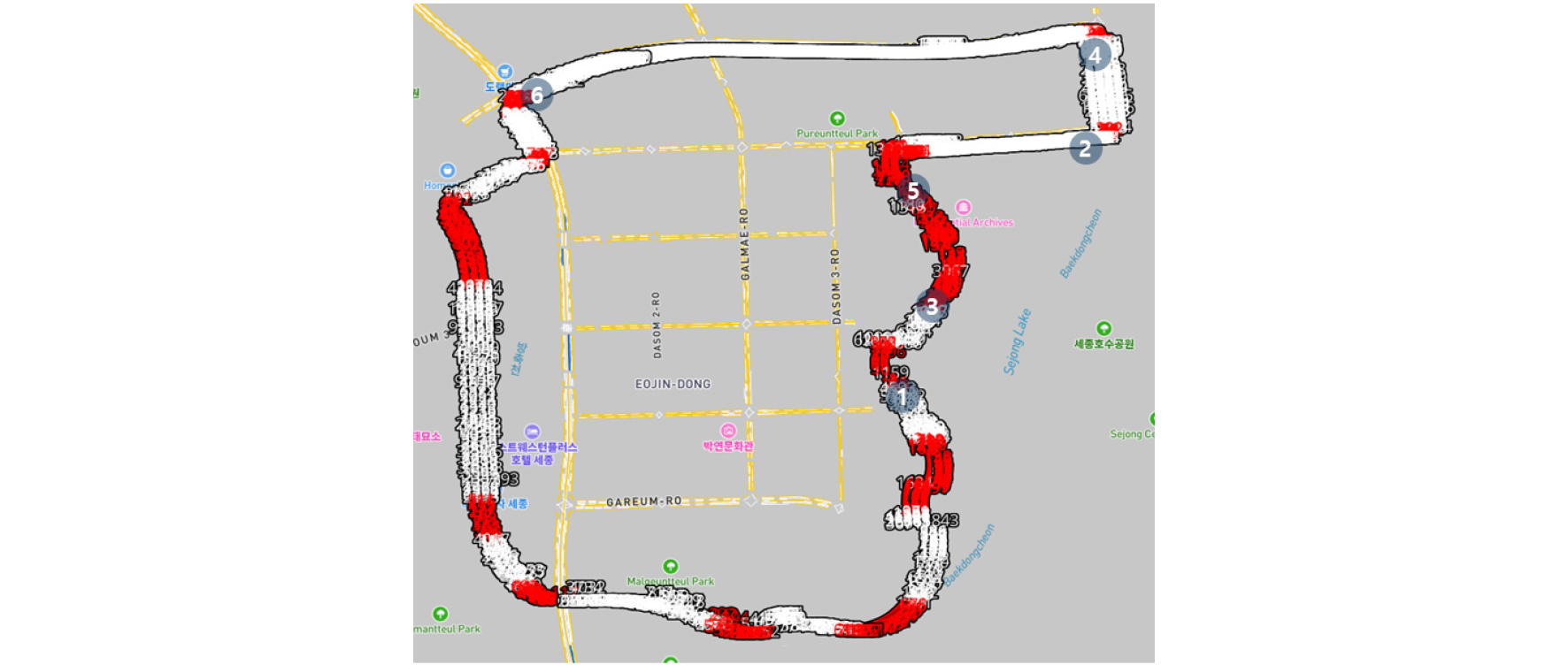
제안하는 급회전 검출 시스템의 실차 테스트는 정밀도로지도가 존재하고 급회전 구간이 명확한 세종시 정부청사 주변의 외곽도로를 수행하였다. 테스트 구간은 끊어지는 구간이 없도록 한 방향으로 주행하며 테스트할 수 있도록 선정하였으며 Fig. 12와 같다. 해당 구간에 대해 곡률반경을 사전에 계산하였을 때 곡률반경이 100 m 이하인 구간을 Fig. 13에 빨간색으로 표시하였고, 상대적으로 급격한 회전이 발생할 수 있는 구간을 의미한다.
필드 테스트에서는 차량이 주행하면서 차량의 위치값과 속도값을 이용하여 제안한 급회전 검출 알고리즘을 통해 현재 주행속도가 전방의 곡선도로 링크에서 안전하게 주행할 수 있는 속도를 넘었을 때 교통약자를 위한 알림 서비스를 정상적으로 제공하는지를 확인하였다.
5.3. 필드 테스트 결과
Fig. 13에 표시한 6곳에 대하여 차량이 주행하면서 실제 급회전 구간에 진입하기 전 현재 주행속도 대비 전방 Link에서의 급회전을 검출하여 Fig. 14~Fig. 19와 같이 경고 메시지가 HMI 화면에 표출되는 것을 확인하였다.






6. 결 론
본 연구에서는 자율주행차량에서 교통약자의 안전을 확보하기 위해, 자율주행 차량용 HMI와 급회전 검출 알고리즘을 제안하였다. 특히, 연산 부하를 줄이면서도 신뢰성 있는 곡률반경 값을 계산할 수 있도록 알고리즘을 설계하여, 실시간 주행상황에 효과적으로 대응할 수 있도록 하였다. 제안한 알고리즘을 통해 실시간으로 현재 주행속도 대비 전방 도로의 급회전을 검출하였고, 급회전 검출의 중요한 요소인 곡률반경 측정시 1.5~5.3%의 오차율을 나타냈다. 또, 실제 세종시의 정밀도로지도를 활용한 필드 테스트를 통해 차량이 급회전 구간을 진입하기 전 사전에 감지하여 경고 메시지 제공이 가능함을 확인하였다.
본 눈문에서 제안한 알고리즘은 도로 데이터 샘플링을 통한 급회전 구간 검출 시 급회전뿐만 아니라 불연속적인 선형의 점들 또한 급회전 구간으로 검출되는 단점이 있었으나 곡률반경 평균값을 사용하여 단점을 보완하였고, 차량의 현재 위치와 속도 정보를 사용하여 교통약자가 자율주행차량을 이용 시 발생할 수 있는 급작스러운 차량 움직임에 미리 대비할 수 있도록 하였다.
교통약자(장애인, 노약자 등)는 일반인보다 차량 탑승시 안전에 대한 더 많은 주의와 배려가 필요하며, 교통약자에 직접 경고를 제공하거나 운전자와 자율주행시스템에 다양한 제어 정보를 제공하여 안전하게 주행할 수 있도록 주의를 기울이게 할 수 있다. 이번 연구를 통해 자율주행 차량의 안전성 증대와 더불어 교통약자를 포함한 다양한 사용자에게 혜택을 제공하는 포용적인 교통 시스템 구축에 기여할 것으로 기대된다.
