

1. 서 론
2. 국내 V2X 통신 기술 및 C-ITS 사업 현황
2.1. V2X 통신 기술 동향
2.2. 국내 C-ITS 실증사업 현황
2.3. 국내 C-ITS 안전 서비스 동향
3. KNCAP의 V2X 평가 항목
4. KNCAP의 평가 환경 및 평가시스템
5. KNCAP 평가 항목의 평가 방법
5.1. 급감속 자동차 경고 서비스
5.2. 정지 자동차 경고 서비
5.3. 교차로 충돌 경고 서비스
5.4. 신호 위반 경고 서비스
5.5. 보행자 충돌 경고 서비스
6. 결 론
1. 서 론
V2X(Vehicle-To-Everything) 통신 기술은 첨단운전자보조시스템(ADAS) 센서의 인식 범위를 넘어서 주변 교통상황 및 도로 위험 상황 등을 인지하여 기존 Lv.3 자율자동차의 한계를 극복할 수 있으며 Lv.4 이상의 자율주행을 구현하기 위한 핵심 기술로 그 필요성이 점차 대두되고 있다.
특히 V2X 통신 기술을 활용하여 원거리 위험 상황에 대한 정보를 수신하여 충돌 회피 또는 사고 예방을 위한 차량 제어를 할 수 있는 시간을 확보할 수 있어 사고 예방 안전성 측면에서 V2X 통신 기술의 중요성이 부각되고 있는 상태이다.
우리나라는 2014년 7월부터 국토교통부에서 V2X 통신 기술 중에 하나인 WAVE(Wireless Access in Vehicular Environments) 기술을 기반으로 C-ITS(차세대 지능형교통체계, Cooperative-Intelligent Transport Systems) 확대 조성을 위한 기술·서비스 개발 및 검증, 인프라 구축, 표준·인증체계 마련, 법제도 정비 등을 목표로 C-ITS 시범사업을 추진하였다.
이를 기반으로 각 지자체에서도 교통 혼잡 등으로 인한 교통 환경 악화, 기상 악화로 인한 교통사고 발생 감소 기반 조성, 스마트 도로 협력 인프라 구축, 자율주행 지원하기 위해 C-ITS 실증사업을 추진한 바 있다.
C-ITS 실증사업을 통해 다양한 안전 서비스들이 개발되고 V2X 통신 기술의 안전성이 검증되고 있으며 한국판 뉴딜 정책의 일환으로 2030년까지 고속도로를 포함한 전국 주요 도로에 C-ITS 인프라가 구축될 예정이다.
세계 주요 국가(유럽, 중국, 일본)에서는 V2X 기술을 활용한 사고 예방 안전성에 주목하여 자동차안전도평가(NCAP, New Car Assessment Program) 로드맵을 수립하여 V2X 기술에 대해 NCAP 평가 항목으로 도입하고 있다.
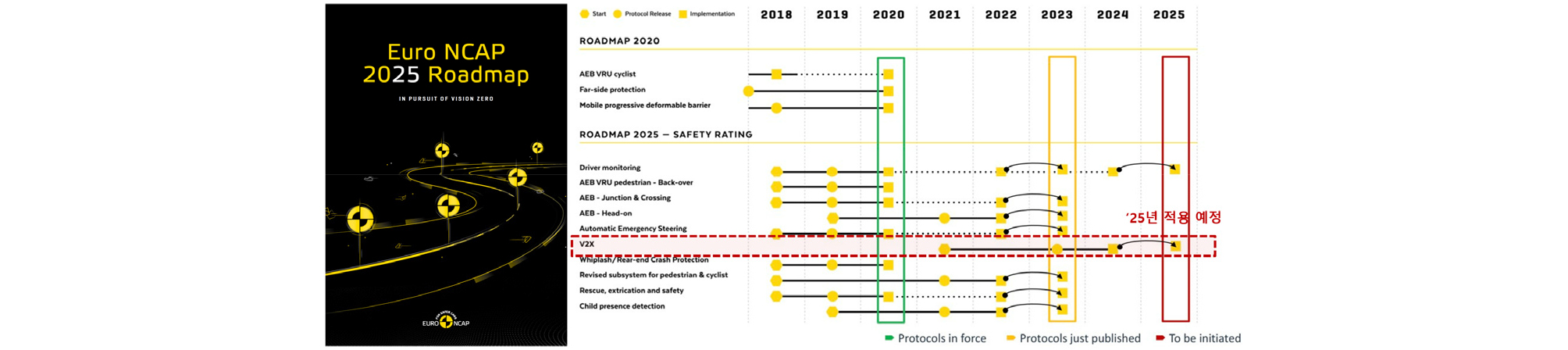
특히 유럽은 C-ITS와 관련된 V2X 서비스가 차량 안전도를 향상시킬 수 있는 안전 기술로써의 중요성을 인지하고 NCAP 평가 항목으로 V2X가 포함된 ‘Euro NCAP 2025 Roadmap’를 2017년에 Fig. 1과 같이 발표하였다.
V2X와 관련된 국내 C-ITS 구축 상황과 국제적인 흐름에 발맞춰 우리나라도 V2X 통신 기술 관련하여 제작사의 기술개발 및 V2X 통신장치 장착을 유도하고 제작차의 안전도 향상을 위한 제도화 방안으로 국내 자동차안전도평가(KNCAP) 평가 항목 도입을 결정하였으며, 2025년부터 시행하기 위해 한국교통안전공단은 관련 연구를 진행하고 있다.
본 연구에서는 국내 자동차안전도평가(KNCAP)에 V2X 통신장치를 평가 항목으로 도입 시 자동차에 장착되어 있는 V2X 통신장치의 성능평가를 위한 평가 항목, 평가 환경 및 평가 방법 등 자동차 V2X 통신 성능 안전성 평가기술 개발에 관한 연구를 진행하였다.
2. 국내 V2X 통신 기술 및 C-ITS 사업 현황
2.1. V2X 통신 기술 동향
현재 전세계적으로 V2X 통신기술은 Table 1에서 보듯이 IEEE 802.11p 표준 그룹에서 개발한 무선랜 기반의 WAVE 통신기술과 3GPP 표준 그룹에서 개발한 셀룰러 통신 기반의 C-V2X(Cellular-V2X) 통신기술이 공존하고 있는 상황이다. 두 통신방식은 동일한 서비스 어플리케이션을 위해 사용되면서도 서로 호환되지 않아 둘 중 하나의 통신방식을 선택해야 하는 상황이며, 이를 위해 각 국가별로 V2X 통신기술 선택을 위한 다양한 논의와 실험이 진행되고 있다.
Table 1.
V2X communication technology feature comparison
| 항목 | WAVE | C-V2X |
| 표준 | IEEE 802.11p | 3GPP Rel. 14 이상 |
| 표준화 시점 | 2010 | 2016 |
| 통신 기술 | 무선랜(DSRC) | 셀룰러(LTE-V2X, 5G-NR) |
| 통신 용량 | 낮음(상대적) | 높음(상대적) |
| 실증(신뢰성확보) | ○ | × |
국내에서는 2014년부터 정부·지자체를 통해 다양한 지역에서 WAVE 통신기술 기반 C-ITS 실증사업을 진행하였으나, 2023년 12월 ‘C-ITS 단일 통신방식 결정 전문가 위원회’가 차세대 지능형교통체계(C-ITS)를 위한 통신방식으로 LTE-V2X를 최종적으로 결정함으로써, 현재는 해당 기술에 맞게 기술기준 개정 및 실증 테스트를 진행하고 있으며 중요도가 높은 도로부터 단계적으로 C-ITS 인프라를 구축해 나갈 계획이다.
2.2. 국내 C-ITS 실증사업 현황
국내에서는 2014년 대전-세종 시범사업을 시작으로 2022년까지 주요 도시(서울, 제주, 광주, 울산) 및 고속도로 C-ITS 실증사업이 추진되었다.
Table 2와 같이 7개 실증 사업지에 V2X 단말기(OBU) 약 13,000여대, 노변기지국(RSU) 약 1,200개소 설치와 총 68개 서비스(공통 15개, 특화 53개)를 제공 중이다. 공통 서비스는 사업별로 제공하는 서비스 내용이 유사한 서비스이며, 특화 서비스는 사업별로 지역 특성을 고려하여 자체적으로 개발하고 제공하는 서비스를 의미한다.
Table 2.
Status of domestic C-ITS demonstration projects
2.3. 국내 C-ITS 안전 서비스 동향
C-ITS 시범사업 및 각 지자체 실증사업을 통해 다양한 안전 서비스가 개발되었으며, C-ITS 필수서비스를 기반으로 서비스별로 기능 요구사항을 분석하여 Table 3과 같이 총 11개의 공통 서비스로 분류하였다.
Table 3.
Domestic C-ITS common safety services
3. KNCAP의 V2X 평가 항목
국내 C-ITS 공통 서비스로 도출된 11개 항목을 KNCAP 평가 항목으로 적용할 때 적용 순서 또는 항목별 점수 차등 부여 시 기준 지표로 사용하기 위해 우선순위를 선정할 필요가 있으며, 도입을 위한 우선순위를 선정 하기 위해 각 서비스 항목과 연관성 있는 도로교통공단 교통사고분석시스템의 교통사고 통계자료를 조사하여 분석하였다.
우선순위 선정을 위해 서비스와 관련된 교통사고 통계자료가 있는 항목과 없는 항목으로 구분하여 순위를 정하였으며, 교통사고 통계자료가 있는 항목들은 자동차 교차로 안전주행 지원 서비스, 교차로 보행자 충돌방지 경고 서비스, 기상 및 노면상태 제공 서비스, 자동차 추돌방지 지원 서비스, 제한속도 알림 서비스, 위험물 차량 알림 서비스이며 최근 5년간(2016~2020) 통계자료를 분석하였다.
다만 보행자 교차로 관련 교통사고 통계는 최근 3년간(2018~2020) 자료만 제공되고 있어 우선순위 선정을 위해 2018년~2020년의 통계자료만 비교 분석하였다.
도로작업구간 알림 서비스, 자동차 긴급상황 알림 서비스, 도로 위험구간 알림 서비스, 위치기반 교통정보 수집·제공 서비스, 긴급자동차 접근 알림 서비스는 관련된 통계자료가 제공되고 있지 않아 통계자료가 있는 서비스들보다 후순위로 선정하였다.
2018~2020년의 각 서비스별로 관련성 있는 사고 건수, 부상자 수, 사망자 수의 합은 Table 4와 같다.
Table 4.
Overall traffic accident status
안전 서비스의 주의·경고 알림을 통해 위험 상황을 미리 인지하고 안전 운전을 유도함으로써 사고를 예방하기 위한 목적이 크기 때문에 우선순위 선정을 위해서 교통사고 통계자료 구분 항목 중 우선순위 선정을 위한 지표로 사고 건수, 치사율, 부상자 수(사고 건수 100건당)를 사용하였으며, 각 항목별 통계자료 수치가 높은 순서대로 1위부터 6위까지 분류하고 순위가 높은 순서대로 6점부터 1점까지 점수를 부여하였다.
사고 건수는 Table 5와 같이 자동차 교차로 > 추돌 > 위험물 차량 > 기상·노면 > 보행자 교차로 > 과속 순으로 발생 건수가 많았다.
Table 5.
Traffic accident number status
| 구분 | 합계 | 자동차 교차로 | 보행자 교차로 | 기상·노면 | 추돌 | 제한속도(과속) | 위험차량 |
|
사고건수 (건) |
656,276 (100.0%) |
324,625 (49.5%) |
52,230 (8.0%) |
69,981 (10.7%) |
104,589 (15.9%) |
3,315 (0.5%) |
101,536 (15.5%) |
| 순위 | - | 1 | 5 | 4 | 2 | 6 | 3 |
| 점수 | - | 6 | 2 | 3 | 5 | 1 | 4 |
치사율은 Table 6과 같이 과속 > 위험물 차량 > 보행자 교차로 > 기상·노면 > 추돌 > 자동차 교차로 순으로 높았다.
Table 6.
Status of fatal traffic accidents
| 구분 | 합계 | 자동차 교차로 | 보행자 교차로 | 기상·노면 | 추돌 | 제한속도(과속) | 위험차량 |
|
치사율 (명) |
32 (100.0%) |
1.09 (3.4%) |
2.82 (8.7%) |
2.27 (7.0%) |
1.1 (3.4%) |
22.38 (68.9%) |
2.82 (8.7%) |
| 순위 | - | 6 | 3 | 4 | 5 | 1 | 2 |
| 점수 | - | 1 | 4 | 3 | 2 | 6 | 5 |
사고 건수 100건당 부상자 수는 Table 7과 같이 추돌 > 과속 > 자동차 교차로 > 위험물 차량 > 기상·노면 > 보행자 교차로 순으로 많았다.
Table 7.
Traffic accident status by number of injured people per 100 accidents
| 구분 | 합계 | 자동차 교차로 | 보행자 교차로 | 기상·노면 | 추돌 | 제한속도(과속) | 위험차량 |
|
사고건수 100건당 부상자수 |
918 (100.0%) |
150.66 (16.4%) |
101.89 (11.1%) |
150.13 (16.3%) |
186.48 (20.3%) |
179.67 (19.6%) |
149.64 (16.3%) |
| 순위 | - | 3 | 6 | 4 | 1 | 2 | 5 |
| 점수 | - | 4 | 1 | 3 | 6 | 5 | 2 |
최종 순위 선정을 위해 각 항목별로 가중치를 적용하였으며 적용 기준은 다음과 같다.
• 사고 건수 : 0.5 (안전 서비스를 통한 사고 예방 목적)
• 치사율 : 0.3 (사고 발생 시 사망자를 줄이기 위한 목적)
• 부상자 수 : 0.2 (사고 발생 시 부상자를 줄이기 위한 목적)
각 항목별 가중치와 점수를 곱하여 최종 점수를 산출하고 점수가 높은 순서대로 Table 8과 같이 최종 순위를 선정하였다.
Table 8.
Scores and rankings for items with statistical data
| 구분 | 자동차 교차로 | 보행자 교차로 | 기상·노면 | 추돌 | 제한속도(과속) | 위험차량 |
| 사고건수 순위 (0.5) | 6 | 2 | 3 | 5 | 1 | 4 |
| 치사율 순위 (0.3) | 1 | 4 | 3 | 2 | 6 | 5 |
|
사고건수 100건당 부상자수 순위 (0.2) | 4 | 1 | 3 | 6 | 5 | 2 |
| 가중치 합계 | 4.1 | 2.4 | 3.0 | 4.3 | 3.3 | 3.9 |
| 순위 | 2 | 6 | 5 | 1 | 4 | 3 |
관련된 교통사고 통계자료가 없는 안전 서비스 항목은 자료를 통한 비교가 어렵기 때문에 통계자료가 있는 항목보다 후순위를 부여하였으며, 서비스 항목의 우선순위를 선정하기 위한 기준은 다음과 같다. 각 질문에 대해 발생 가능성이 높으면 3점, 보통이면 2점, 낮으면 1점으로 부여하였다.
• ① 서비스 알림이 제공되지 않을 때, 직접·간접적인 충돌로 인한 사고 발생 가능성이 높은가?
• ② 서비스 알림이 제공되지 않을 때, 돌발 사고 위험이 높은가?
• ③ 서비스 알림이 제공되지 않을 때, 차대 사람 또는 차대차 사고 가능성이 높은가? (1차 사고 기준)
Table 9에서 보듯이 항목①은 해당 안전 서비스가 제공되지 않아 사고가 발생할 때 직접적인 충돌 또는 간접적인 충돌로 인해 사고 발생 가능성에 대해 점수를 부여하였다.
Table 9.
Scores and rankings for items without statistical data
| 구분 | 작업구간 알림 | 위치정보 수집·제공 | 긴급차량 알림 | 차량 긴급상황 | 위험구간 알림 |
| ① | 3 | 2 | 2 | 3 | 1 |
| ② | 1 | 1 | 2 | 3 | 1 |
| ③ | 3 | 1 | 2 | 2 | 3 |
| 점수 | 7 | 4 | 6 | 8 | 5 |
| 순위 | 8 | 11 | 9 | 7 | 10 |
작업구간알림(도로 작업구간 알림서비스), 차량긴급상황(자동차 긴급상황 알림 서비스)의 경우 직접적인 사고를 예방하는 것이 주 목적이기 때문에, 직접적인 충돌로 인한 사고 발생 가능성이 높아 3점을 부여하였으며, 위치정보 수집·제공(위치기반 교통정보 수집·제공 서비스)와 긴급차량알림(긴급자동차 접근 알림 서비스)의 경우 사고 발생 가능성이 상대적으로 낮아 2점을 부여하였다.
위험구간알림(도로 위험구간 알림 서비스)의 경우 실시간 위험 상황이 아니라 과거 사고 발생 결과로 인해 사고 다발 구간으로 지정되었기 때문에 실질적인 충돌 위험성은 낮다고 판단하여 1점을 부여하였다.
항목②는 서비스 알림이 제공되지 않을 때, 돌발 사고 위험성이 높은 항목 순으로 점수를 부과하였다. 차량긴급상황의 경우 차량긴급 상황의 발생이 돌발 상황이기 때문에 돌발 사고 위험성이 높아 3점을 부여하였으며, 긴급차량알림의 경우 사이렌 소리로 주변에 긴급차량이 있다는 것을 알려주지만, 빠른 속도로 주행하고, 신호위반이 잦기 때문에 주변 차량 관점에서 돌발 사고가 발생할 확률이 높다고 판단하여 2점을 부여하였다.
작업구간은 도로 작업구간 전방 200 m 앞에서부터 공사구간 전용 지시표시, 공사구간 수신호 등을 통해 작업구간을 미리 안내하므로 돌발 상황이 아니라 판단되어 1점, 위치정보와 위험 구간은 돌발 상황과는 연관성 낮다고 판단하여 1점을 부여하였다.
항목③은 서비스 알림이 제공되지 않을 때, 차대 사람 또는 차대차 사고 가능성이 높은 순으로 높은 점수를 부여하였다. 차대 사람과 차대차 사고 두 가지 모두 해당하면 3점, 둘 중 1가지만 해당하면 2점, 해당은 되지만 가능성이 낮은 항목은 1점을 부여하였다.
교통사고 통계자료 및 상황별 사고 발생 가능성을 분석한 결과 최종 순위표와 공통 서비스 항목별 최종 순위는 Table 10과 같다.
Table 10.
Ranking table reflecting traffic accident statistics
KNCAP은 자동차 제작사에게 V2X 통신장치 장착을 유도하고 제작차의 안전도 향상을 목적으로 하므로 V2X 통신장치 장착이 없이도 현재 자동차 제작사에서 이동통신망을 활용한 V2N 방식으로 제공할 수 있는 안전 서비스들은 KNCAP 평가 항목에서 제외하였다.
따라서 우선순위가 높고 V2X 통신 장착이 반드시 필요한 안전 서비스인 자동차 추돌방지 지원 서비스, 자동차 교차로 안전주행 지원 서비스 및 교차로 보행자 충돌방지 경고 서비스를 선정하였으며, 특히 자동차 추돌방지 지원 서비스 경우에는 직선로와 교차로 시나리오로 상세하게 구분하였다.
본 연구에서는 Table 11과 같이 최종 KNCAP 평가 항목으로 급감속 자동차 경고 서비스, 정지 자동차 경고 서비스, 교차로 충돌 경고 서비스, 신호 위반 경고 서비스, 보행자 충돌 경고 서비스의 5개 항목을 선정하였다.
Table 11.
Final KNCAP evaluation items selection
급감속 자동차 경고 서비스, 정지 자동차 경고 서비스 및 교차로 충돌 경고 서비스 서비스는 V2V(Vehicle-to-Vehicle) 메시지 통해 서비스를 제공하며, 신호 위반 경고 서비스와 보행자 충돌 경고 서비스는 I2V(Infrastructure-to-Vehicle) 메시지를 통해 서비스를 제공하게 된다.
4. KNCAP의 평가 환경 및 평가시스템
KNCAP 평가 항목으로 도출한 5개의 서비스를 평가하기 위한 평가 환경은 Table 12와 같이 급감속 자동차 경고 서비스와 정지 자동차 경고 서비스는 2차선 이상의 직선로 환경에서 실차 평가를 수행할 수 있어야 하며, 차량간 통신은 최소 300 m(반경)인 것을 고려할 때 KNCAP 평가 환경은 길이가 최소 500 m 이상 직선로 환경이 필요하지만, 가속 및 감속 구간을 고려하면 최소 1 km 이상의 직선로가 필요하다.
Table 12.
Definition of evaluation environment by evaluation item
| KNCAP 평가항목 | 평가환경 |
| 급감속 자동차 경고 서비스 | 직선로, 고속주행로, 종합시험로 등 |
| 정지 자동차 경고 서비스 | |
| 교차로 충돌 경고 서비스 | 신호교차로, 도심 교차로등 |
| 신호 위반 경고 서비스 | |
| 보행자 충돌 경고 서비스 |
교차로 충돌 경고 서비스, 신호 위반 경고 서비스 및 보행자 충돌 경고 서비스는 약 100 m 이상의 교차로 환경이 필요하다.
한국교통안전공단 자동차안전연구원에는 Fig. 2와 같이 주행시험장 내에 2차선 이상의 직선로(약 1.8 km), 고속주행로, 종합시험로가 있으며, K-City(자율주행 실험도시) 내에는 신호교차로, 도심 교차로, 고속주행로가 구축되어 있어 5개 안전 서비스에 대한 실차 평가가 진행이 가능하다.

KNCAP 평가 항목 시험을 위해 사용되는 기준 평가시스템의 주요 기능 및 요구사항은 SAE J2945/1/1A와 J3161/1/1A 표준을 분석하여 도출하였으며 Fig. 2 및 Table 13과 같다.
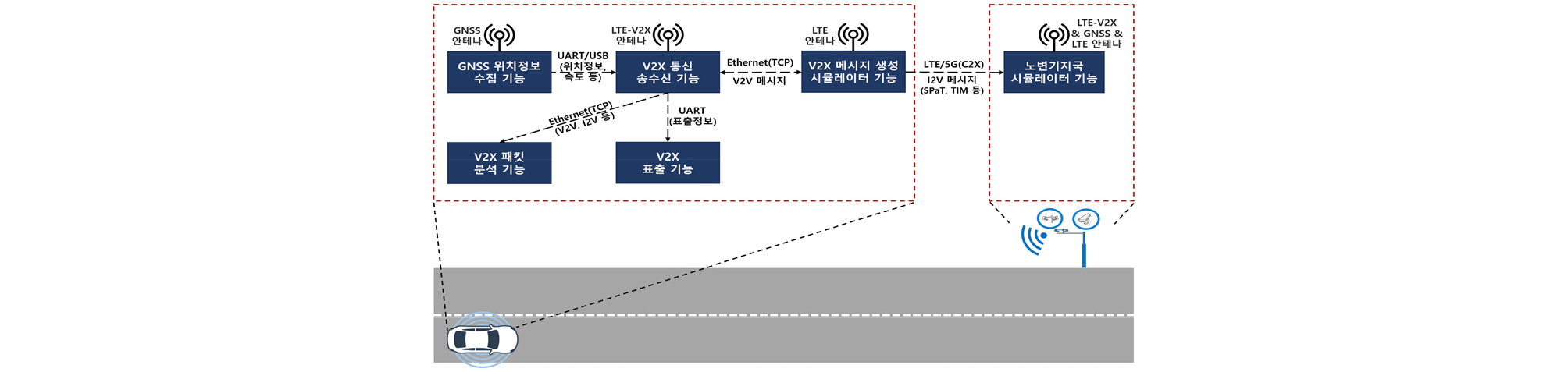
Table 13.
Criteria evaluation system requirements
5. KNCAP 평가 항목의 평가 방법
각 KNCAP 평가 항목별 평가 방법은 국내외 표준, 해외 NCAP 진행 현황 및 국내외 실증사업을 참조하여 도출하였다. 아래 평가 방법에서 대상자동차란 V2X 통신장치가 장착되어 그 성능을 평가하기 위한 자동차를 말하며, 전방자동차, 주차자동차와 목표자동차는 시험 차량을 말한다. 목표자동차는 V2X 통신장치가 장착되어 있으며, 전방자동차와 주차자동차는 V2X 통신장치가 장착되어 있지 않다.
평가를 시작하기 전에 대상자동차와 목표자동차의 V2X 통신장치가 전송하는 자동차 안전 기본 메시지(BSM)와 교차로 신호현시 및 보행자 통행 정보를 포함한 교통신호메시지(SPaT)와 지도메시지(MAP)를 정상적으로 수신하는지 확인하며, 자동차 안전 기본 메시지(BSM)에 표시된 좌표가 대상자동차와 목표자동차의 현재 위치가 수평 측위 오차범위 1.5m 이내인지 확인한다.
5.1. 급감속 자동차 경고 서비스
5.1.1. 급감속 메시지 수신 기능

• 대상자동차, 전방자동차 및 목표자동차는 동일 주행 방향, 동일 주행차로, 자동차간 목표 거리에 맞춰 목표 시작점에 위치한다.
• 대상자동차, 주행자동차, 목표자동차는 시작점에서 목표 주행속도까지 가속하여 속도를 충분히 안정시킨다.
• 목표자동차는 목표 위치에서 급감속하고, 급감속 이벤트(eventHardBraking) 정보가 포함된 자동차 안전 기본 메시지(BSM)를 전송한다.
• 대상자동차가 알림 기준에 따라 경고 메시지를 표출하는지를 확인한다.
• 대상자동차가 급감속 이벤트에 대한 경고 알림을 표출하거나 전방자동차가 정지하면 시험을 종료한다.
5.1.2. 급감속 메시지 송신 기능

• 대상자동차는 목표 시작점에 위치한다.
• 대상자동차는 시작점에서 목표 주행속도까지 가속하여 속도를 충분히 안정시킨다.
• 대상자동차는 목표 위치에서 급감속하고, 급감속 이벤트(eventHardBraking) 정보가 포함된 자동차 안전 기본 메시지(BSM)를 전송해야 한다.
• 기준 평가시스템에서 대상자동차의 급감속 이벤트 정보가 포함된 자동차 안전 기본 메시지(BSM)가 수신되었는지를 확인한다.
• 대상자동차가 정지하면 시험을 종료한다.
5.2. 정지 자동차 경고 서비스

• 대상자동차, 전방자동차는 동일 주행 방향, 동일 주행차로, 자동차간 목표 거리에 맞춰 목표 시작점에 위치한다. 목표자동차는 동일 주행방향, 동일 주행차로와 시작점에서 목표 지점에 위치한다.
• 목표자동차는 정지상태에서 자동차 안전 기본 메시지(BSM)을 전송한다.
• 대상자동차와 전방자동차는 시작점에서 목표 주행속도까지 가속하여 속도를 충분히 안정시킨다.
• 대상자동차와 전방자동차는 차간 목표 거리와 목표 주행속도 유지하면서 목표자동차를 향해 주행한다.
• 대상자동차가 알림 기준에 따라 경고 메시지를 표출하는지를 확인한다.
• 전방자동차는 목표자동차와의 거리가 목표 지점에 도달하면 좌측 차선으로 이동한다.
• 대상자동차는 목표자동차와의 거리가 목표 지점에 도달하면 정지하며 시험을 종료한다.
5.3. 교차로 충돌 경고 서비스
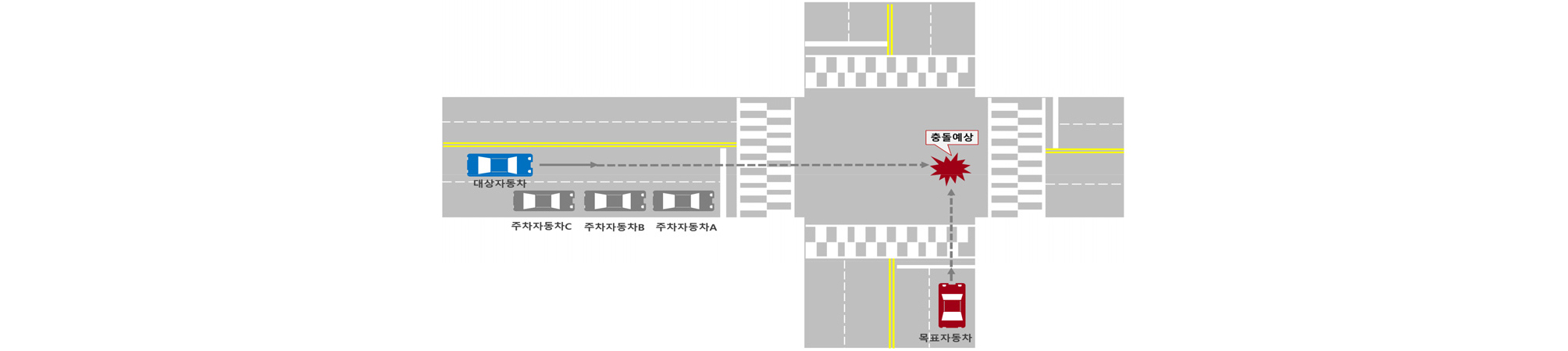
• 대상자동차와 목표자동차는 위의 그림과 같이 위치하며, 시작점은 교차로 진입로 정지선으로부터 목표 지점에 각각 위치한다.
• 주차자동차A, 주차자동차B 및 주차자동차C는 위의 그림과 같이 위치한다.
• 대상자동차와 목표자동차는 시작점에서 목표 주행속도까지 가속하여 속도를 충분히 안정시킨다.
• 대상자동차와 목표자동차는 목표 주행속도를 유지하도록 주행하며, 각 자동차가 동시에 교차로에 진입하도록 한다.
• 대상자동차가 알림 기준에 따라 경고 메시지를 표출하는지를 확인한다.
• 대상자동차는 목표자동차와의 충돌 예상 기준점으로부터 목표 위치에 도착하면 시험을 종료한다.
5.4. 신호 위반 경고 서비스
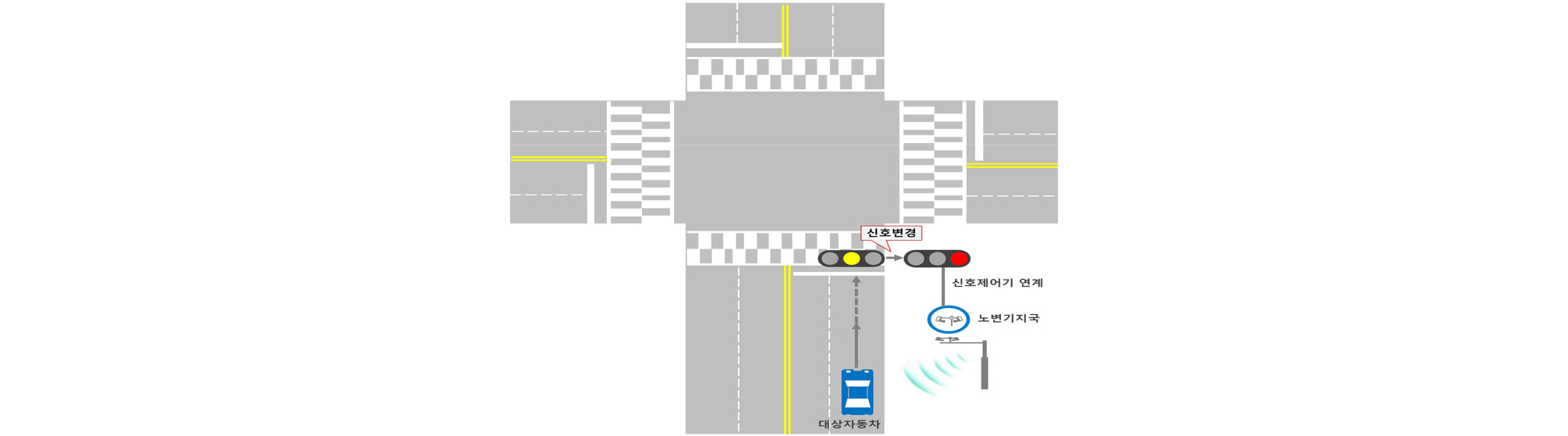
• 대상자동차는 교차로 진입로 정지선으로부터 목표 지점인 시작점에 위치한다.
• 대상자동차는 시작점에서 목표 주행속도까지 가속하여 속도를 충분히 안정시킨다.
• 교차로 신호현시가 대상자동차가 정지선 도착 목표 시간 전에 황색등화인 상태에서 적색등화로 변경되고 대상자동차는 목표 주행속도를 유지하면서 주행한다.
• 대상자동차가 기준 평가시스템으로부터 교통신호 메시지(SPaT)와 지도메시지(MAP)를 수신하고, 알림 기준에 따라 경고 메시지를 표출하는지를 확인한다.
• 대상자동차가 교차로 정지선 통과 전에 알림을 표출하거나 교차로 정지선을 통과할 때까지 알림을 표출하지 않으면 시험을 종료한다.
5.5. 보행자 충돌 경고 서비스
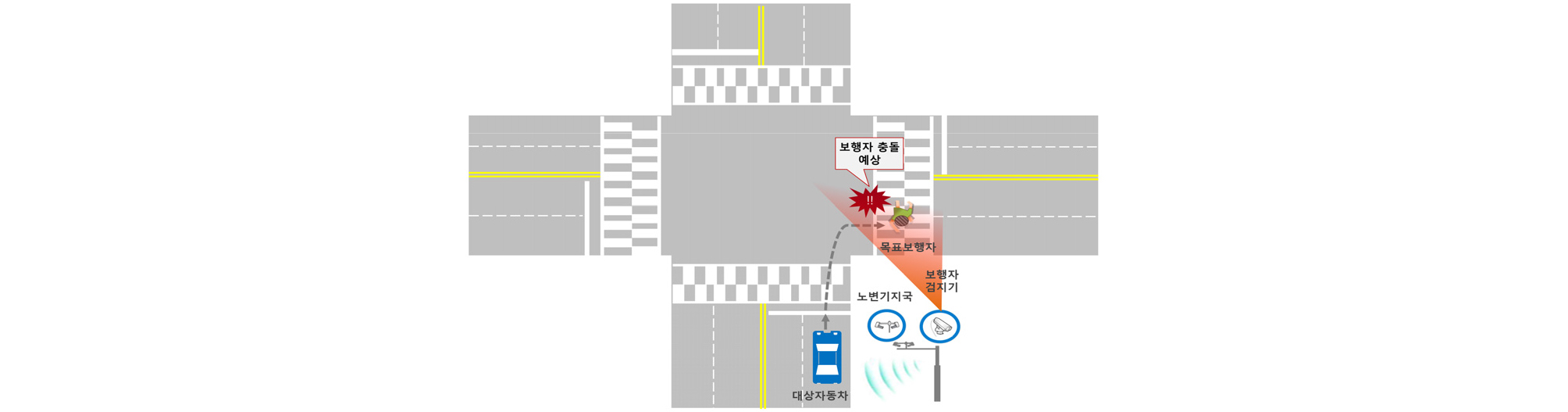
• 대상자동차는 교차로 진입로 정지선으로부터 목표 지점인 시작점에 위치한다.
• 목표보행자는 성인 인체모형을 사용하며, 횡단보도 도착점에서 목표 지점 중앙에 위치한다.
• 대상자동차는 시작점에서 목표 주행속도까지 가속하여 속도를 충분히 안정시킨다.
• 대상자동차는 교차로 진입로 정지선으로부터 목표 위치 이전에 우측 방향지시등을 켠다.
• 대상자동차가 기준 평가시스템으로부터 교통신호 메시지(SPaT)와 지도메시지(MAP)를 수신하고, 알림 기준에 따라 경고 메시지를 표출하는지를 확인한다.
• 대상자동차가 교차로 정지선에 도착하면 시험을 종료한다.
6. 결 론
본 연구에서는 국내 자동차안전도평가(KNCAP)에 V2X 통신장치를 평가 항목으로 도입 시 자동차에 장착되어 있는 V2X 통신장치의 성능평가를 위한 자동차 V2X 통신 성능 안전성 평가기술 개발에 필요한 평가 항목, 평가 환경 및 평가시스템, 평가 방법 등을 도출하였다.
평가 항목은 C-ITS 11개 공통 안전 서비스 기반으로 KNCAP에 도입을 위한 우선순위를 선정 하기 위해 각 서비스 항목과 연관성 있는 도로교통공단 교통사고분석시스템의 교통사고 통계자료를 조사하여 분석하였으며 이를 통해 우선순위가 높은 5개 안전 서비스를 KNCAP 평가 항목으로 선정하였다.
또한 각 서비스별로 평가를 위한 평가시스템과 평가 방법은 국내외 표준, 해외 NCAP 진행 현황 및 국내외 실증사업을 참조하여 도출하였으며, KNCAP 시험이 진행되는 한국교통안전공단 자동차안전연구원에 구축된 시험환경을 고려하여 국내 환경에 맞게 평가 환경 및 평가 방법을 최적화하였다.
향후 본 연구에서 도출한 자동차 V2X 통신 성능 안전성 평가기술이 적절한지 V2X 통신장치를 실차에 장착한 후 KNCAP 평가 항목의 시험을 진행할 계획이며, 이를 통해 평가 방법 각 시나리오에 필요한 목표 주행속도, 목표 시작점, 목표 위치, 목표 거리, 목표 시간, 알림 기준 등의 상세 수치를 도출할 계획이며, 시험을 통해 도출된 수정 사항을 지속해서 V2X 통신 성능 안전성 평가기술에 반영할 계획이다.
