

1. 서 론
2. P-AEB 알고리즘
2.1. Safety Index of P-AEB
2.2. P-AEB 제동 단계 판단 Logic
3. P-AEB 대표 모델 선정
4. P-AEB Simulation 결과 분석
4.1. P-AEB Simulation Scenario
4.2. P-AEB Ride Comfort Model
4.3. P-AEB Clearance Model
5. 결 론
1. 서 론
고령화 인구 증가가 전 세계적으로 이루어지고 있는 가운데, 우리나라의 고령화 추세는 세계에서 가장 빠르게 나타나고 있다.(1) 우리나라는 2018년 65세 이상 인구가 전체인구의 14.4%를 차지하여 고령화 사회를 넘어 고령사회(aged society)에 진입하였다.(2) 이에 따라 최근 10년간 고령 운전자 교통사고 발생 건수가 163% 급증하였으며, 이는 2017년 전체 교통사고 사망자 중 42.2%을 차지한다.(3) 하지만 급격한 고령화 추세에도 고령 운전자에 초점을 맞추어 교통사고를 줄이고자 하는 연구는 미흡한 실정이다.
고령화가 진행되면서 시각·청각 등 인지 능력이 저하됨과 동시에 정보를 처리해서 판단하고 반응하는 능력이 감소한다.(2) 신체 능력이 저하되면 근력과 관절의 가동 범위가 줄어들면서 제어 시에 제한이 생긴다(Table 1).(4) 또한 급정거 시 가해지는 반동에 취약하기 때문에 감속도 값의 적정성을 고려해야 한다.
Table 1.
Characteristics of elderly driver
본 연구는 증가하는 고령 운전자 교통사고의 원인을 고령화에 따라 나타나는 인지-판단 능력 및 신체 능력 저하에 의한 것으로 판단하였다. 따라서 고령 운전자의 교통사고 예방을 목적으로 운전자의 인지-판단-제어를 보조해주며 부드러운 정차를 통해 승차감을 개선해주는, 고 령운전자 특성을 고려한 자동긴급제동시스템(Proactive Autonomous Emergency Braking, P-AEB)을 제안하려 한다.
2. P-AEB 알고리즘
앞에서 언급한 고령 운전자 특성을 고려하여 인지-판단-제어 능력을 보조하기 위하여, 본 연구에서는 각 단계에서 2.1절의 Safety Index를 고려하여 알고리즘을 구성하였다.
2.1. Safety Index of P-AEB
차간거리(Clearance, C)는 자 차량의 앞쪽 끝부분과 선두 차량의 뒤쪽 끝 사이의 거리이다. Headway(HW)는 차간거리에 Headway offset을 적용한 거리이며, 여기서 Headway offset은 안전한 시스템을 위해 설정한 Headway의 편차 거리이다(Fig. 1).
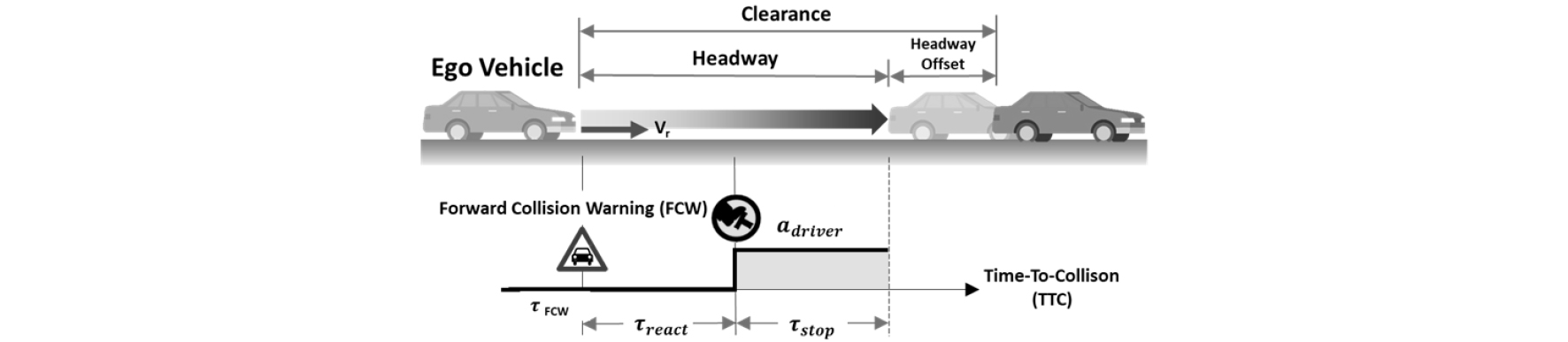
충돌시간(Time To Collision: TTC)은 차량 간 상대속도(vr)가 일정하다고 가정했을 때 충돌까지 걸리는 시간을 의미한다.
차량 정지에 필요한 총 시간(τFCW)은 운전자의 반응 시간(τreact)과 차량을 0 m/s 까지 감속하는 데 필요한 제동 시간(τstop)으로 구성된다. 이때, 제동 시간(τstop)은 주행속도(vr)와 제동 감속(adriver)에 의해 결정된다.
이때, [AEB.timeMargin]은 제동 시점까지의 여유 시간으로 가중치를 적용하면, P-AEB의 단계별 제동 시점을 조정할 수 있는 의미를 가진다.
P-AEB에서는 전방 충돌 위험 감지 시 사고 회피 및 피해 경감을 제공하기 위해 운전자 제동을 지원한다. 단계별 제동을 통해 각 단계에서 가속도 값(aPB1, aPB2, aFB)에 차이를 두어 부드러운 승차감을 가질 수 있도록 한다.
Fig. 2의 각 단계에서의 가속도를 적용했을 때 제동까지의 시간(τPB1, τPB2, τFB)은 주행속도(vr)와 단계별 가속도(aPB1, aPB2, aFB)에 의해 결정된다.
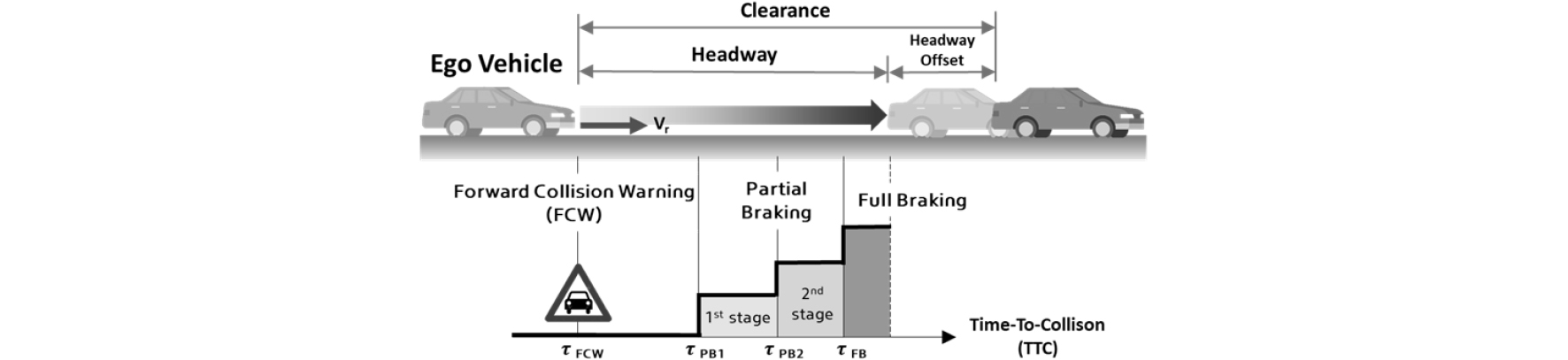
이때, aPB1는 1단계 부분 제동 단계에서의 감가속도 값, aPB2는 2단계 부분 제동 단계에서 감가속도 값이며, aFB는 완전 제동 단계에서의 감가속도 값이다. aPB1, aPB2, aFB 순서로 감가속도의 절댓값이 가중된다.
Safety Index는 P-AEB의 각 단계별 제동에서 차량 정지에 필요한 총 시간을 의미하며, TTC와의 비교를 통해 제동 단계를 순차적으로 활성화시킬 수 있다.
AEB Activation Condition:
P-AEB의 Design Parameter인 AEB.timeMargin와 1단계, 2단계 부분 제동 단계에서의 감속도 값인 aPB1, aPB2, AEB.headwayOffset의 값에 고령 운전자의 특성을 반영하여 목적에 맞는 AEB 알고리즘을 구현할 수 있다(Table 2).
Table 2.
Design parameters for P-AEB
| Factor | Related Equation |
| AEB.timeMargin | |
| aPB1 | |
| aPB2 | |
| AEB.headwayOffset | |
| AEB Activation Condition: TTC < τFCW,PB1,PB2,FB | |
2.2. P-AEB 제동 단계 판단 Logic
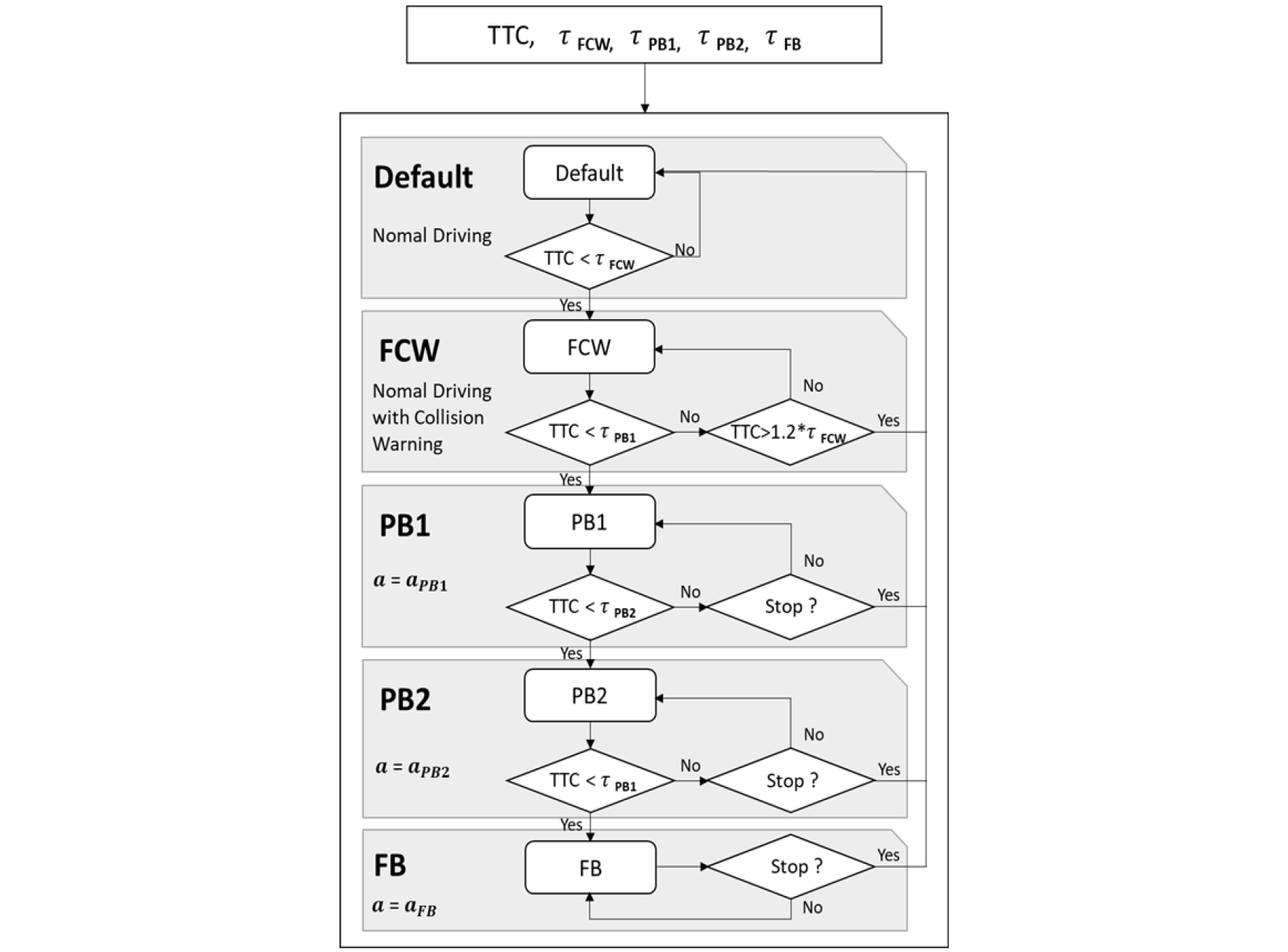
앞에서 언급한 AEB Activation Condition에 관련한 단계별 제동 시스템을 추종하도록 하는 P-AEB 알고리즘은 다음과 같다.
일반적 주행 상황(Default 단계)에서 아래의 (1) 조건을 만족시키면, 전방 충돌 경보 단계(FCW 단계)로 활성화되면서 충돌 경보가 울린다.
FCW 단계에서 (2)의 조건을 만족하면, 1단계 부분 제동 단계(PB1 단계)가 활성화 된다. PB1 단계에서는 감가속이 시작되는데 이때의 감가속도는 aPB1이다.
이때, (3)의 조건을 만족하면 Default 단계로 되돌아오며, (2), (3) 조건을 모두 만족하지 않는 경우에는 FCW 단계를 유지하며 충돌 경보가 계속 울린다.
PB1 단계에서 (4)의 조건을 만족하면, 2단계 부분 제동 단계(PB2 단계)가 활성화 된다. PB2 단계에서 감가속도는 aPB2으로 PB1 단계에 비해 감가속도가 가중된다. PB1 단계에서 (4)를 만족하지 않는 경우, 차량이 완전히 멈출 때까지 PB1 단계를 유지한다.
PB2 단계에서 (5)의 조건을 만족하면, 완전 제동 단계(PB2 단계)가 활성화된다. FB 단계에서 감가속도는 크게 가중되어 -1 g에 해당하는 값으로 aFB이다. FB 단계에서 차량이 완전히 멈추기 전까지는 계속해서 FB 단계를 유지한다.
최종적으로, P-AEB의 제안된 알고리즘의 전체 시스템은 Fig. 3과 같이 구성된다.
3. P-AEB 대표 모델 선정
고령 운전자 특성을 반영한 P-AEB의 두 가지 모델(P(R)-AEB, P(C)-AEB)을 선정하였다. 각 모델의 Design Parameter은 아래와 같다(Table 3). 여기서 C-AEB는 기존의 고령 운전자 특성을 고려하지 못한 기존의 Conventional AEB system을 의미한다.
Table 3.
Design parameters of C-AEB, P(R)-AEB, P(C)-AEB
| Mode |
AEB.timeMargin (sec) | aPB1 (m/s2) | aPB2 (m/s2) |
AEB.headwayOffset (m) |
| C-AEB | 0 | 3.8 | 5.3 | 3.7 |
| P(R)-AEB | 0.3 | 3.3 | 4.8 | 3.9 |
| P(C)-AEB | 0.5 | 3.2 | 4.8 | 4.0 |
P(R)-AEB는 P-AEB Ride Comfort Model로 부드러운 정차를 통해 승차감을 극대화 한 모델이며, P(C)-AEB는 P-AEB Clearance Model로 충분한 차간거리 확보를 통해 교통사고 예방을 목적으로 한 보수적인 모델이다. Table 3에서의 Parameter 선정은 고령 운전자의 시각·청각 등 인지 및 신체 제어 능력이 저하됨(2,4)을 고려한 것이다. 특히 P(R)-AEB 의 파라미터 선정의 경우 AEBS를 사용한 고령 운전자는 기존의 수동 브레이크 시스템을 사용한 운전자에 비해 승차감이 불쾌하다고 느끼는 경향을 반영하였다.(5) 또한 P(C)-AEB 의 경우 고령 운전자의 인지반응시간이 젊은 운전자에 비해 더 느린 것을 바탕으로 파라미터를 선정하였다.(6) 모든 파라미터들은 여러 차례의 튜닝 및 시뮬레이션 등으로 고령 운전자의 신체 능력 저하를 보상하는 방향으로 결정하였으며, 다음 장에서의 시뮬레이션 결과로 그 효과를 입증하였다.
P(R)-AEB 및 P(C)-AEB 두 모델은 모두 공통적으로 AEB.timeMargin의 가중치를 두어 τFCW,PB1,PB2,FB의 값이 증가하여 C-AEB에 비해 AEB Activation Condition를 더 쉽게 만족할 수 있게 설계됐다. 또한, AEB.headwayOffset 값을 증가하여 차량 간 거리가 충분히 확보될 수 있도록 했다.
4. P-AEB Simulation 결과 분석
4.1. P-AEB Simulation Scenario
본 논문에서 제안하는 P-AEB 알고리즘의 성능을 확인하기 위해 시뮬레이션을 수행하였다. 시뮬레이션은 MATLAB/Simulink를 통해 검증하였으며, 차량의 오른쪽 전방에 두 대의 장애물 차량이 있고, 보행자가 그 뒤에서 차량 앞으로 갑자기 나오는 상황을 가정하였다.
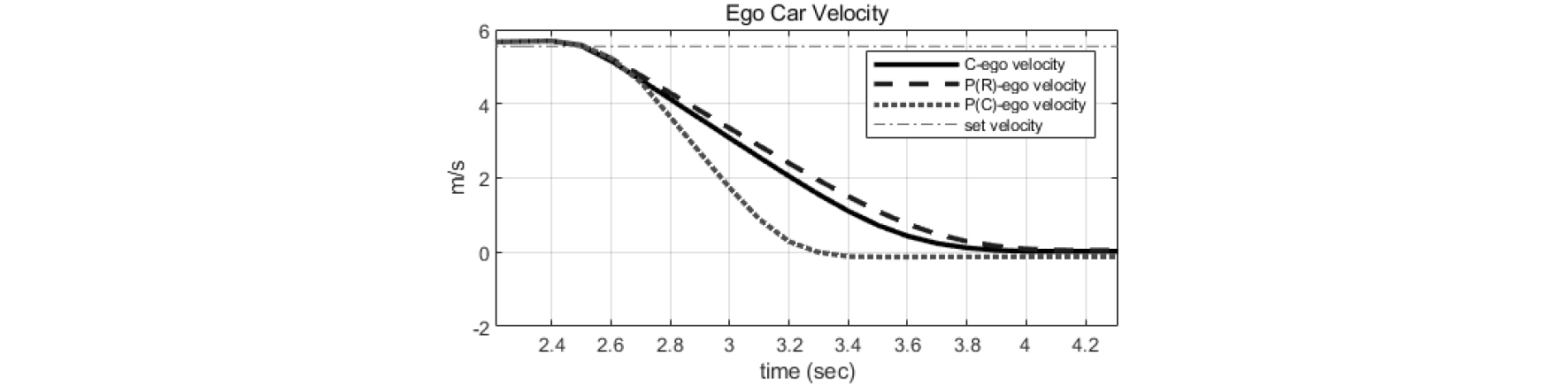
설계된 P-AEB 알고리즘의 성능을 확인하기 위해 Fig. 5와 같은 상황을 가정하였다. 이때, Ego Car의 속도(v)는 Fig. 4와 같다.

4.2. P-AEB Ride Comfort Model
TTC와 τFCW,PB1,PB2,FB의 비교를 통해 AEB Activation Condition을 만족하는지 알 수 있다. Fig. 6과 Fig. 7을 비교하면 3절에서 언급한 것과 같이 C-AEB에 비해 P(R)-AEB에서 τFCW,PB1,PB2,FB의 값이 증가하여 AEB Activation Condition를 더 쉽게 만족할 수 있다. 즉, 고령 운전자의 인지 시점을 기존보다 단축시킬 수 있으며, 더 빠르게 차량의 제동 제어에 도움을 줄 수 있다는 것을 의미한다.
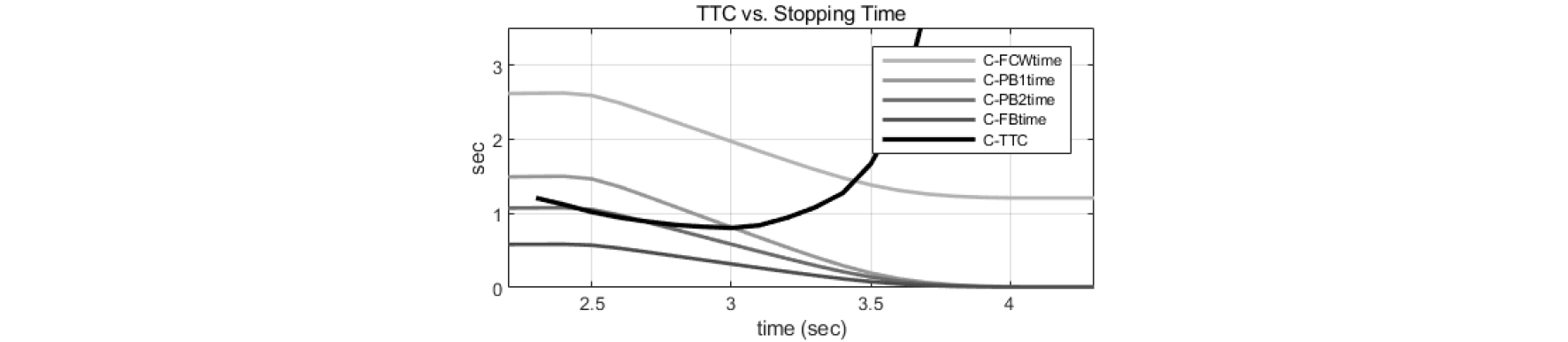
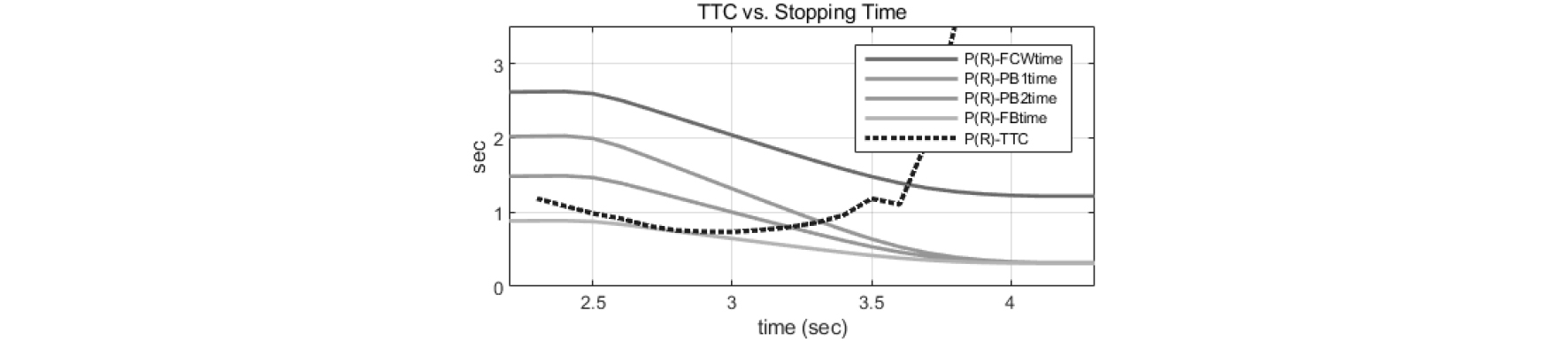
Fig. 6에서 C-AEB는 2.5초에 TTC < τPB2를 만족하고, Fig. 8에서 P(R)-AEB는 2.3초에 해당 Activation Condition을 만족하지만, AEB Status는 두 모델 모두 2.3초에 FCW 단계 2.4초에 PB1 단계, 2.5초에 PB2 단계에 이른 것을 확인할 수 있다(Fig. 8). 이는 AEB 알고리즘이 순서대로 단계별 제동을 진행하는 형태로 구성되어 있기 때문이다.
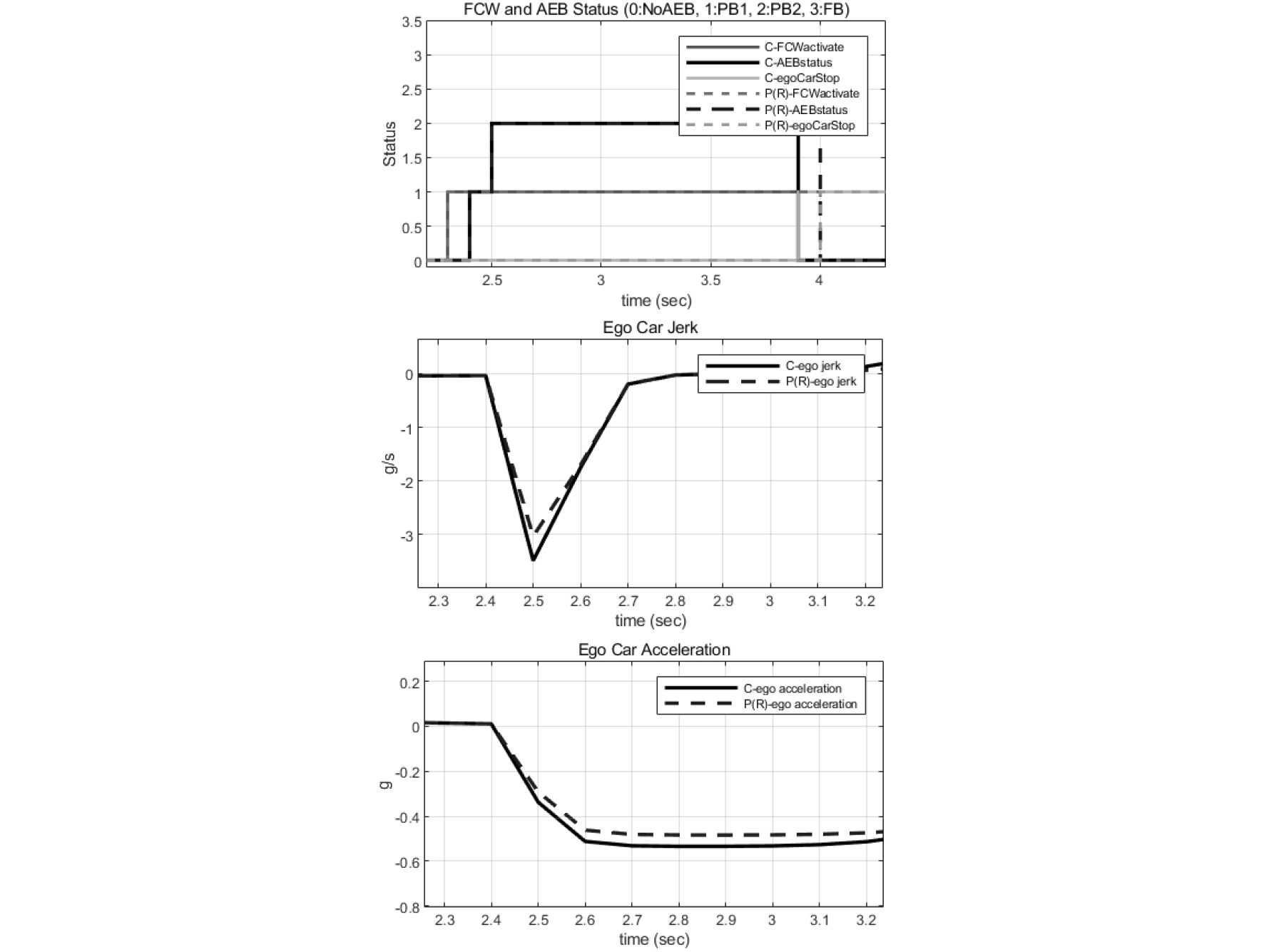
Fig. 8의 Jerk와 Acceleration 그래프를 통해 P(R)-AEB의 Jerk의 peak값이 -3.03[g/s]에서 -3.48[g/s]으로 변화했으며, 가속도의 peak값이 -0.53[g]에서 -0.48[g]으로 급격한 변화를 줄여 승차감이 좋아졌음을 확인할 수 있다. 하지만 감속도 값을 줄여 제동 시점이 4초로 기존보다 0.1초 증가했음을 보여준다.
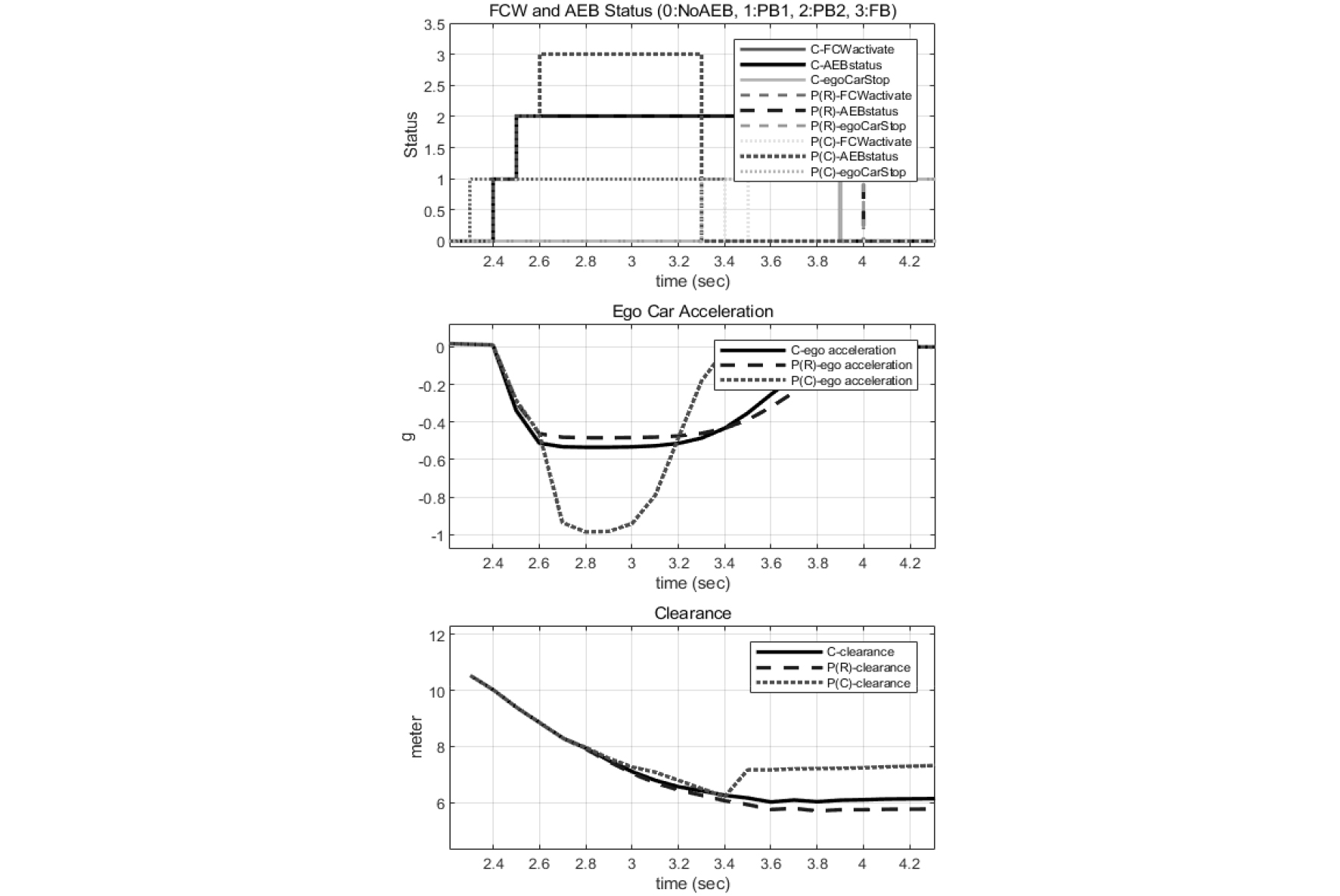
4.3. P-AEB Clearance Model
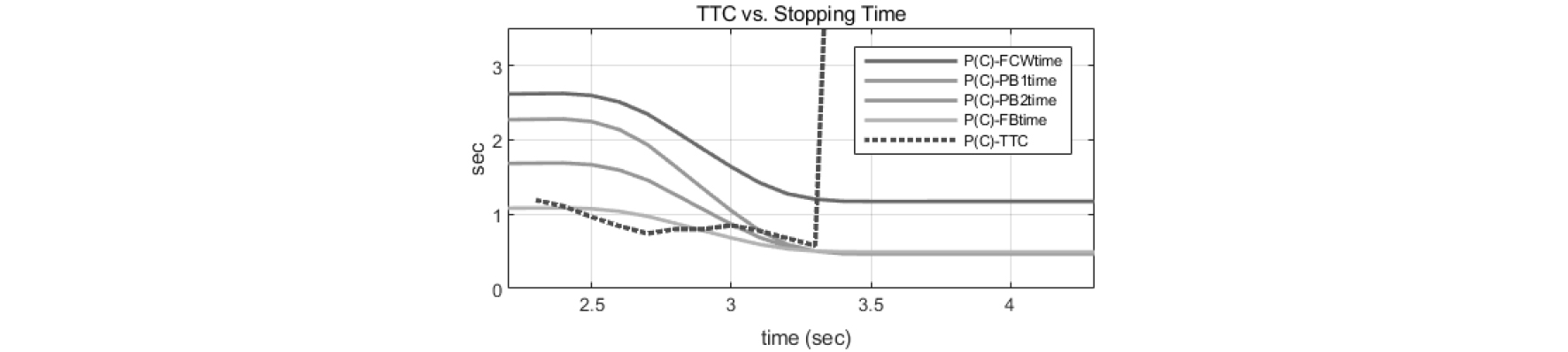
Fig. 9에서 P(C)-AEB는 2.5초에 TTC < τFB를 만족하여 순차적으로 단계별 제동을 하며 2.6초에는 FB 단계가 활성화 된다(Fig. 10). 3초에서 더 이상 TTC < τFB를 만족하지 않지만 차량이 완전히 멈출 때까지 FB 단계를 유지하며 -1 g의 감가속도가 가해진다. 가속도의 큰 변화로 Fig. 10의 Jerk와 Acceleration 그래프를 통해 P(C)-AEB의 Jerk의 절댓값이 크게 증가하였으며, 가속도 또한 급격히 감소하여 승차감이 저하되었음을 확인할 수 있다. 하지만 보수적인 모델로서 Clearance 그래프를 통해 C-AEB와 P(R)-AEB 비교하여 차간 거리를 충분히 확보했다. 따라서 여유 있는 차간 거리 확보를 통해 고령 운전자의 저하된 인지-반응 시간의 한계를 보조하고자 하는데 효과가 있음을 입증하였다.
5. 결 론
본 연구에서는 고령 운전자의 교통사고 예방을 위해 고령 운전자의 특성을 고려한 P-AEB 시스템을 제안하였다. 시뮬레이션을 기반으로 승차감 중심의 P(R)-AEB 시스템과 차간 거리 확보를 중점으로 한 P(C)-AEB 시스템을 기존의 C-AEB 시스템과 비교·분석하면서 해당 AEB 시스템의 제동 패턴을 알아보았다. 추후 승차감을 개선하면서도 차간 거리를 유지할 수 있는 AEB 알고리즘이 개발되어야 할 것이다. 또한 향후 연구에서는 긴급 제동뿐만 아니라 Adaptive Cruise Control 등 다양 한 ADAS 기능에 대한 고령 운전자의 수용성을 조사하고 그에 따른 고령 운전자에 특화된 기능을 시뮬레이션 및 실험 등으로 검증할 예정이다.
