

1. 서 론
2. 교통사고 시뮬레이션 시나리오 모델링
2.1. 교통사고 케이스 선별
2.2. 시나리오 상세 모델링
3. 결과 및 분석
3.1. 시뮬레이션 결과
3.2. 자기 차량과 상대 차량의 AEBS 동시 적용 결과
4. 결 론
1. 서 론
기존에는 차량 자체의 결함을 교통사고의 가장 큰 위험 요소라 생각하여 (1)ISO26262라는 기능 결함 안전성 평가에 집중한 자동차 기능 안전에 대한 국제 표준에 의해 차량이 개발된다. 하지만, 앞으로는 자율주행 혹은 ADAS(Advanced Driving Assistance System) 기술이 탑재됨에 따라 기능적 결함이 없는 차량일지라도 예외적, 외부적 요인으로부터 발생할지도 모르는 위험 상황에 대비하기 위해 SOTIF(Safety Of The Intended Functionality)라는 개념이 추가 되었다.
SOTIF의 주된 목적은 우리가 이미 알고 있는 인자(Known factor)와 위험 인자(Unsafe factor)를 찾아서 자율주행 차량의 안전성에 영향을 끼칠 수 있는 위험 상황에 대비하는 것이다. 예를 들어 기능 결함이 전혀 없는 차량에 AEBS(Advanced Emergency Braking System) 기능이 탑재되었다고 가정했을 때 앞 차량이 불가피한 상황으로 인해 갑자기 정차한다면 아무리 AEBS가 기능적으로 완벽할지라도 제 기능을 발휘 못 하여 사고가 발생할 가능성이 있다. 이 경우 우리가 생각할 수 있는 앞차의 갑작스러운 정차 상황을 ‘Known factor’라고 하고, 사고가 발생했기 때문에 ‘Unsafe factor’라 말할 수 있다. (2)결과적으로 모든 경우의 수를 고려할 수 없기에 점차 Area 3에 해당하는 Unknown & Unsafe factor를 Fig. 2와 같이 줄임으로써 기술적 한계가 아닌, 미처 고려하지 못한 불안전한 상황을 최소화하는 것이다.


최근 자율주행 차량 도입의 기대가 높아짐에 따라 국내외에서 SOTIF 관련 연구도 활발히 진행되고 있다. (3)Society of Automotive Engineers(SAE)에서 자율주행기술 적용 단계를 0~5 Level로 구분 지어 정의한다. 이 중 운전자의 개입 없이도 충분히 주행이 가능한 (4)Level 3 이상의 높은 수준의 자율 주행 차량에 대한 SOTIF 표준화와 측정에 대한 연구가 진행되었다. (5)자율주행 차량의 SOTIF에 대한 형식적 모델링과 결과 분석, (6)시스템의 기능과 작동을 모델로 표현하고 SOTIF를 활용하여 시스템 안전성을 평가하는 방법에 관련한 연구들이 진행되었다.
하지만, 대부분의 연구에서는 모든 위험 상황을 고려한 것이 아닌, (7)특정 상황에서의 실제 교통사고 데이터를 기반으로 시나리오를 생성하여 그 결과를 분석하였다. 여러 경우의 시나리오를 함께 고려한 연구에서는 ADAS 및 자율주행 알고리즘과 센서 특성을 대입하여 얻은 결과가 아닌 사고 데이터를 이용한 통계학적 접근이었다. 그뿐만 아니라 자기 차량 외에 주행하는 주변 차량에는 자율주행 시스템이 적용되지 않았다는 가정하에 대부분의 연구들이 진행되었다. 이렇듯 SOTIF의 목적을 달성하기 위한 충분한 DB가 존재하지 않는 실정이다. 따라서 SOTIF 표준 개발을 위해 실제 주행 환경과 여러 경우의 주행 시나리오를 반영한 시뮬레이션을 통하여 Safe / Unsafe factor를 구분하는 연구가 선행되어야 한다고 판단하였다.
본 연구에서는 교통사고 대표 유형을 선별하여 시뮬레이션하기 위해서 IGLAD(Initiative for the Global Harmonization of Accident Data)의 Codebook을 기반하에 시나리오를 생성하였다. 또한, 현재 상용화 중인 ADAS 기능 중 주행 안전성과 가장 밀접한 AEBS를 해당 시나리오에 적용한 후 그 결과를 분석하였다. 향후 대부분의 차량에 자율주행 시스템이 적용되는 것을 고려하여, 자기 차량뿐만 아니라 상대 차량에도 동일한 AEBS를 적용함으로써 상대 차량의 자율주행 시스템 적용 여부에 따라 사고 결과가 어떻게 달라지는지 비교 분석하고자 한다.
2. 교통사고 시뮬레이션 시나리오 모델링
2.1. 교통사고 케이스 선별
(8)IGLAD에서는 2019년 기준 7050여 건의 세계 각국 교통사고 케이스들을 수집하였으며 이를 IGLAD Codebook에 대표 7가지 Type(Type 1 - Type7)으로 분류하였다. 본 연구에 시뮬레이션 된 케이스들은 Table 1과 같다.
Table 1.
IGLAD traffic accident cases
| # | Criteria | Number |
| 1. | IGLAD Type 1 ~ Type 7 total accident cases | 248 |
| 2. | Modeling completed cases excluding duplicated | 205 |
| 3. | Added derivative cases | 7 (Included#2) |
| 4. | AEBS applicated cases | 176 |
Type 1에 해당하는 29개의 Loss of control accident 케이스들은 자기 차량 결함에 의한 사고이므로 본 연구에서 제외되었다.
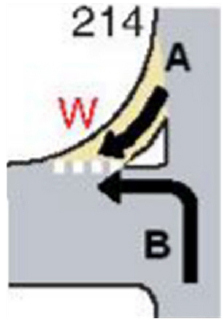
Table 2에 나와 있는 273 케이스는 우선 차로 진입 시나리오이지만 자율주행 안전성에 영향을 주지 않기 때문에 우선 차로 상황을 무시하였고 그 결과 221, 222 케이스와 동일한 시나리오이므로 제외했다. 214 케이스는 상대 차량이 완전히 통과할 때까지 대기 후 주행하는 시나리오이며 이 또한 자율주행 안전성에 영향을 주지 않는다. 이처럼 자율주행 안전성에 영향을 주지 않거나 후진 시나리오(713 케이스), 교통 신호 체계 시나리오(623 케이스)처럼 일반적인 주행 상황이 아닌 특별한 케이스들은 본 연구에서 제외했다. 최종적으로 AEBS가 적용되어 시뮬레이션이 완료된 시나리오는 총 176개이다.





2.2. 시나리오 상세 모델링
2.2.1. 시나리오 정의
IGLAD Codebook에서의 각 케이스별 설명은 보는 시각에 따라 해석이 달라질 수 있는 모호한 기준을 가지고 있다. 예를 들어 Fig. 3과 같이 3대의 차량이 주행 중이고 한 명의 보행자가 보행 중일 때 자기 차 및 상대 차와 보행자의 위치, 차량 속도, 도로의 기울기와 차선의 수 등이 정확하게 기술되어 있지 않고 대략적인 주행 경로와 사고의 형태만 표현되어 있다. 따라서, 신뢰도 있는 시뮬레이션 결과를 얻기 위해서는 각 시나리오에 적용될 수 있는 동일한 기준이 필요하다.
본 연구에서는 시내 주행을 기준으로 시나리오를 구성했으므로 자기 차량, 상대 차량, 자전거, 보행자와 같은 움직이는 물체(Actor)의 속도를 Table 3과 같이 정의하였다.
Table 3.
Velocity of actors
| Actor | Velocity (m/s) | |
| Straight | Curve | |
| Ego vehicle | 13.889 | 5.0 |
| Target vehicle1 | 11.112 | 5.0 |
| Target behicle2 | 10.0 | 5.0 |
| Bicycle | 5.0 | - |
| Pedestrian | 1.5 | - |
(9)2016년 경찰청은 도심지역 교통사고를 감소하기 위해 ‘안전속도 5030’이라는 정책을 수립하였다. 교통체증의 영향까지 고려한 도심지역에서의 안전속도를 30 km/h에서 50 km/h로 제안했으며 본 연구에서는 최댓값인 50 km/h(13.889 m/s)를 자기 차량의 속도로 지정하였다. 상대 차량의 경우에는 자기 차량의 속도에 각각 10 km/h, 15 km/h의 차등을 두었으며, (10)자전거의 경우 교차로 횡단도에서의 평균 통행속도가 18 km/h이므로 동일한 값으로 지정하였다. (11)보행자 속도는 일반인 기준 횡단보도 보행속도인 1.5 m/s로 지정하였다. 또한 차량이 곡선도로에서 직선 주행 속도와 동일한 주행상태를 유지한다는 것은 비현실적이기 때문에 Heading 각도 변화량(yaw_rate)이 ±30 deg/s 이상 혹은 이하 값을 가지면 5 m/s로 감속하는 조건을 추가했다.
자기 차량에만 AEBS 기능이 탑재되어 있다고 가정하였으며 해당 속도로 주행하였을 때 만약 자기 차량에 AEBS와 같은 ADAS 기능이 전무한 경우에는 자기 차량과 Target(차량, 자전거, 보행자 사물 등)이 필연적으로 충돌 사고가 발생할 수밖에 없는 시나리오로 모델링했다. 모든 사고 시나리오의 시뮬레이션 결과값을 얻은 뒤에는 동일한 시나리오에서 상대 차량에도 AEBS 기능을 탑재함으로써 자기 차량에만 AEBS 기능이 탑재된 경우와 결과가 달라질 수 있다는 것을 확인할 것이다.
Fig. 4는 IGLAD 412 케이스를 Prescan으로 시뮬레이션한 결과 화면이다. 자기 차량의 오른쪽 차선에서 후행 차량이 주행 중이고 왼쪽 차선에서는 정차된 차량이 있다. 이 상황에서 정차된 차량에 가려진 보행자가 갑자기 주행 경로에 진입하더라도 자기 차량에 적용된 AEBS가 정상 작동하여 사고가 발생하지 않은 것을 볼 수 있다. 하지만, 자기 차량에서 AEBS가 작동하지 않았다면 필시 사고가 발생했을 것이다.

2.2.2. 센서 및 ADAS 알고리즘
각 시나리오에 적용된 센서와 ADAS 알고리즘은 Prescan에서 제공하는 DEMO를 수정한 결과이다. 본 연구에서는 RADAR(RAdio Detecting And Ranging) 센서를 모사한 Prescan의 TIS(Technology Independent Sensor)를 사용했지만, 사용 목적에 따라 CAMERA, LIDAR(Light Detection And Ranging) 등의 센서도 사용이 가능하다. 또한, 여러 ADAS 기능 중 AEBS를 적용하여 시뮬레이션하였지만 ACC(Adaptive Cruise Control), LKAS(Lane Keeping Assistance System) 등 AEBS 외에 ADAS 알고리즘을 적용하여 시뮬레이션도 가능하다.
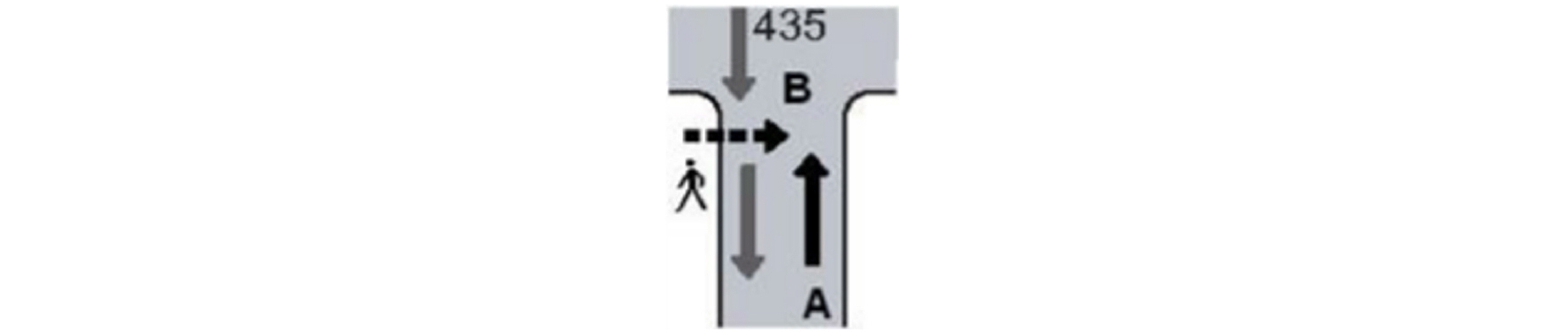
센서의 경우 Fig. 5처럼 2개의 TIS가 적용되었으며 한 개는 Long Range RADAR로서 전방 150 m 이내에 Object를 감지하고 또 다른 한 개는 Short Range RADAR로서 30 m 이내에 있는 Object를 감지한다.
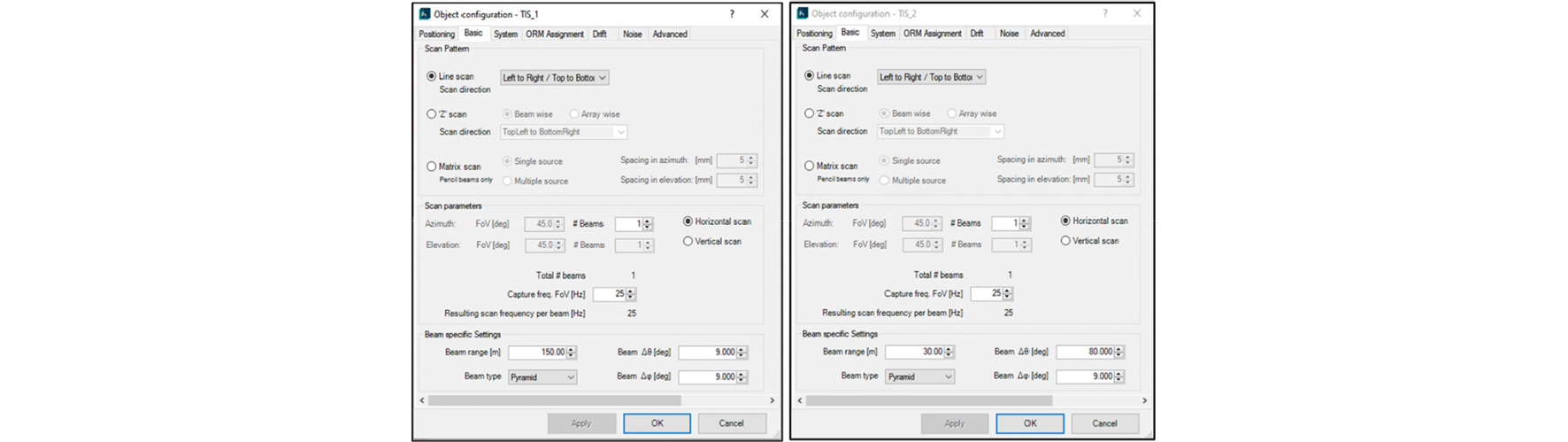
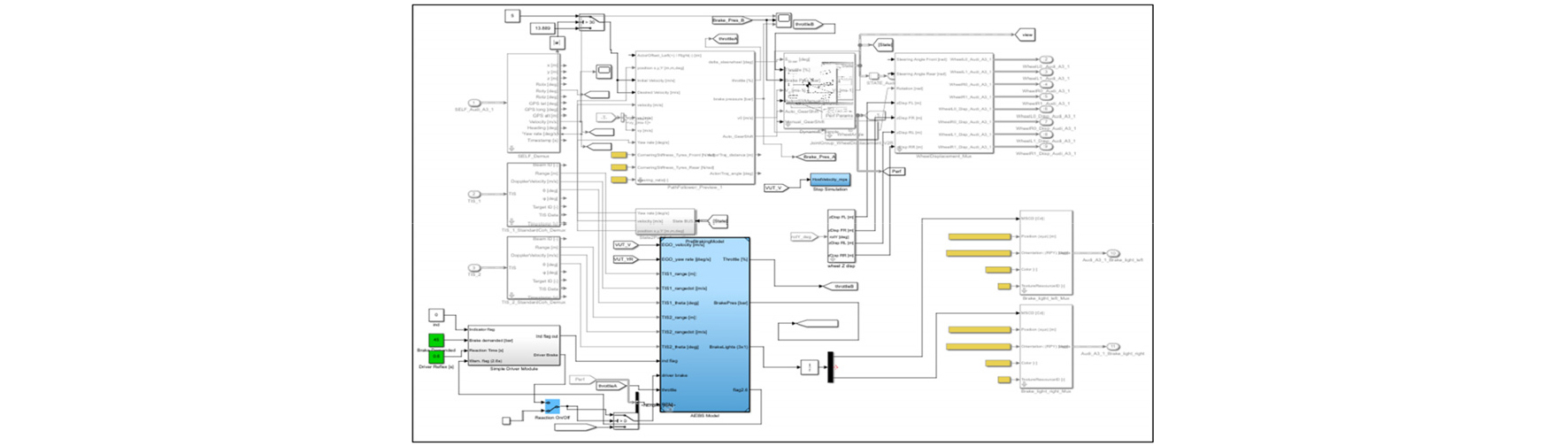
Fig. 6은 MATLAB/SIMULINK에서 최종 완성된 AEBS 모델이다. Prescan의 경우 MATLAB/SIMULINK에서 운영되기 때문에 센서로부터 받은 주변 환경의 정보를 이용하여 제어 알고리즘을 구성할 수 있다.
(12)해당 AEBS는 TTC(Time To Collision)에 의해서 작동 조건이 Table 4와 같이 구분된다. TTC는 상대 차량과 충돌이 일어나기까지 걸리는 시간을 뜻하며 자기 차량과 상대 차량 사이의 거리를 상대 속도로 나눈 값이다. Table 4에서처럼 작동 조건 구분 인자는 TTC이며 제어 변수는 Braking pressure이다.
Table 4.
AEBS operating conditions
|
TTC condition (sec) (TTC = relative distance / relative velocity) | AEBS Action |
| 2.6 | Warning |
| 1.6 | 40% Partial Braking |
| 0.6 | Full Braking |
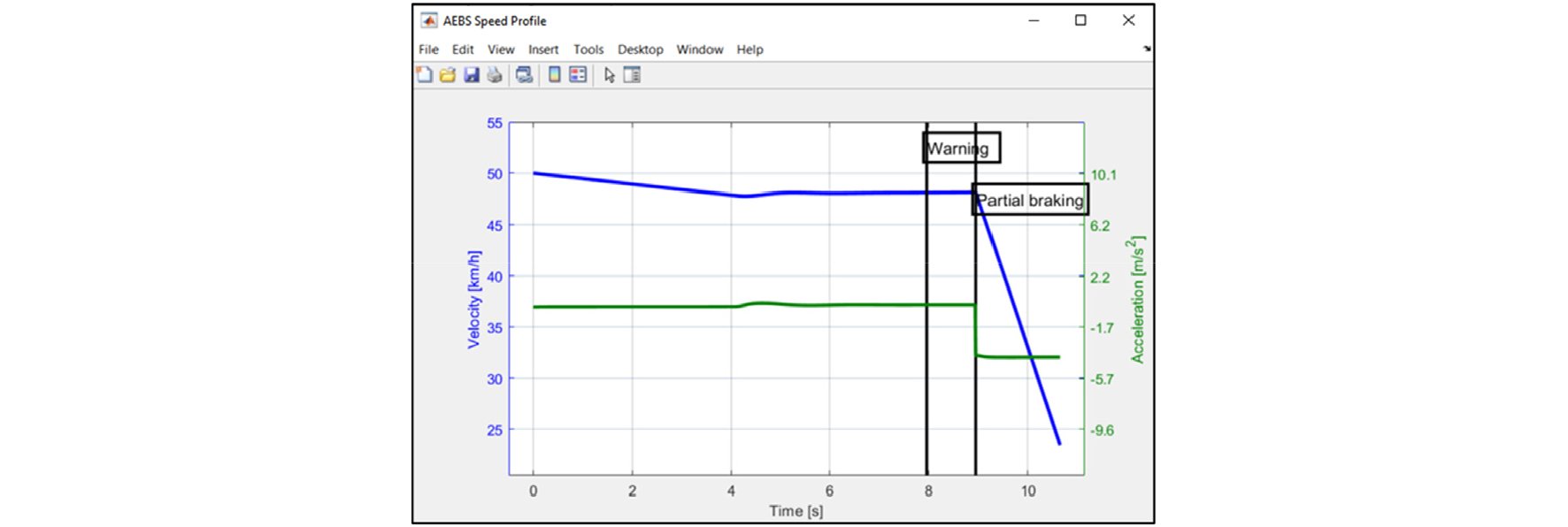
Fig. 7은 AEBS가 장착된 차량의 속도, 가속도 변화량의 기록이다. 자기 차량이 선행 차량보다 빠른 속도로 주행하여 이 둘 사이의 거리가 점점 줄어드는 시나리오이며 AEBS에 의한 Warning은 주행 시작 후 8초, Partial braking은 9초이다. Table 4에서의 Warning TTC와 Partial Braking TTC의 차이는 1초이고 시뮬레이션에서의 TTC 차이도 1초로 동일하므로 AEBS가 정상 작동하였고 그 결과가 합리적이라는 것을 확인할 수 있다.
2.2.3. 사고 유무 판별
교통사고 발생 시 승객 및 보행자의 상해치, 차량의 파손 정도로 경미 사고, 중증 사고 등으로 구분할 수 있다. 하지만 본 연구에서는 자기 차량 외에 어떠한 Object와 접촉만 발생해도 불안전한 요소로 간주하여 Unsafe case로 분류했다.
사고 유무 판별 시에는 Prescan의 Collision detection을 사용하였다. Fig. 8처럼 평상시에는 0의 값을 출력하지만 자기 차량과 Object의 접촉이 발생했을 시 Collision에 1의 값을 출력한다. Prescan에서는 각 Object 별로 고유 ID number를 부여하는데 Collision detection에서 인식된 ID number를 이용하여 자기 차량과 접촉이 발생한 해당 Object를 확인할 수 있다.

3. 결과 및 분석
3.1. 시뮬레이션 결과
본 연구에서는 SOTIF 표준 개발을 위한 초기작업인 DB 구축을 목적으로 실제 주행 환경과 여러 경우의 주행 시나리오를 시뮬레이션에 반영하고 그 결과를 통해 Safe / Unsafe factor를 구분하고자 하였다. IGLAD의 대표 유형을 선별하여 그 기준을 정의하고 시뮬레이션하였으며 결과를 요약하면 다음과 같다.
총 176개의 AEBS가 적용된 시나리오의 시뮬레이션 결과 중 91개의 시나리오에서 사고가 발생하였다. 각 세분된 시나리오의 시뮬레이션 결과는 다음과 같다.
Table 5를 살펴보면 총 176개의 시나리오 중 82개는 교차로(Junction)가 없는 단일 차도이고 94개는 로터리, 도로 합류 지점 등을 포함한 교차로라는 것을 알 수 있다. 각 상황별 전체 시나리오 중 사고가 발생한 비율을 Accident Rate(AR)이라고 할 때, 단일 차도(Single road)에서의 AR은 45.1%이고 교차로에서의 AR은 57.4%이다. 이 결과 교차로 상황에서의 AR이 단일 차도 상황의 AR보다 12.3% 가량 높으므로 교차로 상황이 상대적으로 Unsafe factor가 될 수 있다.
Table 5.
Simulation results of road type
| Safe | Unsafe | Total | AR (%) | |
| Single road | 45 | 37 | 82 | 45.1 |
| Junction | 40 | 54 | 94 | 57.4 |
Table 6은 주행 형태에 따른 시뮬레이션 결과값을 보여준다. 직선 주행(Straight)의 시나리오가 94개, 좌/우회전 및 차선 변경을 포함한 곡선 주행(Curve)의 시나리오는 82개이다. 직선 주행 시 AR은 44.6%이고 곡선 주행 시 AR은 58.5%이다. 이와 마찬가지로 직선 주행 상황보다 곡선 주행 상황에서의 AR이 14.2% 가량 높으므로 곡선 주행 상황이 Unsafe factor가 될 수 있다.
Table 6.
Simulation results of driving type
| Safe | Unsafe | Total | AR (%) | |
| Straight | 52 | 42 | 94 | 44.6 |
| Curve | 34 | 48 | 82 | 58.5 |
따라서, 본 연구에서 적용된 차량, Actor들의 속도, 센서 특성, AEBS 알고리즘에서는 교차로와 곡선 주행이 Unsafe Factor라고 예상할 수 있다.
3.2. 자기 차량과 상대 차량의 AEBS 동시 적용 결과
Fig. 9는 상대 차량의 AEBS 적용 여부에 따른 결과를 비교한 그림이다. 왼쪽은 303 케이스의 결과로써 자기 차량이 우회전 시 상대 차량에 인한 충돌이 발생하였다. 반면 상대 차량에도 AEBS를 장착한 경우에는 상대 차량이 자기 차량을 감지하여 정차하였기 때문에 오른쪽 그림과 같이 사고가 발생하지 않았다.

따라서, 같은 시나리오의 시뮬레이션일지라도 상대 차량의 AEBS 적용에 따라 그 결과가 달라질 수 있다는 것을 확인하였다. 따라서, 향후 자율주행 차량의 비중이 높아지는 것에 대비하여 자율주행 차량 대 자율주행 차량의 시나리오도 고려되어야 한다고 판단된다.
4. 결 론
본 연구를 통해 SOTIF 표준 개발을 위한 기초 DB가 완성되었다. 해당 DB에는 주행 상황에 따른 시나리오가 고려되었으며 센서, 주행환경을 반영함으로써 보다 정확한 결과 판단이 가능하다. 하지만, AEBS가 적용된 시나리오의 갯수가 Safe / Unsafe factor를 확연히 구분할 만큼 충분히 확보되지 않은 상황이다. 이뿐만 아니라 Safe / Unsafe factor의 판단 기준에 모호한 부분이 있다. 따라서, 현재의 다소 직관적인 판단 방식을 개선하기 위해 Unsafe factor를 도출하기 위한 체계화된 방법에 관한 연구가 필요하다고 판단하였으며 추후 연구에서 주행 안전성에 영향을 줄 수 있는 차량의 위치, 속도, 상대 거리 등을 단계별로 조절함으로써 DB를 확장할 계획이다.
SOTIF의 DB가 확장됨에 따라 (13)알고리즘 개발 단계에서 미처 고려되지 못한 CASE들을 발견하게 될 것이다. 또한, 실차 평가 전에 수많은 시나리오를 시뮬레이션 함으로써 실차 평가 시 발생할 수 있는 위험 요소들을 미리 제거할 수 있을 것이다. 결과적으로 SOTIF의 목적에 맞게 자율주행 차량의 안전성을 확보하게 될 것으로 사료된다.
