

1. 서 론
2. 이론적 배경
2.1. 듀얼카메라를 활용한 거리측정 이론
2.2. 시험 시나리오
3. 실차시험
3.1. 실차시험 차량
3.2. 실차시험 장소
3.3. 실차시험 조건
4. 듀얼카메라를 활용한 시험결과 및 분석
4.1. 측정장비를 활용한 실차시험 결과
4.2. 듀얼카메라를 활용한 실차시험 결과
4.3. 실차시험 결과 비교분석
5. 결 론
1. 서 론
최근 세계적으로 자율주행자동차에 대한 관심이 높아지면서, 자율주행의 핵심 기능으로 종방향 제어 시스템과 횡방향 제어 시스템에 대한 연구가 진행 중이다. 상용차에 적용되어 있는 자율주행 기능은 ADAS(Advanced Driver Assist System)로 불리며, 이에 대한 연구도 활발히 진행되고 있다. 종방향 제어 시스템의 예는 ACC(Adaptive Cruise Control), AEB(Autonomous Emergency Braking control) 등이 있으며, 횡방향 제어 시스템의 예는 LKAS(Lane Keeping Assistance System), LCS(Lane Change System) 등이 있다.(1~6)
ACC의 목적은 자동차 종방향 속도와 상대거리의 제어를 통해 운전자의 운전 피로도를 최소화시켜주는데 있으며, 자율주행자동차의 기반 시스템으로서 사고 예방 및 방지에 유용한 시스템으로 평가되고 있다.(7)
ACC의 연구동향을 살펴보면, Kim 등은 ACC 차량의 시험평가 방법에 대하여 시험평가 시나리오와 이론적 평가 기준을 제안하였고,(8) Kim 등은 국내도로 환경 기준에 부합하는 ACC 시험평가 방법에 관한 연구를 진행하였다.(9) 또한, Kim 등은 실도로 환경에서 진행 실차시험과 실도로 환경을 구현한 시뮬레이션의 비교에 관한 연구를 진행하였으며,(10) Son 등은 ACC의 안전성 평가를 위한 시뮬레이션(simulation) 환경 개발을 위한 시나리오를 제안하였다.(11) Moon 등은 ACC의 평가 프로그램을 제시하였고,(12) Yoon 등은 ACC와 FCWS(Forward Collision Warning System)의 기능과 성능평가를 위한 차량주행 프로그램의 시험평가 방법과 절차에 대하여 연구하였다.(13) Xiaobo Sun 등은 ACC시스템을 장착한 하이브리드 전기 자동차를 위한 실시간 최적 자동차 추종 전력 관리 전략에 대해 연구하였고,(14) Chongpu Chen등은 ACC 제어를 위한 컷인 시나리오 기반의 모델 예측 제어 알고리즘에 대한 연구를 진행하였으며,(15) Pier Giuseppe Anselma는 에너지 절약 및 승객 편의 개선을 위한 파워트레인 지향 ACC를 연구하였다.(16) 그리고, Arie P. van den Beukel 등은 운전자가 보조시스템(ACC)을 활용할 때 운전 능력 평가에 대해 연구하였으며,(17) Lin Liu 등은 인간의 운전 행동 특성에 따른 ACC의 평가에 대해 연구하였다.(18)
카메라를 활용한 거리측정에 관한 연구동향을 살펴보면, Bae 등은 단안카메라(monocular camera)를 이용한 전방 차량과의 거리 계산에 관한 연구를 진행하였고,(19) Lee 등은 듀얼카메라(dual camera)의 최적 설치 위치와 전방 차량과의 거리 측정에 관한 연구를 진행하였다.(20) 그리고, Lee 등은 물체 인식에 의한 카메라의 시각 위치 및 거리 추출에 관한 연구를 진행하였으며,(21) Han 등은 HD 해상도 스테레오 영상 카메라 구형과 거리 인식 응용에 대해 연구하였고,(22) Juncai Zhu 등은 딥러닝 기반의 배경 보정 및 이동 물체 감지에 대해 연구하였다.(23) Ya-Wen Hsu등은 모노비전과 라이더 퓨전을 활용하여 도로상의 물체 감지 시스템 개발에 대해 연구하였으며,(24) Xiaoning Zhu등은 카메라 감지 시스템을 위해 통계 경험 기반의 적응형 원샷 감지기 개발에 대해 연구하였다.(25)
그러나 ADAS의 실도로 환경에서 시험평가 방법에 관한 연구와 카메라를 활용한 시험평가 방법에 대한 연구는 부족한 실정이다. 따라서 본 연구에서는, ACC의 실도로 환경에서 듀얼카메라의 활용 가능성의 연구를 위해, 선행 연구에서 제안한 ISO 15622의 시험방법과 국내도로 환경을 고려한 시험 시나리오와 듀얼카메라를 사용한 거리측정 방법 기반의 실차시험을 진행하고, 계측장비를 이용한 실차시험 결과와 듀얼카메라를 활용한 상대거리를 비교분석하여 듀얼카메라를 이용한 ACC 시험 가능성을 검증하고자 한다.
2. 이론적 배경
2.1. 듀얼카메라를 활용한 거리측정 이론
2.1.1. 듀얼카메라 최적 설치 위치 선정
선행연구에서, 차량 시험을 위한, 듀얼카메라를 활용한 전방 물체까지의 거리 측정 이론식을 제안하였다. 또한, 듀얼카메라의 최적 위치를 선정하는 연구를 수행하였다.(20)
듀얼카메라의 최적 위치 선정을 위한 변수는 높이, 간격, 각도이다.
카메라 설치 높이를 변수로 선정한 이유는, 높이가 낮을수록 영상에 촬영되는 지면의 영역이 증가되기 때문이다.
카메라 설치 간격을 변수로 선정한 이유는, 카메라 2대의 설치 간격에 따라 거리측정에 영향을 주기 때문이다.
카메라의 촬영 각도를 변수로 선정한 이유는, 수직 화각이 작은 카메라는 근거리 지면을 촬영하지 못하기 때문이다.
각 변수의 값은 Table 1에 정리하였다. 각 변수의 실험을 통하여, 카메라 설치 높이 40cm, 카메라 설치 간격 30cm, 카메라 촬영 각도 12°에서 가장 우수하여, 자동차 앞 범퍼를 최적 위치로 선정하였다.
Table 1.
Dual camera parameters
| Variable | Variable value | ||
| Height | 30cm | 40cm | 50cm |
| Interval | 10cm | 20cm | 30cm |
| Angle | 3° | 7° | 12° |
카메라 설치 높이 40cm로 선정된 이유는, 30cm에서 40cm로 높이가 증가할 때, 오차율이 감소하였다. 그리고, 40cm에서 50cm로 높이가 증가할 때, 오차율이 증가하였다.
카메라 설치 간격 30cm로 선정된 이유는, 간격이 증가할수록 오차율이 감소하는 경향을 보였다.
카메라 촬영 각도 12°를 선정한 이유는, 값이 증가할수록 오차율이 감소하는 경향을 보였다.
2.1.2. 듀얼카메라를 활용한 전방거리 계산
거리 측정을 위해 선정된 카메라의 최적위치인, 카메라 설치 높이 40cm, 카메라 설치 간격 30cm, 카메라 촬영 각도 12°에 설치한다.
Fig. 1과 같이, 듀얼카메라의 기하학적 구조와 삼각측량법을 이용한, 3차원 좌표를 식 (1)로 표현이 가능하다.
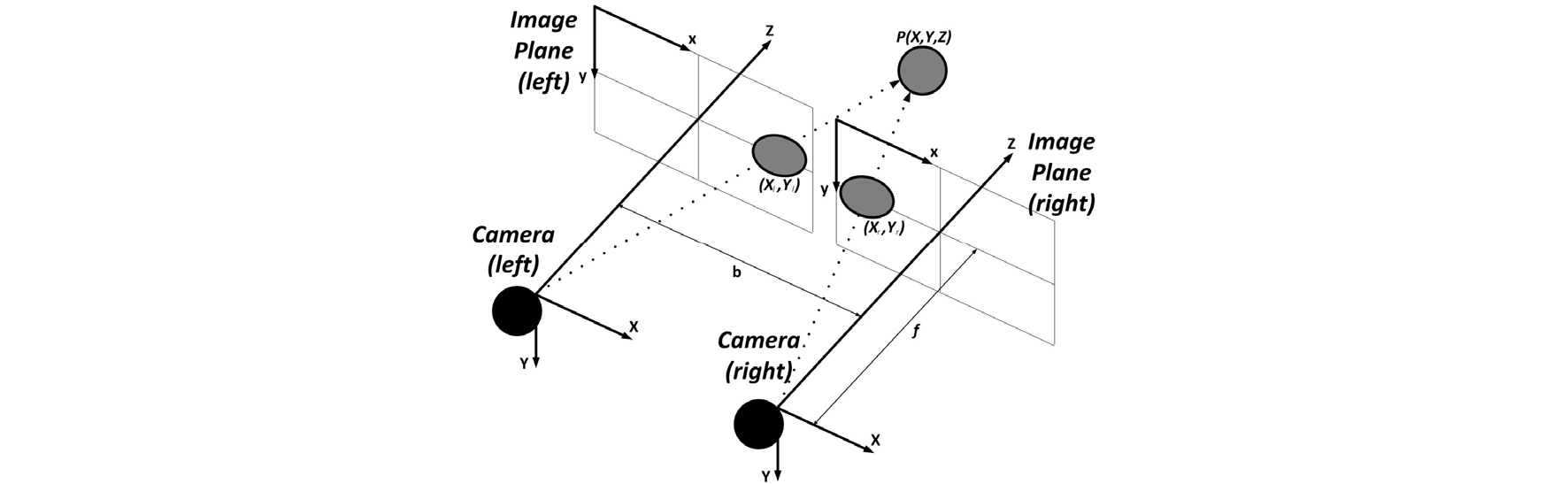
여기서, X, Y, Z는 세계 좌표계 상의 물체 좌표, f는 초점거리, b는 좌우 카메라 사이의 간격, d는 시차, xl은 왼쪽 영상의 x좌표, xr은 오른쪽 영상의 x좌표, yl은 왼쪽 영상의 y좌표, yr은 오른쪽 영상의 y좌표이다.
초점거리는 Z축 좌표를 계산하기 위해 필요한 파라 미터중 하나이다. 하지만 일반적으로 웹캠과 같은 저가의 카메라의 초점거리는 제공되지 않는다. 따라서, 오차 발생에 따른 값의 보정이 필요해진다.
초점거리의 보정을 위해, 커브 피팅(curve fitting)을 수행하여야 한다. 이때, 식 (1)에서 Z축 좌표 z와 d의 반비례 관계를 활용하여 식 (2)를 도출할 수 있다.
여기서, 여기에서, α, β는 초점 거리 보정을 통해 얻은 계수, Z는 실제거리, d은 시차이다.
식 (2)의 계수 α, β를 도출하기 위해, 1m부터 5m까지 0.5m 간격으로 설치한 물체를 촬영하여 각 지점에서의 물체의 시차를 계산하고, 커브 피팅으로 계수 α, β를 도출하였다.
계수 α를 초점거리 f로 사용하여 식 (1)에 대입하면, 물체의 Z축 좌표를 얻을 수 있다. 하지만, 근접 거리의 지면을 촬영하기 위해, 설치 각도 θ로 인하여 광축과 지면이 평행하지 않다. 따라서, 물체까지의 Z축 좌표를 계산하기 위하여, 식 (1)에 설치 각도 θ를 고려하면 식 (3)으로 정리 할 수 있다.
여기서, Xg, Yg, Zg는 지면에서 물체의 X, Y, Z축 좌표, θ는 카메라의 경사각, h는 카메라의 장착 높이이다.
Fig. 2와 같이, 직선도로에서 전방물체까지의 거리는 종방향 수직거리이다. 따라서 Z를 전방 물체까지의 거리로 사용 가능하다.
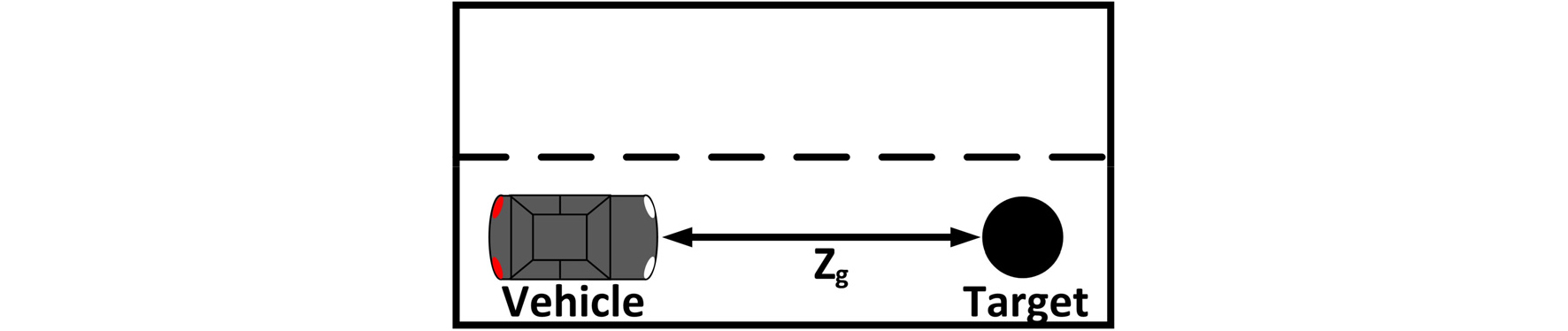
Fig. 3과 같이, 곡선도로에서는 전방 물체까지의 거리 측정을 위해, 도로의 곡률반경을 고려하여야 한다. 그에 따라, 물체의 X축 좌표와 Z축 좌표를 이용하여 수직거리를 구한다. 그 뒤, 곡률반경을 고려하여 전방 물체까지의 거리를 계산하여야 한다. 전방물체까지의 수직거리는 식 (4)와 같이 나타낼 수 있다.
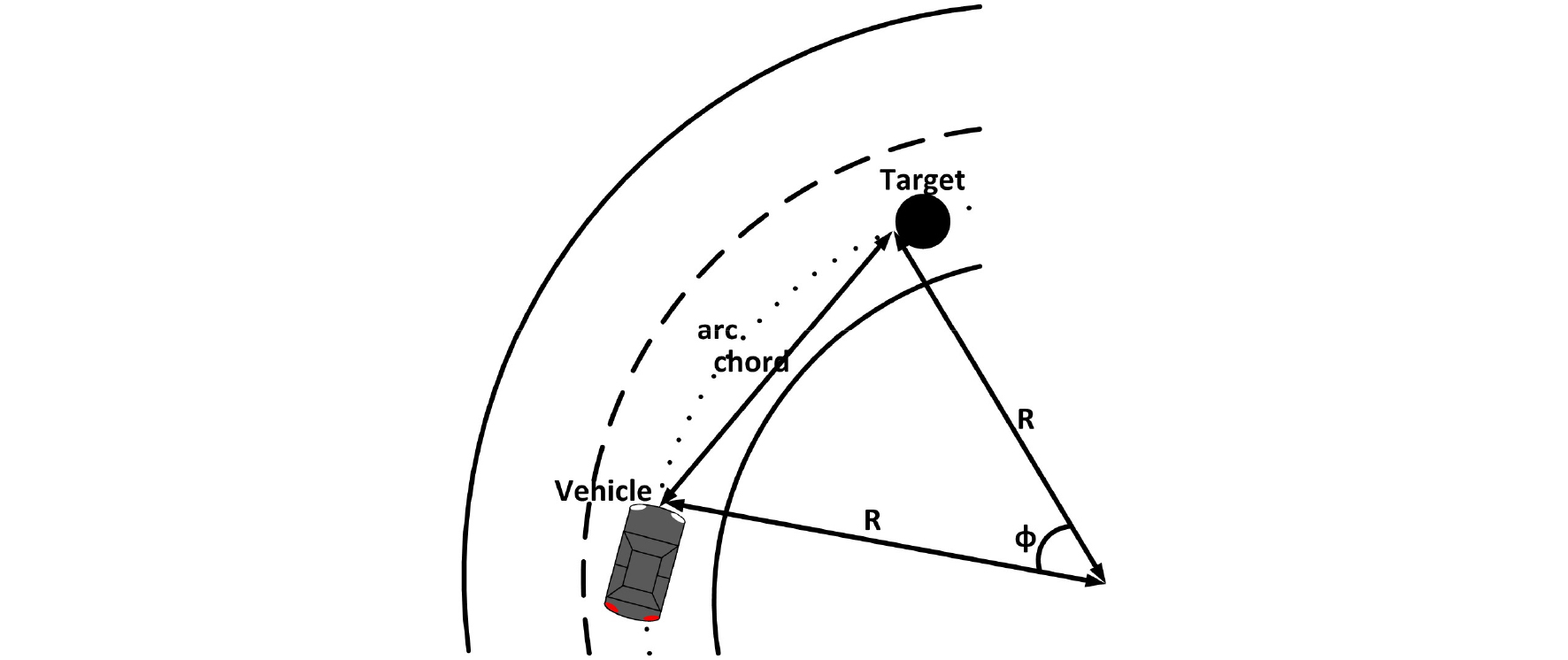
여기서, chord는 자동차와 물체 사이의 수직거리, Xg1, Zg1은 지면상에서 자동차의 x, y 좌표, Xg2, Zg2는 지면상에서 물체의 x, y 좌표이다.
전방물체까지의 수직거리를 현(chord)으로 가지는 부채꼴의 중심각 ϕ는 식 (5)와 같이 계산된다.
여기서, ϕ는 자동차와 물체 사이의 각도, R은 도로의 곡률반경이다.
부채꼴의 중심각 ϕ와 곡률반경 R을 이용하여 계산된 원의 호(arc)의 길이는 식 (6)과 같이 계산된다.
여기서, arc는 곡률반경을 고려한 자동차와 물체 사이의 거리이다.
곡선도로에서 전방물체까지의 거리는 곡률중심과 물체의 3차원 위치를 고려하였다.
도로의 곡률반경에 따라, 수식 2개를 제안하였다. 곡률반경이 1293m 이상일 때, 오차율이 0.1%가 된다. 그에 따라, 1293m을 기준점으로 제안한 수식을 통합하면, 식 (7)과 같이 표현이 가능하다.
여기서, Zt는 카메라부터 전방물체까지의 이론적 거리이다.
2.2. 시험 시나리오
선행연구에서, ISO 15622과 국내도로환경을 고려한 ACC의 시험 시나리오를 제안하였고, 본 연구에서는 이를 활용하였다. 제안한 ACC의 시험 시나리오는 4가지로 분류할 수 있다.
첫 번째는 Fig. 4와 같이, 감지 범위 평가에 대한 내용으로, 목표물 출현에 따른 센서의 감지 성능에 대해 구간으로 구분하였고, 구간에 대한 내용은 Table 2에 정리하였다.

Table 2.
Detection range scenario interval conditions
| No. | Detection range |
| 1 | front of a vehicle ∼ d0 (minimum relative distance) |
| 2 | d0 ∼ d1 (middle relative distance) |
| 3 | d0 ∼ dmax (maximum relative distance) |
두 번째는 Fig. 5의 (a)~(c)와 같이, 총 3개의 목표물 식별 시나리오이다. 목표물 식별 시험은 전방에 두 대 이상의 선행차량이 존재한다. 이때, 동일 차로 상의 선행차량을 목표차량으로 선택여부와 끼어들기 및 빠져나가기로 인한 목표물 변경시 목표물 식별 및 적절한 추종이 이루어지는지에 대한 평가를 한다.
Fig. 5(a)는 시나리오 1이며, 2대의 LV(Lead Vehicle)가 동일 속도로 나란히 주행하고 SV(Subject Vehicle)은 LV 1을 추종한다. 이때 같은 차선에 있는 LV 1이 가속하면 SV는 옆의 LV 2를 추종하지 않고 목표차량을 따라 가속하면서 LV 2를 지나치면 시험을 종료하는 시나리오이다.
Fig. 5(b)는 시나리오 2이며, 동일 차선에 2대의 LV가 나란히 주행하고 옆 차선에서 SV가 주행 중이다. 이때, LV 2가 가속하여 SV 앞으로 LV 1이 순간 가속으로 차선변경 후 설정속도로 감속한다. SV는 ACC에 의해 안전거리 확보를 위해 속도를 줄이며 LV 1을 추종하면서 종료되는 시나리오이다.
Fig. 5(c)는 시나리오 3으로, 같은 차선에서 2대의 LV가 주행하고, 뒤에서 SV가 추종 중이다. 이때, LV 2가 옆 차선으로 이동하면, SV는 LV 1을 추종하여 설정된 거리를 유지하면 종료되는 시나리오이다.
세 번째는 Fig. 5의 (d), (e)와 같이, 총 6개의 목표물 추종 평가 시나리오에 대한 내용이다. 이는 올바른 목표물을 식별하여 추종하는지를 판단하기 위한 시나리오이다.
Fig. 5(d)은 시나리오 4-7에 해당하는 그림이다. 시나리오 4, 5는, 같은 차선에서 SV가 전방에 주행 중인 LV 1을 추종 중이다. 이때, 옆 차선에서 주행 중인 LV 2가 SV 앞으로 차선 변경을 진행할 때, SV는 목표물을 LV 2로 변경하여 추종하면 종료하는 시나리오이다.
시나리오 6, 7은, 같은 차선에서 LV 1이 주행 중에 SV가 LV 1보다 10km/h 느리게 추종하여 주행 중이다. 이때, 옆 차선에서 LV 2가 SV 앞으로 차선을 변경하였을 때 SV는 목표물을 변경하여 LV 2에 대하여 추종하면 종료하는 시나리오이다.
Fig. 5(e)는 시나리오 8, 9에 해당하는 그림이다. 시나리오 8, 9는 옆 차선에 LV 1이 주행하고 있다. LV 1이 SV 앞으로 차선을 변경하였을 때, SV는 목표물을 인식하고 LV 1을 추종하면 종료되는 시나리오이다.
네 번째는 추가 시나리오로, Stop&Go와 곡선 선회 시나리오이다.
시나리오 10은 Stop&Go 시나리오로, Fig. 5(f)와 같다. 시내구간과 같이 잦은 감가속도의 변화가 있을 경우 SV가 이를 정상적으로 추종하는지 알기 위한 시험이다.
시나리오 11은 곡선 선회 시나리오로, Fig. 5(g)와 같다. SV가 LV를 추종할 때, 진입속도를 동일하게하고 속도에 따라서 곡선 반경이 달라질 경우에 대한 시험이다. 모든 시나리오의 설정조건은 Table 3에 정리하여 나타내었다.
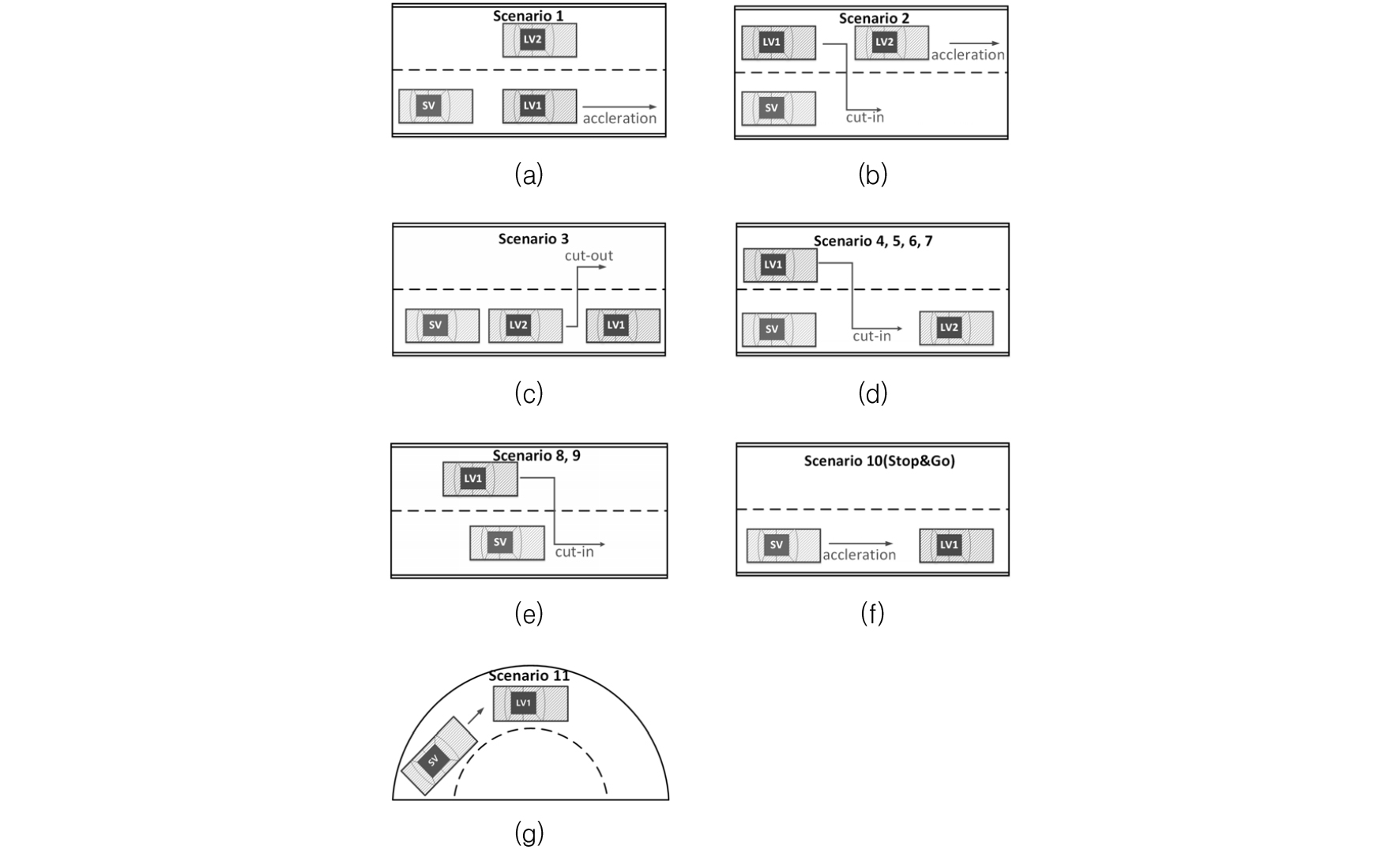
Table 3.
ACC test scenario conditions
3. 실차시험
3.1. 실차시험 차량
듀얼카메라를 이용한 ACC 평가방법의 검증과 ACC의 실제 기능 검증을 위하여, 실제도로 기반의 실차시험을 진행하였다. 실차시험의 대상차량은 H사의 제네시스 G90, 선행차량은 H사의 SONATA를 선정하였고, Fig. 6에 나타내었다.

대상차량을 H사의 제네시스 G90의 선정이유는, 카메라, 레이더, 초음파 등의 센서가 탑재되어, ACC, LKAS, AEB, HDA 시스템 등의 ADAS 기술 구현이 가능하다. 또한 ADAS 기능이 우수하다고 평가되고 있어 선정하였다.
3.2. 실차시험 장소
Fig. 7은 실제도로 기반의 실차시험을 위해 선정한 시험구간이다. 장소는 대구국가산업단지 내 일반도로(대구광역시 달성군 구지면)를 선정하였다. 선정이유는 보행자와 이륜차가 적은 산업공단 내 위치하였기 때문이다.

객관적인 시험결과의 취득을 위하여, 동일한 운전자, 장비, 장소에서 3회 반복 시험을 진행하였다. 실제도로에서 진행됨에 따라, 모든 시나리오는 복합적으로 연결되어 진행되었다. Table 4는 시험당시 환경이다.
Table 4.
Environmental condition
| Item | Condition |
| Road condition | flat, dry and clean asphalt or concrete |
| Temperature (℃) | 18.8 - 26.1 |
| Wind speed (m/s) | 1.6 - 1.7 |
| Weather | sunny |
3.3. 실차시험 조건
실제도로 기반의 실차시험을 실시하기 위한 선행 조건은 아래와 같이 가정하였다.
- ACC 기능을 위한 도로조건은 국토교통부에서 제공하는 교통용량편람을 따른다.
- 도로 폭은 3.5m를 넘지 않는다.
- ACC의 감속 능력은 차량 사용자 매뉴얼에 반드시 언급되어야 된다.
- ACC의 작동한계를 벗어나는 범위에서는 반드시 운전자가 조작하여야 한다.
실제도로에서 진행하는 실차시험은, 주변환경에 의해 반복재현이 현실적으로 어렵다. 하지만, 객관적인 결과의 취득을 위해, 동일한 운전자, 장비, 장소에서 3회 반복 시험을 진행하여, 외부의 변동요인을 최소화하였다.
실차시험의 ACC 속도는 시험도로의 제한속도인 50km/h 설정하였다. 시험차량의 거리 범위조절은 주변 차량에 이동에 영향을 줄이기 위하여 최소값으로 설정하였다.
Fig. 8은 시험 데이터를 취득하기 위해 장착한 장비이다. DGPS(Differential Global Positioning System, 이하 DGPS)와 DAQ(Data AcQuisition, 이하 DAQ) 등의 장비를 활용하였다. 장비 사양은 Table 5에 정리하였다.
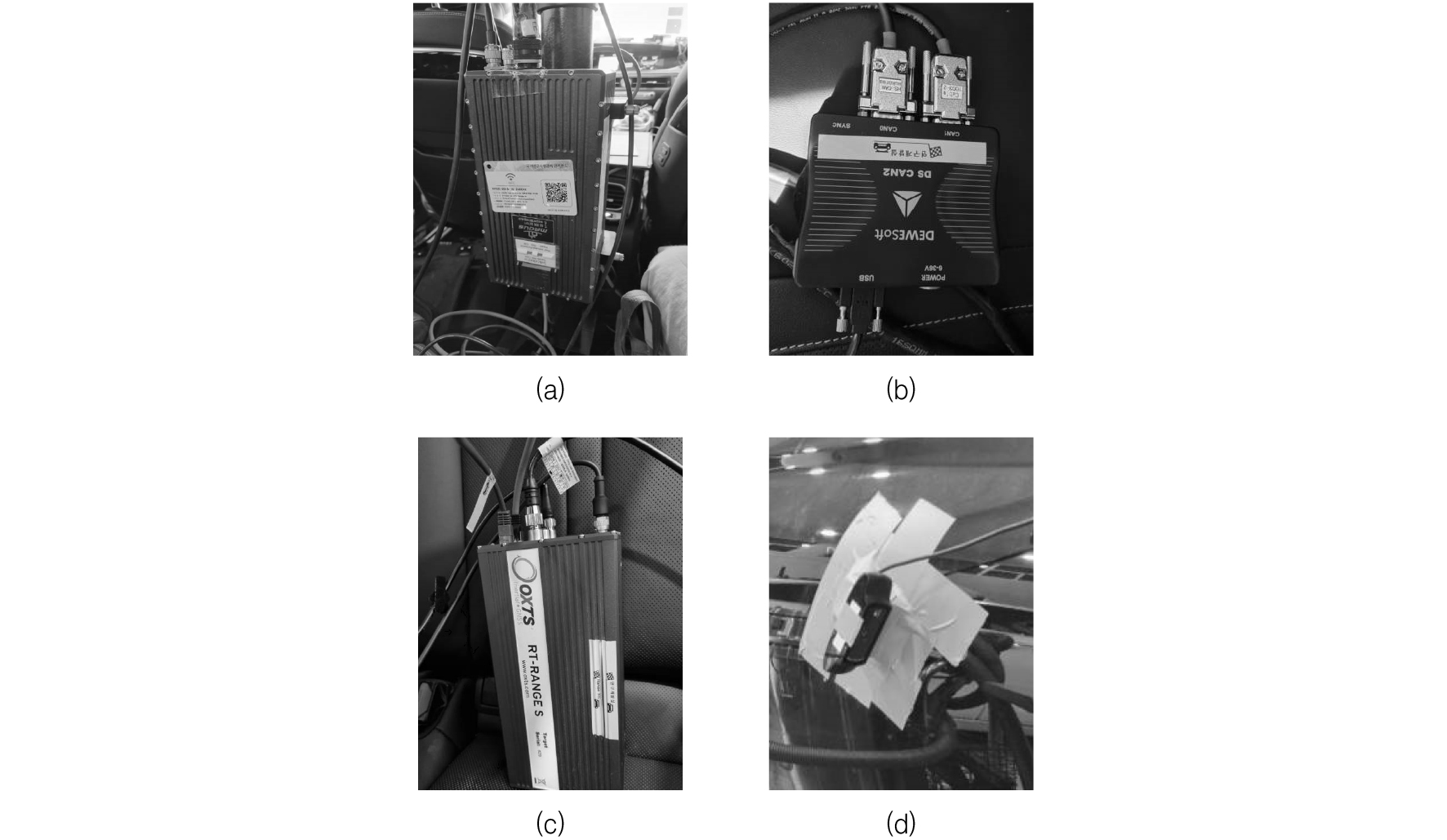
Table 5.
Measuring device spec.
Fig. 9는 듀얼카메라를 시험차량에 장착한 모습이다. 듀얼카메라는 웹캠 2대를 활용하였다. 장비사양은 Table 5의 webcam에 정리하였다.

4. 듀얼카메라를 활용한 시험결과 및 분석
4.1. 측정장비를 활용한 실차시험 결과
Fig. 10은 대구국가산업단지 내 일반도로에서 실시한 시험결과 중 시나리오에 해당하는 구간을 선정하여 나타낸 상대거리 결과이다. 시나리오 4-7은 Cut-in시험으로 안전사고의 위험 등으로 인해 진행하지 못하였다.
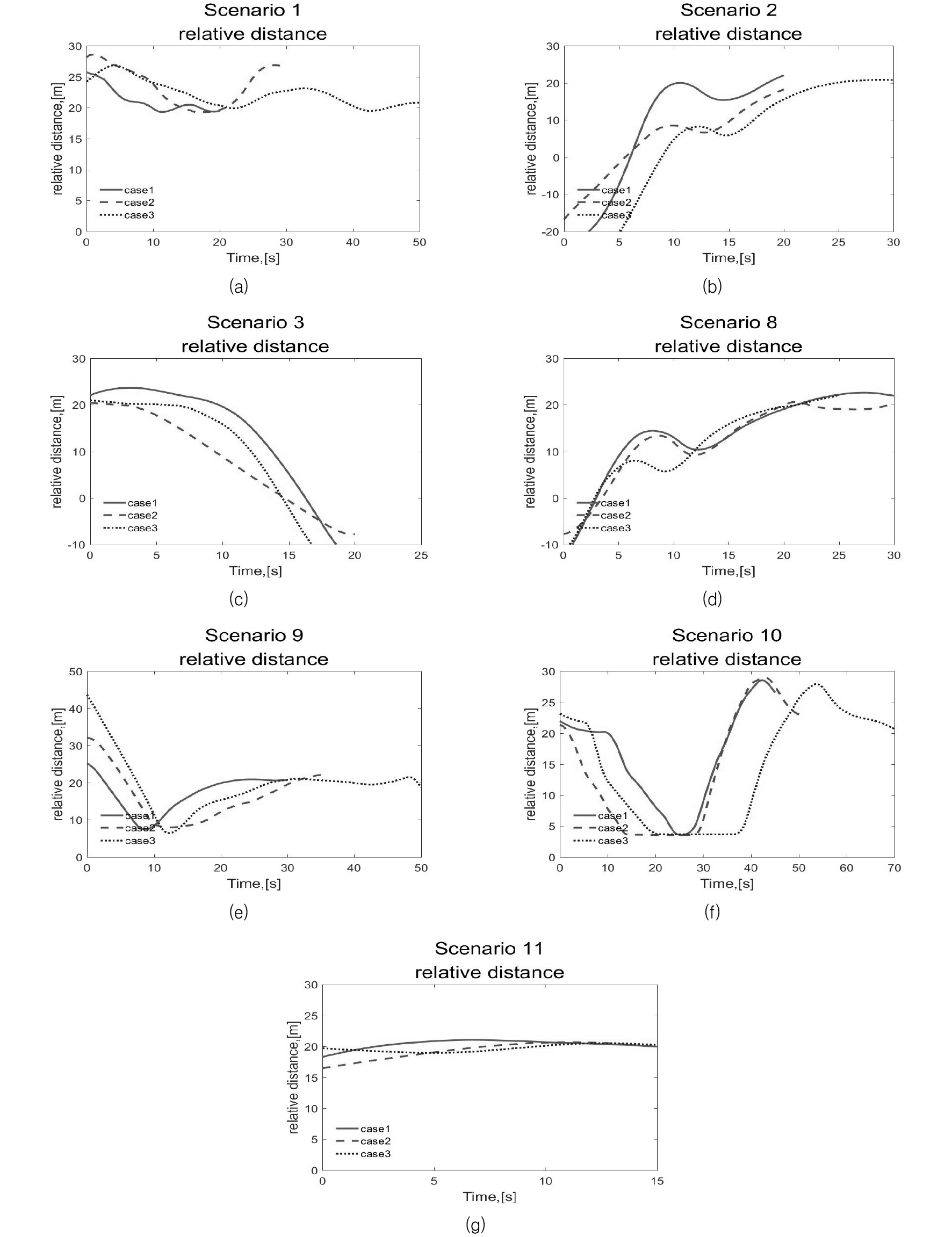
Table 6은 실차시험의 상대거리 결과이다. 결과는 ACC의 추종 기능이 안정화된 후의 결과 값이다.
Table 6.
Results of relative distance
4.2. 듀얼카메라를 활용한 실차시험 결과
시험 영상취득을 위하여, 듀얼카메라를 장착하고, 실차시험을 실시하였다.
Fig. 11은 Fig. 10에 해당하는 영상으로 취득한 결과이다. 결과는 제안한 거리측정 방법을 활용하였다.
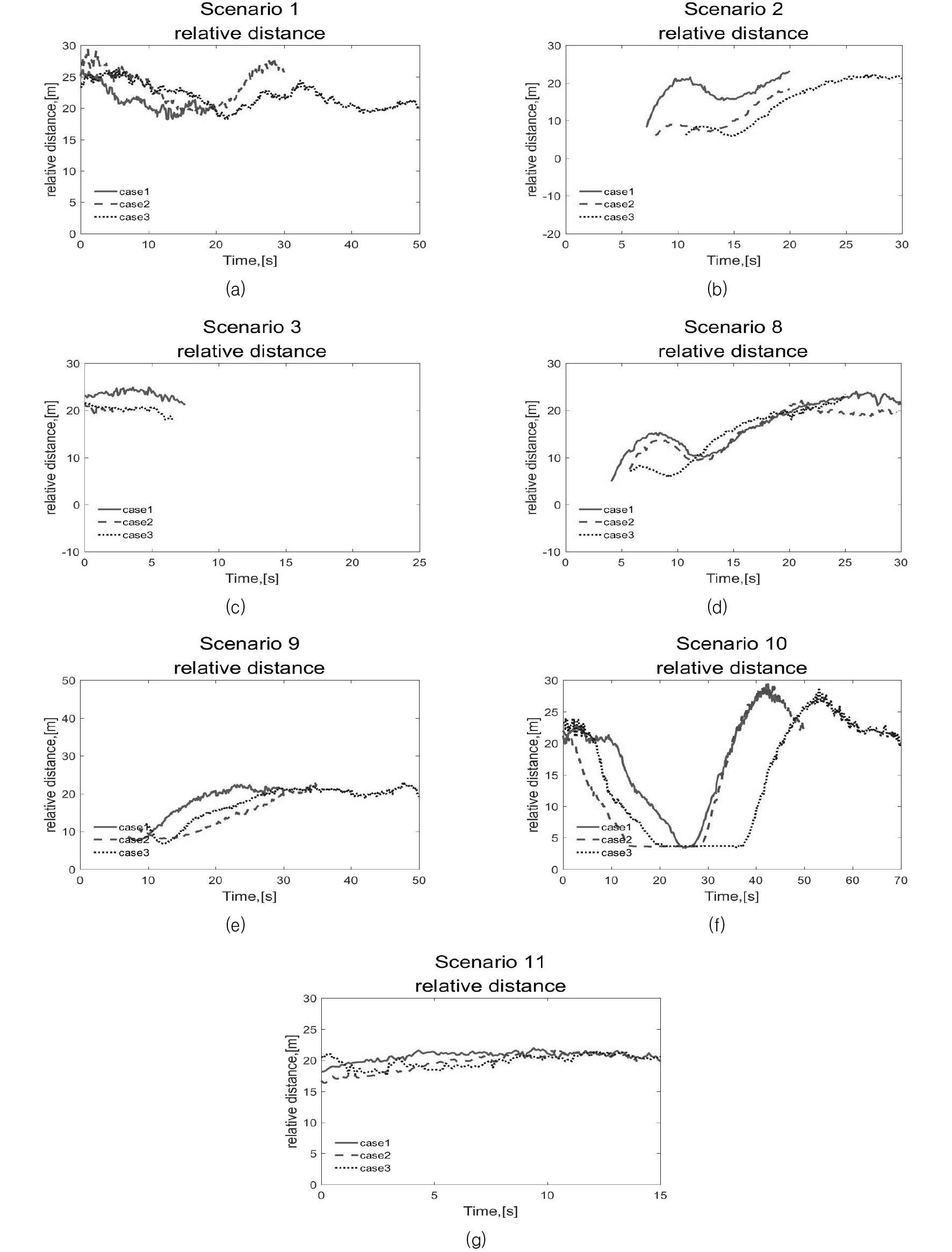
Table 6은 실차시험시 취득한 영상으로 취득한 결과이다. 상대거리 결과는 ACC 추종 기능이 안정화된 후의 결과 값이다.
계측 장비를 활용한 결과 값과 다르게 그래프가 끊어진 부분은 선행차량이 없기 때문이다.
4.3. 실차시험 결과 비교분석
ACC가 안정화된 상대거리 결과를 Table 7에 정리하였다. Table 7은 계측 장비를 활용한 결과와 듀얼카메라를 활용한 결과를 비교하였다.
Table 7.
Error rate comparison
안정화된 차간거리 데이터 오차율은 시나리오 8의 첫 번째 시험에서 최소 0.251%, 시나리오 9의 세 번째 시험에서 최대 4.202%로 나타났다. 이러한 오차는 동일한 운전자, 장비로 진행하였음에도, 주변 환경의 영향을 받은 것으로 판단하였다. 그리고, ACC의 안정화 과정에서 나타나는 오차로 판단되었으나, 시간에 따라 수렴하여 고려대상에서 제외하였다. 또한, 듀얼카메라를 활용한 결과는, 차량이 실제 거리보다 멀리 있는 것으로 계산되었다.
제한된 장소가 아닌, 실제도로에서 진행하는 실차시험의 특성상 예상하지 못한 환경이 구성될 수 있다.
본 연구에서는, Cut-in 후 주행신호에 의해 Stop&Go 기능이 동시에 진행된 결과가 발생하였다. 그에 대한 결과를 Fig. 12와 Table 8에 정리하였다.
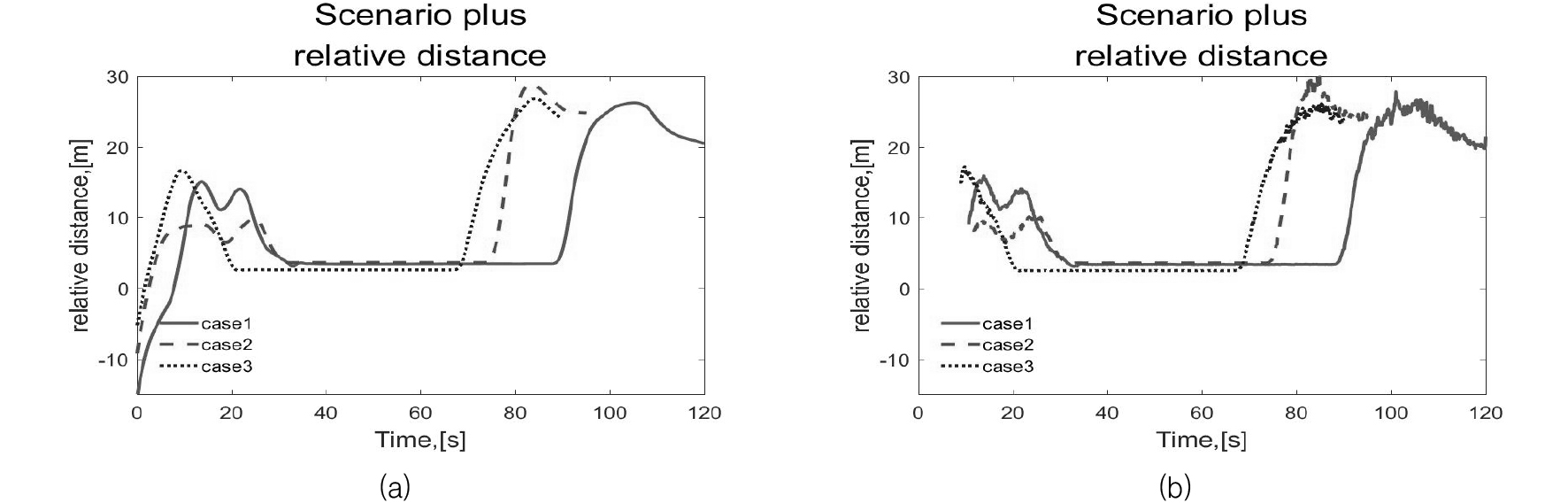
Table 8.
Comparison of additional scenario error factors (min, max, average)
| Scenario | Case | Result [%] | ||
| minimum | maximum | average | ||
| Cut-in& Stop&Go | 1 | 0.002 | 9.618 | 2.180 |
| 2 | 0.004 | 9.830 | 1.682 | |
| 3 | 0.038 | 9.189 | 2.596 | |
Table 9는 실차시험의 계측장비를 활용한 결과와 듀얼카메라를 활용한 결과를 비교한 오차율이다. 오차율은 동일한 시간의 결과를 비교하였다. 비교결과, 시나리오 10의 두 번째 테스트에서 최소 0.000%, 시나리오 1의 두 번째 테스트에서 최대 9.945%의 결과를 보였다. 하지만 모든 시나리오의 평균 오차율은 3% 이내로 나타났다.
Table 9.
Error rate comparison (min, max, average)
최대 오차의 대표적인 발생원인은, 시험차량에 설치된 듀얼카메라에서 발생한 것으로 판단하였다. 주행 중 발생하는 노면 진동과 공기저항에 의한 흔들림과 주변 밝기의 변화, 영상의 초점을 맞추는 과정 등의 문제점이 발생하였다. 그에 따라, 영상에서 선행차량까지의 거리를 계산한 결과가 부정확하게 계산된 것으로 판단하였다.
5. 결 론
본 논문에서는 듀얼카메라를 활용한 ACC 평가를 검증하기 위해, 제안한 평가 시나리오를 바탕으로 실차시험을 진행하였다. 그리고 듀얼카메라를 활용한 결과와 계측장비를 활용한 결과를 비교분석하였다. 그에 따른 결론을 도출하였으며, 결론을 요약하면 다음과 같다.
1) 선행연구에서 제안한 자동차 시험시, 듀얼카메라의 최적 설치 위치를 선정하였다. 또한 선행차량과의 거리측정 이론을 제안하였고, 이를 활용하였다.
2) ISO 15622과 국내도로 환경을 고려한 ACC 시험 시나리오를 바탕으로 실제도로에서 실차시험을 진행하였다.
3) 실제도로에서 진행한 실차시험은, 보행자와 이륜차가 적은 대구국가산업단지 내 일반도로에서 진행하였다. 시험 결과의 객관성 확보를 위해, 동일한 인원과, 장비, 장소에서 3회 반복시험을 진행하였으며, 시험차량은 H사의 제네시스 G90과 H사의 SONATA를 이용하였다. 대상차량을 제네시스 G90으로 선정한 이유는 센서기반의 ADAS 기술 구현이 가능하고, 기능이 우수하다고 평가되고 있기 때문이다. 시나리오 4-7은 Cut-in으로 인한 사고의 위험 등으로 인하여 진행하지 못하였다.
4) 각 시나리오의 시험결과는, 듀얼카메라를 활용한 결과 대비 계측장비를 활용한 결과를 비교하였다. 비교 결과 2가지의 결과를 도출할 수 있었다. 첫 번째 결과는, ACC의 안정화 과정 이후의 상대거리를 비교하였다. 안정화된 차간거리 데이터 오차율은 시나리오 8의 첫 번째 시험에서 최소 0.251%, 시나리오 9의 세 번째 시험에서 최대 4.202%로 나타났다. 두 번째 결과는, 동일한 시간의 결과를 비교하였다. 비교결과 시나리오 10의 두 번째 시험에서 최소 0.000%, 시나리오 1의 두 번째 시험에서 최대 9.945%로 나타났다. 하지만 모든 시나리오의 평균 오차율은 3% 이내로 나타났다.
5) 최대 오차의 대표적인 발생원인은, 시험차량에 설치된 듀얼카메라에서 발생한 것으로 판단하였다. 주행 중 발생하는 노면 진동과 공기저항에 의한 흔들림과 주변 밝기의 변화, 영상의 초점을 맞추는 과정 등의 문제점이 발생하였다. 그에 따라, 영상에서 선행차량까지의 거리를 계산한 결과가 부정확하게 계산된 것으로 판단하였다.
본 연구에서는 듀얼카메라를 활용한 ACC 시험의 가능성을 검증하기 위해, 듀얼카메라의 최적 위치 선정 결과와 거리 측정 방법, 국내도로 환경을 고려한 ACC 시나리오를 활용하였다.
그리고 시나리오 기반의 실제도로에서 실차시험을 진행하여 결과를 취득하였다. 결과의 비교분석 결과, 두 가지 결과를 도출할 수 있었다. 첫 번째, ACC의 안정화 과정 이후 결과는, 안정화된 차간거리 데이터 오차율은 시나리오 8의 첫 번째 시험에서 최소 0.251%, 시나리오 9의 세 번째 시험에서 최대 4.202%로 나타났다. 두 번째, 동일한 시간의 결과는, 시나리오 10의 두 번째 시험에서 최소 0.000%, 시나리오 1의 두 번째 시험에서 최대 9.945%로 나타났다. 하지만 모든 시나리오의 평균 오차율은 3% 이내로 나타났다.
현재, 양산되는 자동차에 적용된 ACC는 레이더, 카메라 등의 센서를 기반으로 구현되고 있다. 레이더, 라이더와 같은 고가의 센서로 인하여 비용부담이 큰 단점이 있다. 하지만, 위의 결과를 바탕으로 듀얼카메라만을 활용한 ACC 시험 가능성을 확인하였다고 판단하였다. ACC와 같은 ADAS의 개발단계에서 듀얼카메라만으로도 시험이 결과의 도출로 인하여 비용부담을 감소시킬 가능성이 있다고 판단된다.
향후, 시험하지 못한 시나리오 4-7의 진행이 필요하다. 또한, 출근 및 퇴근 시간의 복잡한 교통환경의 검증이 필요할 것으로 판단된다. 그리고, 눈과 비 같은 악천후 날씨에 대한 시험이 필요할 것으로 판단된다.
