

1. 서 론
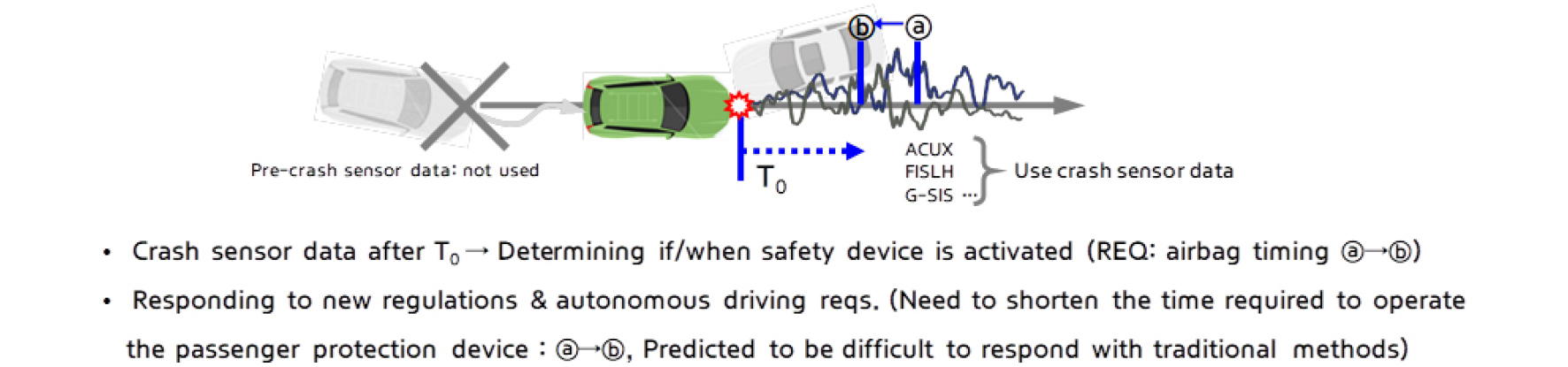
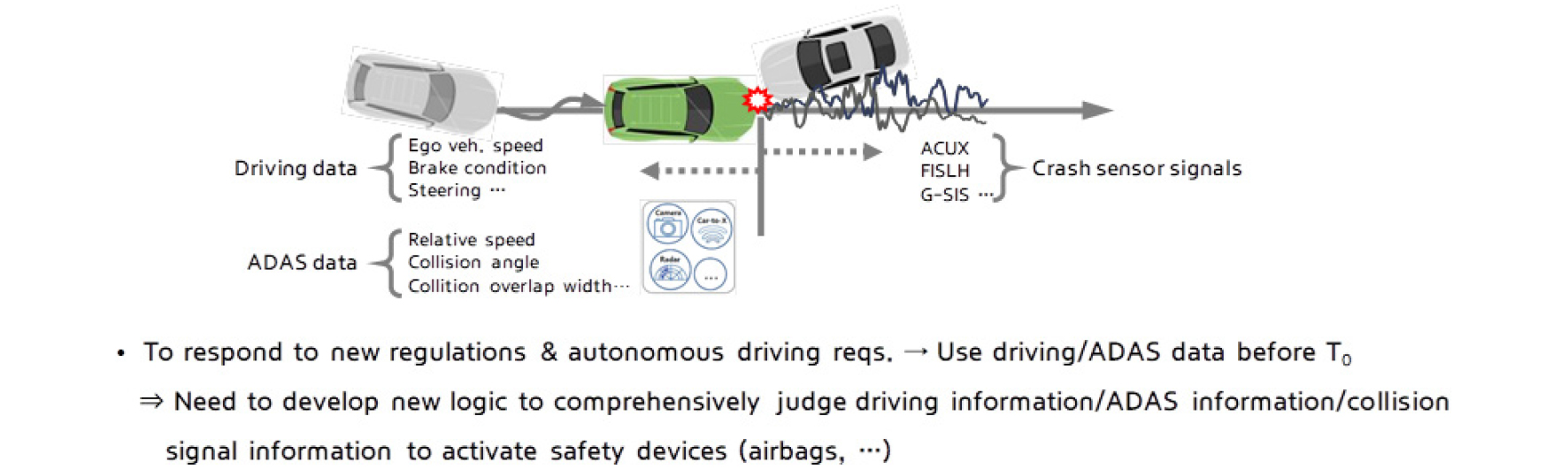
자동차 산업에서 안전 요구사항을 충족시키는 자동차 개발은 점점 더 복잡해지고 있다. 이는 각국 정부 및 품질평가 기관이 차량에 대한 새로운 안전평가 기준을 지속해서 강화하고 있기 때문이다. 이러한 다양한 요구사항 중 충돌안전 분야의 요구조건은 에어백, 시트벨트 등을 제어하여 충족시켜야 하며, 충돌 이후의 정보를 활용한 대응이므로 수동안전이라 정의할 수 있다(Fig. 1). 이러한 수동안전 대응은 에어백, 시트, 시트벨트 등의 모듈 설계 최적화와 충돌을 감지하는 센서의 추가 또는 위치 변경, 충돌유형을 판정하는 로직의 고도화 등 다양한 방법으로 시도되고 있다. 이와 별도로 지능형운전자보조시스템(ADAS: Advanced Driver Assistance Systems)에는 첨단 감지센서, GPS, 통신, 영상장비 등이 있으며, 이를 이용하여 주행 중 일부 상황을 차량 스스로 인지/판단하여 자동차를 제어하거나 운전자에게 소리/불빛/진동 등의 형태로 미리 위험요소를 알려주고 있다. 하지만 ADAS로 대변되는 능동안전 센서를 기존의 수동안전에서 사용하여 사고시 승객안전을 향상시키는 연구는 FCA 시스템의 급제동 레벨을 활용하는 수준으로 제한되어 사용되고 있다. 따라서 본 연구에서는 충돌 이전에 확보된 ADAS 정보 및 주행정보를 활용하여 사고시 승객보호성능을 향상시킬 수 있는 로직을 개발하고자 한다(Fig. 2).
2. 본 론
2.1. 능수동 통합 충돌안전 로직 개요
개발하고자 하는 능수동 통합 충돌안전 로직은 Fig. 3과 같이 충돌전 데이터 ①과 충돌후 데이터 ②를 입력으로 하여 승객보호장비 작동시점 등 원하는 출력 ④가 나오도록 머신러닝 지도학습 방법을 사용하여 개발하였다. ①단계에 해당하는 충돌전 ADAS 데이터는 직선로 및 교차로 8가지 사고 시나리오(2018)에 대해서 CarMaker 해석을 통해 총 45,840 충돌 케이스를 확보하였다(Fig. 4). 이 해석에서는 시나리오별로 상대속도, 상대거리, 충돌예상시간(TTC: Time To Collision) 등을 다양한 조합으로 설정하여 사고 상황을 재현하였다. CarMaker 해석 충돌 케이스 중 실사고에서 발생빈도와 충돌심각도가 높을 것으로 예상되는 대표 충돌 유형을 도출한 후 이에 맞는 차대차 충돌 ②단계와 등가충돌모드 ④단계 데이터를 LS-DYNA충돌해석을 수행하여, 총 83개 충돌해석 데이터를 확보하였다.
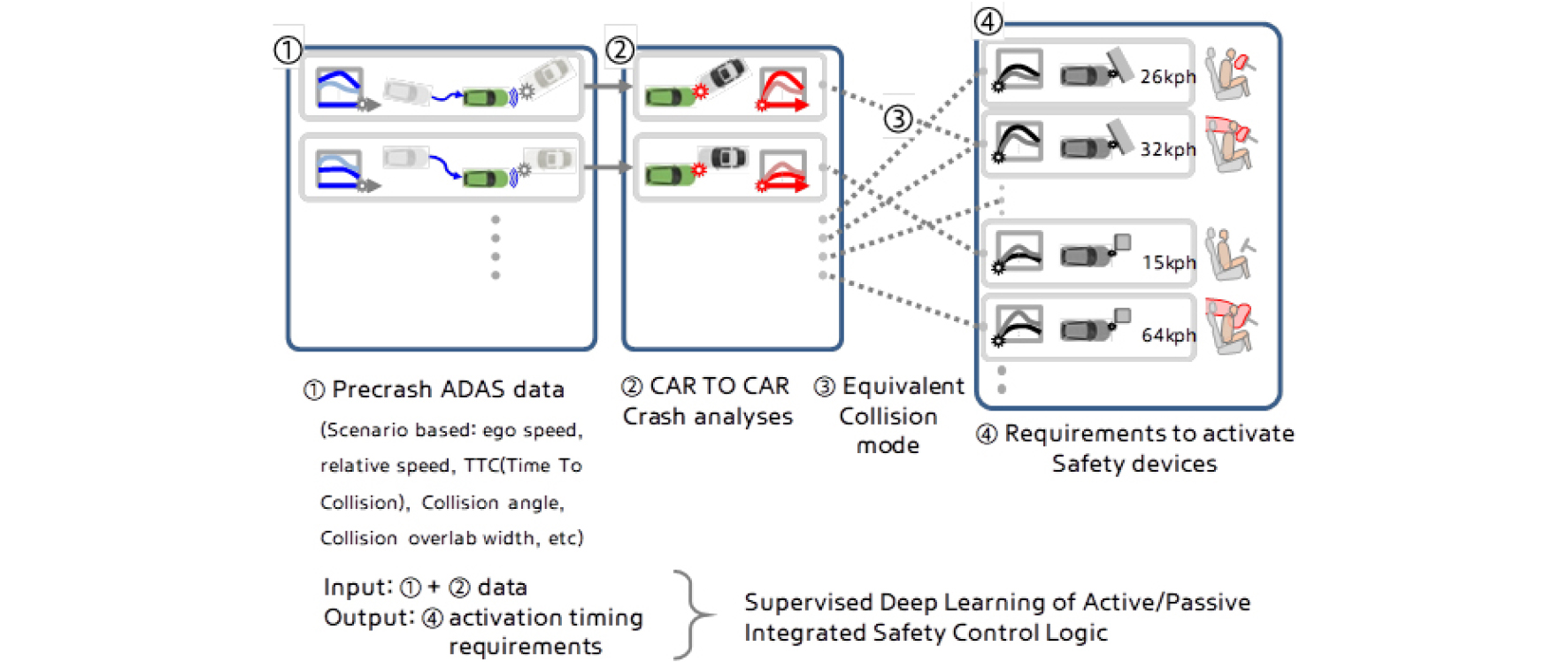

여기서 Fig. 3의 차대차 충돌사고상황(①+②)에서 요구되는 승객보호장비 작동 요구시간은 해당 차대차충돌과 가장 유사한 충돌시험(법규/상품성, 센싱)항목의 요구시간을 AEB 작동단계에 따라 보정(0단계: 100%, 1단계: 90%, 2단계: 80%)하여 적용하였다. 이를 위해서 각각의 차대차 충돌을 가장 유사한 등가 충돌시험 항목으로 매핑시켜 라벨링하여야 하며(③단계) 이 과정에도 머신러닝 기법을 적용하였다.
2.2. 등가충돌모드 라벨링
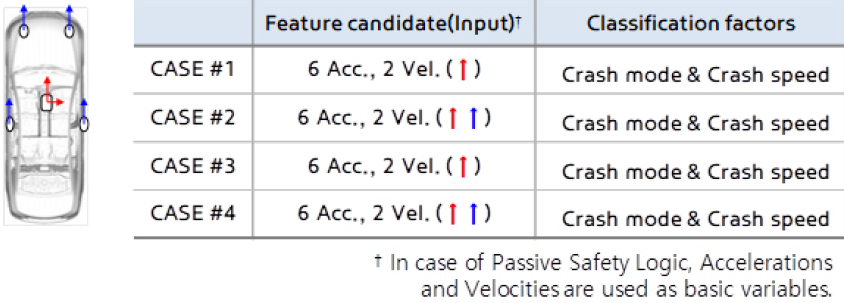
Fig. 5의 등가충돌모드 라벨링의 목적은 ②의 차대차 충돌이 승객보호장비의 작동요구조건 등에 대한 다양한 정보를 정형화된 ④의 충돌유형 중 어느 모드/유형에 해당하는지 분류하여 라벨링 하는 것이다. 여기서 입력데이터와 충돌모드 구분 방법은 Table 1과 같이 4가지 방법을 시도하였고, 데이터 ④로 학습/검증을 수행한 후 데이터 ②로 테스트를 실시하였다. 여기서 데이터 ④는 대형 세단의 22건 실차 시험데이터와 30건의 해석데이터 총 52건을 센서신호진폭 산포를 확대(augmentation)하여 52,500개 데이터를 이용하였다. 그리고 데이터 ②는 차대차 충돌해석 32건을 센서신호진폭 산포를 확대하여 20,000개 데이터를 사용하였다.

데이터 ④를 이용하여 Table 1의 4가지 CASE에 대해 학습/검증을 실시한 결과, CNN/FCN/MLP/ ResNET 4가지 딥러닝 방법(1)에서 100%의 분류 정확도를 보였으며, 이 파라미터를 이용하여 차대차 충돌 데이터 ②의 라벨링을 실시하였다.
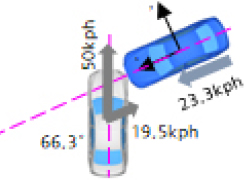
Table 2는 차대차충돌 라벨링 중 교차로 충돌 시나리오(JC102)에 대한 결과 예시이며, 표에서 보듯이 파란색 차량 기준으로 상대 충돌속도는 40kph±α이고, 충돌유형은 정면 또는 좌경사 충돌유형으로 추정된다. 따라서 충돌모드와 충돌속도를 각각 따로 학습하여 분류하는 것이 더 정확한 결과가 나오며, 입력데이터도 가속도 6개, 속도 6개를 사용한 CASE#4가 정확한 결과가 나옴을 알 수 있었다.
Table 2.
Equivalent Crash Mode of Car-to-Car Collision (excerpts)
2.3. 승객보호장치 작동요구조건 지도학습
Fig. 6에서 보는 바와 같이 CarMaker로 확보한 충돌전 데이터①과 Ls-DYNA로 확보한 충돌이후의 차대차 충돌데이터②는 사고 유형별/산포별로 조합하여 충돌전후 전체 입력데이터로 구성하고, 등가충돌유형 매핑(라벨링) 과정으로 얻은 각각의 사례에 대한 승객장비 작동요구조건을 만족하도록 딥러닝 로직을 학습시킨 후 기존 충돌안전제어로직과 성능을 비교하게 된다. 여기서 사용한 ADAS 데이터는 충돌상대속도, 상대거리, TTC를 사용하였고, 충돌데이터로는 Table 1의 CASE#4를 적용하였다. 여기서 적용한 딥러닝 알고리즘은 순환신경망 기법 중 하나인 LSTM에 충돌유형구분과 전개여부 결정을 하는 모듈을 추가한 형태로 구성하였으며 2.3.1~2.3.2절에서 상세 구조를 설명하였다.

2.3.1 순환신경망 알고리즘
순환신경망(RNN: Recurrent neural network)(4)은 sequential data를 다루는 인공 신경망의 한 종류로서 번역, 음성인식, 이상 징후 감지 등 다양한 분야에서 우수한 성능을 보이고 있다.
RNN은 long short term memory(LSTM)(5), gated recurrent unit(GRU)(6) 등 다양한 구조를 가질 수 있다. 본 연구에서는 LSTM 기반의 모델을 제안한다.
Fig. 7(a)은 LSTM의 구조를 나타내고 있다. Feed forward network와는 다르게 feedback connection이 있어 현재까지 입력된 정보들이 미래의 정보를 예측하는데 사용될 수 있다. Feedback connection을 펼치면 Fig. 7(b)처럼 표현할 수 있다.

LSTM은 현재까지 주어진 입력 x1, x2, …, xt의 정보를 hidden representation ht로 저장하고 있다. LSTM은 ht와 xt+1를 활용하여 ht+1을 계산한다. 이렇게 계산된 ht는 LSTM을 활용하는 application(분류 또는 예측)에 사용된다.
LSTM 내부는 기본적으로 input gate, output gate, forget gate등으로 이루어져 있다. 이러한 gate들은 누적된 sequential data의 정보 중 application 성능 향상에 도움이 되는 정보들을 선택적으로 저장하고 도움이 되지 않는 정보는 저장하지 않게 한다. 이를 통해 LSTM은 sequential data의 유의미한 pattern을 찾을 수 있게 된다.
2.3.2. 충돌안전 로직 딥러닝 신경망 구조
본 논문에서는 시간에 따라 주어지는 차량의 센서 데이터로부터 실시간으로 충돌 모드 분류와 전개 여부 결정을 하는 인공 신경망을 제안한다.
Fig. 8(a)는 제안하는 인공 신경망의 구성 요소를 나타낸다. LSTM은 주어진 입력 x1, x2, …, xt으로부터 hidden representation ht를 찾아낸다. 특성 추출 네트워크는 ht로부터 모드 분류와 전개 여부 결정을 위한 특성을 추출한다. 모드 분류 네트워크와 전개 여부 결정 네트워크는 추출된 특성을 바탕으로 각 시점에서의 충돌 모드 mt와 전개 여부 dt를 계산한다.
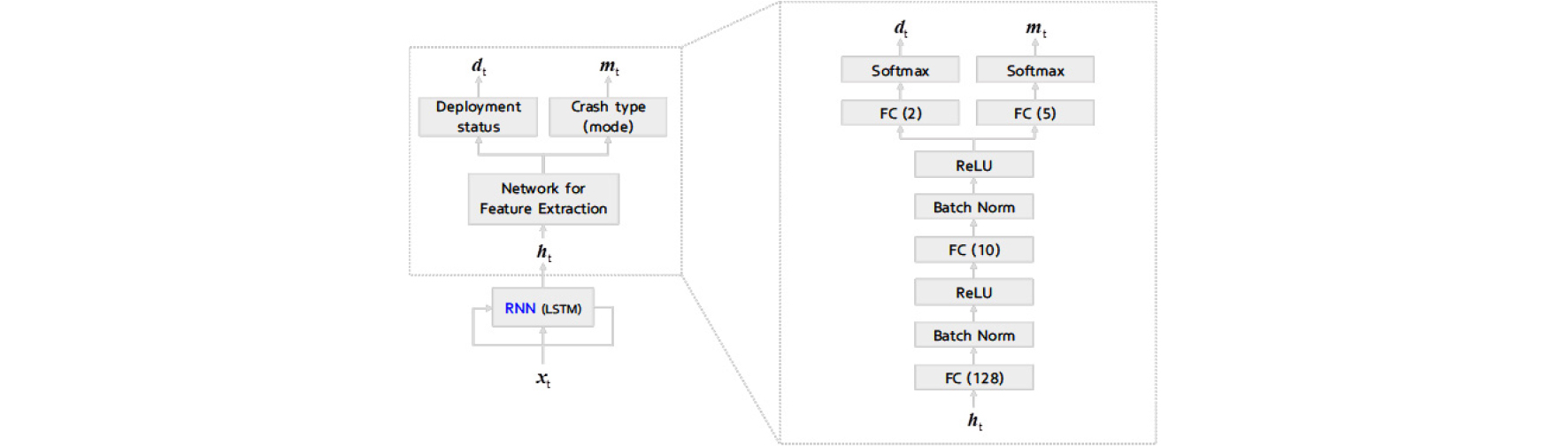
Fig. 8(b)는 특성 추출, 모드 분류, 전개 여부 결정 네트워크의 구체적인 구조를 나타낸다. Sequential한 정보들이 누적되어 있는 fully connected layer(FC)를 지나가면서 차원 감소를 통해 핵심적인 정보들이 추려진다. Batch normalization(Batch Norm)(7)은 입력 데이터의 분포를 유사하게 만들어 인공 신경망 학습이 데이터를 더 잘 배울 수 있게 한다. Rectified linear unit(ReLU)(8)은 인공신경망에 비선형성을 부여하여 데이터의 복잡한 패턴을 배울 수 있게 한다. 모드 분류 네트워크에서는 softmax 함수를 이용하여 각 충돌유형의 확률을 계산한다. 전개 결정 네트워크에서는 sigmoid 함수를 이용하여 전개 여부를 확률로 나타낸다.
모드 분류 네트워크를 학습하기 위해서는 categorical cross entropy loss를 사용했으며 전개 여부 결정 네트워크를 학습하기 위해서는 binary cross entropy loss를 사용하였다. 특성 추출 네트워크와 LSTM은 두 개의 loss를 동시에 줄이도록 학습된다.
3. 결 론
본 연구에서는 딥러닝을 이용하여 충돌 이전의 ADAS 데이터와 충돌이후의 센서데이터를 이용하여 승객보호장비를 제어하는 로직을 제안하였다. 이 과정에서 다음과 같은 산출물을 얻었다.
(1) 차대차 충돌을 등가의 법규/상품성 충돌평가데이터로 라벨링 하는 방법 제안
(2) 순환신경망 기법인 LSTM 로직을 이용하여 실시간 시계열 ADAS/충돌센서 데이터를 입력으로 하여 승객보호장비의 작동을 판단하는 로직을 제안
(3) LSTM을 적용한 승객보호장비 작동로직의 학습과정이 시행착오법으로 튜닝하는 기존 로직 대비 양산차 적용과정에서 개발기간이 단축되고, 설계자의 주관적 경험이 배제 가능함.
향후 개발로직의 양산을 위해서는 대상 제어기의 성능 적합성 검토 및 코드 변환 등의 추가 연구가 필요할 것으로 판단된다.
