

1. 서 론
최근 자율주행 기술이 빠른 속도로 발전되어 왔고, 자율주행을 통하여 구현 가능한 주행 기능의 범위가 넓혀져 왔다. 자율주행의 신뢰성을 높이기 위하여, 거동 계획 알고리즘은 충돌 안전성 및 교통 법규 준수를 고려하여 설계되어야 한다. 특히, 보행자들은 교통약자로 분류되며 사고로부터 특별히 보호해야 하는 교통 참여자로서 취급된다. 대한민국 교통법에는 차량이 비신호 횡단보도에 접근 및 통과할 시 서행해야 한다고 규정되어 있다. 또한, 비신호 횡단보도에서 횡단 중인 보행자가 존재하는 경우 차량을 정지선 앞에 정차하여야 한다. 따라서, 비신호 횡단보도 환경에서 교통 법규 준수 및 보행자와의 충돌 방지를 위한 자율주행 차량의 가/감속 거동계획 알고리즘이 개발되어야 한다.
많은 연구자가 비신호 횡단보도에서의 보행자 대상 안전 문제에 대하여 차량 관점에서 논의해 왔으며,(1) 해당 환경에서의 위험도 및 보행자 행동 패턴을 정량적으로 분석해왔다.(2,3) 자율주행 차량의 보행자 대상 가/감속 거동을 구현하는 연구들 또한 많이 진행되어 왔다. Gu, Y.는 보행자의 행동 분석으로 도출된 예측 행동에 따라서 자율주행 차량의 속도 프로파일을 선정하는 연구를 진행하였다.(4) Saito, Y.는 Potential Field 개념을 활용하여 보행자 대상 위험 예측 및 자율주행 차량의 예측 감속을 구현하였다.(5) Xu, S.는 보행자 대상 양보 혹은 통과 모드를 Time To Collision(TTC) 기반으로 결정하고, 각 모드에 따라 자율주행 차량의 정지 위치를 결정하고 최적 속도 프로파일을 도출하는 연구를 진행하였다.(6) Zhu, H.는 자율주행 차량의 비신호 횡단보도 보행자 대상 모드 결정 및 가/감속 제어에 대한 규칙 기반 방법론과 강화학습 기반 방법론을 제시하였다.(7)
본 연구에서는 비신호 횡단보도에서의 자율주행을 위한 가/감속 거동 계획 알고리즘을 제안한다. 제안된 알고리즘은 차량이 비신호 횡단보도 접근 시 서행하는 거동 및 횡단 보행자 존재 시 정지 거동을 자율주행 기반으로 구현한다. 해당 알고리즘은 자율주행 중소형 버스 차량에 적용되어 실차 실험을 통해 성능이 검증되었다. 2장은 전체 알고리즘의 구조, 3장은 주행 모드 결정, 4장은 주행 제어 알고리즘을 다룬다. 이어서 5장은 시뮬레이션 결과, 6장은 실차 실험 결과, 7장은 본 연구의 결론 및 향후 연구 계획을 다룬다.
2. 알고리즘 구조
본 연구에서는 정지선 위치, 주변 차량과 보행자 상태, 주행 경로 및 차량 센서 정보가 주어졌다는 가정 하에 거동 계획 알고리즘이 실행된다. 알고리즘의 결과값으로서 자율주행 차량의 가속도 입력이 출력되고, 이는 차량 구동기에 전달되어 가/감속 거동이 실현된다.
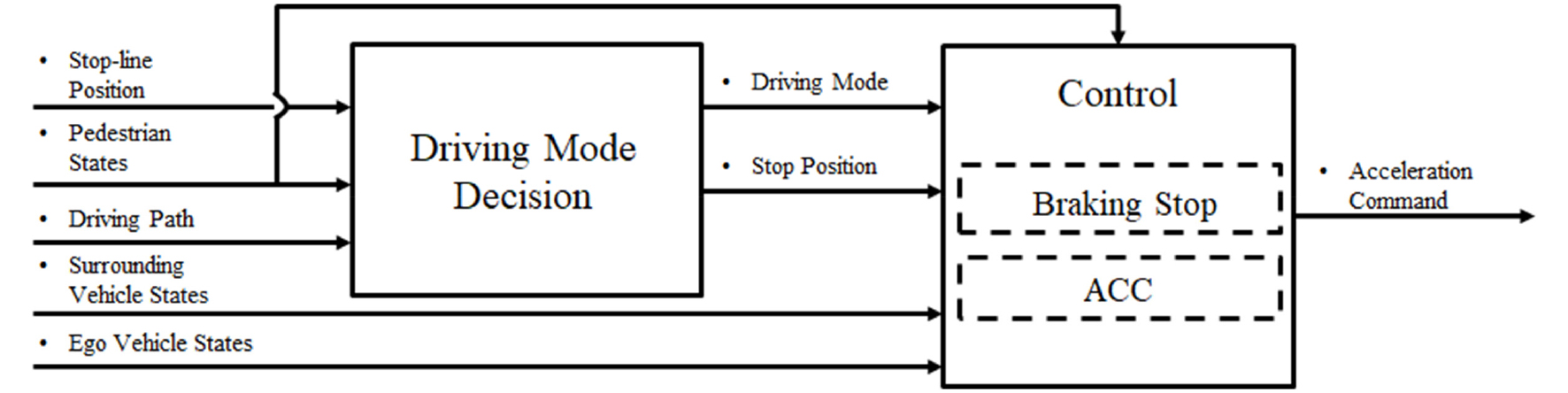
해당 알고리즘의 전체 구조를 Fig. 1에 나타내었다. 본 알고리즘은 주행 모드 결정 및 주행 제어 모듈로 구성되어 있다. 주행 모드 결정 모듈은 자율주행 차량의 정지선 대상 정차 혹은 통과 여부를 결정한다. 주행 제어 모듈은 정차 거동 및 통과 거동을 위한 자율주행 차량의 가속도 입력을 도출한다. 주행 모드가 정지 모드로 결정되었거나 정지선 앞에 정지 물체가 존재할 경우, 차량을 정차시키기 위한 Braking Stop 제어가 수행된다. 그 외의 상황의 경우, 목표 속도 추종 혹은 차간 거리 유지를 위한 Adaptive Cruise Control(ACC) 제어가 수행된다.
3. 주행 모드 결정
차량이 정지선에 접근 시 해당 정지선에 대한 정지 모드가 활성화된다. Fig. 2에 나타내어진 바와 같이, 정지선 접근 시작과 동시에 타이머가 초기화된다. 이때, 정지선 접근은 차량이 정지선으로부터 40 m 이내의 거리에 있는 상태를 의미한다. 타이머의 초기화 이후, 타이머가 작동되기 시작하고 잔여 시간이 감소하게 된다. 정지선 주변 관심 영역 내에 횡단 보행자가 존재하는 경우, 보행자가 관심 영역을 이탈할 때까지 타이머의 잔여 시간이 고정된다. 타이머의 잔여 시간이 모두 소진되면, 해당 정지선에 대한 통과 모드가 활성화된다. 만약 정지선에 접근한 이후로 정지선 근처에 횡단 보행자가 존재하지 않을 경우, 타이머에서 잔여 시간의 고정 과정 없이 잔여 시간을 감소시킨다. 이에 따라 차량이 완전하게 정지하기 전 통과 모드가 활성화됨으로써 서행 거동이 구현된다.

Fig. 3과 같이, 보행자의 횡단 여부는 보행자 인지 결과를 통해 도출된 헤딩각과 주행 경로 사이의 각 φ을 비교하여 결정된다. 보행자 헤딩각과 주행 경로 사이의 각이 수직에 가까울 경우, 보행자의 이동 방향과 횡단보도가 나란하다고 간주할 수 있다. 이를 반영하여 식 (1)과 같은 조건을 설계하였다.

ε은 기준값 상수이다. 식 (1)의 조건을 충족하는 보행자가 관심 영역 내에 있는 경우, 횡단 보행자가 존재한다고 간주하여 정지 모드 결정에 활용된다. 따라서, 정지선 위치, 보행자의 상태, 주행 경로를 활용하여 자율주행 차량이 비신호 횡단보도에 접근 시 정지 또는 통과 모드가 결정된다.
4. 주행 제어 알고리즘
비신호 횡단보도 대상 정지 또는 통과 모드가 결정된 이후, 각 모드에 따른 가/감속 제어 전략을 수행한다. 주행 모드가 정지 모드이거나 정지선 앞에 정지 물체가 존재하는 경우, Braking Stop 제어가 수행되어 목표 정지 위치에 정차하기 위한 감속 제어 입력이 도출된다. Braking Stop 제어 알고리즘은 피드포워드 및 피드백 항을 적용하여 설계되었다. 제어 입력 도출을 위한 식을 식 (2)에 나타내었다.
anom은 공칭 가속도를 의미한다. c와 v는 Braking Stop 알고리즘 발동 중 목표 정지 위치 및 차량의 속력을 의미한다. cref 및 vref는 차량 상태에 따른 정지 위치로부터의 레퍼런스 거리 및 레퍼런스 속력을 의미한다. k1과 k2는 cref와 vref의 추종 에러에 대한 피드백 게인이다. 이때, 목표 정지 위치는 정지선 위치와 정지 물체 대상 정지 위치 중 자 차량과 더 가까운 위치로 적용한다. 공칭 가속도 및 레퍼런스의 계산은 식 (3)과 같다.(8)
db,0와 v0는 Braking Stop 제어 알고리즘 발동 시작 시점의 목표 정지 위치 및 차량의 속력이다.
주행 모드가 통과 모드이고 정지 물체가 존재하지 않는 경우, ACC 제어가 수행된다. ACC 제어 알고리즘에서는 목표 속도 추종 및 차간 거리 유지 수행을 위한 가/감속 입력이 도출되며, 제약 조건을 동반한 유한 시간 내 비용 함수 최적화를 수행하는 모델 예측 제어 기법이 활용되었다. 본 연구에서 ACC 제어를 위한 모델 예측 제어 문제는 식 (4)와 같이 설계되었다.
J는 비용 함수, Np는 예측 horizon, x는 이동 거리 p, 속력 v, 가속도 a로 구성된 상태 변수, xref는 상태 변수 x의 레퍼런스, u는 제어 시스템의 가/감속 제어 입력을 의미한다. Q, Ru, RΔu은 레퍼런스 추종 오차, 가/감속 제어 입력 사용, 가/감속 제어 입력의 변화를 최소화하도록 유도하는 가중치이다. umin, umax는 가/감속 제어 입력의 최소치 및 최대치이며, Δumin, Δumax는 가/감속 제어 입력 변화의 최소치 및 최대치이다. pmax는 전방 물체의 위치를 이용해 도출된 이동 거리의 최대 한계이다. A, B는 제어 시스템의 시스템 행렬로, 식 (5)와 같이 정의된다.
Δt는 이산화된 동역학 시스템의 샘플링 시간, τ는 차량 액츄에이터의 가/감속 추종에 대한 반응의 1차 시간 상수를 의미한다. xref는 식 (6)과 같이 정의된다.(9)
pego는 자율주행 차량이 현재 시간 스텝으로부터 매 스텝마다 속력 vref를 적용하였을 때의 이동거리를 의미한다. sd는 목표 안전 거리, ptar와 vtar는 각각 전방 물체의 예측 위치 및 속력을 의미한다. vset는 목표 속력을 의미한다. 식 (6)은 자율주행 차량이 전방 물체와의 목표 안전 거리를 유지하고 속력에 적응하기 위한 목적으로 설계되었다. 따라서, 비신호 횡단보도 대상으로 주행 모드에 따라 Braking Stop 또는 ACC 제어가 수행되어 교통 법규 준수 및 충돌 안전성 보장을 위한 거동이 구현된다.
5. 시뮬레이션 결과
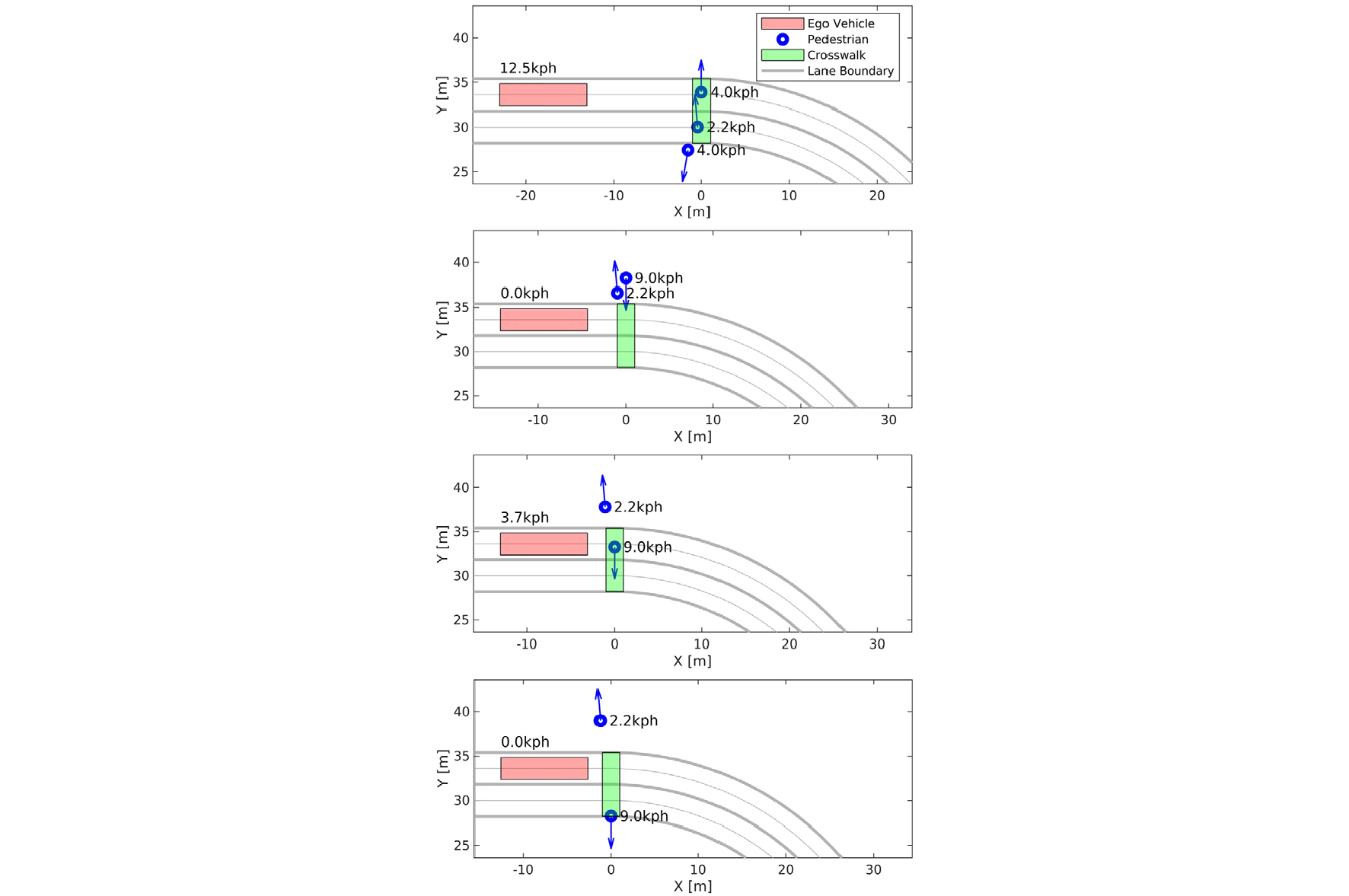
본 연구에서 제안한 거동 계획 알고리즘의 성능은 다수의 보행자가 혼재된 비신호 횡단보도 환경을 상정한 시뮬레이션 기반으로 검증되었다. 시뮬레이션 시나리오는 다음과 같이 2종의 시나리오로 정의하였다:
Scenario 1: 3명의 보행자가 동시에 횡단한다. 이 중 1명의 보행자는 나머지 2명의 보행자에 비해 낮은 속도로 횡단한다.
Scenario 2: 3명의 보행자가 동시에 횡단한다. 마지막 보행자가 횡단을 마친 후, 뛰어오는 다른 한 명의 보행자가 추가로 횡단한다.
Scenario 2는 Scenario 1의 상황을 모두 마친 후 새로운 보행자가 등장하는 상황과 같다. 해당 시나리오들은 도심로에서 차량 주행 중 높은 빈도로 맞이할 수 있는 주행 상황임을 고려하여 결정되었다. 시뮬레이션 환경은 MATLAB/Simulink를 활용하여 구성되었다.
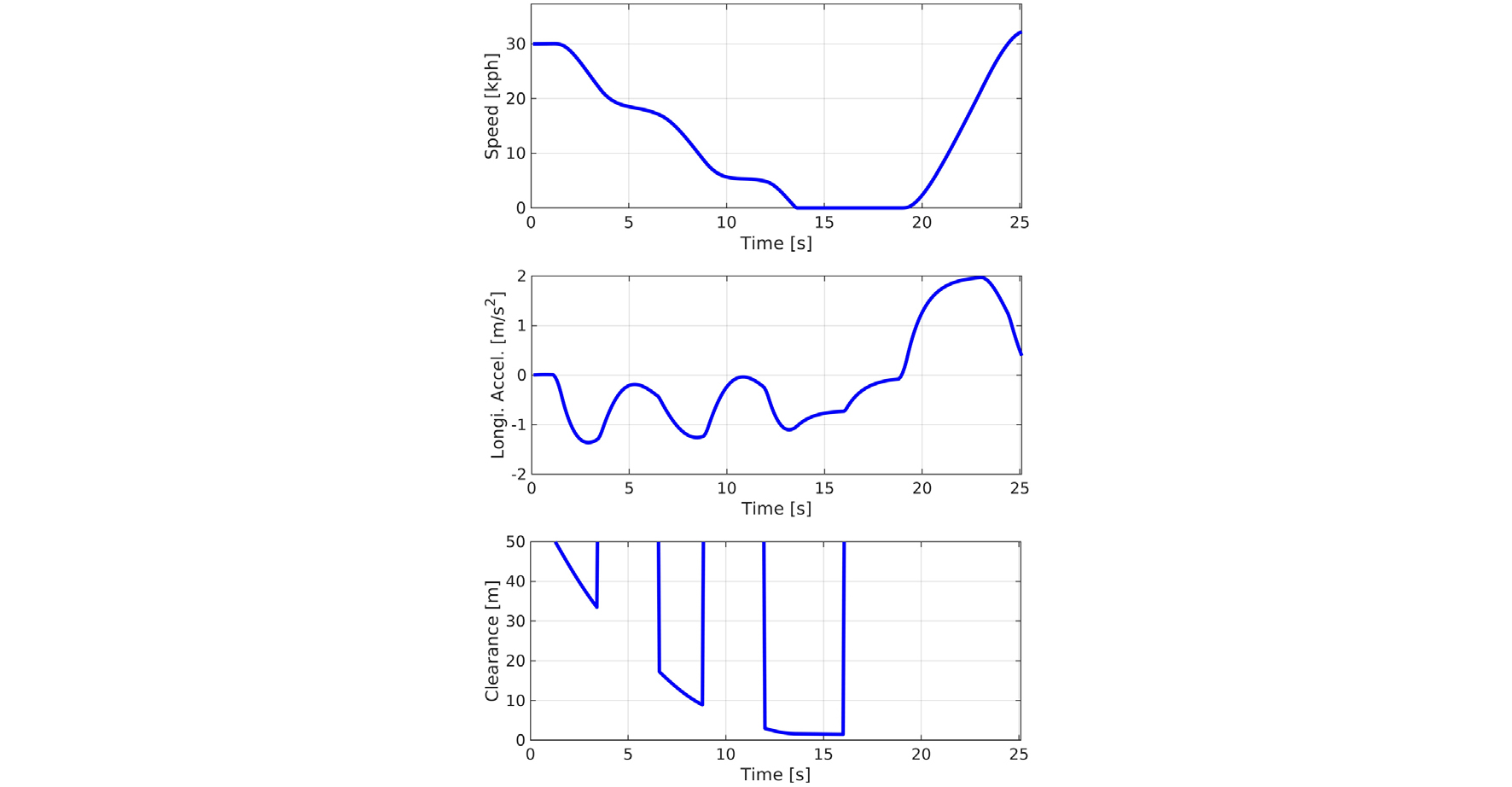
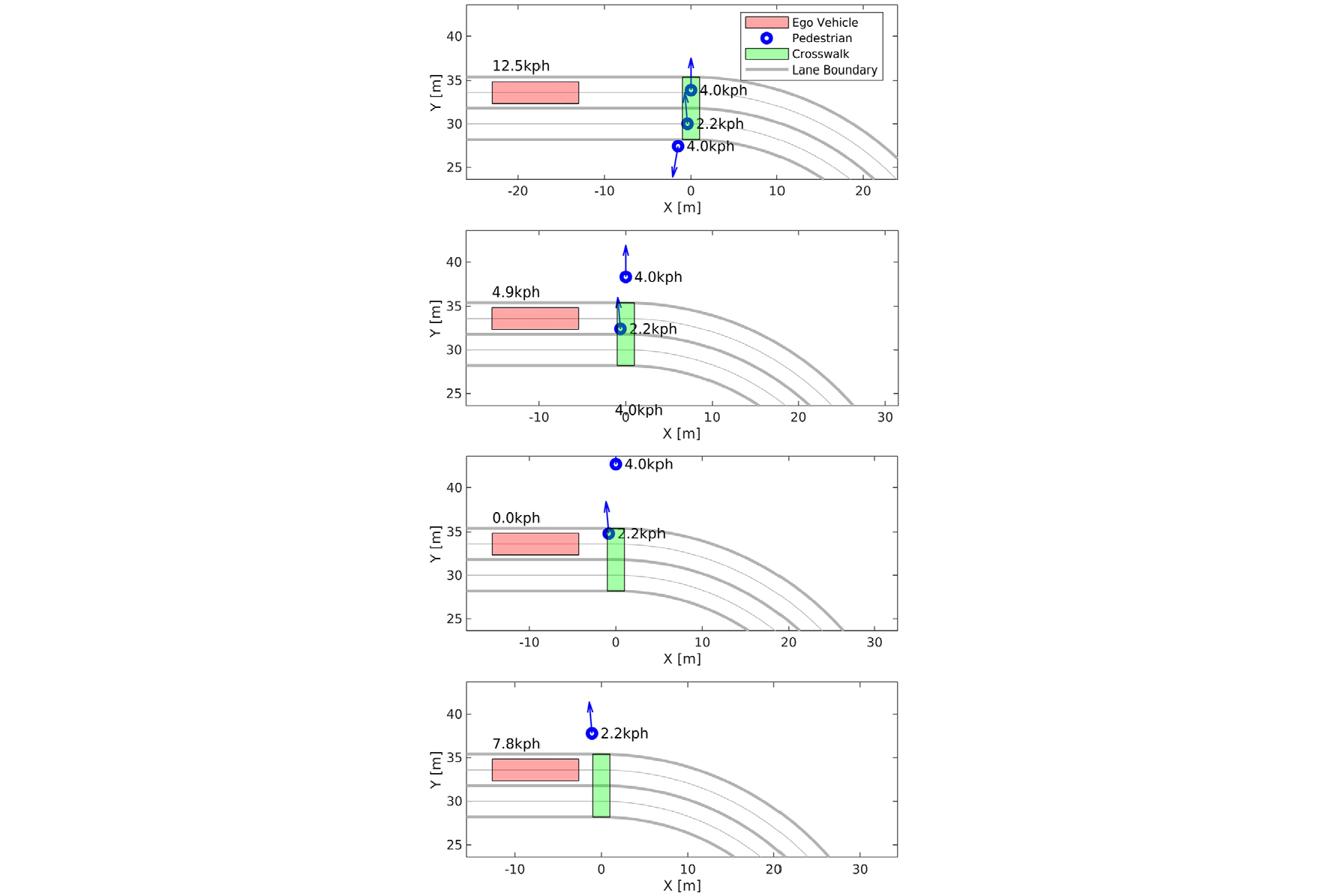
Scenario 1에 대한 시뮬레이션 결과는 Fig. 4와 Fig. 5에 나타내었다. 자율주행 차량이 비신호 횡단보도를 의식하여 정지 모드 활성화 타이머를 동작시키고 횡단보도 앞에 정지하는 감속 입력을 발생시켰다. 횡단보도 내에 횡단 보행자가 확인되어 정지 모드 활성화를 유지하여, 속력이 2.2 kph인 마지막 보행자가 횡단을 완료할 때까지 자율주행 차량이 정지 상태를 유지하였다. 보행자 횡단 완료 이후 정지 모드 활성화 타이머가 종료되어 재가속하여 횡단 보도를 통과하였다.
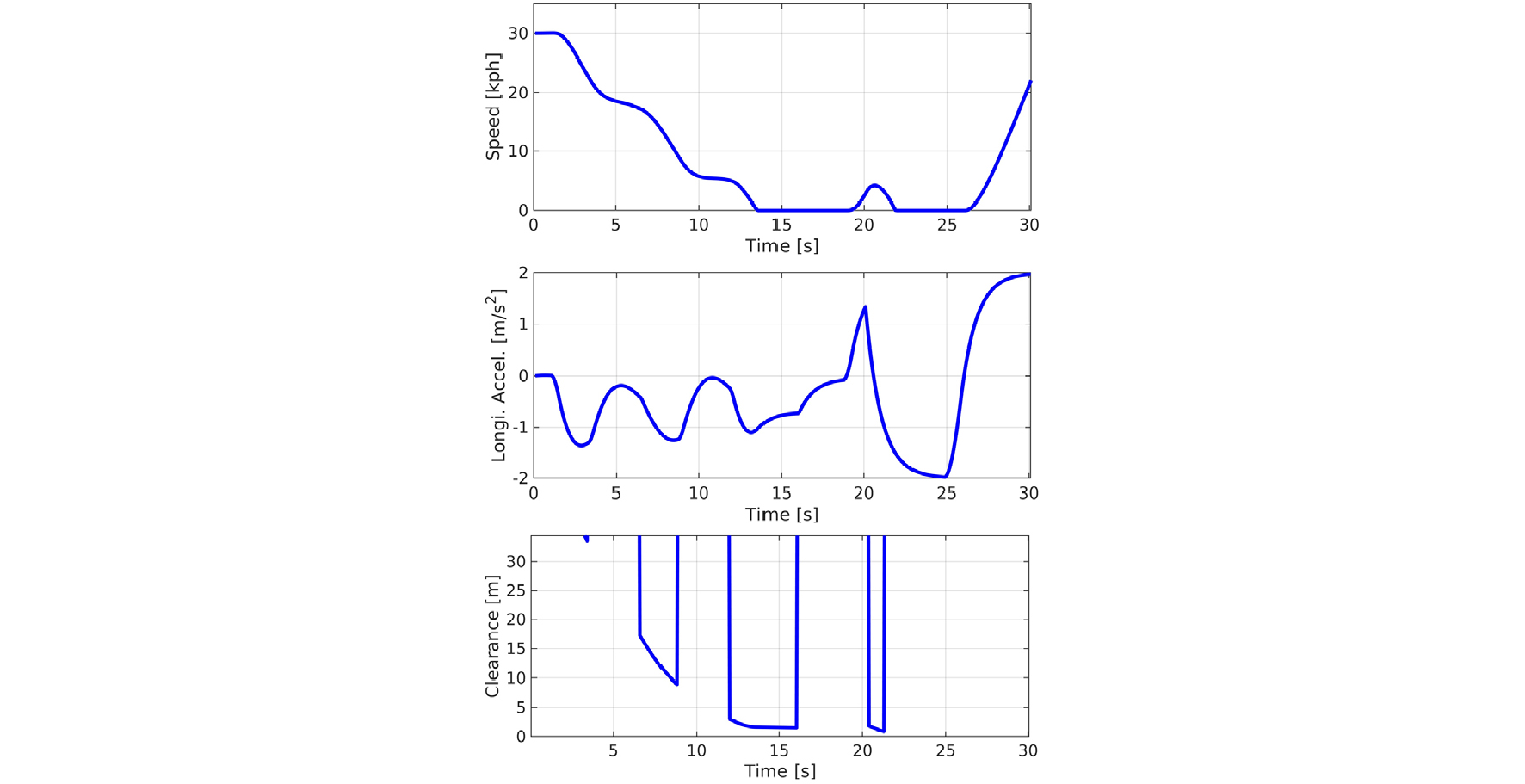
Scenario 2의 시뮬레이션 결과는 Fig. 6과 Fig. 7에 표시하였다. Scenario 1과 같이 속력이 2.2 kph인 보행자가 횡단을 완료할 때까지 정차 거동을 수행 후 재가속하였다. 그러나 t=20초에 뒤늦게 등장한 속력이 9.0 kph인 보행자를 확인하여 정지 모드 활성화 타이머를 재동작시켜 정지 거동을 재수행하였다. 해당 보행자가 횡단을 완료한 이후 자율주행 차량이 재가속하여 횡단 보도를 통과하였다. 두 시나리오에서 자율주행 차량은 비신호 횡단보도 환경에서 보행자에 대한 충분한 안전 거리를 확보하였고, 국내 비신호 횡단보도 주행에 대한 교통 법규를 준수하였다.
6. 실차 실험 결과
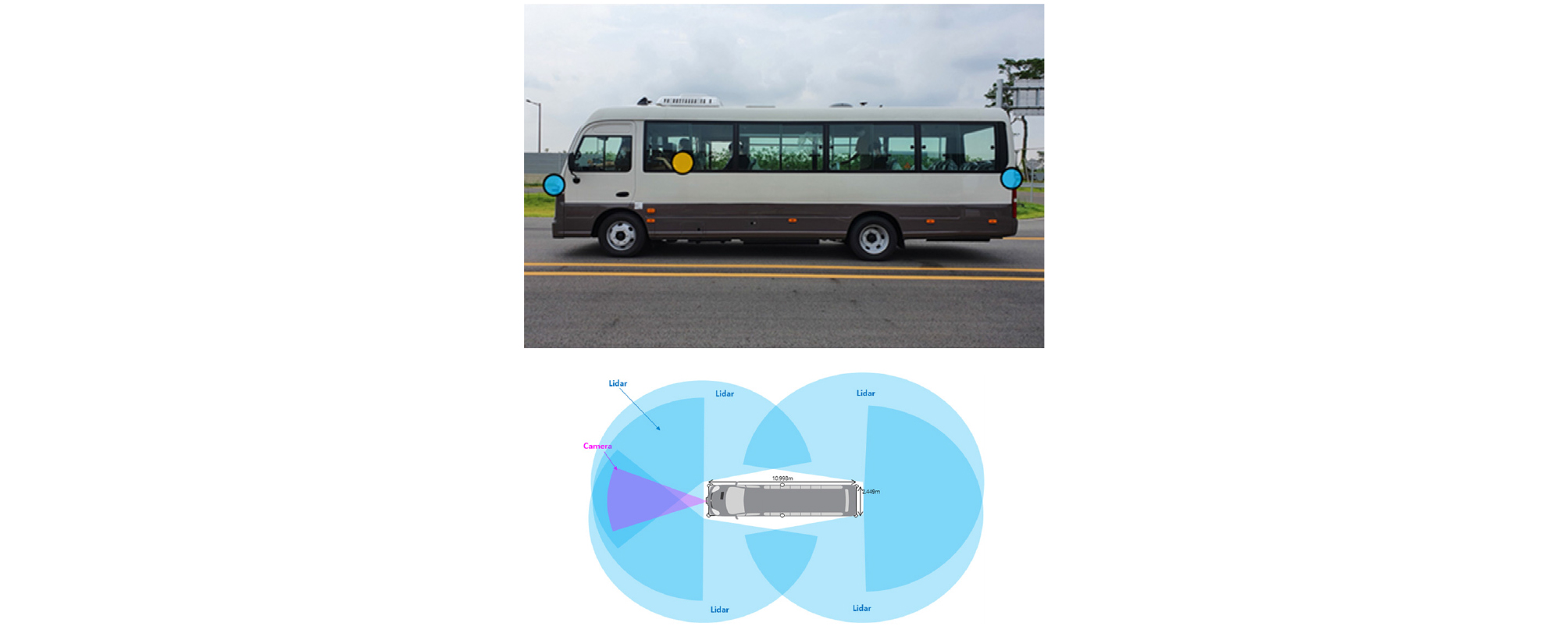
본 연구에서 제안한 거동 계획 알고리즘은 버스 차량을 개조하여 만든 실험용 자율주행 차량에 적용되었고, 실차 실험 기반으로 성능이 검증되었다. Fig. 8에 나타내어진 바와 같이, 실험 차량에는 전방위 영역을 인지할 수 있도록 카메라 센서 및 여러 대의 라이다 센서가 장착되어 있다. 카메라 센서와 라이다 센서의 정보를 융합하여 주변 차량 및 보행자 상태 정보가 도출되어 거동 계획 알고리즘에 활용되었다. 차량의 로컬 주행 경로는 고정밀 지도 및 GPS 센서 정보를 이용하여 도출되었다. 거동 계획 알고리즘을 포함한 자율주행 요소 알고리즘은 산업용 컴퓨터에 로봇 운영 체제(ROS) 기반으로 적용되었다. 주행 실험은 서울대학교 시흥캠퍼스 미래모빌리티기술센터 내 주행시험장에서 이루어졌으며, 실험 대상 횡단보도 및 정지선은 비신호 환경으로 가정하였다.
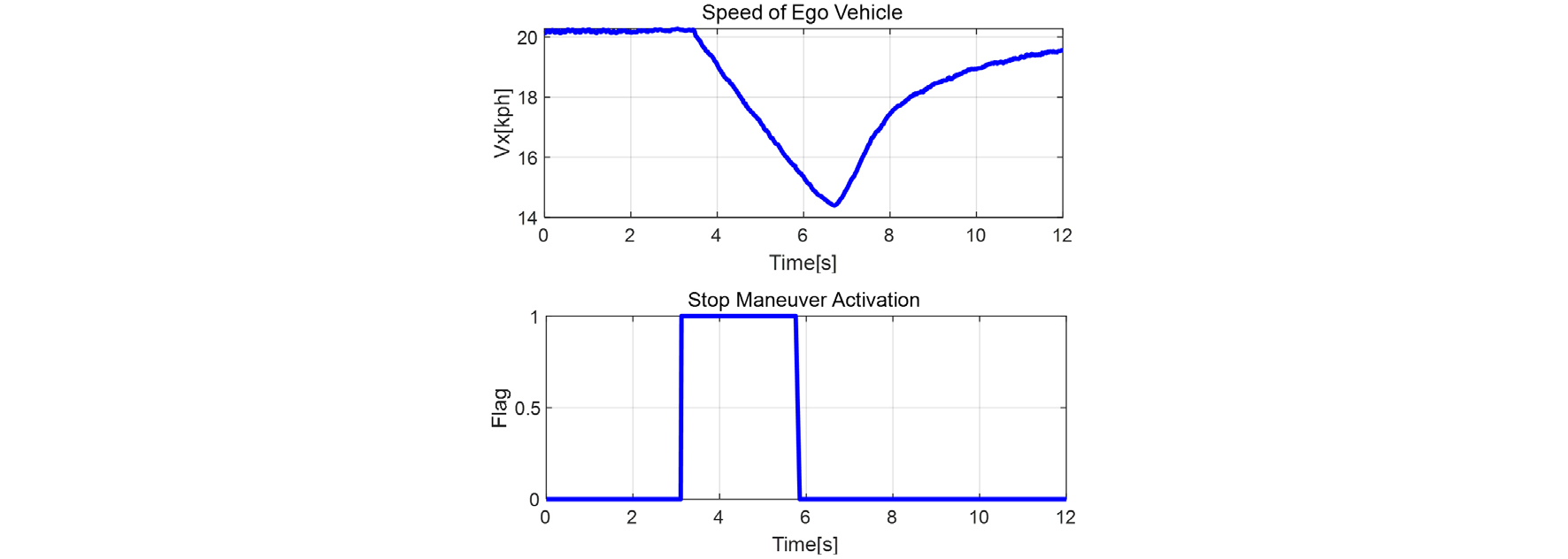
주변에 횡단 보행자가 존재하지 않는 상황에서의 횡단보도 통과 시나리오에 대한 실차 실험 결과는 Fig. 9에 나타내었다. Fig. 9에 나타내어진 바와 같이, 실험 차량이 정지선에 접근하는 t=3.2초에 정지 모드가 활성화되어 감속이 시작되었다. 정지 모드 활성화 타이머가 종료된 t=5.8초에 차량이 재가속한 후 정지선을 통과하였다. 실험 결과에 나타내어진 바와 같이, 제안된 알고리즘을 통하여 자율주행 차량의 비신호 횡단보도 대상 서행 거동이 구현되었으며, 이에 따라 국내 비신호 횡단보도 대상 교통 법규를 만족하였다.
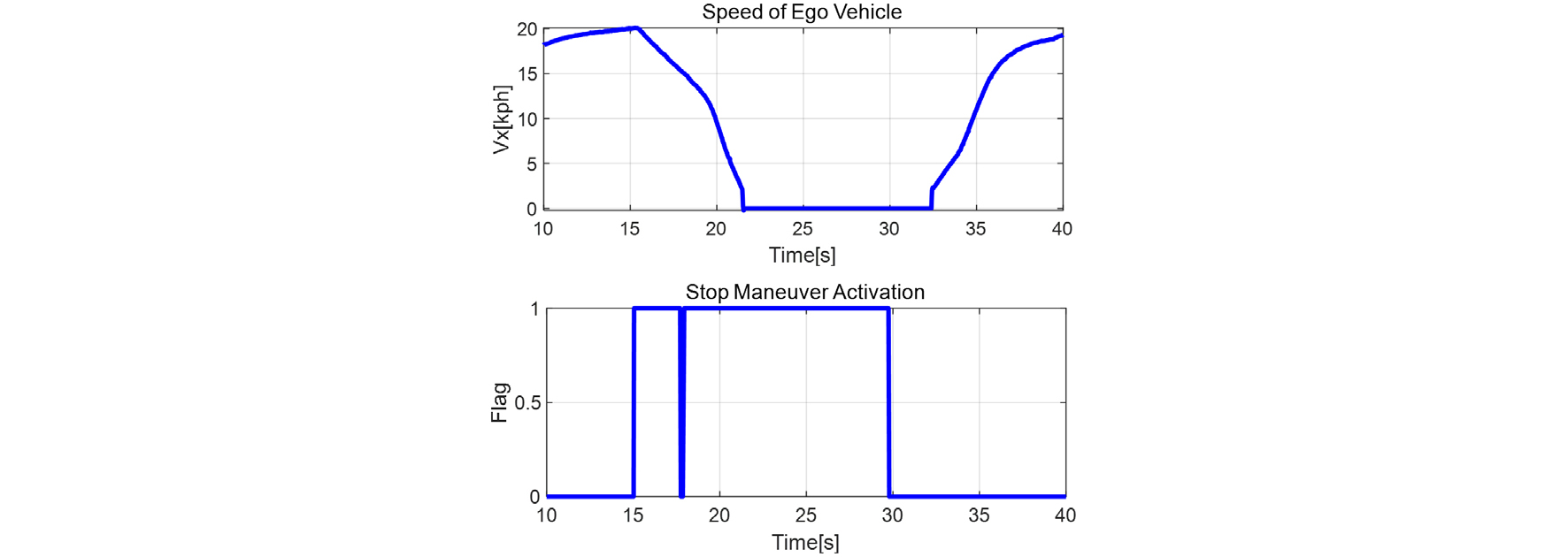
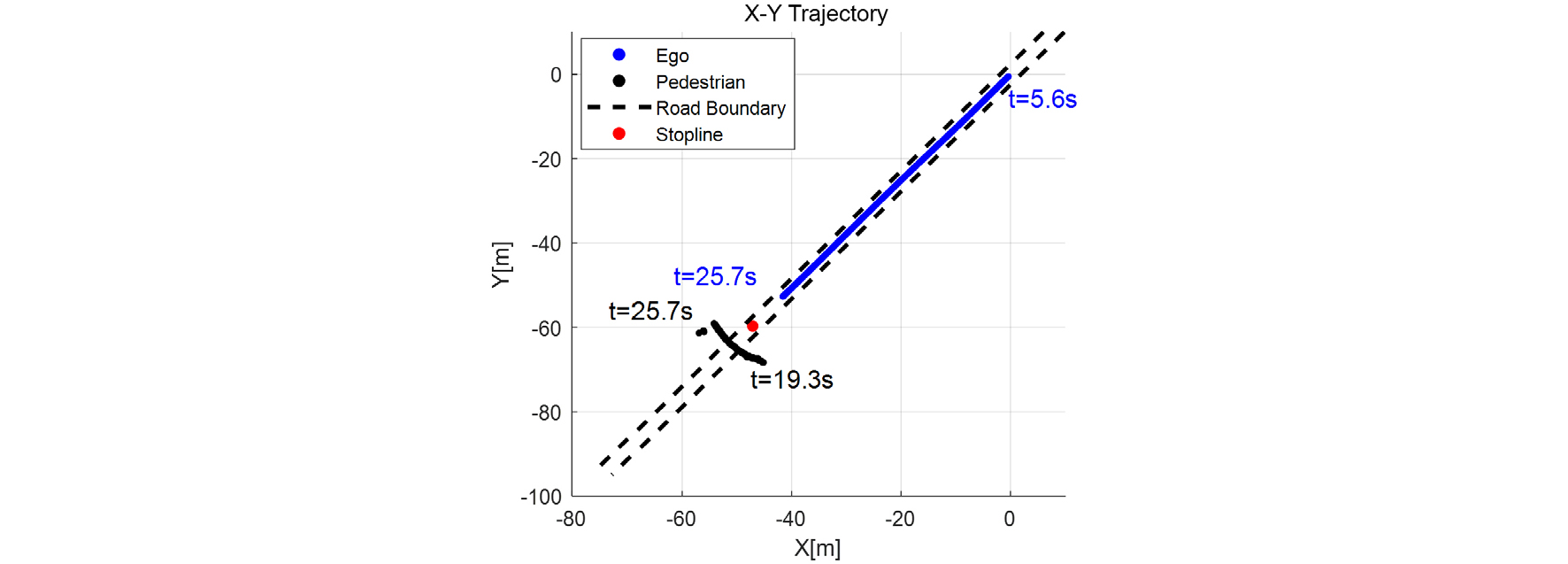
횡단 보행자가 존재하는 상황에서의 정지선 통과 시나리오 실험 결과는 Fig. 10~12에 나타내었다. Fig. 10에 나타내어진 바와 같이, 실험 차량이 정지선에 접근하는 t=15초에 정지 모드가 활성화되어 감속이 시작되었다. t=18초에 횡단 보행자가 발견됨 에 따라 정지 모드 활성화 타이머의 지속 시간이 연장되고 실험 차량은 정지하였다. 보행자 횡단 완료 후 t=30초에 정지 모드가 해제되고 실험 차량은 재가속 후 정지선을 통과하였다. Fig. 11과 Fig. 12에서 확인할 수 있듯이, t=25.7초 시점까지 횡단하는 보행자에 대응하여 실험 차량은 정지선 앞에 정지하였으며 보행자와의 충돌 안전성을 확보하였다. 따라서, 본 연구에서 제안된 알고리즘을 활용하여 비신호 횡단보도 환경에서 교통 법규를 준수하고 횡단 보행자를 보호할 수 있도록 하는 자율주행 기능이 구현되었다.

7. 결 론
본 연구에서는 비신호 횡단보도에서의 자율주행을 위한 가/감속 거동 전략을 제안하였다. 정지 모드 활성화 타이머를 활용하여 정지 혹은 통과 모드를 결정하였고, 횡단 보행자의 존재 유무를 타이머에 반영함으로써 정지 모드 연장 여부를 결정하였다. 주행 모드에 따른 가/감속 제어 알고리즘을 설계하여 정지선 대상 정지 및 통과 거동을 구현하였다. 제안된 알고리즘은 시뮬레이션 검증 및 자율주행 버스 차량 기반 실차 검증이 완료되었고, 횡단 보행자 존재 혹은 미존재 두 상황에 대하여 적절한 감속 혹은 정지선 대상 정차 거동이 구현됨으로써 국내 교통법규를 만족함이 확인되었다.
추후에는 자율주행의 작동 범위를 넓히기 위하여 횡단보도가 아닌 도로 환경에서의 무단 횡단 보행자 대상 거동 전략을 도출하는 연구를 수행할 계획이다. 이를 위해 공간-시간 corridor에 기반한 주행 모드 결정 및 거동 계획을 적용할 것이다.
