1. 서 론
2. 수동주행 데이터
3. 판단 알고리즘
4. 차량 종방향 모델링 및 제어 알고리즘
4.1. 차량 동역학적 종방향 모델
4.2. 모델 예측 제어 알고리즘
4.3. 기준 상태
5. 시뮬레이션
5.1. 시뮬레이션 설계
5.2. 시뮬레이션 결과
6. 결 론
1. 서 론
자율주행 자동차의 인지, 측위, 판단, 제어기술이 고도화됨에 따라 차체 및 시스템의 안정성과 승차감 개선으로 인한 불안감 해소에 이목이 집중되고 있다. 자율주행차의 안정성을 위해서는 시스템이 측정 불확실성에 대한 정보를 알고 대응하고, 외란에 대한 강건함을 보장해야 한다. 자율주행차 탑승자가 편안한 승차감을 느끼기 위해서는 주행형태가 수동주행과 유사해야 되며, 안정성이 보장되는 범위 안에서 합리적이되 지나치게 보수적이지 않은 거동을 보여야한다.
자율주행차의 종방향 거동은 선행차량 및 전방 장애물과의 충돌 방지에 대한 안전을 보장함과 동시에 탑승자에게 불안함 및 주행 이질감을 주지 않아야 한다. National Highway Traffic Safety Administration에서 공개한 2007년 설문(1)에 따르면 어댑티브 크루즈 컨트롤 기능에서 가장 개선해야할 요소는 승차감이라고 하였다. 편안한 종방향 거동을 결정짓는 요소는 가속도와 가가속도(jerk)다. 종방향 가속도와 가가속도를 제한하여 차량을 제어하면 분명 탑승자에게 편안함을 제공할 수는 있지만, 필요 제어 입력이 실행 불가능할 수 있어 충돌 방지에 대한 안전성을 장담할 수는 없다. 반면에 전방 충돌을 확실하게 방지하고자 가속도 및 가가속도의 입력을 과하게 가하면 승차감에 악영향을 미친다. 더불어 자율주행차가 측정한 전방 차량 및 장애물까지의 거리는 실제 값과 오차가 있는데 이 측정의 불확실성을 무시한 채 종방향 거동을 설계하면 인지 성능이 저하된 악의 상황에서 안전성에 문제가 발생한다.
John-Jairo Martinez(2,3)는 크루즈 컨트롤을 위한 새로운 차간거리 기준 모델을 제안했다. 이 차간거리 참조모델에서의 종방향 제어 입력은 Hunt(4)가 제안한 비선형 댐퍼/스프링 모델을 따르며, 제어 입력이 실행 가능할 수 있는 최대 가속도와 가가속도는 수학적으로 구해진다. 이 모델에서는 자차량이 선행차량과 적절한 차간 거리를 유지하며 속도와 가속도를 추종하지만, 정지 혹은 저속의 차량을 대상으로 감속할 때에는 초반에 과도한 제동입력이 가하는 모습이 관찰됐다. Li-hua LUO(5)는 모델 예측 제어(Model Predictive Control, MPC) 기법을 이용하여 승차감, 연비, 안전성을 고려한 적응형 크루즈 컨트롤을 제안하였다. 안전성 보장을 위해 차간거리가 최소 안전거리보다 길다는 구속조건을 있고, 승차감과 연료 효율성을 위해 가속도와 가가속도의 범위에 대한 구속조건이 있다. 차간거리에 대한 기준 모델로 Constant Time Headway(CTH)를 적용하였고, 레귤레이터 제어기를 구성했기에 감속 거동에서 초반에 과도한 가속도로 제동하다가 저속에서 완화되는 형태가 나타났다. Taewon Kang(6)은 승차감을 위해 감속하는 차량의 속도와 가속도 프로파일을 세 구간으로 구분하고 경계에서 연속성을 만족시킴과 동시에 가속도와 가가속도의 한계를 만족시키는 삼각함수 형태의 함수를 제안하였다. 그에 따라 차량이 감속을 시작해야하는 차간 거리가 계산되는데 이는 자율주행 차량의 전방인지거리 한계를 대응하지 못한다. Jongsang Suh(7)는 자율주행차의 차선변경 판단을 위한 확률적 모델 예측 제어(Stochastic Model Predictive Control, SMPC) 기법을 제안했다. 차선변경 판단을 위한 safe driving envelope를 차량의 상태변수와 주변 차량의 상태에 대한 부등식 형태의 구속조건으로 제시했다. 이를 확률 분포를 가진 chance constraints로 취급하고 constraint tightening 기법으로 해결했다.
본 연구는 정지차량을 대상으로 안전성이 보장되고 승차감이 향상된 자율자동차의 제동거동을 제안한다. Constant time headway rule을 적용하여 선행 차량에 대해 ACC를 하던 기존 연구와 달리 수동 주행 데이터와 유사한 새로운 차간거리 및 속도 기준 모델을 제시하고 이를 추종한다. 오직 정지차량을 대상으로 작동하는 제동 모드이며 이 모드의 작동조건을 위한 판단 알고리즘과 기준 모델을 추종하는 제어 알고리즘을 제안한다. 안전성을 위해 차량이 제동 거동 중 최소 차간거리를 초과하지 않는 조건이 구속조건으로 작용한다. 선행 차량에 대한 측정 거리의 불확실성이 가우스 확률분포로 가정되며 이 chance constraint를 SMPC에 적용한다.
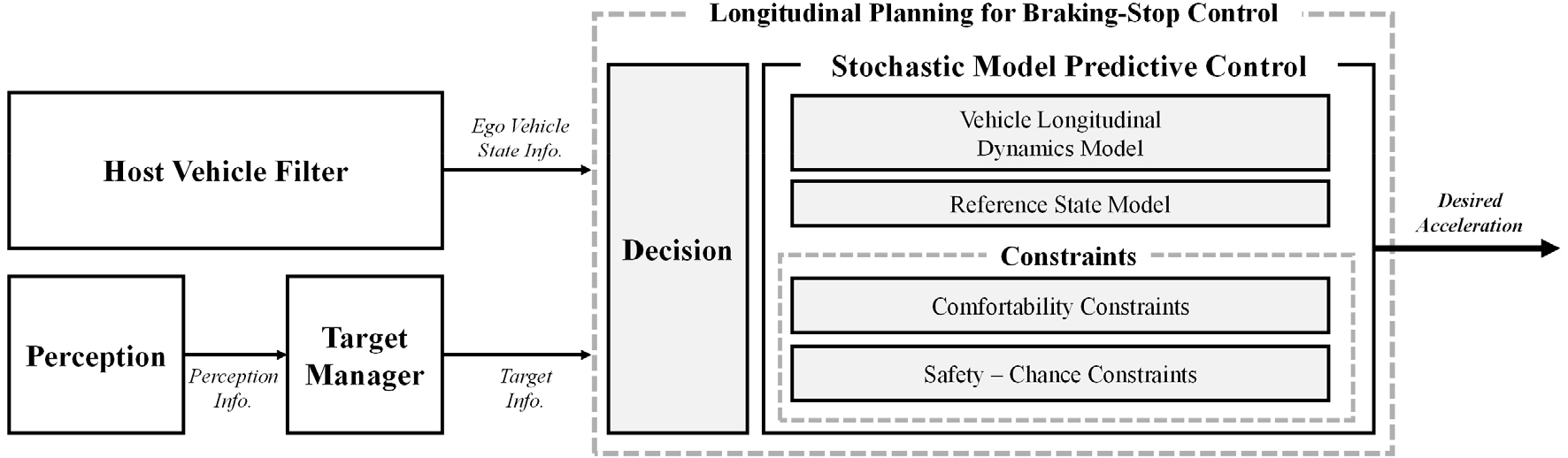
Fig. 1은 자율주행 차량의 감속-정지 모드를 위한 알고리즘 구조를 보여준다. 인지 모듈에서 측정한 정보로부터 target manager module이 선행차량의 속도와 거리를 측정한다. Host vehicle filter에서 자차량의 속도를 추정한다. 판단 모듈에서는 앞서 추정한 데이터로부터 감속-정지 모드가 작동되어야 하는 조건을 판단하고 공칭 가속도(nominal acceleration)을 계산한다. 감속-정지 모드가 작동되면 제어 모듈에서는 선행차량까지의 거리와 자차량의 속도로부터 기준모델을 구성하고 제한 조건들과 함께 모델 예측 제어에 반영한다. 제시된 모델의 안전성과 승차감 검증은 시뮬레이션으로 진행된다.
2. 수동주행 데이터
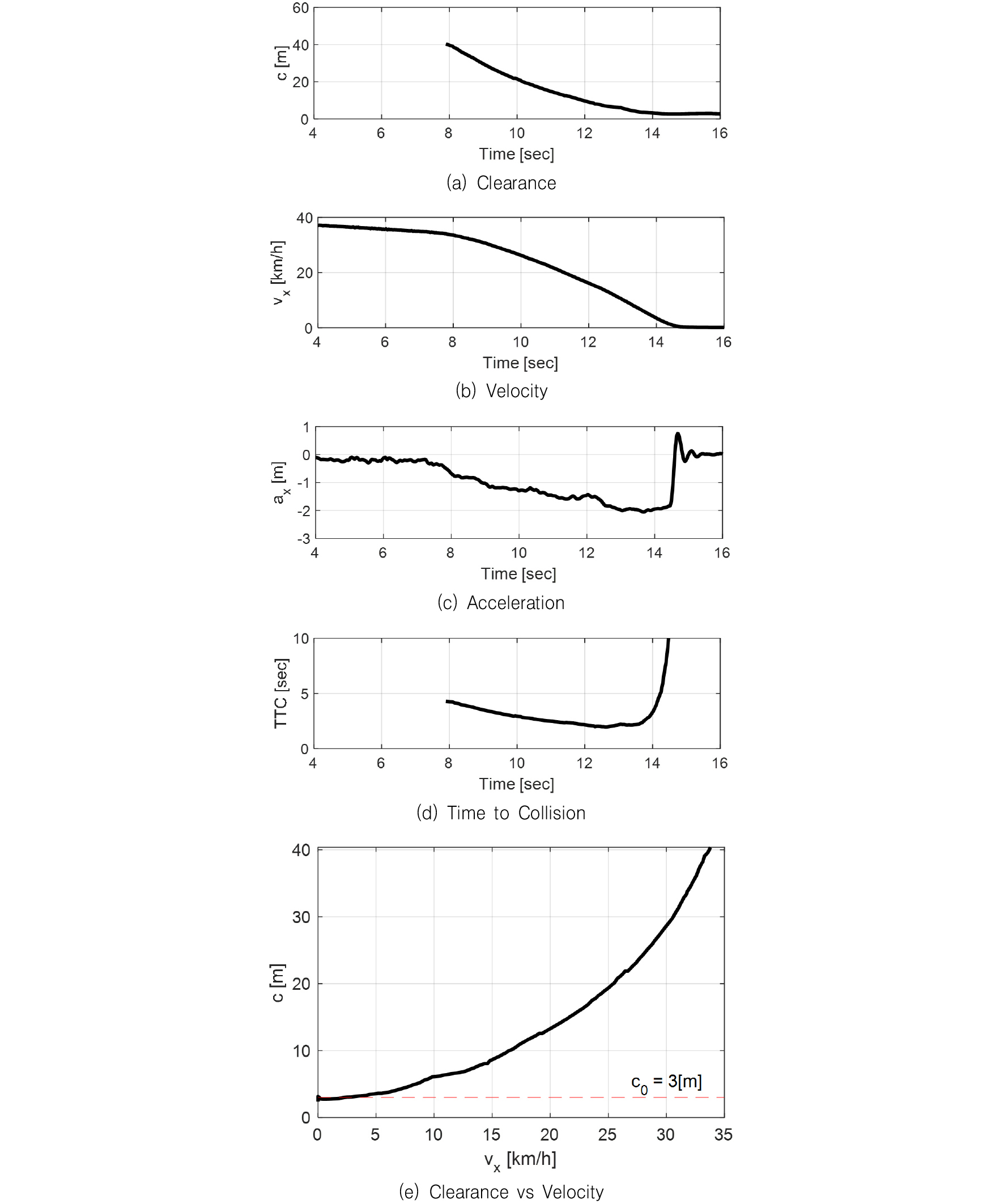
Fig. 2는 정지 차량을 대상으로 감속하는 상황에서 차량의 거동 특성을 보여준다. 차량의 초기 속도는 약 36km/h이며 LiDAR를 장착한 일반적인 자율주행차의 인지거리인 40m부터 타겟을 감지했다고 가정하고 감속을 시작한 상황이다. 운전자는 초반에 해당 차간거리와 속도에서 필요한 제동 입력을 경험 바탕으로 일정하게 가한다. 차간 거리가 가까워지면서 부족한 제동 입력을 더 가해주어 최소 차간거리 3m부근에서 정차한다. 본 연구에서 모사할 차량의 제동 거동 특성은 수동주행의 가속도 프로파일(Fig. 2(c))이다.
3. 판단 알고리즘
Fig. 3은 정지 차량 대상 감속-정지 모드(Braking-Stop Control Mode, BSC Mode)의 판단 알고리즘을 보여준다. 선행차량의 속도 vp(k)가 1km/h이하 일 때 정지차량으로 판단한다. 자율주행 시스템의 루프가 k번째 단계를 진행할 때, BSC 모드가 작동되기 위한 기준 거리는 식 (1)과 같다.
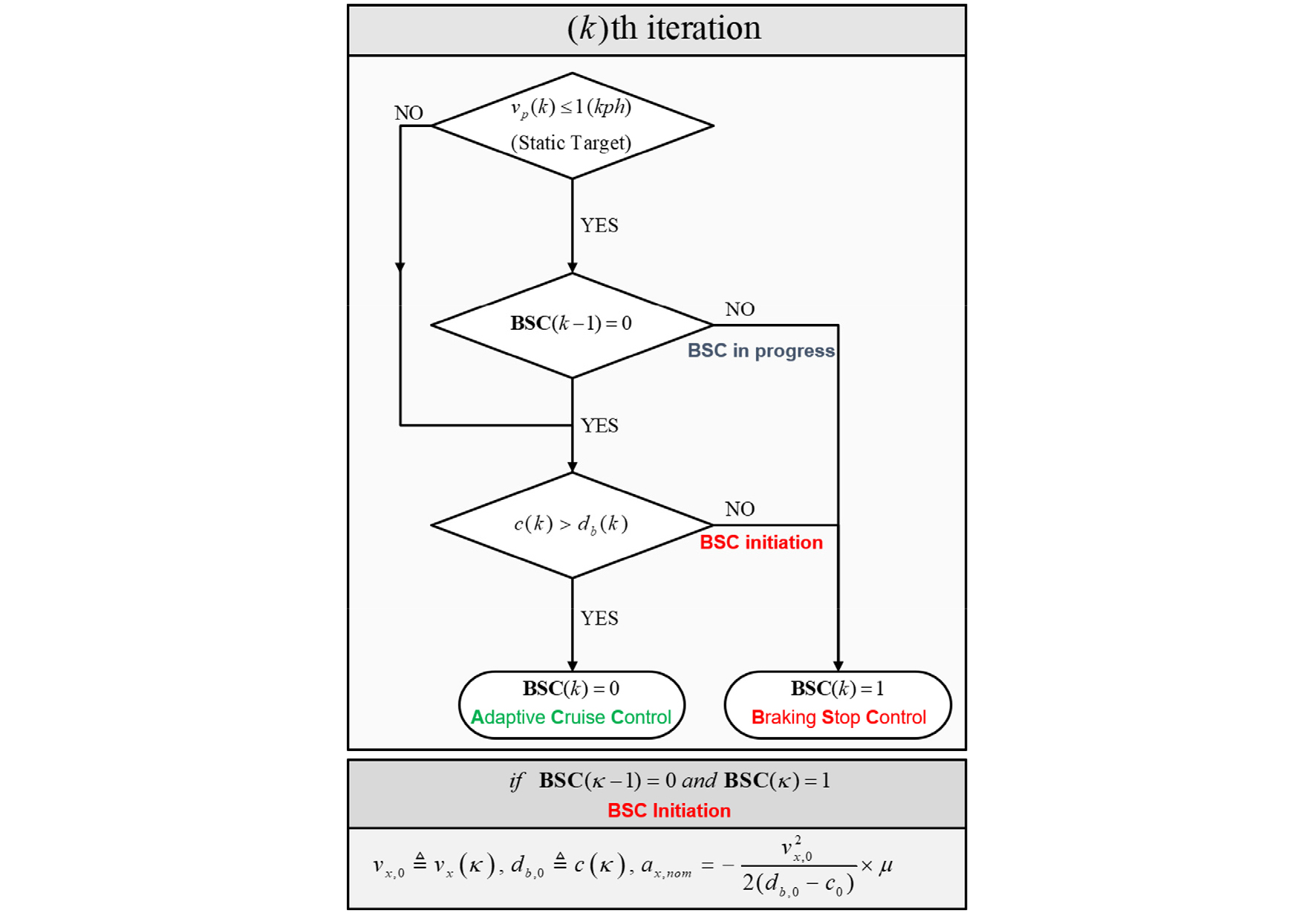
where, aset = -1m/s2, c0=3m
여기서 db(k)는 BSC모드 작동 기준 거리, vx(k)는 자차량 종방향 속도, c(k)는 차간거리, aset는 설정 가속도, c0는 최소 차간거리이다. 현재 차간 거리에서 aset = -1m/s2로 일정하게 감속했을 때 정지 가능한지를 판단 기준으로 두었다. BSC 모드가 이미 정상 작동된 경우에도 해제되는 조건, c(k)>db(k)을 만족할 수 있기에 직전 스텝에서 모드가 작동됐었으면 모드를 유지시킨다. BSC모드가 처음으로 작동할 때 계산되는 공칭 가속도는 식 (2)와 같다.
여기서 ax,nom는 공칭 가속도, db,0는 BSC모드가 작동될 때 초기 차간거리, vx,0는 초기속도, μ=1.1 액추에이터의 지연을 고려한 상수이다.
4. 차량 종방향 모델링 및 제어 알고리즘
4.1. 차량 동역학적 종방향 모델
종방향 액추에이터 모델은 목표 가속도와 실제 가속도의 1차 딜레이 관계를 가정하여 식 (3)과 같이 표현한다.
여기서 τ는 시상수(time constant)이다. 차량의 종방향 제어기 설계를 위해 차량 기준 국소 좌표계(local coordinate)에 대한 종방향 위치 px(k|t), 속도 vx(k|t), 가속도 ax(k|t)를 상태변수 xlon(k|t)=[px(k|t) vx(k|t) ax(k|t)]T로 사용하고 목표 가속도 ax,des를 제어입력 ulon(k|t)=ax,des으로 사용한다. 여기서 (k|t)표현은 어떤 시간 t에 모델 예측 제어기에서 고려하는 k번째 스텝을 의미한다.
본 연구에서 적용할 종방향 모델을 이산시간 상태공간 방정식으로 표현하면 식 (4)와 같다. 여기서 Δt=0.1sec로 제어기에 적용될 이산 시스템의 스텝 간격이다.
where,
4.2. 모델 예측 제어 알고리즘
모델 예측 제어에 적용되는 비용함수(cost function)은 식 (5)와 같다.
where,
xlonref(k|t)=[pxref(k|t) vxref(k|t) axref(k|t)]T은 상태변수가 추종하고자 하는 기준상태(reference state)이다. 모델 예측 제어기는 상태변수와 기준상태의 차를 0으로 최소화하는 레귤레이터 시스템이다. Np는 제어기가 예측하고자 하는 horizon의 스텝 개수이다.
4.3. 기준 상태
상태변수가 레귤레이터 시스템에서 추종하고자 하는 기준상태(reference state)의 k=0 스텝은 식 (6)과 같다.
where,
여기서 는 시간 t일 때 선행차까지 거리와 자차량의 속도 추정치이다. cref(t)는 추정된 속도 를 가진 자차량이 ax,nom의 일정한 가속도로 감속해서 최소 차간거리 c0를 남기고 정차할 수 있는 기준 차간거리이다. 기준상태는 ax,nom의 일정한 가속도로 감속한다고 가정하고 Euler method를 이용하여 수치적 적분으로 식 (7)과 같이 계산하였다.
where, k=1,…,Np
4.4. 제한 조건
차량의 종방향 모델을 위한 등식 제한 조건은 식 (4)와 같다. 승차감을 위한 부등식 제한 조건은 식 (8)와 같다.
여기서 ax,min, ax,max, jx,min, jx,max는 각각 최소 가속도, 최대 가속도, 최소 가가속도, 최대 가가속도다. 차량이 목표 지점에 안전하게 정차하기 위한 구속조건으로 남은 차간거리가 최소 차간거리 c0=3m보다 길어야 한다는 조건이 필요하다. 자율주행차가 측정하는 차간거리는 불확실성을 포함하고 있기에 이에 대한 구속조건을 식 (9)와 같이 확률적으로 표현할 수 있다.
where, G=[1 0 0], H=-(pxTV(k|t)-c0) 0 ≤ ε ≤ 0.5
여기서 ε는 위험도 파라미터로 차량이 최소 차간 거리를 침범할 확률이다. Chance constraint를 tightened parameter γ(k|t)로 정의하면 식 (10)과 같고 이를 정리하여 식 (11)과 같은 부등식 제한 조건으로 표현할 수 있다.
선행 차량 거리는 의 정규분포의 불확실성을 가진다고 가정한다. Σ(k|t)는 선행차량의 위치 불확실성의 공분산이다. erf-1(·)는 가우스 오차함수의 역함수(inverse error function)이다.
5. 시뮬레이션
5.1. 시뮬레이션 설계
시뮬레이션의 설계 변수와 매개변수는 Table 1과 같다. 시뮬레이션에서 묘사할 차량 종방향 동역학적 액추에이터 특성은 식 (12)와 같다.
Table 1.
Design specification of simulation
where, τ=0.3sec, Td=0.1sec
여기서 ax,act, ax,cmd는 각각 실제 가속도와 입력된 명령 가속도이다. 동역학적 액추에이터 특성은 1차 지연과 데드-타임 지연을 가정하였다.
5.2. 시뮬레이션 결과
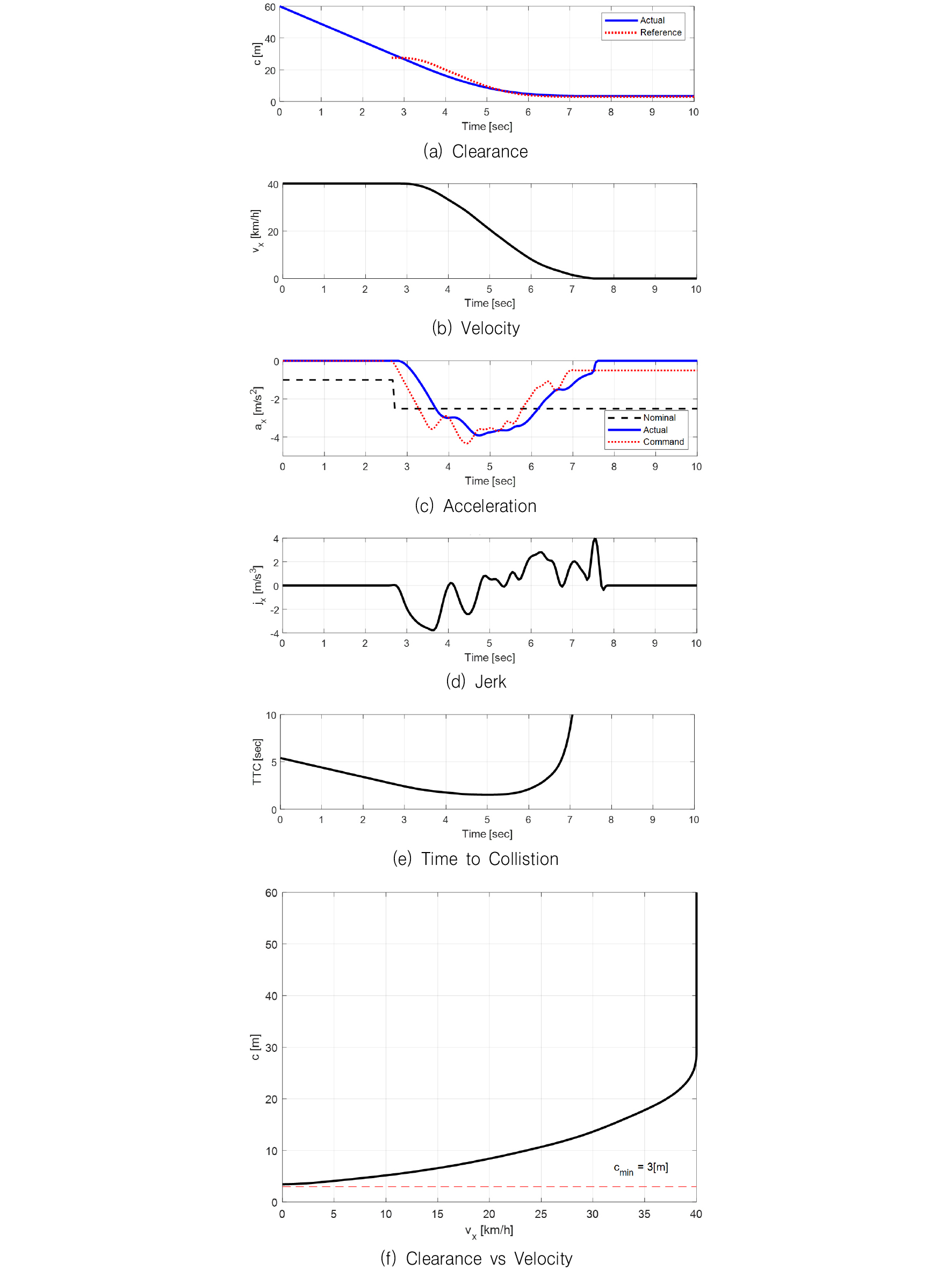
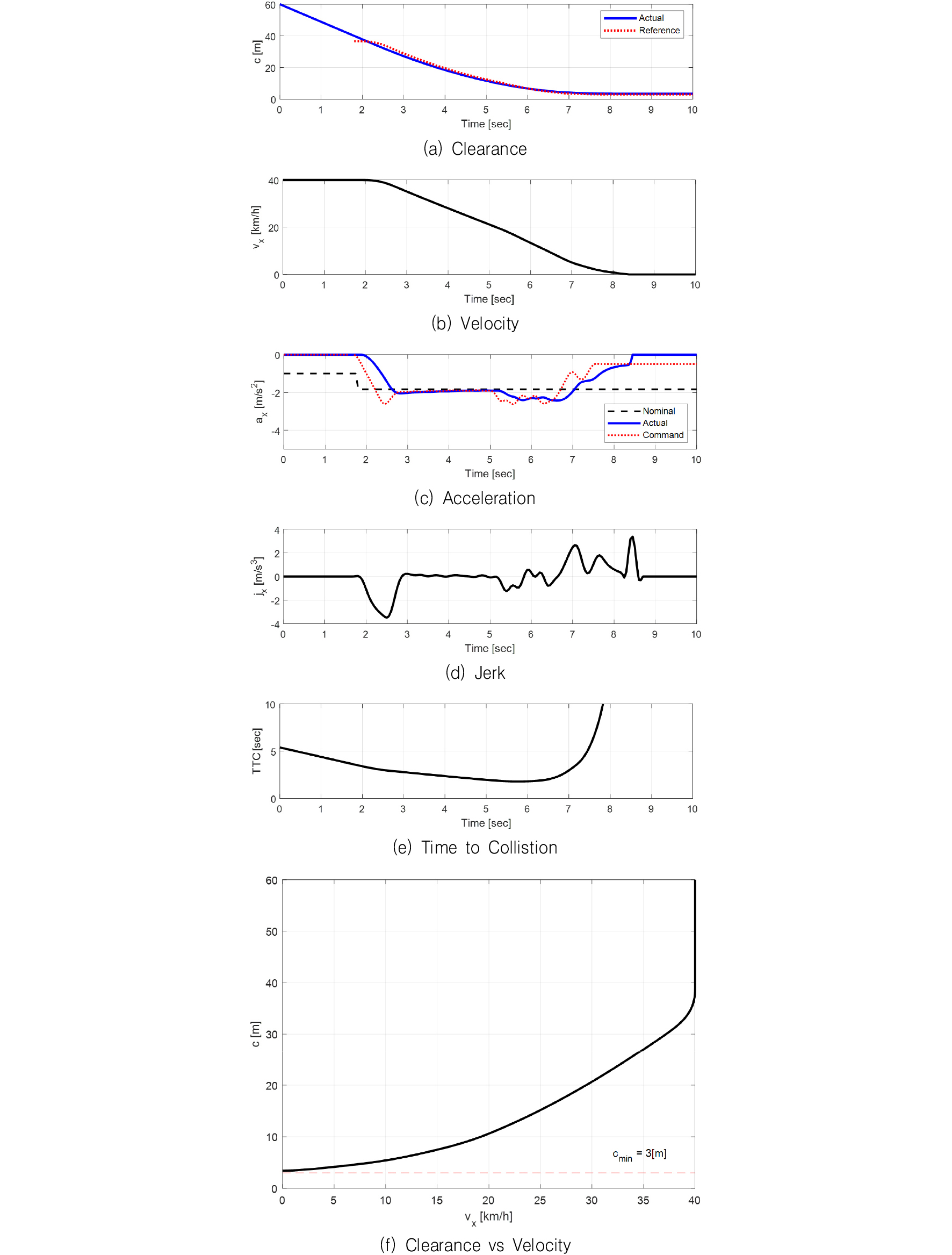
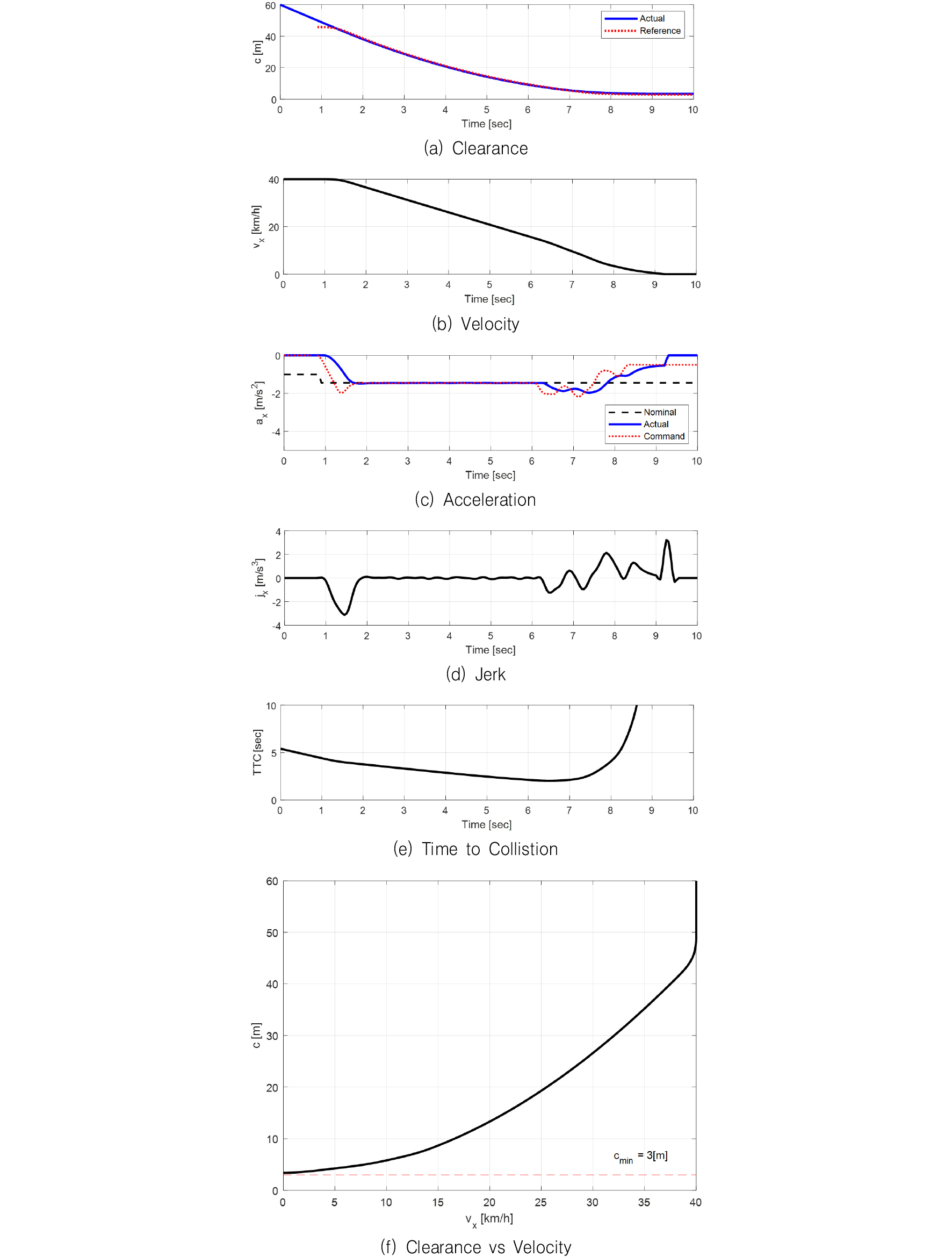
Figs. 4, 5, 6은 Table 1의 파라미터 및 변수 값을 적용시킨 정지 차량 대상 감속-정지 시뮬레이션의 결과이다. Tightened parameter를 식 (10)에 의해 계산하면 γ(k|t)=0.47m이다. 인지 거리가 30m, 40m, 그리고 50m인 실험(Figs. 4, 5, 6)에서 최종적으로 정지했을 때 차간 거리가 각각 3.5m, 3.4m, 3.4m로 최소 차간거리보다 멀리 정차하였다. 가속도 프로파일을 보면 인지거리가 짧았던 Fig. 4를 제외하고는 일정한 공칭가속도를 추종하여 앞서 제안했던 사람과 같은 감속 거동이 나타났다. 차간거리가 가까워지면 공칭가속도보다 작은 가속도를 사용하여 최소 차간거리보다 멀리 정차하는 구속조건을 만족시켰다. 가속도와 가가속도도 구속조건을 만족시켜 승차감을 개선하였다.