

1. 서 론
2. 국제기준 제·개정 현황
2.1. 비자율주행자동차의 EDR
2.2. 자율주행자동차의 EDR/DSSAD
3. 국내 자율주행 임시운행 허가차량 사고사례
3.1. 자율주행자동차 임시운행 허가차량 사고조사 개요
3.2. 사고조사에 활용한 데이터의 특성
4. 데이터 기록장치의 기록 조건·항목 방향성
4.1. 데이터 기록 조건
4.2. 데이터 기록항목
5. 결 론
1. 서 론
자율주행자동차 임시운행 허가를 활용한 실증 및 시범운행 서비스 확대와 더불어 자율주행자동차 사고가 증가하고 있으며, 이에 따라 책임소재 규명에 대한 문제가 새롭게 주목받고 있다. 일반시민을 대상으로 한 자율주행자동차 인식 설문조사 결과, 시스템 고장으로 인한 사고 우려에 이어 사고 발생 시 책임 소재 구분이 모호할 것이라는 의견이 뒤를 이었다.(1)
일반적으로 사고 시 사고 상황을 보다 더 잘 이해하기 위해 사고기록장치(EDR, Event Data Recorder)를 조사에 활용하고 있다. 그리고 향후 자율주행시스템(ADS, Automated Driving System)의 책임소재 규명 등의 목적을 위해 자율주행정보 기록장치(DSSAD, Data Storage System for Automated Driving)에 대한 규정이 국제기준(UN Regulation No. 157)과 국내 안전기준에 명기되어 있다.
국제적으로 EDR과 DSSAD를 활용한 자율주행자동차의 사고 책임소재 규명 외에도 자율주행시스템의 안전 성능에 대한 지속적인 연구가 필요하다고 여겨져 왔다. 이에, 유엔유럽경제이사회(UNECE, United Nations Economic Commission for Europe)의 자동차 국제기준 조화기구(WP.29, World Forum for Harmonization of Vehicle Regulations) 산하의 일반안전 전문분과(GRSG, Working Party on General Safety)와 자율주행 전문분과(GRVA, Working Party on Automated/Autonomous and Connected Vehicles)가 함께하는 전문가그룹(EDR/DSSAD IWG)에서는 자율주행자동차 EDR과 DSSAD에 대한 논의를 개시하였다. EDR/DSSAD IWG는 자율주행자동차의 사고원인 규명 및 자율주행 시스템 안전성능 모니터링을 위해 필요한 데이터 기록항목 및 기록조건에 대해 논의하고 있다.
23년 8월, 미국 캘리포니아 공공 유틸리티위원회(California Public Utilities Commission)는 샌프란시스코 지역에서 지엠 크루즈와 구글 웨이모 자율주행자동차의 24시간 운행을 허가하였다.(2,3) 그러나, 자율주행 로보택시는 통신 오류 등으로 차량이 정지하거나 긴급차량의 출동을 방해하고, 심지어 긴급차량과 충돌하는 사고가 발생하였으며, 이에 따라 지엠은 로보택시의 운행을 50% 감축하였다. 이렇듯 전 세계적으로 자율주행자동차의 운행이 점차 확대됨에 따라 사고 및 위험 상황이 확인되고 있으나, 사고를 유형별로 분류하고 분석할 수 있는 사례가 부족하여 자율주행자동차의 EDR과 DSSAD에 관한 연구와 논의가 미흡한 실정이다.
본 연구는 향후 자율주행자동차의 사고나 위험 상황에서 사고원인과 책임소재 등을 분석하기 위해 자율주행자동차의 EDR과 DSSAD에 기록해야 할 데이터 기록 항목과 기록 조건의 방향성을 제시한다. 다만, EDR과 DSSAD를 구분하지 않고 전반적인 자율주행자동차의 사고나 위험 상황 분석을 위한 기록 조건과 기록 항목에 대해 언급한다. 이를 위해 국제적으로 EDR 및 DSSAD와 관련한 자율주행자동차 기록데이터에 대한 논의 현황과 우리나라의 자율주행자동차 임시운행 허가차량의 사고조사 사례를 분석하였다. 분석 내용을 바탕으로 향후 자율주행자동차의 사고 및 위험 상황으로 판단해야 할 기록 조건과 이를 위해 기록해야 할 데이터 항목에 대한 방향성을 제시하였다.
2. 국제기준 제·개정 현황
2.1. 비자율주행자동차의 EDR
UNECE WP.29는 1, 2단계로 구분하여 EDR 기준 제정을 위한 논의를 진행하고 있다. 현재는 1단계로 비자율주행자동차의 EDR을 논의하고 있으며, 향후 자율주행자동차의 EDR에 대해 논의할 예정이다. EDR/DSSAD IWG의 논의 결과에 따라, 유럽 자동차 분류기준인 M1, N1에 해당하는 비자율주행자동차의 EDR UN 규정(UN R160, UN Regulation No. 160)이 2021년 3월에 마련되었다.(4) UN R160은 00 시리즈와 01 시리즈로 구분된다. 00 시리즈는 우리나라 및 미국 기준과 유사하며,(5) 01 시리즈는 00 시리즈에 ADAS 기술과 관련한 기록 항목이 추가되었다.(6) 현재는 3,500 kg 이상의 대형·화물자동차와 관련된 유럽 자동차 분류 기준인 M2, M3, N2, N3에 해당하는 비자율주행자동차의 EDR 규정을 논의하고 있다.
2.2. 자율주행자동차의 EDR/DSSAD
UN R160(EDR) 국제기준 제정 이후, DSSAD의 기준 제·개정을 위한 논의가 진행되고 있다. 현재 DSSAD의 국제기준은 UN Regulation No. 157(UN R57) Automated Lane Keeping Systems에 일부 내용이 포함되어 있으며,(7) 우리나라는 ‘자동차 및 자동차부품의 성능과 기준에 관한 규칙’ 제111조의3 승용자동차의 부분 자율주행시스템 안전기준 [별표 27] ‘부분 자율주행시스템의 안전기준’에서 규정하고 있다.(8)
EDR/DSSAD IWG은 자동차 사고조사를 효과적으로 수행하기 위한 장치를 EDR로 정의하고, 전반적인 자율주행시스템의 안전 성능을 평가 및 모니터링하고, ADS가 차량을 제어하는 시점을 식별하기 위한 장치를 DSSAD로 정의하였다.(9) 다만, EDR과 DSSAD는 주행 정보를 기록한다는 공통점이 존재함에 따라 EDR의 기록조건이 충족되는 사고에서 DSSAD의 기록정보가 EDR의 기록정보와 연결될 수 있도록 별도의 데이터를 표시하여 기록데이터 간 교차분석 및 보완이 필요하다는 의견도 제시하였다.
DSSAD의 정의를 마련한 뒤, EDR/DSSAD IWG은 기록 조건과 기록 항목에 대해 우선 논의하였다. GRVA 산하 자율주행 안전성 검증방법 전문가그룹(VMAD, Validation Method for Automated Driving)은 ‘비중요 사건’(non-critical occurrence)과 ‘중요 사건’(critical occurrence)으로 구분한 DSSAD의 기록 조건을 제안하였다.(10) ‘비중요 사건’은 자율주행시스템이 주행안전에 영향을 주었거나, 영향을 줄 가능성을 내포하였으며, 단순 접촉사고 등 경미한 사고와 관련한 작동 중단, 결함, 또는 기타 상황을 포함하고 있다. ‘중요 사건’은 인적 및 물적 피해가 발생하거나 에어백과 같이 비가역안전장치가 작동하는 사고와 직접적인 관련이 있다. VMAD는 앞서 정의한 ‘비중요 사건’과 ‘중요 사건’을 활용하여 DSSAD의 데이터 기록 조건을 Table 1과 같이 제안하였다. 예를 들어, ‘중요 사건’의 정의를 활용하여 비가역안전장치가 작동하는 ‘Impact event’를 제안하고, ‘비중요 사건’ 정의를 활용하여 자율주행시스템의 중단, 결함 등을 가정한 ‘운행가능영역 범위 이탈(ODD exit)’, ‘최소 위험 운전(MRM, Minimum Risk Maneuver)’ 등을 제안하였다.
Table 1.
DSSAD triggers proposed by VMAD
한편, EDR과 DSSAD는 각각 ‘time series’ 방식과 ‘time stamp’ 방식으로 사고 또는 위험 상황과 관련한 데이터를 기록한다. EDR에 기록하는 사고 전 데이터(pre-crash)와 같이 일정한 시간 범위와 일정한 기록 주기를 갖고 순차적으로 기록하는 동적 시계열 방식을 ‘time series’ 방식이라고 한다. 한편, 현 DSSAD의 기록 방법은 자율주행시스템의 ‘켜짐’ 또는 ‘꺼짐’ 등 특정 기록 조건이 발생한 경우, 그 시점의 시간과 상태 값을 기록하는데 이를 ‘time stamp’ 방식이라 한다. 만약, EDR과 DSSAD의 기록조건을 비가역안전장치의 작동으로 채택할 경우, 에어백 또는 안전띠 프리텐셔너 전개 등 어느 정도 물적 피해가 발생한 사고에서 ‘time series’ 방식의 EDR과 ‘time stamp’ 방식의 DSSAD 데이터를 종합하여 사고 상황을 분석할 수 있을 것이다. 다만, 비가역안전장치가 작동하지 않은 경미한 사고나 사고에 근접한 위험한 상황(near-miss)’의 경우에는 EDR에 데이터가 기록되지 않을 가능성이 있다. 이 경우, DSSAD에 기록된 ‘time stamp’ 데이터만으로는 차량 속도, 가속도 등 실시간으로 변화하는 동적 주행 정보를 분석할 수 없어 자율주행시스템의 안전 성능 평가나 모니터링에 한계가 예상된다.(11) 이러한 한계 상황은 VMAD가 제안한 ‘비중요 사건’ 개념과 ‘near-miss’ 이벤트와 연관된다. 한편, 우리나라의 교통사고 상해 등급별 인원 및 보험금 현황에서 연도별로 경미한 사고로 인한 상해 인원이 약 90%를 차지하고 있다는 것은,(12) ‘near–miss’ 이벤트로 인한 부상자가 많이 발생한다는 것을 의미하며, 앞으로 ‘near-miss’ 이벤트를 대비한 EDR과 DSSAD의 기록 조건 마련과 ‘time series’ 기록 방식을 포함하는 DSSAD 기록 항목 마련의 필요성을 대변한다고 볼 수 있다. EDR/DSSAD IWG은 DSSAD 기록항목을 Table 2와 같이, 자율주행시스템과 이벤트에 대한 기본정보와 차량의 최종적인 거동, 자율주행시스템에 의해 요구된 주행 관련 설정값, 주변 도로 및 대상 물체의 정보, 운전자 조작 및 개입 정보 등 5가지 범주로 구분하였다.(13) 5가지 범주 중 앞선 3가지 범주는 차량적 관점의 분류로, 차량의 최종적인 거동과 자율주행시스템에 의해 요구된 주행 관련 설정값을 나타낸다. 이어지는 2가지 범주는 환경적 관점과 인적 관점으로 분류하였다. 이러한 분류는 과거부터 사고 조사 및 분석에 활용되어 온 ‘차량적’, ‘인적’, ‘환경적’ 요인 등 자동차 사고 요인과 연관된다.(14) 이러한 범주별 기록 항목들은 자율주행시스템의 안전 성능을 평가하고 모니터링하는 것뿐만 아니라 자율주행자동차 사고조사 및 책임소재 규명에도 일정 부분 활용하고자 하는 의도도 포함되어 있다. 앞으로 EDR 및 DSSAD 장치 간 차별성에 대한 논의를 통해 장치별 기록 조건과 기록 항목에 대한 세분화가 이뤄질 것으로 전망한다.
Table 2.
DSSAD data elements category plan
3. 국내 자율주행 임시운행 허가차량 사고사례
3.1. 자율주행자동차 임시운행 허가차량 사고조사 개요
국내 자율주행자동차 임시운행 허가차량은 ‘자율주행자동차의 안전운행 요건 및 시험운행 등에 관한 규정’에 따라 안전운행 및 임시운행 요건을 충족시켜야 한다.(15) 자율주행자동차 임시운행 허가차량 사고조사 시, 영상기록장치, 운행기록장치, 별도기록장치 및 EDR 데이터 등 사고와 관련된 다양한 정보를 수집하였다. ‘자율주행자동차의 안전운행 요건 및 시험운행 등에 관한 규정’ 제17조에 따라 운행기록장치를 통해 ‘차량속도’, ‘엔진 또는 모터 회전수’, ‘GPS 위치정보’, ‘제동·가속제어 조종장치의 신호 및 작동주체’ 등 9개의 기록항목을 기록해야 하나, 기록할 수 없는 경우 별도기록장치를 장착하여 해당 정보를 기록해야 한다. 이렇게 수집된 정보의 개별적, 복합적 분석을 통해 사고의 원인과 책임소재를 규명한다.
한편, 현재 국내 자율주행자동차 임시운행 허가차량이 사고가 발생한 경우 ‘자율주행자동차사고조사위원회사무국’에서 사고조사를 수행하며, 정밀한 분석이 요구되는 사고의 경우 자동차 사고조사에 경험 있는 ‘한국교통안전공단 자동차안전연구원 중대사고조사처’에 조사를 의뢰하고 있다. 본 절에서는 ‘중대사고조사처’에서 2022년부터 2023년 9월까지 조사한 국내 자율주행자동차 임시운행 허가차량의 사고 개요와 사고 조사 과정 중 확인되었던 특이점을 중점적으로 언급하였다. 본 절에서 제시한사고 조사 사례는 VMAD가 정의한 ‘비중요 사건’에 해당하였다. 아울러, 자율주행자동차 임시운행 허가차량에는 시험운전자가 탑승하므로 사고 발생 시점에서 시험운전자가 제어권을 전환하여 사고 상황을 대응하였다. 따라서 VMAD가 제안한 ‘비중요 사건’의 세부적인 기록조건에는 ‘Passenger emergency or remote operator control override mechanism’에 해당한다고 판단하였다.
본 절에서 언급하는 시스템 우선모드는 자율주행자동차의 운전조작에 대한 권한이 자율주행시스템에게 부여된 자율주행시스템의 작동모드를 의미하며, 운전자 우선모드는 자율주행자동차의 운전조작에 대한 권한이 운전자에게 부여된 자율주행시스템의 작동모드를 의미한다.
3.1.1. A 사례
시스템 우선모드로 주행 중이던 자율주행 임시운행 허가차량이 임시운행 불가영역인 어린이 보호구역에 진입하기 전, 운전자에게 경고를 알리고 운전자 우선모드로 전환되었으나 운전석에 탑승하였던 시험운전자는 제어권이 전환되었다는 사실을 인지하지 못했다. 이후, 자율주행 임시운행 허가차량은 운전자 우선모드에서 운전자의 개입 없이 타력주행 주행하여 회전교차로 중앙에 있는 도로표지판을 충격하고 정지하였다(Fig. 1).

사고조사 과정 중 사고현장의 특이점에 대해 확인하였다. 자율주행자동차 임시운행 허가차량이 주행한 어린이보호구역의 제한속도는 일반적인 어린이 보호구역의 제한속도보다 10 km/h 낮은 20 km/h이었으며, 자율주행자동차 임시운행 허가차량은 30 km/h 속도로 어린이보호구역을 주행하였다는 사실을 확인하였다. 한편, 시험운전자는 도로표지판에 충격하기 직전까지 조향핸들을 조작하지 않았으나 시험운전자의 조향핸들 조작에 의해 시스템 우선모드가 해제된 것으로 기록된 오류를 확인하였다.
3.1.2. B 사례
1, 2차로가 좌회전 전용차로인 교차로에서 시스템 우선모드로 주행 중인 자율주행자동차 임시운행 허가차량은 2차로에서 좌회전하였고, 좌회전 구간을 지나 직진 구간에 진입하고 있었다. 이때 1차로에서 좌회전하던 택시가 직진 구간에 진입하면서 자율주행자동차 임시운행 허가차량의 좌측 후면을 충격하는 사고가 발생하였다(Fig. 2).

사고조사 중 확인된 특이점으로, 사고 현장의 주변환경 및 고정밀 지도의 분석을 통해 직사각형 형태의 교차로와 교차로 방향으로 돌출된 보행섬으로 인해 좌회전이 끝나는 구간에서 좌회전 유도선의 곡률이 급격하게 증가한다는 점이었다. 이로 인해 자율주행자동차 임시운행 허가차량의 좌측 후륜이 곡률이 급격히 증가하는 교차로 내 좌회전 구간 끝 부분에서 1차로 차선 일부를 침범하면서 2차로 직진 구간에 진입한 것으로 확인하였다.
3.1.3. C 사례
자율주행자동차 임시운행 허가차량이 운전자 우선모드로 1차로 좌회전 전용구간에 진입하는 과정 중, 우측차로에서 신호대기 중인 차량의 사이드미러와 접촉하는 사고가 발생하였다(Fig. 3).

운행기록장치, 별도기록장치 등 다양한 데이터 비교·분석 결과, 운전자 우선모드로 2차로에서 1차로 좌회전 전용구간에 진입하는 과정 중 우측차로와 충분한 측면간격을 확보하지 않고 주행하다 접촉 사고가 발생했다는 것을 확인하였다.
3.1.4. D 사례
시스템 우선모드로 주행 중이던 자율주행자동차 임시운행 허가차량이 T자형 교차로에서 우회전하기 위해 가다 서다를 반복하였다. 이 때 뒤따르던 후행 차량이 자율주행 임시운행 허가차량의 후미를 추돌하였다(Fig. 4).

사고조사 과정에서 자율주행자동차 임시운행 허가차량이 도로 환경요인으로 인해 원활하게 우회전하지 못하는 것을 확인하였다. 이는 T자형 교차로 내 우회전 전용차로에서 직진하는 차량이 있었으며, 이로인해 우회전 차로에서 주행하는 차량의 직진 가능성을 자율주행자동차 임시운행 허가차량이 지속적으로 판단하고 있었기 때문이다. 따라서 자율주행자동차 임시운행 허가차량이 원활히 우회전할 수 있도록 안전지대 확대, 시선 유도봉 설치 등 교통환경 개선의 필요성을 확인하였다. 한편, 시스템 우선모드에서 자율주행자동차 임시운행 허가차량의 후미가 추돌되었으나 자율주행시스템은 이 사실을 인지하지 못하였다는 것을 확인하였다. 이는 자율주행자동차 임시운행 허가차량에 탑재된 자율주행시스템이 시스템 자체의 실패 또는 고장 상황과 달리 사고로 인지하는 별도 알고리즘이 존재하지 않기 때문으로 여겨진다. 이러한 사고 인지 알고리즘의 부재는 아직까지 이러한 내용이 제도화되지 않았기 때문이며, 다른 자율주행자동차 임시운행 허가차량 사고에서도 확인되었다.
3.1.5. E 사례
자율주행자동차 임시운행 허가차량이 시스템 우선모드로 우측 포켓차로 버스 정류장에 정차했다가 재출발하는 과정에서 앞으로 끼어드는 차량과 접촉하는 사고가 발생하였다(Fig. 5).
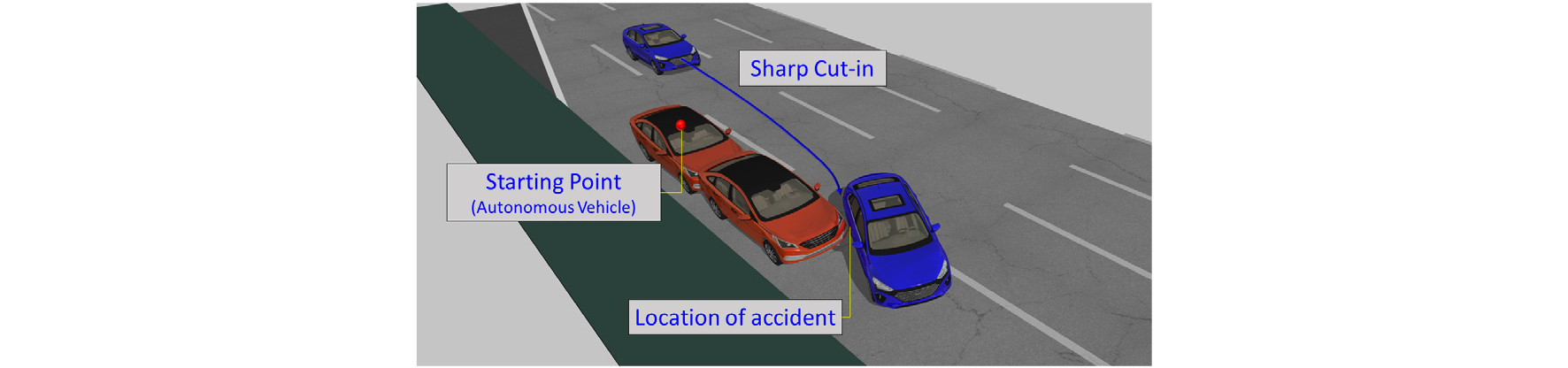
해당 사고에서 자율주행자동차 임시운행 허가차량이 접촉사고 직전 접근하는 상대 차량을 인지하고 적절히 감속했는지 여부를 확인하였다. 이를 위해 시스템 우선모드에서 자율주행시스템이 요구한 가속도와 요구된 가속도를 통한 최종적인 차량속도 등 사고 당시 주행 기록을 활용하였다. 또한, 자율주행시스템의 객체 인지 및 반응 시점을 확인하기 위해 요구된 가속도값과 차량속도 등 텍스트 기반의 주행 기록데이터를 ‘time series’ 방식으로 분석하였다. 이를 통해 일정한 시간 범위 내 실시간으로 변화하는 동적 주행 상태를 분석하였고, 분석결과를 바탕으로 자율주행자동차 임시운행 허가차량이 앞으로 끼어드는 차량을 인지하고 적절히 제어했다고 판단하였다.
3.2. 사고조사에 활용한 데이터의 특성
Table 3은 운행기록장치와 별도기록장치 등 자율주행자동차 임시운행 허가차량 사고분석에 활용한 기록 항목들을 예시를 나타내었다. 자율주행자동차 사고를 조사함에 있어 자동차 사고 기여 요인 3가지와 자율주행 3요소인 ‘인지’, ‘판단’, ‘제어’를 활용하여 복합적으로 분석하였다. 이는 자율주행시스템이 ‘주변 객체·환경’을 ‘인지·판단’하여 ‘차량’을 ‘제어’하고 위험 상황에서 시스템의 요청에 의하거나 ‘운전자’가 인지하여 개입할 수 있기 때문이다. 실례로 미국 도로교통안전위원회(NTSB, National Transportation Safety Board)의 테슬라 차량 사고조사 시, 오토파일럿 등 사고 차량의 주행상황 분석 외에도 도로의 기하하적 구조와 운전자의 휴대전화 사용기록 등을 종합적으로 확인하여 조사결과를 도출하는 것과 같은 맥락이다.(16)
Table 3.
Data elements related to contributing factors for crash and ADS
한편, 3.1절의 자율주행 임시운행 허가차량의 사고조사 시 자율주행시스템의 안전 성능을 확인하기 위해 ‘time series’ 방식을 활용하였다. 이러한 방식을 채택함으로써 차량속도, 종·횡방향 가속도 등 지속적으로 변화하는 차량의 동적 주행 상태값을 적절히 분석할 수 있었다. 한편, 주변 환경 및 주행 상황을 인지하고 종합적으로 판단하여 주행하는 자율주행자동차의 특성으로 인해 사고 당시 주변 환경을 보다 면밀히 검토할 필요가 있었다. 따라서 시간별 위·경도와 Yaw rate 등을 활용하여 시점별 차량의 위치와 해당 장소의 특성을 검토하였다. 그리고 시험운전자가 위험상황을 대비하여 개입하는 경우가 존재하였기 때문에 어느시점에 시험운전자가 가속·제동·조향의 방법을 활용하여 개입하였는지 가속페달 조작량, 제동페달 조작여부, 조향핸들각도 값을 활용하였다.
4. 데이터 기록장치의 기록 조건·항목 방향성
4.1. 데이터 기록 조건
기록 조건은 사고 또는 위험 상황을 대표적으로 나타낼 수 있는 조건으로 설정해야 한다. 앞에서 언급한 ‘비중요 사건’과 ‘중요 사건’의 정의를 활용하여 데이터 기록 조건 방향성을 크게 ‘사고상황’과 ‘위험상황’으로 구분하여 제안한다. ‘사고상황’의 대표적인 예로는 에어백 및 안전띠 프리텐셔너와 같은 비가역안전장치가 작동하는 사고가 있다.
한편, ‘위험상황’의 대표적인 예로는 앞 절에서 언급한 ‘near-miss’ 이벤트가 있다. ‘near-miss’ 이벤트와 관련한 기록 조건을 고려할 때 중요한 점은 위험상황을 초래한 요인에 운전자의 의도가 포함되었는지 확인하는 것이다. 자율주행자동차가 운행가능영역(ODD)을 이탈할 경우, 해당 행위가 운전자의 의도가 아닌 자율주행시스템의 고장 또는 오판단에 의한 것이면 near-miss 이벤트로 판단하고 기록해야 한다. 또한, ‘near-miss’ 이벤트가 발생했을 때 자율주행시스템의 안전성능 확인 및 책임소재 규명 등을 위해 DSSAD 데이터 중 차량 동적 주행상태값과 관련하여서는 ‘time series’ 방식으로 기록하여야 한다.
4.2. 데이터 기록항목
자동차 사고 기여요인 3가지와 자율주행 3요소를 종합적으로 고려한 데이터 기록 항목안은 Fig. 6과 같다. 자율주행 중 운전자 개입에 대한 부분은 인적 요인으로 간주할 수 있으며, 관련된 기록 항목으로는 ‘가속페달 조작량’, ‘제동페달 스위치 작동여부’, ‘조향핸들각도’, ‘자율주행 조종장치’ 작동 등이 있다. 그리고 자율주행시스템의 인지(perception), 판단(planning)과 관련된 주행 당시 차량의 위치, 제한속도, 차로 정보, 주변 타겟 물체의 정보 등은 환경적 요인으로 간주할 수 있다.

다만, 자율주행시스템의 ‘판단’에는 ‘규칙 기반(rule-based)’ 또는 ‘인공지능 기반(AI-based)’ 접근법이 존재하는데, 다양한 도로 환경을 효과적으로 판단하기 위해서 각 접근법이 복합적으로 활용되고 있으며, ‘인공지능 기반’ 접근법은 다양한 변수를 확률적으로 분석하여 접근하기 때문에 사후에 어떠한 절차로 판단 결과가 형성되었는지 추정하기 어렵다는 한계가 있다. 마지막으로 인지·판단을 통한 최종적인 차량 제어값인 차량속도, 종·횡방향 가속도 등은 제어(control)와 관련된 차량적 요인을 볼 수 있다.
한편, 자율주행 임시운행 허가차량의 사고조사 과정에서, 텍스트 기반 데이터의 신뢰성을 확인하거나 명확한 사고시점을 파악하기 위해 영상기록을 활용하였다. 이와 관련하여 미국자동차공학회(SAE, Society of Automotive Engineers)도 자율주행자동차 데이터 로거(data logger)의 기록 항목으로 사고 당시 이미지 기록의 필요성을 언급하였다.(17) 사고 당시 사진 또는 영상이 기록될 경우 텍스트 기반의 데이터와 영상 간 동기화를 통해 사고상황을 보다 명확히 파악하고 필요한 텍스트 기반의 기록항목 수를 줄일 수 있을 것으로 예상된다. 다만, 개인정보 취득에 대해 민감한 국가 또는 문화권으로 인해 영상 기록데이터를 국제기준으로 명문화하기에 어려울 수 있으므로 대안으로 텍스트 기반의 기록항목을 같이 고려하여야 한다.
5. 결 론
본 논문에서는 최근 UNECE WP.29 EDR/DSSAD IWG의 자율주행자동차 기록데이터 관련 논의 사항을 분석하였으며, 국내 자율주행 임시운행 허가차량의 사고사례 분석을 통해 자율주행자동차에 기록하여야 하는 데이터의 기록 조건 및 기록 항목의 방향성을 제시하였다. 본 논문의 주요 결과를 요약하면 아래와 같다.
1) VMAD가 정의한 ‘비중요 사건’ 또는 ‘near-miss’ 이벤트와 관련한 적절한 기록조건이 마련되어야 한다. 이를 통해 비충돌 또는 경미한 사고에서도 자율주행시스템의 안전성능을 평가하고 보완할 수 있어야 하며, 책임소재를 규명할 수 있는 데이터 기록이 원활히 이뤄져야 한다.
2) 자율주행자동차에서 발생할 수 있는 다양한 유형의 사고조사 및 안전성능 모니터링을 위해서는 자동차 사고 기여요인 3가지와 더불어 자율주행 3요소인 ‘인지’, ‘판단’, ‘제어’를 복합적으로 고려하여 기록 항목을 도출하여야 한다.
3) 자율주행자동차의 판단 특성으로 인해 자율주행시스템의 판단과 관련된 기록 항목 마련이 쉽지 않을 것임으로 자율주행시스템이 무엇을 인지하고 어떻게 제어했는지에 보다 집중해야 한다.
4) 자율주행자동차에 기록되는 텍스트 기반의 기록 항목도 중요하지만, 사고 전·후의 이미지나 사고 당시 영상이 같이 기록되는 경우 데이터의 신뢰성 판단, 명확한 사고 시점 및 위험 상황 분석 등에 도움이 될 수 있다.
향후, 본 논문에서 언급한 기록 조건과 기록 항목의 방향성은 앞으로 추가적인 국내·외 자율주행자동차의 사고 사례의 확인, UNECE WP.29 EDR/DSSAD IWG 논의 결과, 자율주행자동차의 사고 유형 연구 등에 따라 세부 방향성이 보완 및 수정되어야 한다.
