

1. 서 론
2. V2X 통신기술 동향
3. V2X 통신 혼잡 환경 원인과 현상
4. V2X 통신 혼잡제어 기능 평가
4.1. 시험 목표 및 요구사항
4.2. V2X 통신 혼잡제어 평가 환경 및 평가시스템
5. V2X 통신 혼잡제어 평가 항목의 평가 방법
5.1. TP-BSM-SVCC 시험
5.2. TP-BSM-MVCC-EVNT 시험
5.3. TP-BSM-MVCC-DYN 시험
6. 결 론
1. 서 론
V2X 통신은 차량-사물 간 통신(Vehicle-to-Everything)을 뜻하며, 차량이 주변의 다양한 요소와 정보를 주고받는 기술이다.
이는 자율주행 시대의 필수적인 핵심 기술로 부상하고 있으며, 교통사고 예방, 교통 흐름 최적화, 그리고 자율주행차의 안전성 향상에 중요한 역할을 한다.
V2X 통신은 차량에 탑재된 센서(카메라, 레이더, 라이다 등)의 한계를 보완하여 자율주행의 안전성을 극대화하는 데 필수적이다. 차량 내 센서는 시야에 들어오는 범위 내에서만 정보를 파악할 수 있지만, V2X 통신은 보이지 않는 곳의 위험 상황까지 미리 감지하고 공유할 수 있다. 예를 들어, 교차로에서 접근하는 다른 차량, 보행자, 또는 갑작스러운 도로의 장애물 정보를 실시간으로 수신하여 사고를 예방할 수 있다.
신호등, 도로 인프라와 연동하여 정체를 최소화하고 최적의 경로를 안내하여 운전자의 편의를 높이고 연료 효율성을 향상하는 등 교통 효율성을 증대하며, 자율주행 레벨 4 이상의 완전 자율주행을 구현하기 위해서는 차량이 주변 환경을 정확하게 인지하고 반응이 필요하며, V2X 통신은 이러한 목표를 달성하기 위한 핵심 기술이다.
우리나라는 2014년 7월부터 국토교통부에서 V2X 통신 기술 중의 하나인 WAVE(Wireless Access in Vehicular Environments) 기술을 기반으로 C-ITS(차세대 지능형교통체계, Cooperative-Intelligent Transport Systems) 확대 조성을 위한 기술·서비스 개발 및 검증, 인프라 구축, 표준·인증 체계 마련, 법제도 정비 등을 목표로 C-ITS 시범 사업을 추진하였다.
이를 기반으로 각 지자체에서도 교통 혼잡 등으로 인한 교통 환경 악화, 기상 악화로 인한 교통사고 발생 감소 기반 조성, 스마트 도로 협력 인프라 구축, 자율주행 지원하기 위해 C-ITS 실증사업을 추진한 바 있다.
C-ITS 실증사업을 통해 다양한 안전 서비스들이 개발되고 V2X 통신 기술의 안전성이 검증되고 있으며 국토교통부는 2022년 9월 모빌리티 혁신 로드맵 발표를 통해 2027년까지 고속도로를 포함한 도심 및 주요 도로 3만㎞에, 2030년까지는 11만㎞에 달하는 전국 모든 도로에 C-ITS 인프라를 구축할 계획이며, 전체 차량의 70%인 1,600만 대에 V2X 단말기를 장착할 예정이다.
세계 주요 국가(유럽, 중국, 일본)에서는 V2X 기술을 활용한 사고 예방 안전성에 주목하여 자동차안전도평가(NCAP, New Car Assessment Program) 로드맵을 수립하여 V2X 기술에 대해 NCAP 평가 항목으로 도입하는 등 V2X 통신 안전성 기준을 마련하고 있다.
특히 유럽은 C-ITS와 관련된 V2X 서비스가 차량 안전도를 향상시킬 수 있는 안전 기술로써의 중요성을 인지하고 NCAP 평가 항목으로 V2X가 포함된 ‘EURO NCAP Roadmap 2025’를 2017년에 Fig. 1과 같이 발표하였다.

V2X와 관련된 국내 C-ITS 구축 상황과 국제적인 흐름에 발맞춰 우리나라도 V2X 통신 기술 관련하여 제작사의 기술 개발 및 V2X 통신장치 장착을 유도하고 제작차의 안전도 향상을 위한 제도화 방안으로 국토교통부는 2025년부터 국내 자동차안전도평가(KNCAP) 평가 항목으로 V2X 통신장치 도입을 결정하였다.
국토교통부 산하 한국교통안전공단은 2025년부터 V2X 통신장치의 서류 평가를 통해 가산점 1점을 제공하고 있으며, 또한 자율주행기술개발혁신사업(‘21~‘26년) 참여를 통해 국제기준(UNECE/WP29)에 부합하는 자동차 V2X 통신성능 안전성 평가기술 관련 연구를 진행하고 있다.
본 연구에서는 V2X 기술이 실제 도로에 적용되어, 수많은 차량과 인프라가 동시에 통신하면서 발생할 수 있는 통신 혼잡(Congestion)과 V2X 통신 성능 저하 환경에서 자동차에 장착된 V2X 통신장치의 통신 신뢰성과 안전성 평가를 위한 혼잡상황 재현, 혼잡 제어 기술, 평가 항목, 평가 환경 구성 및 평가 방법 등 V2X 통신 혼잡 환경에서의 실차 기반 V2X 통신성능 평가기술 개발에 관한 연구를 진행하였다.
V2X 통신 혼잡 환경에서 발생할 수 있는 통신 채널 포화 및 충돌, 데이터 전송 지연(Latency) 및 손실(Packet Loss), 성능 저하로부터 자동차 V2X 통신장치의 통신 신뢰성과 안전성을 보장하기 위해 혼잡 제어 및 성능평가 기술은 매우 중요하며, 실제 도로 환경에서 V2X 통신장치가 얼마나 안정적으로 작동하는지를 검증하는 데 도움을 준다.
2. V2X 통신기술 동향
현재 전 세계적으로 V2X 통신기술은 IEEE 802.11p 표준 그룹에서 개발한 무선랜 기반의 WAVE 통신기술과 3GPP 표준 그룹에서 개발한 셀룰러 통신 기반의 C-V2X(Cellular-V2X) 통신기술이 공존하고 있는 상황이다. 두 통신방식은 동일한 서비스 애플리케이션을 위해 사용되면서도 서로 호환되지 않아 둘 중 하나의 통신방식을 선택해야 하는 상황이며, 이를 위해 각 국가별로 V2X 통신기술 선택을 위한 다양한 논의와 실험이 진행되고 있다.
Table 1.
V2X communication technology feature comparison
| 항목 | WAVE | C-V2X |
| 표준 | IEEE 802.11p | 3GPP Rel. 14 이상 |
| 표준화 시점 | 2010 | 2016 |
| 통신 기술 | 무선랜(DSRC) | 셀룰러(LTE-V2X, 5G-NR) |
| 통신 용량 | 낮음(상대적) | 높음(상대적) |
| 실증(신뢰성확보) | ○ | × |
국내에서는 2014년부터 정부·지자체를 통해 다양한 지역에서 WAVE 통신기술 기반 C-ITS 실증사업을 진행하였으나, 2023년 12월 ‘C-ITS 단일 통신방식 결정 전문가 위원회’가 차세대 지능형교통체계(C-ITS)를 위한 통신방식으로 LTE-V2X를 최종적으로 결정함으로써, 현재는 해당 기술에 맞게 기술기준 개정 및 실증 테스트를 진행하고 있으며 중요도가 높은 도로부터 단계적으로 C-ITS 인프라를 구축해 나갈 계획이다.
3. V2X 통신 혼잡 환경 원인과 현상
V2X 통신 혼잡(Congestion) 환경은 일반적으로 여러 대의 차량이나 도로 인프라가 한정된 통신 채널을 통해 동시에 데이터를 주고받으려 할 때 발생하는 상황을 의미한다. 하지만 V2X 통신 혼잡 환경은 단순히 차량이 많아져서 통신이 복잡해지는 것을 넘어, 여러 기술적 요인이 복합적으로 작용하는 현상이다. 이를 더 상세히 설명하면 Table 2와 같다.
Table 2.
Technical causes of V2X communication congestion
통신 혼잡은 채널 포화 및 충돌(Collisions), 데이터 전송 지연(Latency) 및 손실(Packet Loss), 성능 저하를 일으키며, Table 3과 같은 핵심 V2X 통신 성능 지표들을 직접적으로 악화시킨다.
Table 3.
The impact of V2X communication congestion on communication performance
이러한 문제들을 해결하기 위해 분산 혼잡 제어(Distributed Congestion Control, DCC)와 같은 알고리즘이 개발되고 있다. 이 기술은 차량이 주변 혼잡도를 스스로 파악하고, 전송 주기를 조절하거나 전송 전력을 낮추는 등의 방식으로 통신량을 줄여 성능을 유지하도록 돕고 있다. 따라서 이러한 통신 혼잡 환경에서 V2X 통신의 신뢰성과 안전성을 보장하기 위해 혼잡 제어 및 성능평가 기술은 매우 중요하다.
4. V2X 통신 혼잡제어 기능 평가
4.1. 시험 목표 및 요구사항
시험의 목표는 BSM 혼잡제어 시험을 통해 차량에 장착된 V2X 통신장치에 구현된 BSM 혼잡제어 기능이 표준(SAE J3161/1-2022)에 정의된 바에 따라 정상적으로 동작하는지를 검증하는 것을 목적으로 한다.
혼잡 제어 기능을 확인하기 위해 관련된 평가 환경 및 절차 정의가 필요하며, 이를 위해서 V2X 통신 혼잡도 관련 SAE J3161/1/1A, 국내 단체 표준 및 상용 솔루션 분석을 통해 평가 항목, 평가 방법, 평가 절차, 평가시스템 등의 요구사항을 도출하였다.
주요 검증 항목의 정의에 따른 시험 요구사항은 Table 4와 같으며, 이는 SAE J3161/1A-2022 표준에 정의된 혼잡제어 관련 시험의 내용을 따른다.
Table 4.
BSM congestion control test requirements
BSM 혼잡제어 시험의 대상이 되는 DUT(OBU) 및 시험시스템(TS)에 구현되는 BSM 관련 기본기능과 혼잡제어 기능은 SAE J3161/1-2022 표준에 정의된 요구사항을 준수해야 하며, BSM 혼잡제어 시험을 시행하기 위해 Table 5와 같은 시험 환경이 요구된다.
Table 5.
BSM congestion control test environment requirements
도출된 요구사항을 V2X 통신 혼잡도 평가를 위한 평가 장비 구성 및 평가 환경 구축에 반영하였으며, 구축된 혼잡상황 평가시스템을 이용하여 V2X 통신 혼잡상황에서 차량에 장착된 V2X 통신장치의 통신 성능 및 혼잡 제어 기능의 평가를 진행하였다.
4.2. V2X 통신 혼잡제어 평가 환경 및 평가시스템
V2X 통신 혼잡제어 평가를 위해 3개의 평가 항목을 도출하였으며, 해당 항목을 평가하기 위한 평가 환경은 REQ-BSM-SVCC와 REQ-BSM-MVCC-EVNT는 2차선 이상의 직선로 환경에서 실차 평가를 수행할 수 있어야 하며, 길이가 최소 300 m 이상 직선로 환경이 필요하지만, 가속 및 감속 구간을 고려하면 최소 500 m 이상의 직선로가 필요하다. 또한 REQ-BSM-MVCC-DYN는 반경 80 m 이상의 원형 트랙 환경이 필요하다.
Table 6.
Defining the evaluation environment by evaluation item
| 혼잡제어 평가 항목 | 평가 환경 |
|
REQ-BSM-SVCC (DC-SVCC) | 직선로, 종합시험로 등 |
|
REQ-BSM-MVCC-EVNT (DC-MVCC-EVNT) | |
|
REQ-BSM-MVCC-DYN (DC-MVCC-DYN) | 선회시험장, 도로안전시설 평가시험장 등 |

한국교통안전공단 자동차안전연구원에는 주행시험장 내에 2차선 이상의 직선로(약 1.6 km), 종합시험로, 선회시험장, 도로안전시설 평가시험장이 구축되어 있어 3개의 평가 항목에 대한 실차 평가가 진행이 가능하다.
V2X 통신 혼잡제어 시험을 위해 사용되는 기준 평가시스템의 주요 기능 및 요구사항은 J3161/1/1A 표준을 분석하여 도출하였으며 Fig. 3 및 Table 7과 같다.
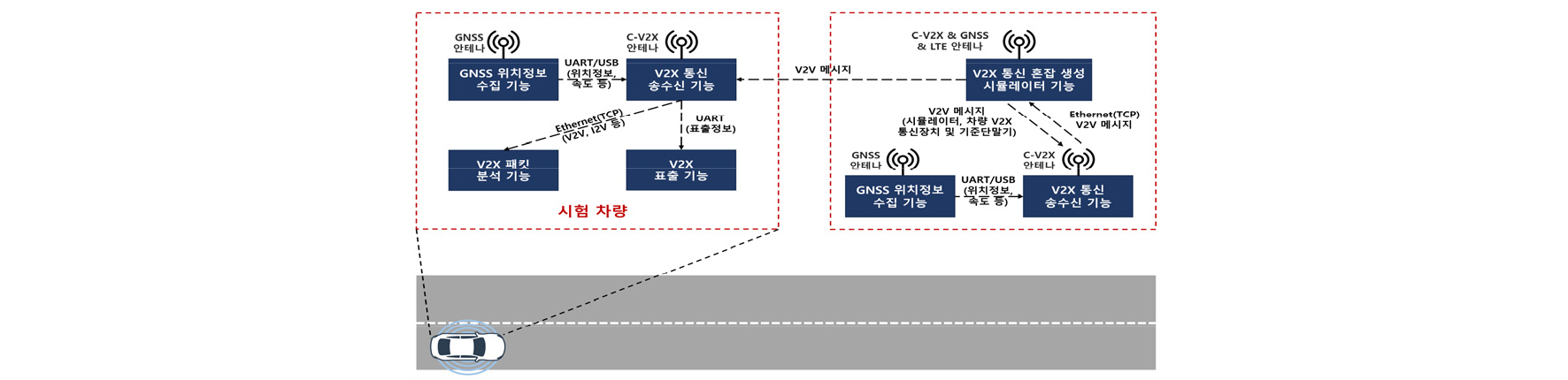
Table 7.
Requirements of the standard evaluation system
기준 평가 장비 요구사항을 반영하여 V2X 통신 혼잡상황 시뮬레이션을 위한 평가시스템은 Fig. 4와 같이 V2X 통신 혼잡 생성 시뮬레이터, C-V2X 무선통신 계측기, 신호 증폭기와 C-V2X 시그널 안테나로 구성한다. V2X 통신 혼잡 생성 시뮬레이터는 가상 차량 대수에 따른 BSM 메시지를 생성하여 V2X 통신 혼잡상황을 시뮬레이션하며 PER 값을 제어한다.

Fig. 5는 V2X 통신 혼잡상황 시뮬레이션 시스템을 포함한 주행시험장에서의 V2X 통신 혼잡제어 성능 평가시스템 구성을 보여준다.
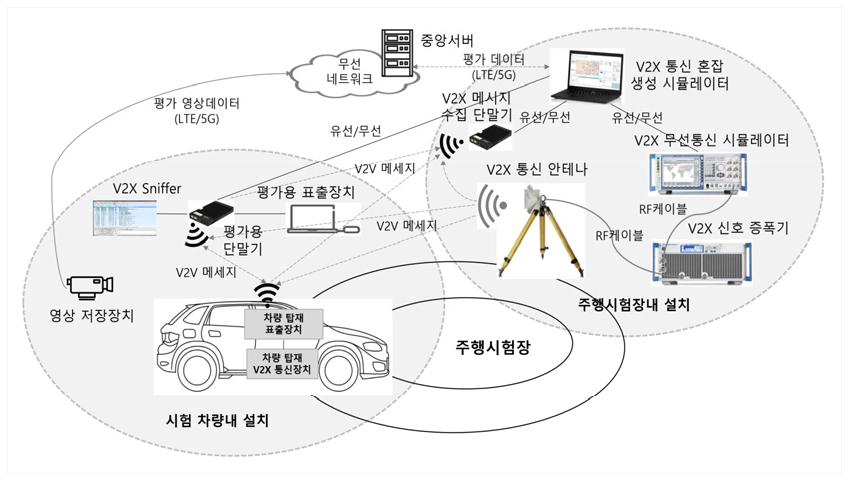
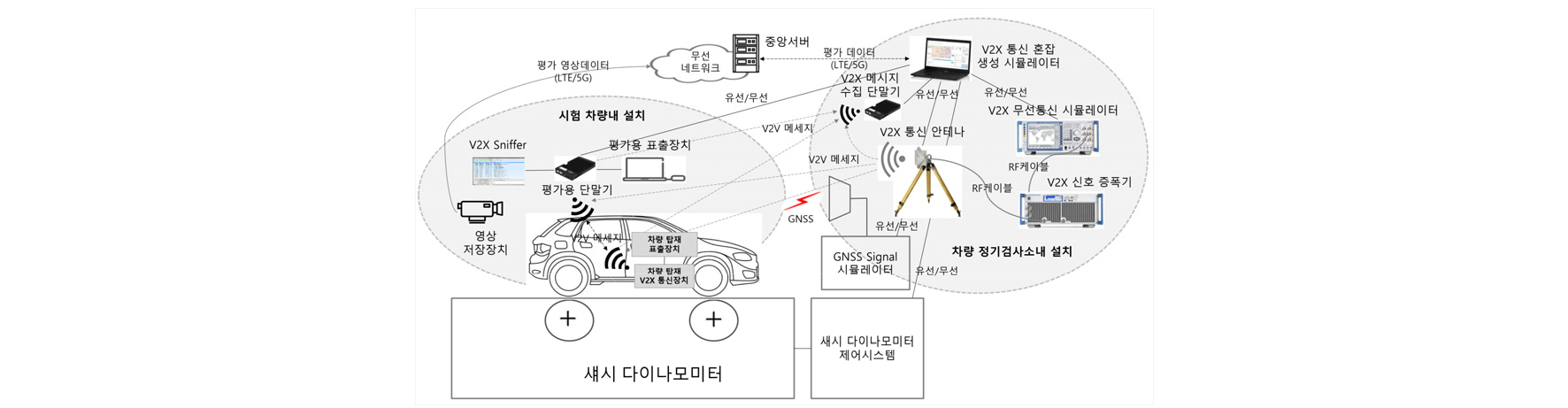
Fig. 6은 차량 정기검사소의 V2X 통신 혼잡제어 성능 평가시스템 구성을 보여준다. 차량 정기검사소에서 평가는 실내에서 제한된 공간 아래에서 수행되므로 가상의 주행 환경 및 GNSS 위치값을 시뮬레이션할 수 있도록 한다.
5. V2X 통신 혼잡제어 평가 항목의 평가 방법
V2X 통신 혼잡제어 평가 항목의 평가 방법은 SAE J3161/1A-2022 표준에 정의된 관련 시험 절차를 준용한다.
5.1. TP-BSM-SVCC 시험
본 시험은 Table 4의 REQ-BSM-SVCC 요구사항에 대한 시험으로서, SAE J3161/1A-2022 표준에 정의된 DC-SVCC 시험 절차를 준용하며, 시험 목적은 DUT가 정지된 상태에서 혼잡도에 따라 BSM 전송 주기를 적절하게 변경하는지 확인한다.
본 시험은 총 5개의 테스트 케이스에 대해 수행되며, 각 테스트 케이스 별로 Table 8과 같이 다른 차량 혼잡도 및 기댓값이 적용된다.
Table 8.
Target congestion and expected values by test case. Adapted from [1] Table 35
| 테스트 케이스 |
목표 혼잡도 (TS 전송 BSM) |
기댓값 (DUT의 BSM 전송 주기) | |
| 목표 PER |
목표 차량 밀도(N) (vPERRange 내 차량 대수) |
평균 전송 주기 (+15 msec 오차 허용) | |
| 1 | 0 | 0 | 100 |
| 2 | 0 | 25 | 100 |
| 3 | 0 | 50 | 200 |
| 4 | 0 | 100 | 400 |
| 5 | 0 | ≥150 | 600 |
TP-BSM-SVCC 시험 절차는 다음과 같으며, 아래 T1 및 T2 시간은 TS 구현에 따라 다르게 적용된다.
•(단계 1) TS는 DUT가 전송하는 BSM을 T1 시간 동안 수신하여 DUT의 BSM 전송 주기가 100 msec를 만족하는지 확인한다.
•(단계 2) TS는 Table 8의 테스트 케이스 #1의 목표 혼잡도(차량 밀도)에 맞춰 BSM을 전송한다.
•(단계 3) TS가 전송하는 BSM에 의해 안정적인 목표 혼잡도에 도달하고, 이에 따른 DUT의 혼잡제어 동작이 적용될 때까지의 충분한 시간(T2) 동안 기다린다.
•(단계 4) TS는 DUT가 전송하는 BSM을 T1 시간 동안 수신한다.
•(단계 5) TS는 T1 시간 동안 DUT로부터 수신된 BSM의 평균 주기가 Table 8의 테스트 케이스 #1의 기댓값과 동일한지를 확인한다.
•(단계 6) Table 8의 테스트 케이스 #2~#5에 대해 2~5단계 절차를 반복한다.
5.2. TP-BSM-MVCC-EVNT 시험
본 시험은 Table 4의 REQ-BSM-MVCC-EVNT 요구사항에 대한 시험으로서, SAE J3161/1A-2022 표준에 정의된 DC-MVCC-EVNT 시험 절차를 준용하며, 시험 목적은 BSM 혼잡 구간 내에 위치한 DUT가 BSM 전송 주기를 증가시킨 상태에서, 이동 중 급감속 이벤트가 발생하면 BSM 전송 주기를 적절하게 감소시키는지 확인한다.
본 시험은 시험 차량이 직선 경로에서 60 km±5 km/h의 속도로 최소 15초 동안 주행한 후 급감속을 수행하므로, 최소 300 m 이상의 길이를 갖는 직선 도로에서 수행된다.
본 시험은 1개의 테스트 케이스에 대해 3회 반복 수행되며, Table 9의 혼잡도 및 기댓값이 적용된다.
Table 9.
Target congestion and expected value per test case. Adapted from [1] Table 36
TP-BSM-MVCC-EVNT 시험 절차는 다음과 같으며, 아래 T1 및 T2 시간은 TS 구현에 따라 다르게 적용된다.
•(단계 1) TS는 DUT가 전송하는 BSM을 T1 시간 동안 수신하여 BSM이 수신되는 주기가 100 msec를 만족하는지 확인한다.
•(단계 2) TS는 Table 9의 테스트 케이스 #1의 목표 혼잡도(차량 밀도)에 맞춰 BSM을 전송한다.
•(단계 3) TS가 전송하는 BSM에 의해 안정적인 목표 혼잡도에 도달하고, 이에 따른 DUT의 혼잡제어 동작이 적용될 때까지의 충분한 시간(T2) 동안 기다린다.
•(단계 4) TS는 DUT가 전송하는 BSM을 T1 시간 동안 수신한다.
•(단계 5) TS는 T1 시간 동안 DUT로부터 수신된 BSM의 평균 주기가 Table 9의 테스트 케이스 #1의 기댓값(1단계)과 동일한지 확인한다.
•(단계 6) DUT는 직선 경로에서 60 km/h ± 5 km/h의 속도로 최소 15초 동안 주행 후 SAE J3161/1에 따른 급감속을 수행한다.
•(단계 7) TS는 6단계 실행 중 DUT로부터 수신된 BSM의 평균 주기가 Table 9의 테스트 케이스 #1의 기댓값(1~3단계)과 동일한지 확인한다.
•(단계 8) Table 9의 테스트 케이스 #1에 대해 2~7단계 절차를 2회 반복한다.
5.3. TP-BSM-MVCC-DYN 시험
본 시험은 Table 4의 REQ-BSM-MVCC-DYN 요구사항에 대한 시험으로서, SAE J3161/1A-2022 표준에 정의된 DC-MVCC-DYN 시험 절차를 준용하며, 시험 목적은 BSM 혼잡 구간 내에 위치한 DUT가 BSM 전송 주기를 증가시킨 상태에서, DUT의 이동 또는 PER의 증가에 따라 DUT가 BSM 전송 주기를 적절하게 감소시키는지 확인한다.
본 시험은 시험 차량이 55 km/h 속도로 반경 80 m 이상의 원형 트랙을 90초 동안 주행하므로, 반경 80 m 이상의 원형 곡선 도로에서 수행된다.
본 시험은 총 2개의 테스트 케이스에 대해 수행되며, 각 테스트 케이스 별로 Table 10과 같이 다른 차량 혼잡도 및 기댓값이 적용된다.
Table 10.
Target congestion and expected value per test case. Adapted from [1] Table 37
TP-BSM-MVCC-DYN 시험 절차는 다음과 같으며, 아래 T1 및 T2 시간은 TS 구현에 따라 다르게 적용된다.
•(단계 1) TS는 DUT가 전송하는 BSM을 T1 시간 동안 수신하여 BSM이 수신되는 주기가 100 msec를 만족하는지 확인한다.
•(단계 2) TS는 Table 10의 테스트 케이스 #1의 목표 혼잡도(차량 밀도)에 맞춰 BSM을 전송한다.
•(단계 3) TS가 전송하는 BSM에 의해 안정적인 목표 혼잡도에 도달하고, 이에 따른 DUT의 혼잡제어 동작이 적용될 때까지의 충분한 시간(T2) 동안 기다린다.
•(단계 4) TS는 DUT가 전송하는 BSM을 T1 시간 동안 수신한다.
•(단계 5) TS는 T1 시간 동안 DUT로부터 수신된 BSM의 평균 주기가 Table 10의 테스트 케이스 #1의 기댓값(1단계)과 동일한지 확인한다.
•(단계 6) DUT는 55 km/h의 속도로 반경 80 m 이상의 원형 트랙을 90초 동안 주행한다.
•(단계 7) TS는 6단계 실행 중 DUT로부터 수신된 BSM의 평균 주기가 Table 10의 테스트 케이스 #1의 기댓값(2단계)과 동일한지 확인한다.
•(단계 8) Table 10의 테스트 케이스 #2에 대해 2~7단계를 반복한다.
6. 결 론
본 연구에서는 V2X 기술이 실제 도로에 적용되어, 수많은 차량과 인프라가 동시에 통신하면서 발생할 수 있는 통신 혼잡(Congestion)과 V2X 통신 성능 저하 환경에서 자동차에 장착된 V2X 통신장치의 혼잡제어 기술, 통신 신뢰성 및 안전성 평가를 위한 평가기술 관련 평가 항목, 평가 환경, 평가 방법 및 평가시스템을 도출하였다.
V2X 통신 혼잡제어 평가기술은 SAE J3161/1/1A 표준과 한국지능형교통체계협회의 LTE-V2X 통신악조건 시험 규격을 참조하여 도출하였으며, 시험이 진행되는 한국교통안전공단 자동차안전연구원에 구축된 시험 환경을 고려하여 국내 환경에 맞게 평가 환경 및 평가 방법을 최적화하였다.
향후 본 연구에서 도출한 V2X 통신 혼잡 환경에서의 자동차 V2X 통신성능 안전성 평가기술이 적절한지 V2X 통신장치를 실차에 장착한 후 혼잡제어 평가 항목의 시험을 진행할 계획이며, 이를 통해 평가 방법 각 시나리오에 필요한 주행속도, 목표 시작점, 위치, 거리, 시간 등의 구체적인 수치 도출과 평가 환경, 평가시스템, 평가 방법들을 고도화할 계획이다.
또한 시험을 통해 도출된 수정 사항을 지속해서 V2X 통신성능 안전성 평가기술에 반영하여 향후 V2X 통신장치가 법규화되면 기술고시나 시행규칙 등에 V2X 통신 혼잡제어 평가기술이 반영될 수 있도록 추진할 계획이다.
