

1. 서 론
2. 관련 연구
3. 사용자 설정 목적지 라우팅 HMI 설계
3.1. 시스템 목표 및 요구사항
3.2. 시스템 아키텍처
3.3. 태블릿 인터페이스
4. 시스템 구현
4.1. 기존 시스템과의 양립 가능성
4.2. 실시간성
4.3. 보안성
4.4. 내부-외부 서버 구성
5. 시스템 테스트
5.1. 시스템 제원
5.2. 테스트 환경
5.3. 테스트 내용 및 결과
6. 논 의
6.1. 결과 해석 및 활용 가능성
6.2. 한계 및 향후 연구 가능성
7. 결 론
1. 서 론
자율주행 기술은 빠르게 발전되어 왔으며, 보다 높은 레벨의 자율주행 시스템을 차량에 적용하고 이를 상용화하기 위한 노력이 함께 이어져오고 있다. 특히 운전자의 개입이 거의 필요하지 않은 레벨 4 이상의 자율주행(1)은 탑승자의 효율성 및 편의성에 더하여 도로 안전에도 새로운 기여가 가능할 것이다. 그러나 이러한 기술 발전에도 불구하고, 자율주행 차량과 이를 이용하는 사용자 간의 상호 작용이 효율적이고 사용자 중심으로 이루어지는지에 대한 의문이 존재한다.
지금까지의 자율주행 시스템은 대부분 고도로 정교한 네비게이션 시스템 기반의 사전 프로그래밍된 경로에 의존하였다. 이러한 방식은 사용자가 직접 차량의 목적지를 설정하기에 자율주행 시스템에 대한 개입 권한, 안전상의 문제가 존재하였다. 그러나 레벨 4 이상의 자율주행 시스템에서는 궁극적으로 사용자가 시스템을 사용하는 주체가 되어 목적지를 설정할 수 있어야 하고, 자율주행 차량이 그러한 요구에 부응할 수 있어야 한다.
본 연구에서는 이러한 필요성에 맞추어 자율주행 시스템과 사용자 간의 휴먼-머신 인터페이스를 구축하였다. 태블릿 기반 인터페이스를 통해 사용자는 자율주행 차량의 목적지를 선택할 수 있고, 차량 내/외부 서버의 실시간 통신을 통해 보안상, 자율주행 시스템상 안전한 동적 경로 계획이 가능하다. 자율주행 차량 실험을 통해서 해당 기능이 성공적으로 작동하는 것을 검증하였다.
2. 관련 연구
자율주행을 위한 인지, 측위, 판단, 제어 분야의 연구가 꾸준하게 진행되어 왔으며, 이는 자율주행의 수준을 높이는 것에 크게 기여하였다. 자율주행 기술 이외에도, 운전자의 개입이 불필요한 레벨 4 자율주행과 운전자 자체가 불필요한 레벨 5 자율주행을 실현하기 위한 자율주행 원격 관제(2,3) 및 제어(4~6) 시스템에 관한 연구가 최근 활발하게 진행되어 오고 있다. 이러한 연구에서는 자율주행차와 외부 서버 간의 실시간 통신을 통해 라이다, 카메라와 같은 차량 센서 정보와 도로 상태 등의 데이터를 주고받음으로써(7~9) 보다 안전한 주행이 가능하다는 점을 강조한다. 또한 원격 제어를 통해 자율주행 차량에서 발생할 수 있는 시스템 장애에 대한 대응 및 보안을 강화하는 방안을 제시(10)하며, 원격 제어 시 오퍼레이터의 인지 한계를 극복하기 위해 RRT(Rapidly-exploring Random Tree) 알고리즘 기반의 경로 생성 안내,(11) MPC(Model Predictive Control) 및 PC(Predictive Corridor) 기반의 원격 제어 보조 시스템에 대한 연구(12,13)도 함께 이어져 오고 있다.
자율주행 차량의 목적지까지 최적 경로 생성과 관련하여 RRT기반의 경로 계획과 Dijkstra 최적화기를 함께 사용하는 알고리즘(14)에 관한 연구와 복잡한 도심 시나리오에서 측위 및 경로 계획에 응용될 수 있는 지도 프레임워크인 Lanelet(15,16)에 관한 연구가 진행되었다. 경로 계획과 실행 과정에서 주변 환경을 고려하는 방식도 고려되었다. 주변 차량과 차량 간 통신(Vehicle to Vehicle, V2V)을 이용하여 동적으로 최적 경로를 선택하는 알고리즘에 관한 연구(17), 신호등이나 주변 도로 장비들과 차량-사회 기반 시설 간 통신(Vehicle to Infrastructure, V2I)을 통해 이상적인 경로 계획을 파악하는 연구 (18)가 진행되었다. 교통 상황에서 비협력적 경로 선택으로 인한 비효율성을 해결하기 위해 자율주행 차량의 경로 제어 체계에 관한 연구(19)도 진행되었으며, 자율주행 차량의 경로 계획 및 네비게이션 기술의 보안 위협에 대한 대책도 제안(20)되었다. 그러나 차량 내에서 사용자 중심의 자율주행 차량 목적지 설정에 관한 연구는 아직까지 미진한 상황이다.
관련 연구를 바탕으로 해당 연구에서는 레벨 4 이상의 자율주행 상황에서 운전자의 개입 없이 사용자가 자율주행 차량에 능동적으로 목적지 정보를 입력할 수 있는 휴먼-머신 인터페이스를 구축하였다. 레벨 4 이상의 자율주행 상용화를 위해 최근 활발하게 연구되고 있는 원격 관제 및 제어 서버를 활용하여 전반적인 시스템 안전성을 확보하였으며 차량 내부에 별도의 서버를 구축함으로서 보안상으로도 안전한 시스템을 구축하였다. 목적지 정보가 사용자에 의해 시스템에 안전하게 전달되면, 자체적으로 구축한 경로 계획 알고리즘에 의해 경로를 생성하고, 이는 휴먼-머신 인터페이스를 통해 사용자에게 확인할 수 있는 정보로 되돌아오며 사용자 정의 목적지 기반의 자율주행이 가능하다.
3. 사용자 설정 목적지 라우팅 HMI 설계
3.1. 시스템 목표 및 요구사항
사용자 설정 목적지 라우팅 휴먼-머신 인터페이스를 통하여 자율주행 차량에 탑승한 탑승객이 자율주행 차량에 원하는 목적지를 입력할 수 있는 인터페이스를 구축하는 것을 목표로 한다. 입력된 목적지 정보는 자율주행 소프트웨어에 전달되어 차량이 주행할 수 있는 경로를 반환하고, 해당 경로로 자율주행이 가능해야 한다.
사용자가 위의 과정을 수행하는 것에 있어 기존의 자율주행 시스템과 양립 가능성을 확보해야 한다. 즉, 사용자의 입력으로 인해 자율주행 시스템에 문제가 발생하지 않아야 한다. 다음으로 실시간성이 보장되어야 한다. 사용자가 목적지를 입력하면 해당 정보가 실시간으로 차량에 전달되어야 하며, 차량에게 정보가 성공적으로 전달되었음이 사용자에게 실시간으로 반환되는 것이 중요하다. 또한, 보안성이 확보되어야 한다. 자율주행 차량의 목적지를 선택한다는 것은 충분한 권한이 확보될 때만 진행되어야 하며, 그렇지 않을 경우 원치 않는 목적지가 설정되는 등 안전상 문제가 발생할 수 있다. 시스템은 사용자가 사용하기 쉽도록 사용자 친화적이어야 하며, 이를 위해 직관적인 디자인과 경유지 설정 등의 편의 기능도 함께 탑재할 필요성이 있다.
3.2. 시스템 아키텍처
목표 시스템 구현을 위해 아키텍처를 Fig. 1과 같이 설계하였다. 크게 외부 서버, 태블릿 인터페이스, 자율주행 차량 파트로 구분할 수 있다.
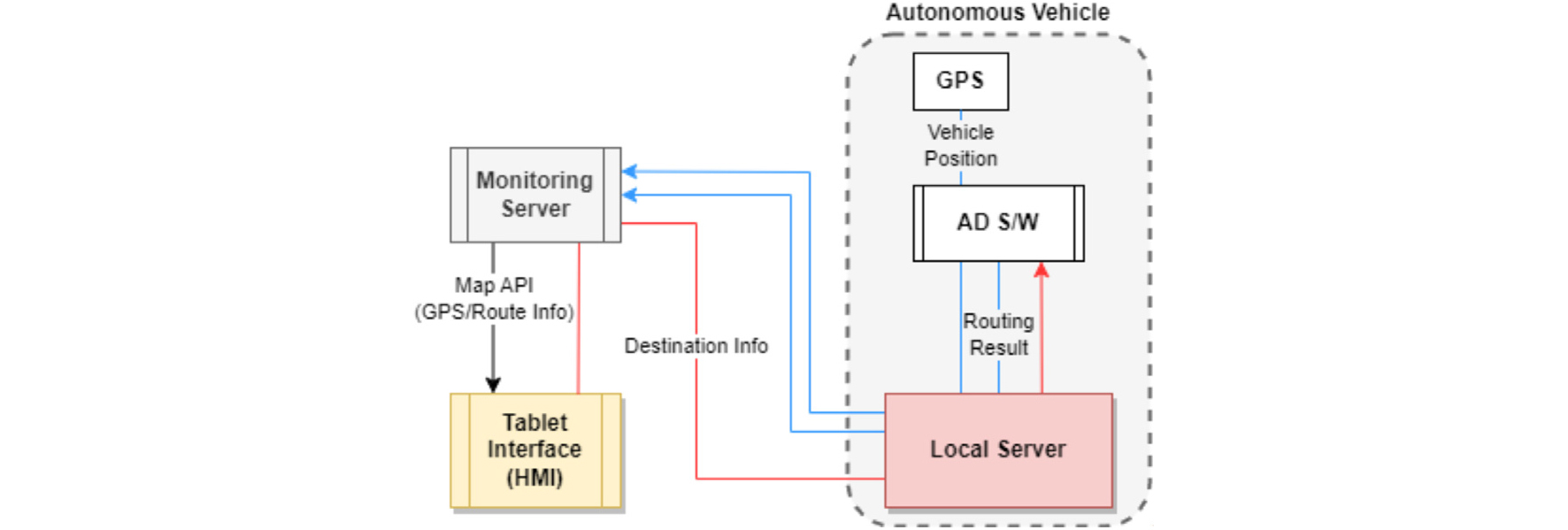
외부 서버는 자율주행 차량을 관리하는 원격 관제 및 제어 서버를 지칭한다. 서버에서 URL 라우팅을 통하여 차량에서 접속할 수 있는 외부 IP 주소를 제공한다. 차량 내부에 존재하는 태블릿 인터페이스를 통해 해당 주소에 접속하면, 지도 API를 통해 현재 위치 기반의 지도 정보를 제공받을 수 있다. 지도 API는 Kakao 사에서 제공하는 카카오 지도 API를 사용하였다. 휴먼-머신 인터페이스(태블릿 인터페이스)는 차량에 장착된 터치형 태블릿이다. 외부 서버 IP에 접속할 수 있도록 인터넷 연결이 가능하다면 운영체제에 관계없이 사용이 가능하다. 같은 이유로 PC, 휴대폰 등으로도 확장이 가능하다. 로컬 서버는 자율주행 차량 내부에 차량용 서버를 지칭한다. 해당 서버는 자율주행 소프트웨어를 구동하는 PC에서 Python Flask를 이용하여 구축하였으며, 차량 내부 네트워크를 통해서만 접근이 가능하다. 로컬 서버는 자율주행 소프트웨어와 ROS(Robot Operating System)의 topic 형식으로 통신을 주고받는다. 차량의 위치정보 기반의 시스템을 구축하기 위하여 센서 정보는 GPS 정보만을 사용하며, 해당 정보 또한 ROS topic 형식으로 자율주행 소프트웨어로부터 로컬 서버로 전달된다.
외부 서버 IP에 인터넷이 가능한 태블릿 인터페이스를 통하여 접속하면 지도 API로 구성된 사용자 설정 목적지 UI(User Interface)를 이용할 수 있다. 경유지 및 목적지 정보를 입력하면 해당 정보는 로컬 서버, 외부 서버간 소켓 통신을 통해 외부 서버에서 로컬 서버로 전달된다. 이는 다시 자율주행 소프트웨어에 입력되고, 자율주행 소프트웨어의 전역 라우팅 알고리즘을 거쳐 경로 정보로 반환된다. 경로 정보는 다시 로컬 서버, 외부 서버간 소켓 통신으로 외부 서버에 전달되며, 지도 API를 통해 태블릿 인터페이스에 표시된다. GPS 정보 또한 같은 방식으로 로컬 서버로부터 외부 서버에 전달되어 지도 API를 통해 태블릿 인터페이스에 받아올 수 있다.
3.3. 태블릿 인터페이스
시스템 아키텍처에서 소개한 태블릿 인터페이스는 Fig. 2와 같이 구성하였다.
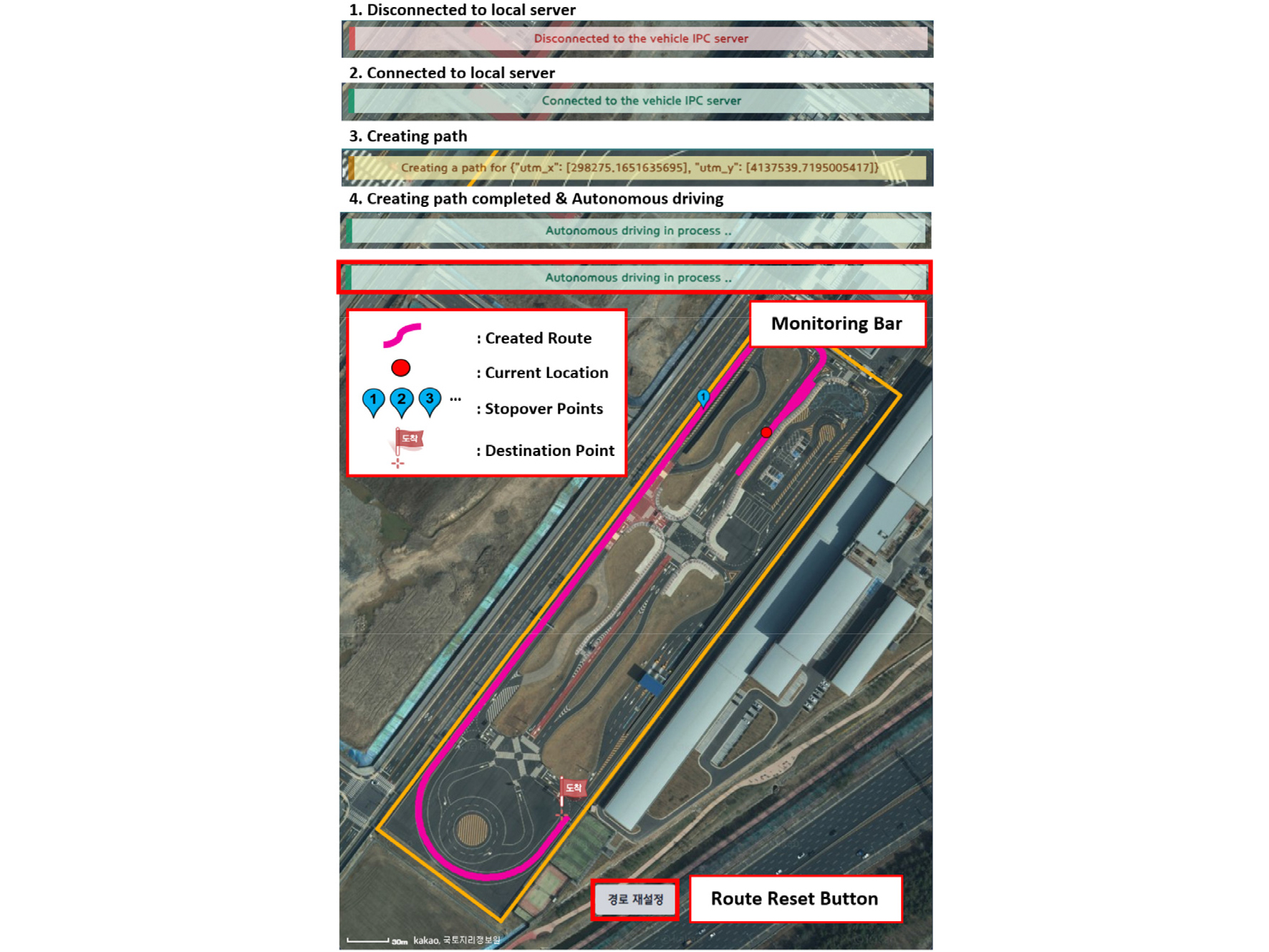
인터페이스 상단에 모니터링 바가 위치하여 이를 통해 로컬 서버와의 연결 상태를 확인할 수 있다. 1. 연결 끊김, 2. 연결, 3. 경로를 생성 중, 4. 경로 생성 완료의 총 4가지 상태를 표시할 수 있다. 인터페이스 하단에는 경유지 설정, 목적지 설정 버튼이 위치하여 사용자가 원하는 경유지와 목적지를 설정할 수 있는 기능을 제공한다. 경유지 설정 버튼 클릭 시에는 경유지 번호와 함께 숫자 마커가 추가된다. 목적지 설정 버튼 클릭 시에는 경유지 및 목적지 정보가 WGS84 좌표계(위도/경도)로 외부 서버로부터 로컬 서버에 전달된다. WGS84 좌표 정보는 로컬 서버를 거치며 UTM-K 좌표계로 변환되어 경로 생성 알고리즘으로 전달된다. 경로 생성이 완료되면 경로 정보는 다시 로컬 서버에서 WGS84 좌표계로 변환되고 외부 서버를 거쳐 지도 API에 전달된다. 좌표계 변환 과정을 거치는 것은 지도 API(WGS84)와 자율주행 알고리즘(UTM-K)이 각각 다른 좌표계를 기반으로 하기 때문이다. 과정이 모두 완료되면 Fig. 2와 같이 태블릿 인터페이스에 경유지, 목적지, 생성된 경로 가 함께 표시된다. 자율주행 차량의 GPS 센서 기반 현재 위치는 빨간색의 마커로 확인할 수 있다.
4. 시스템 구현
4.1. 기존 시스템과의 양립 가능성
사용자 지정 목적지 라우팅 시스템 적용 및 사용자 입력 등으로 인해 기존의 자율주행 시스템에 문제가 발생하지 않아야 한다.
사용자가 태블릿을 이용하여 목적지를 입력하는 구현 방식은 자율주행 소프트웨어가 탑재된 PC를 직접 조작하여 목적지를 설정하는 방식에 비해 안전하다. 사용자는 로컬 서버를 거쳐 자율주행 소프트웨어와 간접적으로 통신하기 때문에 사용자의 권한은 목적지 설정 기능에 한정되고, 기존의 시스템에는 접근할 수 없다. 이렇게 기존의 자율주행 시스템과 분리되어 있는 시스템 구조는 다른 자율주행 차량에도 쉽게 적용 가능하다는 장점을 가진다. 한편, 이중 입력 등 사용자의 오용으로 발생할 수 있는 Racing condition 문제를 방지하기 위해 태블릿 버튼 비활성화 기능을 함께 구현하였다. 태블릿이 로컬 서버와 연결되지 않았을 경우 목적지 입력 버튼이 비활성화되며 목적지를 설정할 수 없다. 목적지 설정 버튼을 한번 누른 뒤에는 목적지를 재입력 할 수 없고, 경로를 재설정하는 것만 가능하다.
4.2. 실시간성
사용자 지정 목적지 라우팅 시스템을 위해서는 실시간성이 보장되어야 한다. 현재 위치를 출발지로 하여 경유지 및 목적지에 대한 경로 계획을 위해서는 정확한 현재 위치 정보를 실시간으로 파악하는 것이 중요하다. 또한 목적지 입력과 생성된 경로가 실시간으로 사용자에게 제공되어야 이중 입력 등 사용자의 오용 가능성을 줄일 수 있다.
이를 위해, Python Flask 기반의 로컬 서버를 병렬적인 소켓으로 구성함으로써 병렬적 실시간성을 확보하였다. 소켓 통신은 클라이언트와 서버간 데이터 스트림이 실시간으로 전달되는 특성 상 실시간 통신에 유리하다. 외부 서버는 하나의 로컬 서버의 주소와 실시간 통신을 수행하는데, Table 1과 같이 포트 번호를 달리하여 병렬적으로 소켓을 구성하여 전송 주기가 다른 로컬 서버와의 연결 정보, GPS 정보, 생성된 Route 정보를 병렬적으로 교환할 수 있다.
Table 1.
Parallel socket configuration for real-time availability
| IP Address | Exchanged Data |
| {Internal IP Address}:{Port 1} | Local server connection information |
| {Internal IP Address}:{Port 2} | GPS information |
| {Internal IP Address}:{Port 3} | Route information |
4.3. 보안성
3.1에서 언급했던 내용처럼, 자율주행 차량에서 목적지 설정 기능은 충분한 보안이 확보되어야 한다.
이를 위해 해당 연구에서는 차량 내부망을 활용하였다. Fig. 3의 시스템 통신 구성과 같이 차량 내부 공유기를 통해 로컬 서버가 실행되는 PC와 태블릿 인터페이스가 내부망으로 연결될 수 있다. 이처럼 같은 내부 네트워크를 통해 로컬 서버와 태블릿 인터페이스가 연결되어야 목적지 정보를 입력할 수 있기 때문에 외부에서 임의로 자율주행 차량의 목적지를 설정하는 보안상의 문제를 방지할 수 있다.
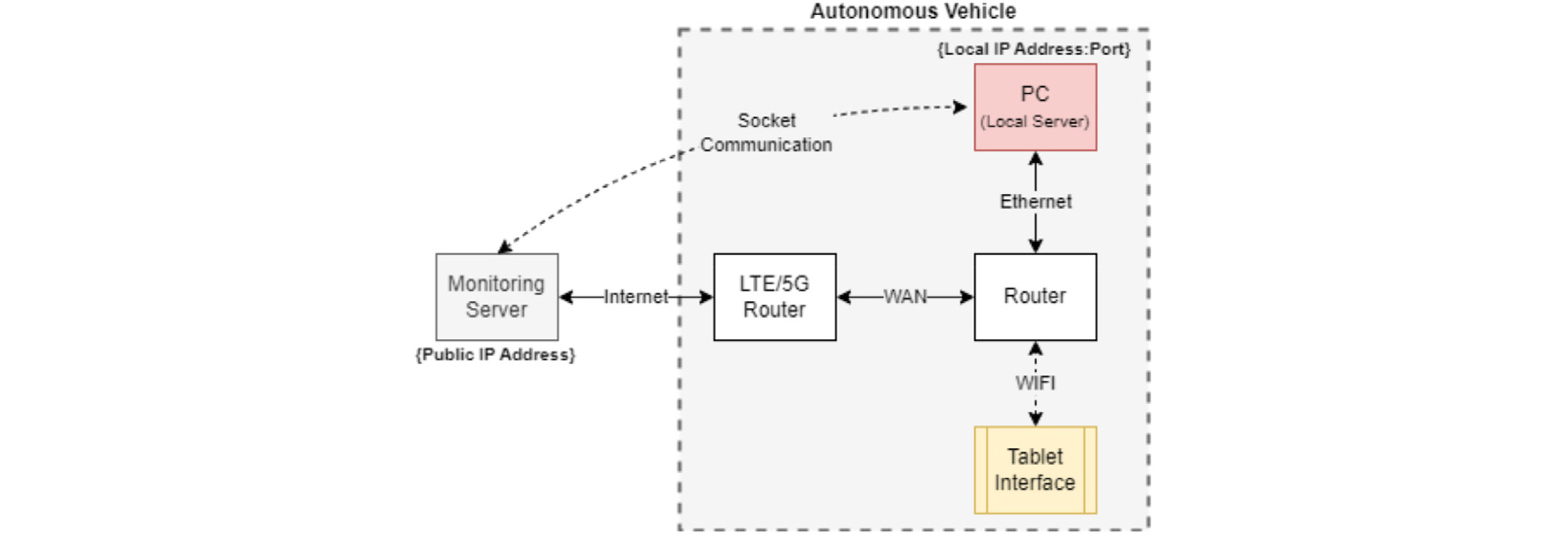
한편, 차량에 설치된 LTE/5G 라우터를 통해 태블릿 인터페이스에서 외부 서버의 공인 IP 주소에 접속할 수 있다. 해당 주소는 차량 외부의 다른 기기에서도 접속이 가능하나, 외부 서버와 자율주행 차량의 로컬 서버 간의 소켓 통신은 내부 망 주소로의 리디렉션 과정을 거쳐 이루어지기 때문에 차량 외부의 다른 기기에서 목적지 설정 인터페이스를 조작하여도 차량의 로컬 서버에는 전달되지 않는다. 이러한 이중 서버 구성을 통하여 추가적인 보안성을 확보하였다.
4.4. 내부-외부 서버 구성
Fig. 1, Fig. 3과 같이 사용자 지정 목적지 라우팅 시스템은 외부에서도 접속 가능한 외부 서버와 차량 내부망을 통해서만 접근 가능한 내부 서버의 이중 서버 구성을 가지고 있다.
이러한 서버 구성은 4.2에서 언급했듯 자율주행 차량의 목적지 설정 기능에서 이중 보안 장치로 작용한다. 또한 서버를 2개로 나눠 구성함으로써 시스템을 보다 효율적으로 관리할 수 있다. 차량 내부 서버만을 이용하여 해당 기능을 구현할 경우, 시스템에 변경사향이 있을 경우 기능을 적용한 모든 차량에서 변경사항을 반영해줘야 한다. 그러나 외부 서버를 거쳐 로컬 서버로 리디렉션되는 방식은 외부 서버 지도 API에 수정 사항이 있을 경우 모든 자율주행 차량에 이를 동시에 반영할 수 있다. 또한, 외부 서버를 이용할 경우 원격 관제 및 제어 시스템과 연결하여 확장 가능성이 존재한다. 차량에 운전자가 없이 탑승객만 탑승하는 레벨 4 이상의 자율주행 상황을 가정하였을 때, 탑승객 외에 차량의 목적지가 어딘지, 경로가 어떻게 생성되었는지 알지 못한다면 안전상 문제가 발생할 수 있다. 그러나 서버를 이중으로 구성할 경우 외부 서버에서 이를 모니터링하고 정상적인 목적지 입력과 경로 생성이 이루어졌는지 확인할 수 있으며, 운전자가 탑승하지 않는 레벨 4 이상의 자율주행 차량의 안전 확보에 도움을 줄 수 있다.
5. 시스템 테스트
5.1. 시스템 제원
시스템 테스트를 위하여 Xeon Gold CPU, 128GB RAM이 탑재된 외부 서버를 사용하였으며, 자율주행 차량 내 장착된 3대의 산업용 PC 중 Xeon 24 Core CPU, 32GB RAM, RTX2080 GPU 사양의 PC 1대를 사용자 지정 목적지 라우팅 기능을 위해 활용하였다. 태블릿 인터페이스로는 WIFI 기능을 사용할 수 있는 11인치 터치형 태블릿을 사용하였다.
5.2. 테스트 환경
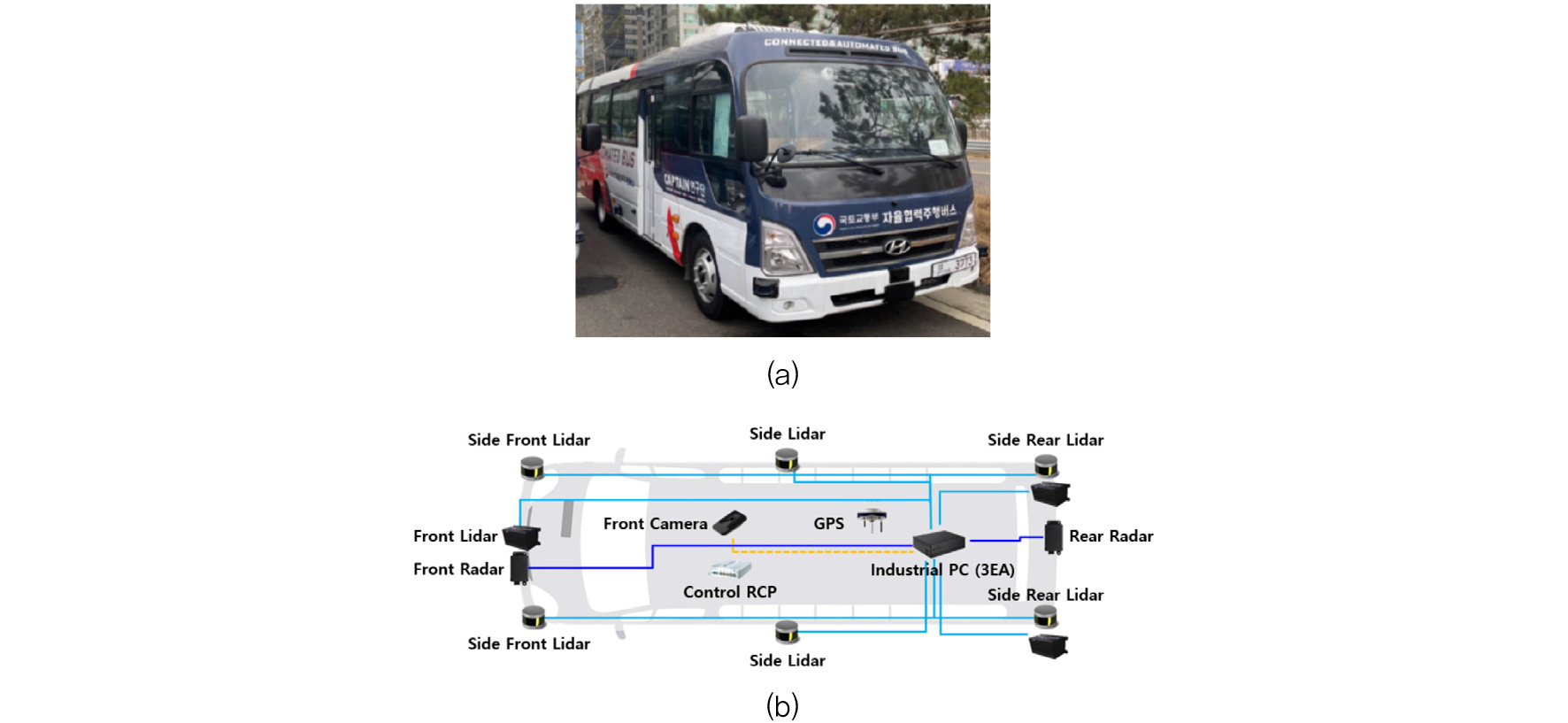
자율주행 차량의 사용자 지정 목적지 라우팅을 위한 휴먼-머신 인터페이스에 대한 평가를 위해 Fig. 4의 서울대학교 시흥캠퍼스 미래모빌리티기술센터(Future Mobility Technology Center, FMTC) 주행장을 테스트 트랙으로, Fig. 5(a)의 현태 카운티 일렉트릭 차량을 테스트 차량으로 사용하였다. 해당 차량은 자율주행을 위해 Fig. 5(b)의 센서 구성으로 개조되었으며 자율주행 소프트웨어를 탑재하고 있다.

5.3. 테스트 내용 및 결과
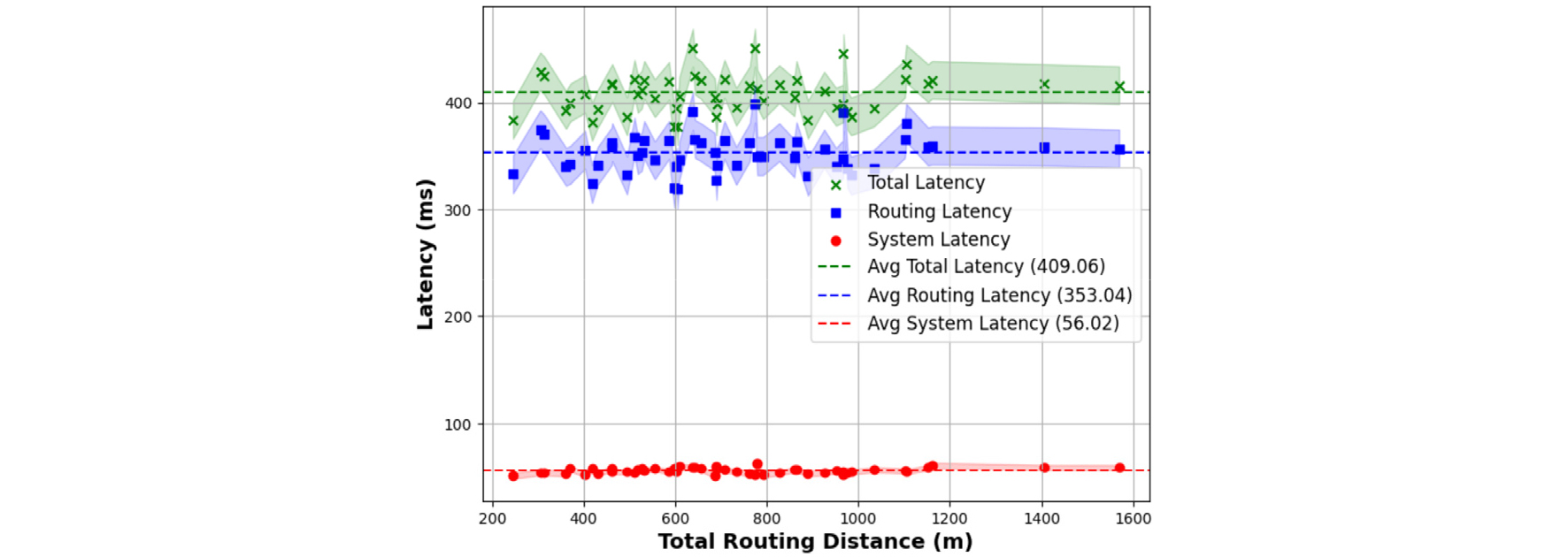
자율주행 차량의 사용자 지정 목적지 라우팅 기능을 테스트 차량에 탑재하여 테스트 트랙을 50회 자율 주행하는 테스트를 진행하였다. 경유지 설정을 포함하여 트랙 내 200 m~1,600 m 길이의 경로를 생성하고 최대 40 km/h의 속도로 자율 주행하는 실험을 반복하였다. 실험 결과와 프로그램의 지연 시간은 Table 2, Fig. 6과 같다. 총 50번의 실험에 대하여 50번 모두 경로를 성공적으로 생성하고 태블릿 인터페이스에 출력하였으며, 자율주행 또한 성공적으로 수행하였다. 태블릿 인터페이스에서 경유지, 목적지 정보를 입력하고 경로 정보를 받아오는데 까지의 총 지연시간을 (a), 자율주행 소프트웨어의 경로 생성 알고리즘에서 목적지를 받아 경로를 생성하는데 걸리는 시간을 (b) 라고 하였을 때, HMI 시스템의 지연시간은 (a-b)로 구할 수 있다. HMI 시스템은 평균 56.02 ms, 표준편차 2.75 ms로, 실험 전반에 걸쳐 안정적이고 빠른 지연시간을 나타냈다. 이는 내부망을 통한 소켓 통신으로 실시간성이 충분히 확보된 결과로 볼 수 있다. 대부분의 지연시간은 경로 생성 알고리즘에서 발생하였으며, 생성된 경로의 길이와 관계없이 409 ms의 총 지연시간이 평균적으로 나타났다.
Table 2.
Result of success rate and latency
| Success count / Total trials | 50 / 50 | ||
| Success rate (%) | 100 | ||
| Average | Standard Deviation | ||
|
Response time (ms) | (a) Total | 409.06 | 17.60 |
| (b) Path generation | 353.04 | 17.67 | |
| (a-b) HMI system | 56.02 | 2.75 | |
차량의 로컬 서버에서 서버 연결 정보, GPS 정보를 오류 없이 외부 서버로 실시간 전송하였고 이는 지도 API를 통해 태블릿 인터페이스에 정상적으로 출력되었다. 사용자가 태블릿 인터페이스를 통해 설정한 경유지, 목적지 정보가 경로 생성에 정상적으로 반영되었으며 경유지의 개수는 제한 없이 확장 가능하다는 것을 확인하였다. 또한 차량 내부에서 LTE/5G 라우터를 사용하였을 때 모두 시스템이 정상적으로 동작하는 것을 확인하였다. 사용자 지정 목적지 라우팅 기능이 기존의 자율주행 시스템 작동 주기(20 Hz)에 영향을 주지 않는 것을 통해 기존 자율주행 시스템과의 양립 가능성을 검증하였다. 차량의 내부망이 아닌 외부 네트워크를 통해 목적지를 설정하려는 시도를 했을 때 자율주행 시스템에는 반영되지 않았으며, 이를 통해 사용자 지정 목적지 라우팅 시스템의 보안성을 검증하였다.
6. 논 의
6.1. 결과 해석 및 활용 가능성
5.2를 통해 자율주행 차량의 사용자 지정 목적지 라우팅 기능이 성공적으로 작동하는 것을 확인할 수 있었고, 이는 목적한 대로 운전자가 없는 레벨 4 이상의 자율주행 시스템에서 활용될 수 있을 것이다. 자율주행 버스 등 정해진 경로를 주행하는 차량에게는 경로 변경의 유연성을 제공할 수 있고, 자율주행 택시 등에는 필수적인 기능이 될 것으로 기대할 수 있다.
테스트를 통해 검증하였듯, 기존의 자율주행 소프트웨어 PC에서 실행하여도 부하가 거의 없고 빠른 지연시간을 확보할 수 있다는 것은 해당 기능을 탑재함에 있어 태블릿 인터페이스 1대 외에 추가적인 하드웨어 구성이 필요하지 않다는 것을 의미한다. 이러한 특성을 바탕으로 기존에 이미 구성되어 있는 자율주행 차량에도 유연하게 적용이 가능할 것이다.
또한, 4.3의 내용과 같이 자율주행차량 원격 관제 서버와 연관하여 확장 가능성이 존재한다. 여러 대의 무인 자율주행 차량의 목적지 및 경로 정보를 관제 서버에서 수집하고 모니터링한다면 자율주행 차량의 안전성 확보에 더하여, 여러 차량의 주행 경로를 바탕으로 한 동적 경로 계획 등의 데이터 활용이 가능할 것이다.
6.2. 한계 및 향후 연구 가능성
자율주행 차량의 사용자 지정 목적지 라우팅 기능에 대한 테스트는 서울대학교 미래모빌리티센터 테스트 트랙 내에서만 진행되었다는 한계점이 존재한다. HD map을 기반으로 하는 경로 계획 알고리즘 특성 상, HD map이 존재하는 실제 시내 도로에서도 충분한 테스트가 가능하다. 이처럼 보다 다양한 변수가 존재하는 테스트 환경에서도 검증이 필요하다.
또한, 현대 카운티 일렉트릭 자율주행 차량 대상으로만 테스트가 이루어졌다는 한계점이 존재한다. 해당 시스템은 여러 자율주행 차량에도 유연하게 적용 가능하므로, 여러 자율주행 차량에서 동시에 목적지 설정을 요청하는 경우를 테스트할 필요성이 있다. 여러 대의 차량이 각각의 로컬 서버를 구축하지만, 외부 서버는 1개만을 사용하는 아키텍처 특성 상 외부 서버에서 동시다발적인 목적지 설정 요청에 대응이 가능한지 확인이 필요하다.
한편, 사용자 편의성과 관련하여 이전 경로 불러오기, 경로 저장 등의 기능에 대한 추가 개발이 가능할 것이다.
7. 결 론
본 연구의 결과를 요약하면 다음과 같다.
1) 자율주행 차량의 주행 경로를 사전 프로그래밍 된 고정 경로 대신 사용자가 목적지와 경유지를 직접 지정할 수 있는 경로로 확장하였다.
2) 사용자 지정 목적지 라우팅 시스템에서 실시간성, 보안성을 보장하기 위해, 외부 서버와 로컬 서버를 이중으로 구성한 시스템 아키텍처를 도입하였다.
3) 기존의 자율주행 시스템에 유연하게 적용할 수 있고, 양립 가능함을 실제 차량 실험을 통해 검증하였다.
4) 자동차 내부 및 외부 서버 자원을 활용한 휴먼-머신 인터페이스의 개발을 통해 자율주행 차량 탑승객의 능동적인 탑승 경험을 가능하게 하였다.
