

1. 서 론
2. 자율주행 제어권 전환 상황
2.1. 제어권 전환 성능과 인적 요인
3. 연구 방법
3.1. 실험 참가자
3.2. 실험 장치
3.3. 실험 절차
3.4. 운전 행동 측정 변수
3.5. 분석 방법
4. 실험 결과
5. 토의 및 결론
1. 서 론
최근 국내외 자동차 업계를 중심으로 레벨3 자율주행자동차의 상용화가 본격적으로 진행되고 있다. 특히, 자동 차로유지 기능에 대한 국제 기준인 UNECE R157에서 최고 속도를 60km에서 130km로 상향함에 따라 레벨3 자율주행 자동차의 보급이 한층 빨라질 것으로 예상된다.(1)
이처럼 자율주행 기능이 확산될 경우, 더 이상 운전에만 집중하지 않고 비운전과업(Non-Driving Related Tasks)을 수행하는 운전자가 늘어날 수 있다.(2,3) 그러나 레벨3 자율주행 자동차는 정상적인 주행이 불가능한 비상 상황에 직면할 경우, 제어권 전환 요청(Take-Over Request, TOR)을 발생시켜 운전자가 위험 상황에 대응하도록 하는 안전 메커니즘을 전제로 개발되고 있다.(4,5) 즉, 비상 상황을 대처하는 주체(Fallback-ready user)는 운전자이며, 안전한 자율주행의 제어권 전환을 위해서 운전자의 상태가 중요한 변수가 된다.(6) 이러한 운전자의 상태는 상황인식(Situation awareness) 및 운전수행도(Driving performance)에 심각한 영향을 미칠 수 있다. 따라서, 상황 인식이 제어권 전환 및 안전 운전 능력에 미치는 영향을 체계적으로 살펴볼 필요가 있다.
자동차 인간공학 관련 선행연구에서는 자동화 수준이 높아질수록 운전자의 상황인식 능력이 감소하는 현상을 보고한 바 있으며, 자율주행이 운전행동에 미치는 영향에 대하여 정신적 부하, 운전자 상태, 상황인식 등의 관점에서 다양한 연구가 진행되었다.(6) 그러나, 성별과 연령 뿐만 아니라 주변 상황이 제어권 전환 수행도에 미치는 영향에 관한 연구는 부족한 실정이다. 즉, 인적요인 관점에서 제어권 전환 상황이 운전 행동에 미치는 영향에 관한 체계적인 연구가 필요하다.
따라서, 본 연구에서는 자율주행의 제어권 전환 상황별 시나리오가 운전행동에 미치는 영향을 성별과 연령을 고려하여 분석하고, 운전자 경험에 부정적인 영향을 미치는 제어권 전환 상황을 도출하고자 한다.
2. 자율주행 제어권 전환 상황
선행연구에서는 자율주행자동차의 제어권 전환을 제어권 전환을 요청한 주체와 제어권 전환이 완료된 이후 자동차를 제어하는 주체에 따라 정의하고 있다.(3,6) 즉, 주행 중 운전자가 자율주행자동차로 제어권을 전환한 경우는 제어권 이양(Hand-Over)으로 정의하고, 자율주행 중 자동차의 제어권 전환 요청에 따라 운전자가 제어권을 전환 받는 경우는 제어권 인수(Take-Over)라고 정의하였다. 특히, 자율주행 중 갑작스러운 제어권 인수 상황이 다른 제어권 전환 상황보다 위험하기 때문에, 본 연구에서는 제어권 전환의 정의를 제어권 인수 상황으로 한정하여 사용하고자 한다.
2.1. 제어권 전환 성능과 인적 요인
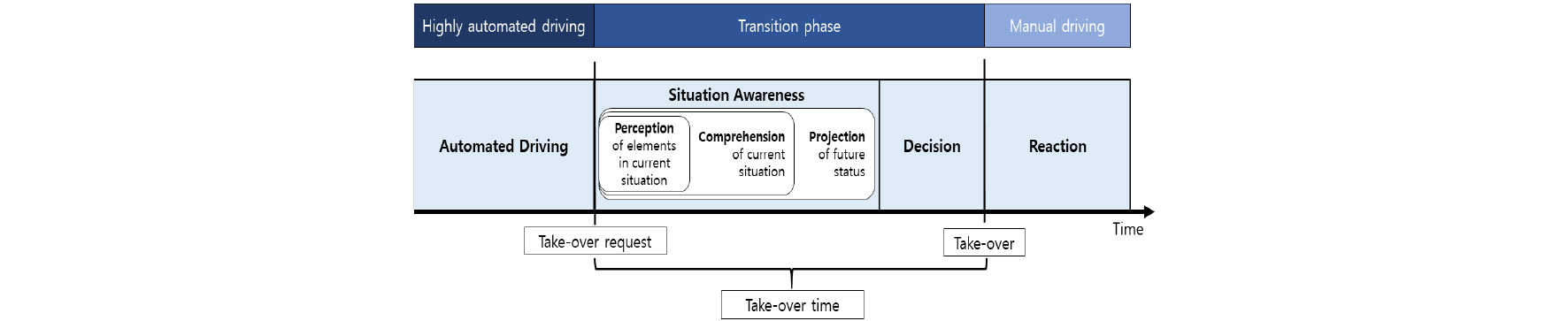
장시간 자율주행 이용에 따른 상황인식 감소는 위급상황에서 제어권 전환 성능을 저하시킬 수 있다.(6) 즉, 제어권 전환 요청이 발생할 경우 운전자는 Fig. 1과 같은 일련의 상황인식 과정을 거쳐서 적절한 대응 방법을 결정하고 이에 따라 대처하게 된다.(6) 따라서, 상황인식 능력이 감소된 상태에서는 판단을 내리기까지 더 많은 시간을 필요로 한다. 이와 같이 상황인식은 제어권 전환 성능에 많은 영향을 미치므로, 제어권 전환 안전성 평가 시나리오 개발 시 상황인식에 영향을 미치는 요인들을 고려할 필요가 있다. 제어권 전환에 영향을 미치는 상황인식 요인은 크게 상황 요인(Situational factors)과 운전자 요인(Driver factors)로 나누어 생각할 수 있다. 운전자 변수로는 연령, 성별, 운전경력 등이 있으며, 상황 변수로는 주행 환경의 복잡도, 비운전 과업 유형 등을 있다.(6) 예를 들어, 교통밀도가 높은 상황에서는 제어권 전환 능력에 저하될 수 있는데, 이는 주변 차량과 상호작용을 예측하여 의사결정 진행하여야 하는 과정에서 고려해야 할 경우의 수가 증가하기 때문이다.
이와 같이 다양한 상황인식 요인을 고려하여, 선행연구에서는 5종의 제어권 전환 기준 시나리오(3,7)를 아래와 같이 제시하였다.
- SN Straight - No Event): 계획된 제어권 전환
- SL(Straight - Missing Lane Marking): 직선로 차선불량
- CL(Curved - Missing Lane Marking): 곡선로 차선불량
- SO(Straight - External Obstacle): 직선로 고장차량
- SF(Straight - System Failure): 직선로 시스템 고장
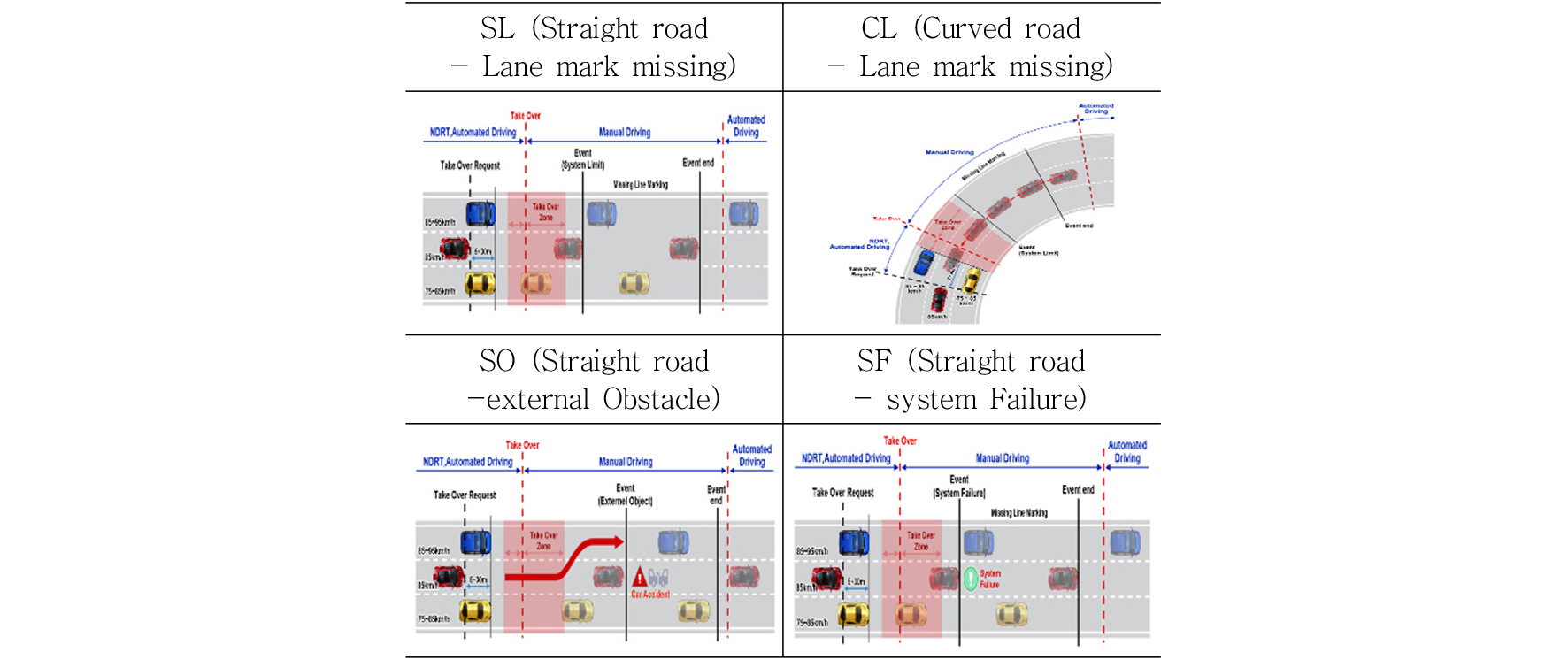
이중 아무런 이벤트가 없이 계획대로 제어권 전환을 실시하는 시나리오인 SN(Straight - No Event)을 제외한 4가지 시나리오를 Fig. 2와 같이 제시하였다. SL(Straight - Missing Lane Marking) 시나리오는 직선로를 자율주행하는 중 차선이 지워진 구간에 대응하기 위하여 제어권 전환요청이 발생한 경우이며, CL(Curved - Missing Lane Marking)은 곡선로에서 차선 불량 제어권 전환 요청이 발생한 경우이다. SO(Straight - External Obstacle)와 SF(Straight - System Failure)는 각각 직선로 자율주행 중 전방 고장 차량으로 인한 제어권 상황과 자차의 자율주행 시스템 고장으로 인한 제어권 전환 상황을 모사하였다.
해당 선행 연구에서는 제어권 전환 시나리오별로 긴급성(Urgency), 예측가능성(Predictability), 위험성(Criticality), 복잡성(Complexity), 안전성(Safety), 시간의 적절성(Time Budget), 정신적 부담(Mental workload), 신체적 부담(Physical workload)에 대한 주관적 분석을 실시한 결과, SO, CL, SF, SL 순서의 난이도를 가지는 것을 확인하였다.
본 연구에서는 선행연구에서 도출한 기준 시나리오를 이용하여 제어권 전환 상황이 운전 행동에 미치는 영향을 분석하고자 한다.
3. 연구 방법
3.1. 실험 참가자
본 실험에서는 일반운전자 25-50세와 고령운전자 65-75세를 각각 18명(남성: 9명, 여성: 9명)과 16명(남성: 9명, 여성: 7명)씩 총 34명을 모집하였다. 실험참가자의 평균연령은 일반운전자 그룹은 36.7세(표준편차: 5.6), 고령운전자대는 72.1세(표준편차: 4.4)이며, 일반운전자의 평균 운전 경력은 11.1년(SD = 5.8), 고령운전자는 29.5년(SD = 12.1)이다. 실험참여자는 주 3회 이상 정기적으로 운전을 하며, 교정시력 0.8 이상의 시력으로, 신체 및 정신적으로 건강한 사람들로 선정하였다. 실험 참가한 전체 피험자 34명 중 2명의 시뮬레이터 멀미와 2명의 데이터 부분 소실 등으로 인해 분석에서는 제외하였다.
3.2. 실험 장치
3.2.1. 모의주행 시뮬레이터
모의주행 시뮬레이터는 Fig. 3과 같이 5대의 빔프로젝터를 이용한 원통형 스크린과 운전 시뮬레이터, 그리고 제어용 PC로 구성되었다. 모의주행의 도로주행 환경은 Forum8사의 UC-win Road Driving Sim V.13을 사용하여 한국교통공단 자동차안전연구원의 고속주회로를 모사하였다. 자율주행의 기능으로는 적응형 속도 제어와 차선 유지 기능을 적용하였다.

3.2.2. 비운전과업(Non-driving related tasks)
레벨3 이상의 자율주행자동차 운전자는 정상적인 상황에서는 수동운전이나 모니터링 의무가 없으므로, 운전자의 상황인식 상태를 통제할 수단이 필요하다. 본 실험에서는 자율주행 중 비운전과업(NDRT, Non Driving Related Task)을 수행하도록 하여 운전자의 상태를 통제하였다. 본 실험에서는 시각적 주의분산을 유도하기 위한 NDRT로 SuRT(Surrogate Reference Task)를 사용하였으며, 시각적 리소스 요구량(Visual Demand)을 체계적으로 관리할 수 있으므로 ISO 표준으로 제정되어 있는 SuRT를 사용하여 실험을 진행하였다.(3)
3.2.3. 생체신호 측정
생체 신호는 Biopac MP 160 장치를 이용하여 측정하였으며, 운전자의 심리적 및 생리적 상태에 비교적 민감하게 반응하는 신호인 심박수(Heart Rate, HR)와 피부 전도도(Skin Conductance Level, SCL)를 선정하였다.(8)
3.3. 실험 절차
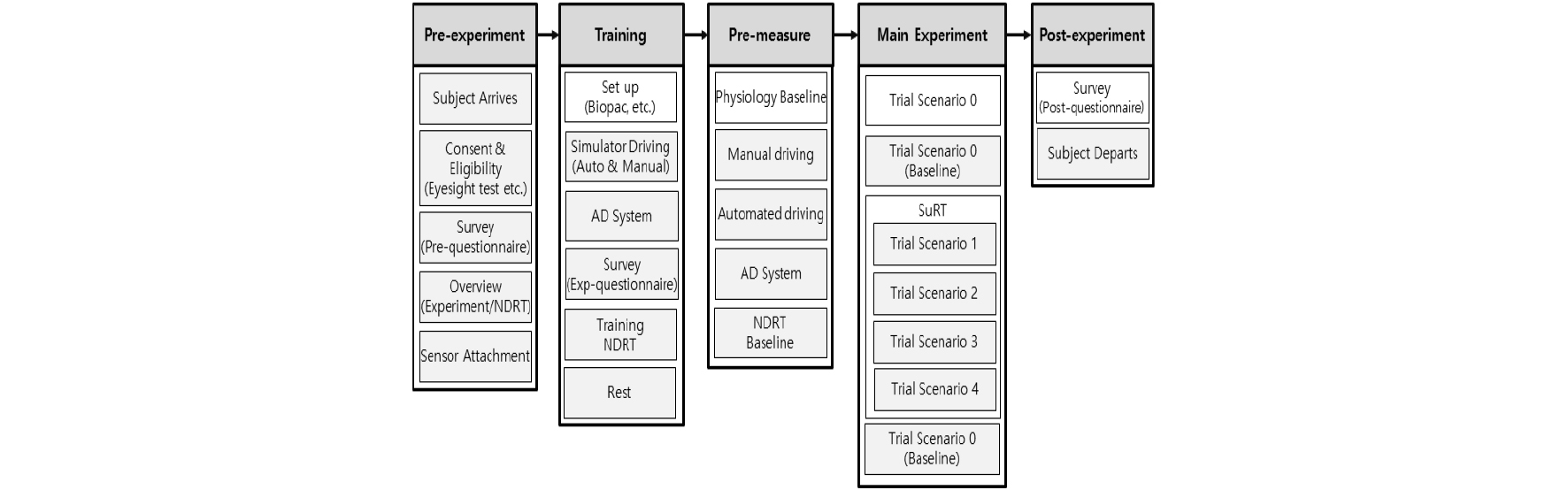
실험 절차는 Fig. 4와 같이 시뮬레이터 모의 주행 실험을 중심으로 실험 전 단계, 연습단계, 사전측정과 실험 및 실험 후 단계로 총 소요시간은 약 130분이며, 본 실험은 약 50분으로 구성하였다. 실험 전 단계에서는 실험 설명 및 동의, 센서 부착 및 사전 설문을 실시하며, 시뮬레이터 적응을 위한 주행 연습 시간 동안 수동 및 자율주행 운전을 충분히 연습할 수 있도록 하였다. 본 실험 단계에서는 자율주행 상태에서 5가지의 시나리오별 제어권 전환 요구가 포함된 모의 주행 실험을 실시하면서 운전자 반응을 관찰하였다. 또한, 운전자의 학습 및 예측 효과를 최소화하기 위하여 시나리오 순서, 발생 간격 등을 무작위로 구성하였다. 마지막으로, 실험 후 단계에서 사후 설문지를 작성한 후 실험을 종료하였다.
3.4. 운전 행동 측정 변수
제어권 전환 상황이 운전 행동에 미치는 영향을 분석하기 위하여, 운전제어권 전환 상황을 모사하는 시나리오(Scenario)를 집단 내(Within-subject) 변수로 선정하고, 연령과 성별을 운전자의 인적요인에 대한 집단 간(Between-subject) 변수로 선정하였다. 또한, 운전 행동의 변화를 관찰하기 위하여, 운전 능력 관련 변수로 브레이크 반응시간과 차선유지 표준편차를 선정하였으며, 생체 신호 관련 변수는 심박수의 표준편차와 피부전도도를 선정하였으며, 해당 변수를 아래와 같이 정의하여 측정하였다.
1) 브레이크 반응시간(Brake Reaction Time, BRT): 제어권 전환 요청이 발생한 시점부터 운전자가 브레이크 페달을 5% 이상 밟을 때까지 소요된 시간의 평균(단위: sec)
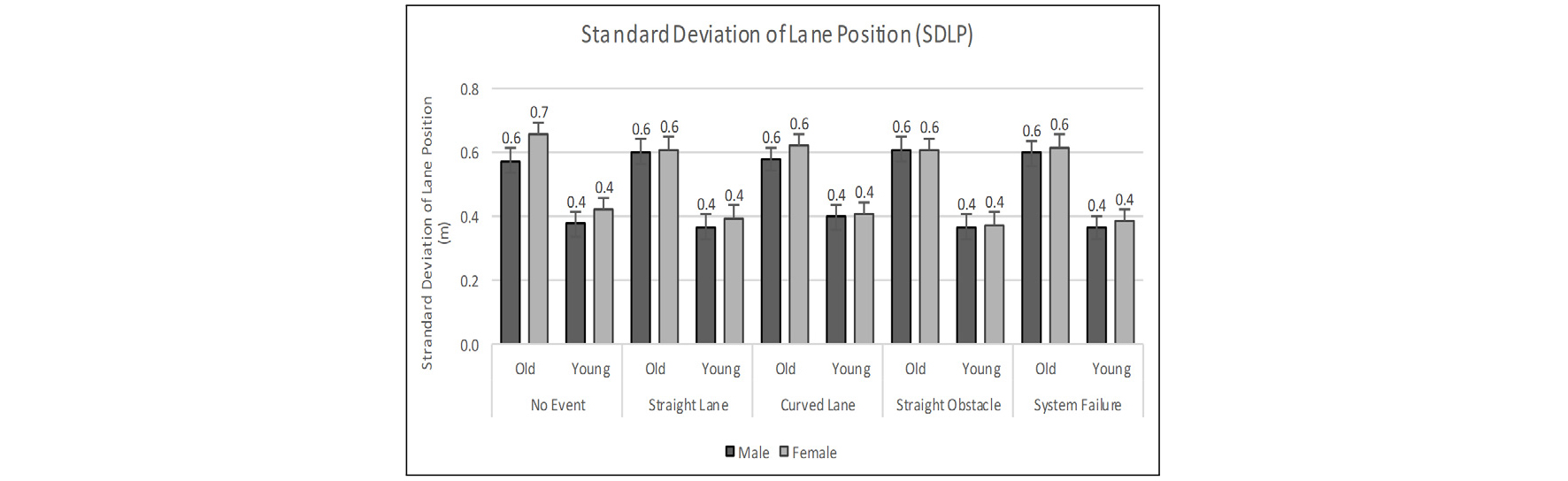
2) 차선유지 표준편차(Standard Deviation of Lane Position, SDLP): 제어권 전환 요청이 발생한 이후 운전자가 5도 이상 조향을 하기 시작한 시점부터 이벤트 종료 시점까지 차로 중심선 이탈 거리의 표준편차(단위: m)
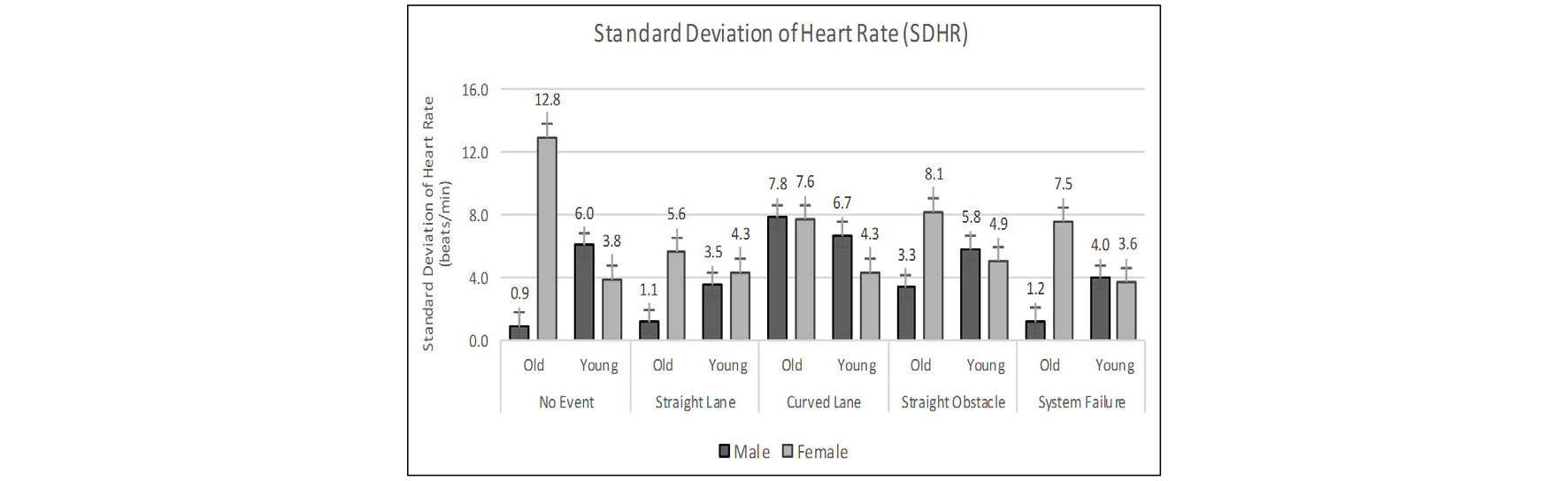
3) 심박수 표준편차(Standard Deviation of Heart Rate, SDHR): 제어권 전환 요청이 발생한 시점부터 이벤트 종료 시점까지 심박수의 표준편차(단위: beats/min)
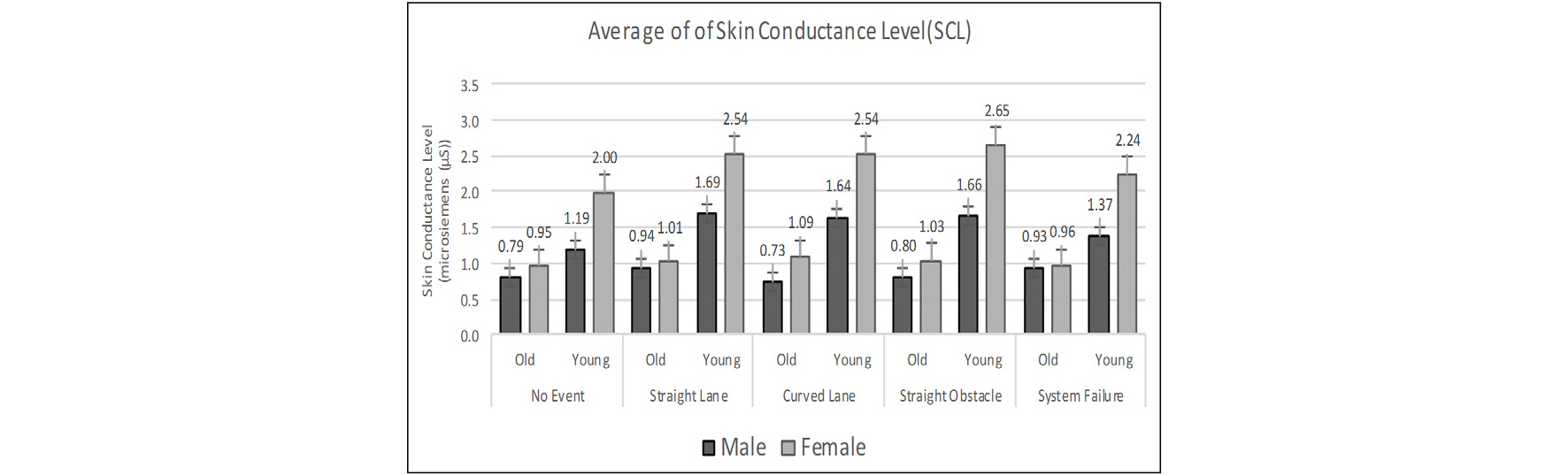
4) 피부전도도(Skin Conductance Level, SCL): 제어권 전환 요청이 발생한 시점부터 이벤트 종료시점까지 피부전도도의 평균(단위: microsiemens(μS))
브레이크 반응시간(BRT)(9)와 차선유지 표준편차(SDLP)(8,10)는 다양한 선행연구에서 운전 능력 평가 지표로 사용되고 있으며, 생체 신호 관련 변수인 심박수 표준편차(SDHR)와 피부전도도(SCL)은 운전자의 정신적 부하와 스트레스 측정 지표로 사용되고 있다.(10)
3.5. 분석 방법
본 연구는 SPSS를 이용하여, 선형 혼합 모형 분석을 실시하였다. 또한, 구형성 가정을 보정하기 위하여, 그린하우스-가이저(Greenhouse-Geisser)의 보정식을 적용하였다.
4. 실험 결과
실험결과는 Table 1과 같으며, 인적, 상황적 요인이 제어권 전환에 영향을 미치는 것을 확인하였다.
Table 1.
Statistical test results for the dependent measures
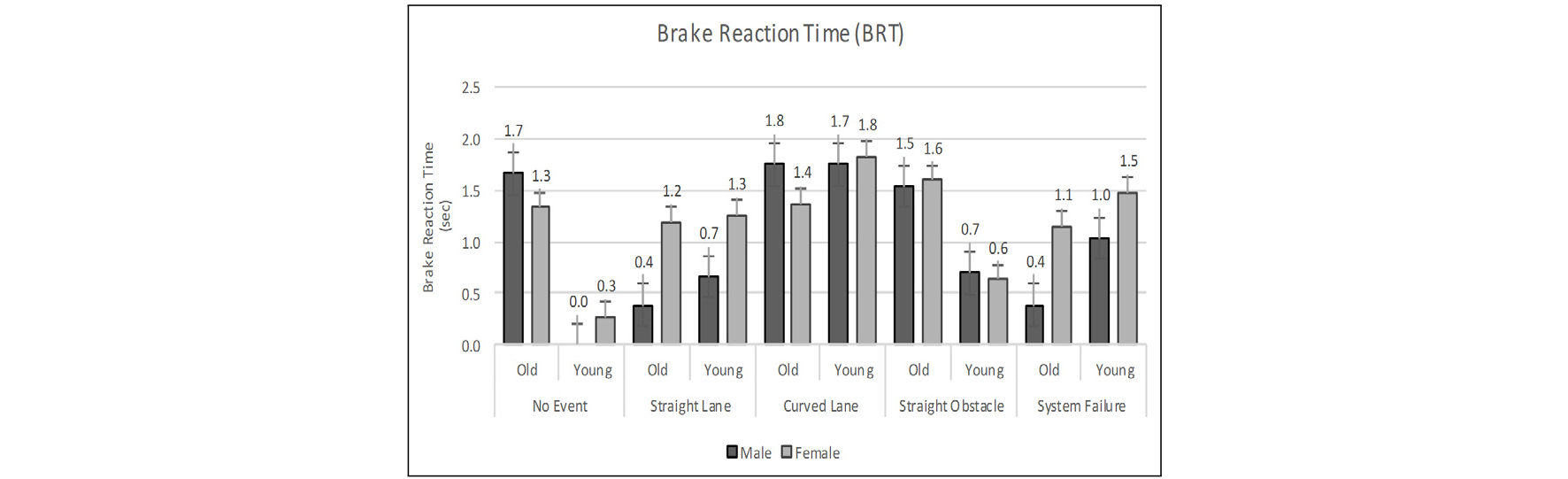
즉, 본 연구에서 제어권 전환 수행도를 분석하기 위한 변수로 사용된 브레이크 반응시간(BRT)와 차선유지 능력(SDLP) 중, 제어권 전환 반응 속도에 해당하는 BRT는 시나리오와 연령 간에 유의한 교호작용이 관찰되었다(Fig. 5). 이는 가장 난이도가 높은 시나리오인 직선로 고장차량(SO) 상황에서, 고령 운전자와 일반 운전자의 반응시간이 각각 평균 1.57초(S.D.:1.22)와 0.67초(S.D.:1.19)로 고령 운전자의 브레이크 반응 시간이 일반 운전자 보다 약 2.3배 가량 길게 소요되었기 때문이다.
또한, 제어권 전환 안정성에 해당하는 차선유지 표준편차(SDLP)는 Fig. 6과 같이 연령 간에 유의한 차이를 보였으며(고령: M=0.61, S.D.=0.15, 일반: M=0.38, S.D.=0.09), 이는 차선을 유지함에 있어서 고령 운전자가 일반 운전자 보다 약 1.6배 높은 변화폭을 보였기 때문이다. 즉, 제어권 전환시 일반 운전자는 평균적으로 차선 중심에서 약 0.38m가량을 벗어난 반면, 고령 운전자는 약 0.61m를 벗어났다.
다음으로, 운전자의 스트레스 등 심적 부담감을 나타내는 SDHR은 Fig. 7과 같이 연령과 성별의 교호작용이 유의하게 나타났다. 즉, 고령 여성운전자는 계획된 제어권전환 요청상황(SN), 고장차량 발생상황(SO), 시스템고장 상황(SF)에서 다른 그룹에 비하여 높은 SDHR 값을 보였다.
마지막으로, 긴장감 등 정신적 부하를 나타내는 변수로 사용한 SCL은 시나리오에서 유의한 차이를 보였다. 즉, Fig. 8에서와 같이 직선로 차선불량(SL), 곡선로 차선불량(CL), 직선로 고장차량(SO) 시나리오에서 높은 SCL 값이 관찰되었다.
5. 토의 및 결론
자율주행 제어권 전환 상황과 인적요인(연령, 성별)이 제어권 전환 수행도에 미치는 영향을 분석한 결과, 연령과 상황별 시나리오가 유의한 영향을 미치는 것을 확인할 수 있었다.
특히, BRT와 SDLP에서 유의한 차이가 관찰된 것은 고령화가 진행됨에 따라, 운전자들이 브레이크 반응속도(9)와 차선유지 능력(8,10)이 저하된다는 선행 연구 결과와 일치함을 확인할 수 있다. 또한, 브레이크 반응 시간에 대하여 제어권 전환 시나리오와 연령 간에 유의한 교호작용이 관찰되었다. 이는 고령운전자의 경우, 난이도가 높은 제어권 전환 상황에서는 브레이크 반응속도가 더욱 느려질 수 있다는 것을 의미하며, 제어권 전환에 따른 위험성이 더욱 증가할 수 있다는 점에 주의를 기울일 필요가 있다.
다음으로, 운전자의 스트레스나 긴장감을 나타내는 지표를 살펴본 결과, 심박수 변화량(SDHR)에서 연령과 성별 간의 교호작용이 유의하게 나타났으며, 고령의 여성운전자가 제어권 전환에 심적 부담을 느끼는 것을 확인할 수 있었다. 이는 여성운전자는 지능형 안전경고 시스템에 대하여 부정적인 효과를 보인다는 선행 연구(10)과 유사한 결과로 볼 수 있다. 또한, 피부전도도(SCL)에서는 시나리오에 따른 유의한 차이가 있었으며, 난이도가 높은 전환 시나리오에서는 높은 피부전도도가 관찰되었다. 즉, 특별한 이벤트로 인하여 계획되지 않은 제어권 전환이 발생할 경우, 더 높은 스트레스와 긴장감을 보이며 결과적으로 부정적인 사용자 경험을 가지게 될 수 있다.
이상과 같이 제어권 전환 상황이 운전자의 반응에 미치는 영향을 분석한 결과, 고령운전자가 제어권 전환에 따른 안전에 취약할 수 있음을 확인하였다. 즉, 일반적으로 고속주행을 하는 고속도로 상에 정차된 고장 차량과 같이 예측하기 어렵고 긴급한 상황에서 고령운전자의 제어권 전환 수행도가 더욱 떨어질 수 있기 때문이다. 특히, 자율주행 차량에서 전방 객체를 탐지하기 위해 사용하는 레이다 센서의 경우, 정지 물체에 대한 감지 성능이 낮아 고장 차량 시나리오(SO)에 효과적으로 대응하지 못 하는 문제를 초래할 수 있다. 따라서, 제어권 전환이 필요한 자율주행 자동차를 고령자가 운전하고 있을 경우, 적절한 수준의 상황인식이 유지될 수 있도록 주기적으로 전방 주시를 유도하고 충분한 제어권 전환 시간을 제공할 필요가 있다.
여성운전자의 경우, 제어권 전환 수행도에 영향을 미칠 수 있는 차이점은 관찰되지 않았으나, 부정적인 사용자 경험을 초래할 가능성이 높은 것으로 나타났다. 즉, 제어권 전환 상황이 발생할 경우 상대적으로 높은 심적 부담을 느낄 수 있으므로, 제어권 전환 상황을 최소화할 수 있는 보수적인 자율주행 제어 전략을 적용할 필요가 있다.
결론적으로, 자율주행 중 제어권 전환 요청이 발생할 경우, 고령 운전자는 운전 수행도 저하에 따른 안전도 문제가 발생할 수 있으며, 여성 운전자의 경우 스트레스로 인한 부정적인 사용자 경험을 초래할 수 있음을 확인하였다. 따라서, 자율주행 자동차 설계시, 일반운전자의 특성뿐만 아니라 고령 운전자와 여성 운전자의 특성을 반영하여 안전성과 수용성을 제고하여야 한다.
