

1. 서 론
2. EDR 데이터 검증을 위한 차량 시험 방법
3. EDR 데이터 검증
3.1. 아반떼(MD)와 K5(TF) 충돌 시험 결과
3.2. 싼타페(DM) 충돌 시험 결과
3.3. 쏘나타 하이브리드 충돌 시험 결과
4. 전기차 EDR의 모터 속도 데이터 한계값
5. 결 론
1. 서 론
교통사고 분석에서 가장 중요한 정보는 충돌 이전 차량의 상태이다. 차량의 속도와 위치 정보로 차량의 경로를 재구성하여 차선 변경 여부와 충돌 회피 가능성을 분석한다. 최근 사고 분석에서는 운전자의 물체 인지 시점과 위험 판단 시 운전자의 반응을 분석하여 과실 여부를 특정하는 요구도 증가하고 있다. 또한 운전자가 의도하지 않은 가속의 발생 여부가 중요한 사회적 문제로 대두되고 있다. 차량의 속도와 위치 등 차량 상태 정보는 영상으로 추정하는 방법이 사용되지만 운전자의 차량 작동 상태는 차량 내부 데이터에서만 확인 가능하여 사고 분석이 제한적이었다. 그러나 사고기록장치(EDR: Event Data Recorder)의 적용확대로 운전자의 차량 작동 상태를 분석할 수 있게 되어 교통사고 분석에 범위가 확장되었다.
EDR은 2012년 12월 교통사고 분쟁의 해소와 정보 공개의 필요성으로 관련 규정이 제정되고 2015년 12월 19일부터 자동차관리법 29조 3에 의거하여 관련 법령이 시행되어 시행 후 생산되는 대다수의 차량에 EDR이 적용된다. 미국에서는 미국도로교통안전국 NHTSA CHR Part 563이 제정되어 2012년 9월 1일부터 EDR 설치 권고와 기록정보의 표준안이 시행되었다.
EDR은 차량에 일정 조건의 사고 또는 물리적 외력이 발생 시 이벤트를 기록하고 기록되는 정보는 이벤트 발생 시점(T0)을 기준으로 5초 이전 시간 동안 0.5초 단위로 이벤트 발생 이전 차량정보와 T0부터 0.3초 동안 이벤트 발생 이후 차량정보를 기록하도록 기록정보 표준안이 규정되었다. 기록되는 차량 정보는 차량 속도, 스로틀 열림량, 가속 페달 변위량, 제동 페달 작동여부, 진행방향의 가속도 등 15개의 필수 항목과 30개의 선택 항목으로 규정되었다. 법령 시행 후 EDR의 효용성이 입증되어 기록항목을 추가하는 법안이 2025년에 시행될 예정이다.
EDR에 기록된 데이터는 다양한 교통사고 분석에 활용되고 있으며, 사고 분석 시 EDR 신뢰성은 매우 중요한 요소이므로 EDR 데이터의 신뢰성에 대한 연구가 진행되었다. EDR 데이터의 신뢰성을 검증하기 위하여 실제 센서를 장착하여 측정한 값과 EDR 데이터를 비교하는 연구와 차량 통신 데이터와 EDR 데이터를 비교하는 연구가 진행되었다.
2008년식 Ford Edge와 Focus의 VBOX로 측정한 속도와 EDR에 기록된 속도를 비교 시 오차는 1.1~1.3%로 확인되었다.(1) 2010년식 Ford Flex의 정속 주행과 제동 조건에서 EDR에 기록된 차량 속도 분석 시 정속 주행 조건에서는 0.1~2.7 km/h의 오차가 확인되고 감속 조건에서는 3.0~6.8 km/h로 속도 오차가 증가하는 것이 확인되었다.(2) 이외에도 다양한 제조사의 차량으로 특정 조건에서 EDR에 기록된 차량 속도를 평가하는 연구가 진행되었다.(3,4)
EDR은 ACU(Airbag Control Unit)에 포함된 기능으로 분산형 제어기의 CAN(Controller Area Network) 데이터를 기록하는 방식을 사용하므로 CAN 데이터와 EDR에 기록된 데이터를 비교하여 검증하는 연구가 수행되었다.(5) Brown과 White는 2010년식과 2012년식 캠리의 HS-CAN 데이터와 EDR에 기록된 차량 속도, 엔진 속도, 제동 페달 신호를 정속 주행과 감속 주행 조건에서 비교하였다.(6,7) ACU 부품에 CAN 신호를 생성하여 입력하는 방법으로 EDR 데이터를 반복적으로 생성하여 CAN 데이터와 EDR 데이터를 비교 분석한 연구도 진행되었다.(8)
현대/기아의 EDR은 2013년부터 데이터 추출 장비 사용이 가능하여 2010년식부터 2012년식까지 차량의 EDR 데이터 검증 연구가 수행되었고 이후 연식의 차량은 IIHS의 small overlap 시험 결과로 차량 속도와 EDR 데이터를 비교하는 연구가 수행되었다.(9~11) 현대/기아 차량의 차량 통신 데이터와 EDR 데이터를 비교하는 연구는 2010년식부터 2012년식 차량에 대한 연구만 진행되어 NHTSA 49 CFR part 563이 규정된 2012년 이후 차량에 대해서도 EDR 데이터 정확도 검증이 요구된다. 이에 따라 본 연구에서는 현대/기아의 2013~2015년식 4차종을 선정하여 CAN 통신 데이터 분석하고 저속 배리어 충돌 시험으로 EDR 데이터를 생성 후 정확도를 분석하였다. EDR 정확도 분석 시 오차뿐만 아니라 사고 해석에 필요한 특징을 분석하였다. 또한, 전기차 EDR의 데이터 신뢰성에 대하여 사례를 기반으로 분석하였다.
2. EDR 데이터 검증을 위한 차량 시험 방법
EDR 데이터 검증 시험을 위해 국내 자동차 시장에서의 점유율, 엔진타입, 사고 빈도 등을 고려하여 시험 차종을 선정하였으며, 선정한 차종과 연식은 Table 1에 정리하였다.
Table 1.
Test vehicle information
| Vehicle model | Model year | Engine type | ACU |
| Avante MD | 2013 | Gasoline | Mobis |
| K5 TF | 2014 | Gasoline | Mobis |
| Sonata YF | 2014 | Hybrid | Mobis |
| Santafe DM | 2013 | Diesel | Autoliv |
EDR 데이터 분석을 위하여 특정조건에서 ACU에 직접 충격을 가하여 EDR 기록 알고리즘이 활성화되도록 하는 연구가 있었으나, 본 연구에서는 실험차를 직접 주행하여 고정벽에 저속으로 충돌함으로써 EDR의 기록알고리즘이 활성화되는 최소 속도와 충격량을 확인하고 각 차량을 3회씩 반복 충돌 시험하여 데이터 오차 발생을 감소시켰다. 고정벽 충돌실험장은 Fig. 1과 같이 주행로에 시멘트 방호벽을 설치하여 충돌 시 이벤트가 발생할 수 있게 하였으며, 주행로에 폭 1 m 간격의 격자무늬를 표시하여 조향 핸들 각도 변화에 따른 차량 이동경로를 분석하였다. Fig. 2와 같이 모든 시험차량에 충돌 시험 시 에어백과 프리텐셔너가 전개되는 것을 방지하고 반복적으로 시험하기 위하여 에어백과 프리텐셔너의 커넥터에 저항을 연결하여 전개 및 에러 발생을 방지하였다. Vbox(RACELOGIC, 20 Hz), 드론(inspire T600), dashcam video(Lukas) 등을 장착하여 시험차의 진행경로, 속도, 가속도 데이터를 측정하였다. OBD(On Board Diagnostics)통신 데이터를 CAN 인터페이스를 사용하여 데이터를 로깅하였다.

3. EDR 데이터 검증
NHTSA 49 CFR part 563에 자동차용 사고기록장치의 저장항목에 대한 단위, 정밀도, 해상도, 측정범위, 저장시간 등이 명시되어 있으며 시험차량의 EDR 데이터에 기록된 항목의 정보는 Table 2와 같다. EDR 사고 이전 정보에 기록되는 차량 속도, 엔진 속도, 제동 페달 작동여부, 스로틀 밸브 열림량, 가속 페달 변위량, 조향핸들 각도의 CAN ID와 메세지를 분석하여 측정하고 충돌 시 기록된 EDR 데이터와 비교하였다. CAN신호는 10 hz 주기로 측정되었으며 해상도는 Table 3과 같다.
Table 2.
Data element of EDR
Table 3.
CAN data recording resolution
| Data element | Frequency (Hz) | Resolution |
| Indicated vehicle speed | 10 | 1 km/h |
| Engine speed | 0.5 rpm | |
| Engine throttle | 0.39% | |
| Accelerator pedal | 0.47% | |
| Service brake | ON / OFF | |
| Steering input | 0.1 degree |
3.1. 아반떼(MD)와 K5(TF) 충돌 시험 결과
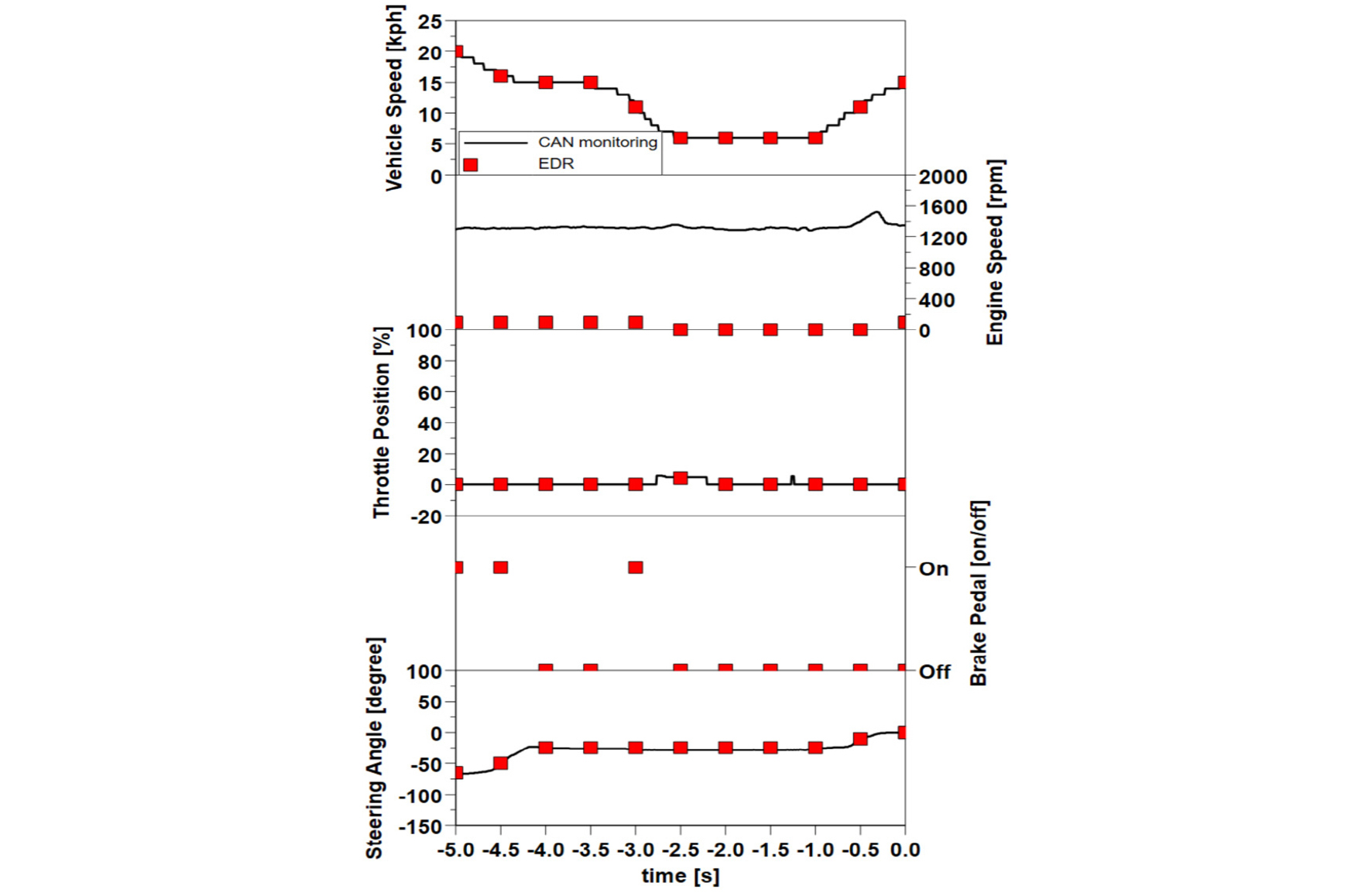
아반떼와 K5의 충돌 시험 결과에서 차량속도, 스로틀 밸브 열림량, 제동 페달 작동여부, 조향핸들 각도 항목에 대하여 EDR 데이터에 기록된 데이터와 차량 통신에서 측정한 CAN 데이터를 비교 시 EDR 기록 분해능 단위 이외의 오차는 나타내지 않는 것이 확인된다(see Fig. 3 and Fig. 4).
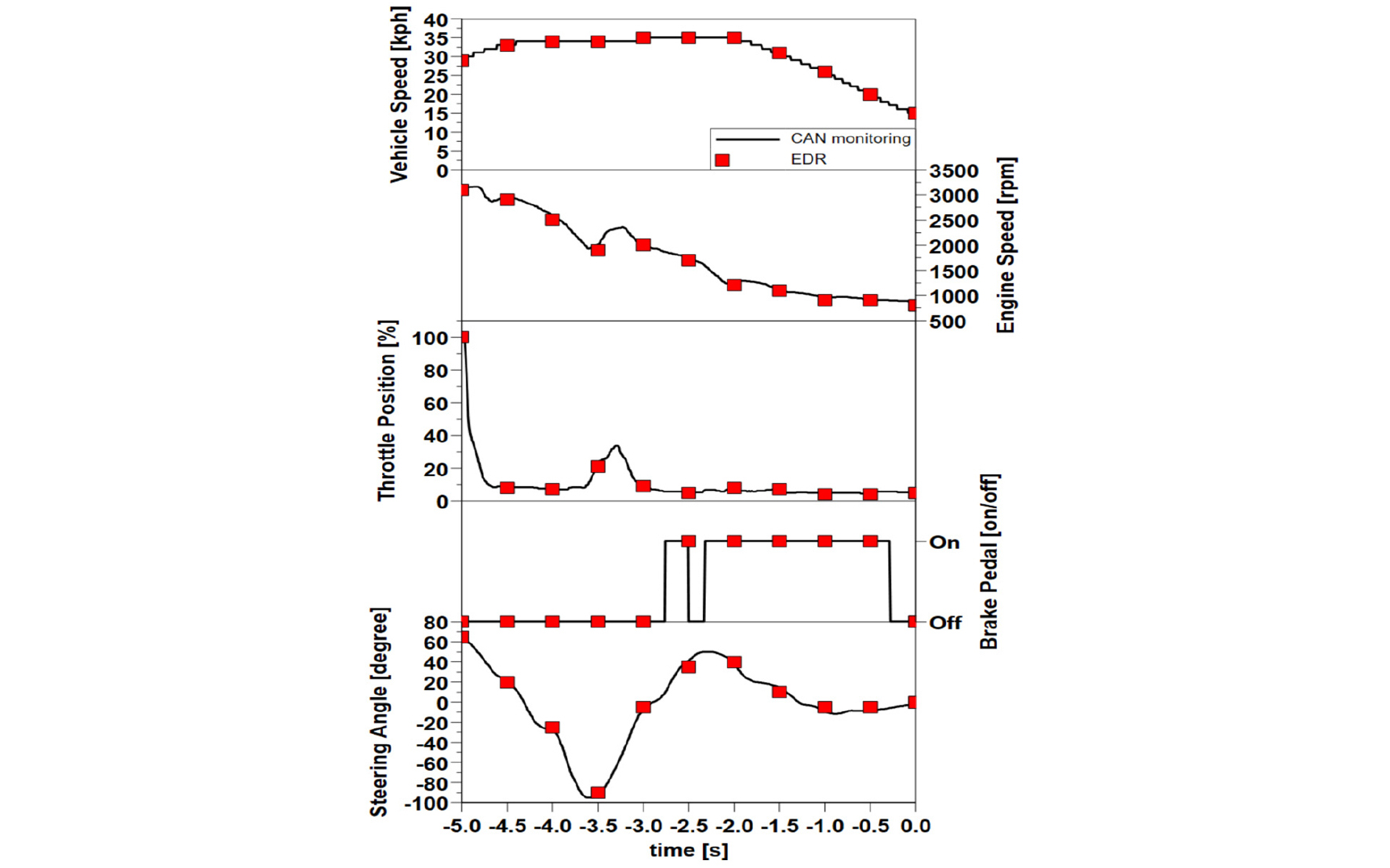
EDR 의 차량 속도, 엔진 속도, 스로틀 밸브 열림량, 조향 핸들 각도 값의 양수 데이터는 CAN 데이터를 기준으로 분해능 단위에 내에서 내림하여 기록하고 조향 핸들 값의 음수 데이터는 올림하여 기록되는 것으로 확인된다.
3.2. 싼타페(DM) 충돌 시험 결과
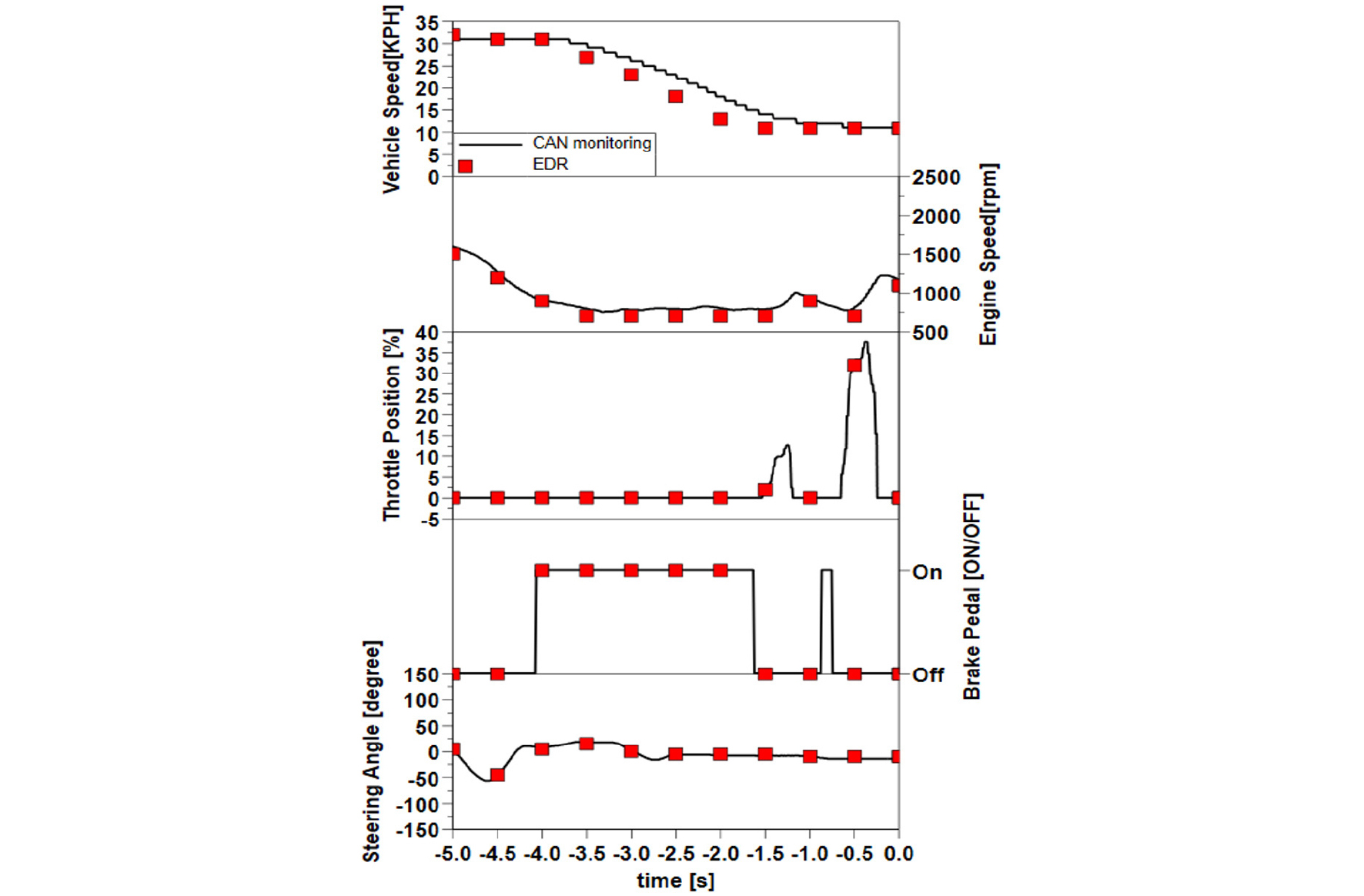
Fig. 5에서 싼타페의 EDR 데이터와 차량 통신 데이터를 비교 시 EDR에 기록된 차량 속도가 CAN 데이터보다 낮게 기록되었다. 측정한 CAN 데이터의 차량속도는 전륜 우측 휠 속도를 기준으로 모니터링하였으나, EDR에 기록되는 차량속도는 각 휠의 속도, 클러스터 표기 속도 등을 입력 받아 기록하므로 이에 따른 차이가 나타난 것으로 분석된다. 싼타페 감속 구간 시험결과에서만 EDR에 기록된 차량속도와 CAN 데이터의 차량속도 차이가 발생하는 것은 전륜 우측 휠센서의 지연 또는 실제 전륜 우측 제동력 차이로 측정한 속도 값이 차이가 발생하였을 것으로 추정된다. 브레이크 신호의 경우 이벤트 발생 약 -0.9초에서 -0.7초사이에 ON되었다가 OFF된 것이 차량 통신 데이터에 기록되었으나 EDR 데이터에는 기록되지 않은 것이 확인된다. 이와 같은 특성에서 EDR 데이터는 각 이벤트 기록 시점 사이의 데이터의 평균을 기록하는 것이 아니라 기록 시점의 데이터를 기록하는 것으로 분석된다. 이외의 항목은 EDR에 기록된 데이터와 차량 통신에서 측정한 데이터를 비교 시 EDR 기록 분해능 단위 이외의 오차는 나타내지 않는 것이 확인된다.
3.3. 쏘나타 하이브리드 충돌 시험 결과
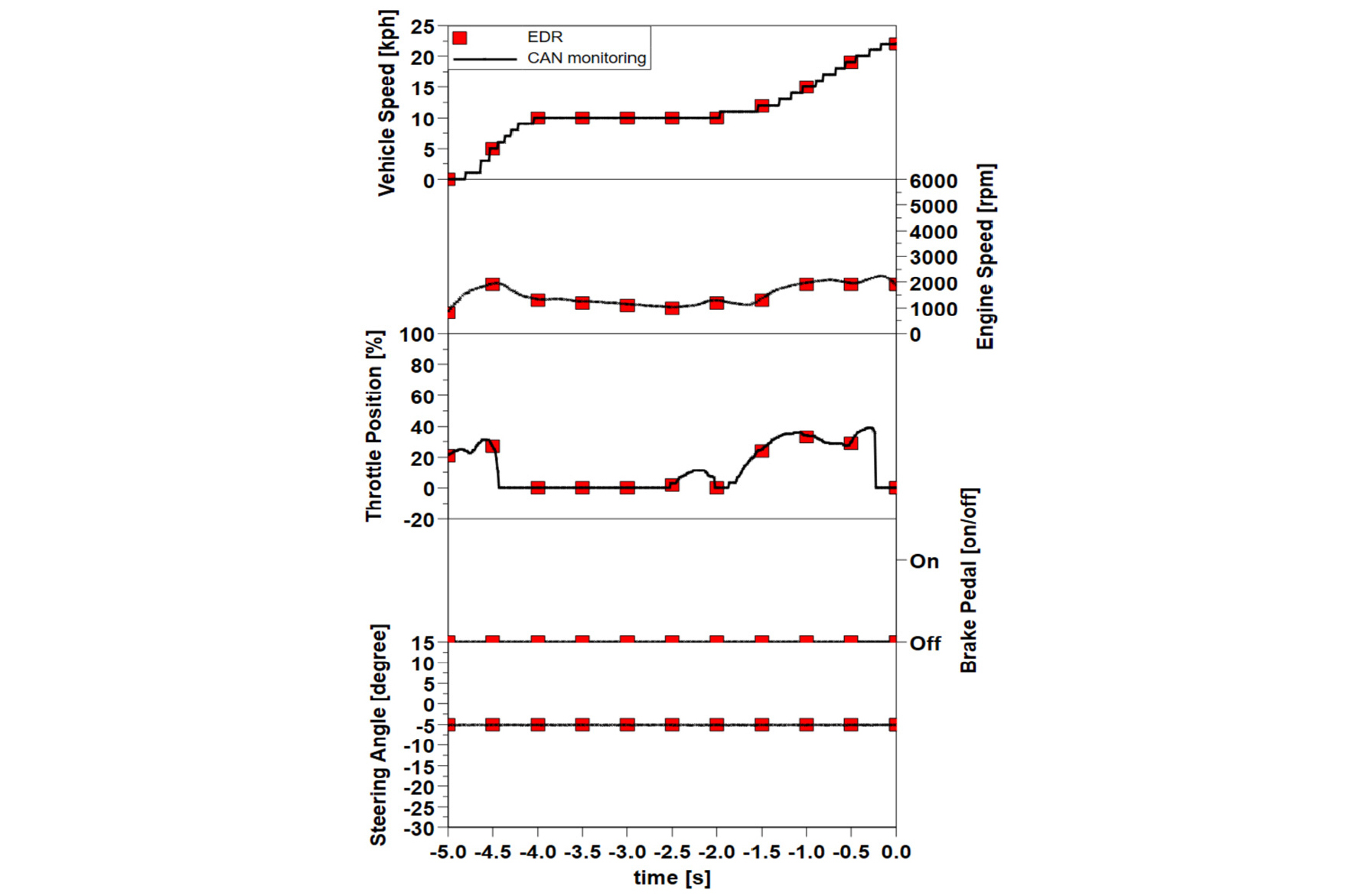
쏘나타 하이브리드는 TMED(Transmission Mounted Electric Device) 방식의 하이브리드로 엔진과 모터 사이에 엔진 클러치가 장착되어 EV모드로 주행하거나 회생제동 시 엔진 클러치가 해제되어 엔진의 동력이 바퀴로 전달되지 않는 구조를 갖고 있다. Fig. 6은 충돌 시험 시 계기판을 촬영한 것으로 충돌 약 6~7초 이전에 EV모드가 활성화 되고 EV모드 상태에서 충돌한 것이 확인되며, 충돌 시 충격으로 변속 레버가 D->N으로 이동하여 EV모드가 해제되는 것이 확인된다. Fig. 7에서 쏘나타에 기록된 사고이전 차량정보와 차량 통신 데이터를 비교 시 EDR의 데이터 기록 분해능에 의한 오차만 확인된다. EV모드 주행으로 엔진 클러치가 해제된 상태로 충돌하여 차량 통신의 엔진 속도는 실제 엔진의 속도를 나타내고 EDR 데이터에 나타난 엔진 속도는 변속기 입력축 속도를 기록한 것으로 확인된다. 쏘나타의 제동신호는 차량통신에서 확인하지 못하여 EDR 데이터와 검증하지 못하였다.

4. 전기차 EDR의 모터 속도 데이터 한계값
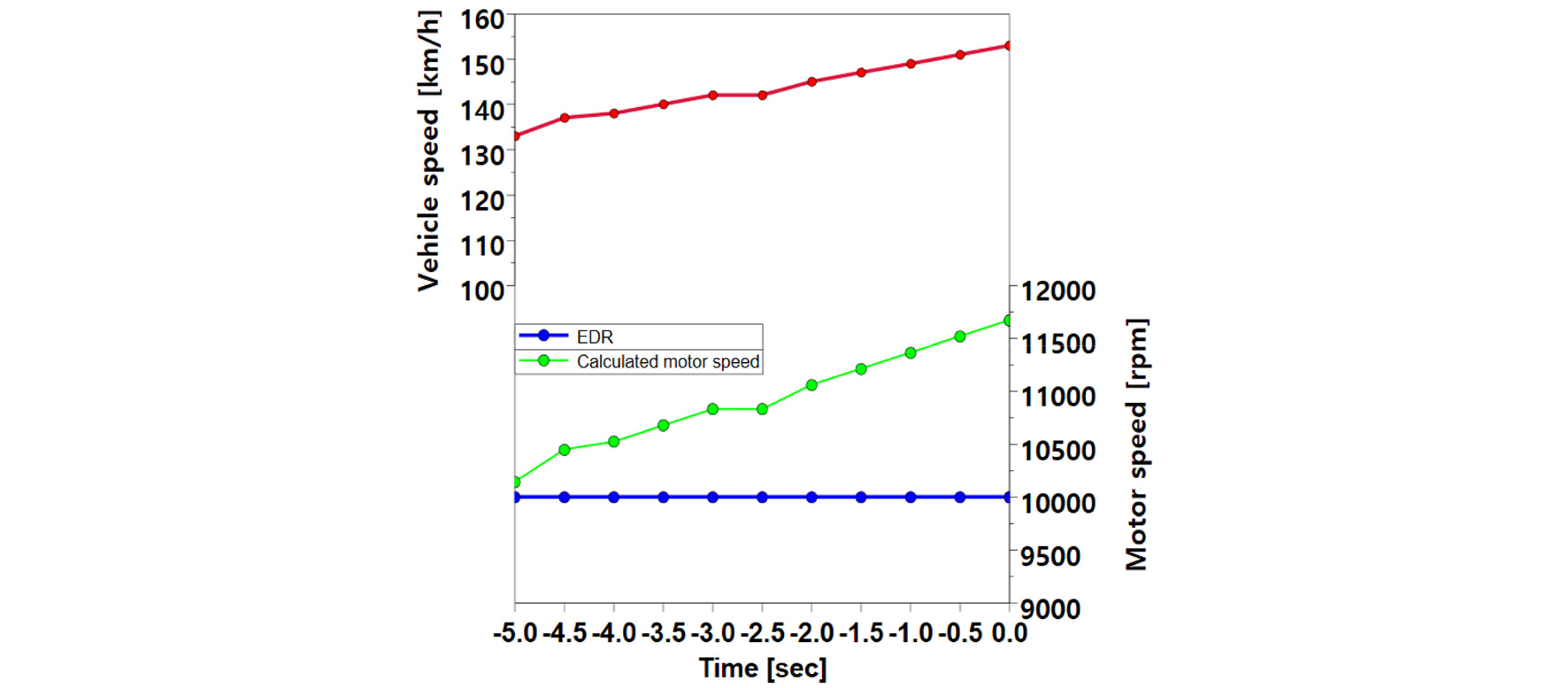
전기차의 EDR은 엔진 속도 항목에 구동 모터 속도를 기록한다. 현재 양산되는 대부분의 전기차 전동화 시스템은 구동 모터와 감속기로 구성되어 변속 시스템을 사용하지 않는다. 2022년식 아이오닉 5의 130 km/h이상 고속 주행 시 기록된 EDR 데이터를 Fig. 8에 나타내었다. 충돌 전 기록된 모터 속도는 T-5.0부터 T0까지 모두 10,000 rpm으로 기록되어 있으나, 차량 속도는 133 km/h에서 153 km/h까지 상승한다. 아이오닉 5의 구동 모터 최대 속도는 17,900 rpm으로 감속기 기어비 10.65와 타이어 235/55 19를 적용하여 모터 속도를 계산하면 차량 속도 131 km/h에서 모터 속도가 10,000 rpm이 된다. 따라서 사고 이전 실제 아이오닉 5의 모터 속도는 10,000 rpm 이상이고 EDR의 모터 속도 한계값이 10,000 rpm으로 선정된 것이 확인된다. 모터 속도가 10,000 rpm의 한계값을 갖는 것은 Fig. 9와 같이 NHTSA CFR49 part 563이 규정되는 시점에 전기차의 도입을 고려하지 않아 EDR 기록항목인 엔진 속도의 기록 범위를 0~10,000 rpm으로 선정했기 때문이다. 이후 전기차에 동일한 규정을 적용하였으나, 전기차 구동 모터는 고속 영역에서 10,000 rpm 이상으로 구동되어 한계값 이상의 값이 기록되지 않는다. 따라서 전기차의 고속 주행 사고 해석 시 전기차에 적용된 전동화 시스템의 감속비와 타이어 스펙으로 모터 속도를 계산하여 충돌 이전 구동 모터 상태를 분석하여야 한다. 또한 EDR에 기록된 구동 모터 속도 한계값은 규정에 따라 기록된 것이므로 EDR의 신뢰성과 무관하다.

5. 결 론
본 연구에서는 EDR 데이터의 신뢰성을 평가하기 위하여 4종의 차량을 선정하여 저속 베리어 시험으로 EDR 데이터를 생성하고 차량 통신 데이터와 비교하였다. EDR 데이터를 검증한 결과와 사고 해석에 유용한 결과를 요약하면 다음과 같다.
1) EDR 데이터의 경우 기록 시점에 차량 통신 데이터를 기록하고 제동페달 작동여부, 가속페달, 스로틀 밸브 열림량, 조향핸들 각도값은 차량 통신 데이터와 비교 시 분해능 단위 이내의 오차를 갖는다. 그러므로 사고 이전 운전자의 페달 작동과 차량 작동 상태에 대하여 EDR을 사용하여 신뢰도 높게 분석할 수 있다.
2) EDR의 차량 속도, 엔진 속도, 스로틀 밸브 열림량, 조향 핸들 각도 값의 양수 데이터는 CAN 데이터를 기준으로 분해능 단위 내에서 내림하여 기록하고 조향 핸들 값의 음수 데이터는 올림하여 기록된다.
3) 제동 페달 신호가 EDR 기록 시간 분해능인 0.5초 사이에 on/off 되면 EDR에 off로 기록된다. 차량 충돌 시 관성으로 0.5초이내에 제동등이 점등되었다가 소등되는 사례의 EDR에 제동 페달 신호가 OFF로 기록 가능하다.
4) NHTSA CFR49 part 563의 엔진 속도 기록 범위의 최대값이 10,000 rpm으로 규정되어 전기차 구동 모터 속도가 10,000 rpm이상인 속도에서 EDR이 기록되면 10,000 rpm으로 기록되고 이는 규정을 따른 것으로 EDR의 신뢰성과 무관하다.
