1. 서 론
2. 차량 질량 추정기
2.1. 종방향 차량 모델
2.2. 수동 변속 차량 대상 질량 추정기
3. 요 모멘트 제어 알고리즘
3.1. 목표 요 레이트 설정
3.2. 요 모멘트 제어를 위한 상위 제어기의 control law
3.3. 하위 제어기의 요 모멘트 생성 전략
4. 시뮬레이션 검증
4.1. 질량 추정기
4.2. 요 모멘트 제어
5. 결 론
1. 서 론
상용차는 일반 승용차와 다르게 최대 적차 상황에서의 질량이 공차에 비해 2~3배 이상 크다. 차량 질량이 높아질 경우 무게 중심이 높아지기 때문에 차량 전복이 발생할 확률이 높아진다. 따라서, Electronic stability control(ESC)는 브레이크 제어를 통해 차량의 속도를 줄여주고, 주행이 불안정할 때 요 모멘트를 발생시켜 횡방향 안정성을 향상시킨다.
실시간으로 상용차 질량을 추정하는 연구는 여러가지 방법으로 진행되어왔다.(1~5) 현재는 차량 동력 장치의 출력과 차량 동역학을 이용하여 질량을 추정하는 방법이 가장 잘 알려져 있다. Recursive least square(RLS)와 forgetting을 이용하여 차량 질량과 도로의 경사를 추정하는 방식이 가장 대표적이다.(4,5) 그러나 이 방식은 forgetting 조건에 따라 추정되는 질량이 크게 달라진다는 단점이 있다. 최근에는 Model predictive control(MPC)를 이용한 방식도 제안되어왔지만, 많은 개산양으로 인하여 상용화하기에 어려움이 있다. 본 연구에서는 수동 차량을 대상으로, 클러치 페달을 밟으면 순간적으로 동력이 끊긴다는 점을 이용하여 질량을 추정하는 방식의 선행 논문을 적용 및 발전시켰다.(7) 이 방식은 동력이 끊긴 순간의 가속도를 측정하고, 이를 엔전 출력 외의 도로 경사나 마찰을 반영한 가속도 값이라고 가정한다. 또한, 본 연구에서는 단순히 질량 추정에 그치지 않고, 이를 ESC에 적용하였다. 차량의 질량 파라미터에 대한 정보를 이용하면 더 정확한 시점에 제어를 개입할 수 있다.(8)
요 모멘트 제어 알고리즘은 목표 요 레이트를 추종하는 방식으로 구성된다. 목표 요 레이트는 bicycle 모델을 기반으로, 차량과 타이어의 transient 특징을 모두 반영한 목표 값을 이용하였다.(8) 목표 요 레이트는 sliding mode control을 통해 제어된다. 또한, 요 모멘트는 공압 브레이크의 ON/OFF 스위치를 통해 생성된다.
2. 차량 질량 추정기
2.1. 종방향 차량 모델
차량의 질량은 엔진의 출력 대비 차량의 가속도를 통해 추정할 수 있다. 그러나 엔진으로부터 발생되는 추진력이 모두 차량의 속도를 증가시키는데 사용되지 않는다. 일부는 도로의 마찰, 구름 저항 또는 경사면에서의 중력 등을 보상하기 위해 사용된다. 이를 식으로 표현하면 아래와 같다.
where
m : Mass of the vehicle
ax : Longitudinal acceleration
Ft : Tracton force
Fgrade : Road grade force
Frolling : Rolling resistance
Faero : Aerodynamic force
위의 식에서 Fgrade와 Frolling은 도로의 경사각와 연관이 있다. 그 식은 아래와 같다.
μr은 구름 저항 계수를, θ는 도로의 경사각을, g는 중력가속도를 의미한다. 또한, Faero은 바람이 약하게 부는 상황을 가정했을 때 차량의 속도와 상수 파라미터로 간단하게 나타낼 수 있다.
ρair는 공기의 밀도, Cd는 공기저항계수, Af는 차량의 전방 단면적 그리고 vx는 종방향 속도를 의미한다.
2.2. 수동 변속 차량 대상 질량 추정기
식 (1)~(3)을 이용하고, 모든 차량 상태를 안다고 가정하면 차량의 질량 또한 추정이 가능하다. 그러나 실제로는 도로의 경사각, 도로의 마찰계수 등의 실시간으로 변하는 외부 환경을 알 수가 없다. 따라서 본 연구에서는 수동 변속 차량을 대상으로 질량 추정기를 제안, 보완하였다.
수동차량의 경우 기어가 변속하는 순간에 운전자는 클러치 페달을 밟게 된다. 이는 엔진과 휠을 기계적으로 분리시킴으로써 동력 전달을 막는다. 동력 전달이 차단된 차량은 식 (1)의 도로의 경사각, 구름 저항 그리고 공기역학 힘에 따라 움직이게 된다. 즉 Ft가 0이 되고, 나머지 힘들이 차량의 종방향 가속도 ax를 결정한다. 이를 ashift라고 정의했을 때, 차량이 실제 가속하는 상황에서 순수하게 엔진이 영향을 주는 차량 종방향 가속도는 아래의 식 (4)와 같다.
따라서, 추정된 차량의 질량은 아래와 같이 표현된다.
2.2.1. 엔진 모터 힘 추정
엔진 모터로 인하여 발생하는 토크가 휠에 작용하는 힘은 일률 보존을 통해 계산할 수 있다. 엔진의 각속도를 나타내는 엔진 rpm과 토크를 휠에 작용하는 힘과 차량 속도로 나타내면 아래와 같다. 해당 식에서는 차량의 속도와 휠의 속도가 같음을 가정하므로 미끄러짐이 없다는 가정이 필요하다. 차량의 속도는 비구동륜의 평균으로 추정하였다.
즉, 엔진 모터의 힘은 식 (7)과 같다.
2.2.2. 관성력 추정
엔진으로 발생하는 힘이 그대로 휠에 적용되지 않는다. 엔진, 클러치, 변속기, 차동 기어로 이루어진 차량 동력 장치와 타이어의 관성력을 모두 고려해야한다.

첫번째로 차량 동력 장치의 관성에 의해 작용하는 힘은 아래와 같다.
Jdrive to wheel은 동력 장치의 관성에 의해 생기는 힘을휠에 대하여 표현한 관성이다. 이는 동력 장치만의 관성이 아니다. Jdrive으로 식 (8)을 표현하기 위해서는 식 (9)의 에너지 보존 법칙이 필요하다.
이전 연구에서는 Jdrive를 간단하게 상수로 취급한다. 그러나 실제 동력 장치의 관성은 일정하지 않다. 기어를 변경하면 기어비가 변경되기 때문에 회전 관성에 대한 보상이 필요하다. 엔진과 클러치를 J1이라고 하고, 변속기와 차동 기어의 회전 관성을 J2라고 가정했을 때 전체 관성은 식 (11)과 같다. N1/N2는 기어비를 의미한다.
동력 장치의 관성 외에도 휠의 관성에 의해 발생하는 힘도 존재한다. 휠의 관성에 의해 작용하는 힘은 식 (12)와 같다.
즉, 엔진 모터의 회전으로 발생하는 힘이 휠에 그대로 작용하는 것이 아니라, 동력 장치나 휠의 관성에 의해 일부 감소된다.
2.2.3. Recursive least square estimation
식 (4)~(12)에 따라 차량의 질량은 아래와 같이 추정된다.
추정한 질량은 recursive least square(RLS) estimation을 통해 업데이트된다. 기어가 변속하는 순간에 ashift를 측정하고, 변속된 기어로 가속할 때의 가속도와 엔진 토크로 질량을 추정한다. 본 연구에서는 추정 활성 조건을 두 가지 설정하였다. 첫번째는 기어 변속 후 1.5초 이후부터 활성화하였다. 기어를 변속한 직후에는 엔진 토크가 불안정하기 때문에 차량 질량 오차가 커진다. 두 번째는 종방향 가속도가 0.3g보다 클 경우에 업데이트하였다. 종방향 가속도가 작으면 식 (13)에서 분모가 0에 가깝게 되고 분자의 엔진 토크도 작아지기 때문에 이 역시 오차가 커진다.
3. 요 모멘트 제어 알고리즘
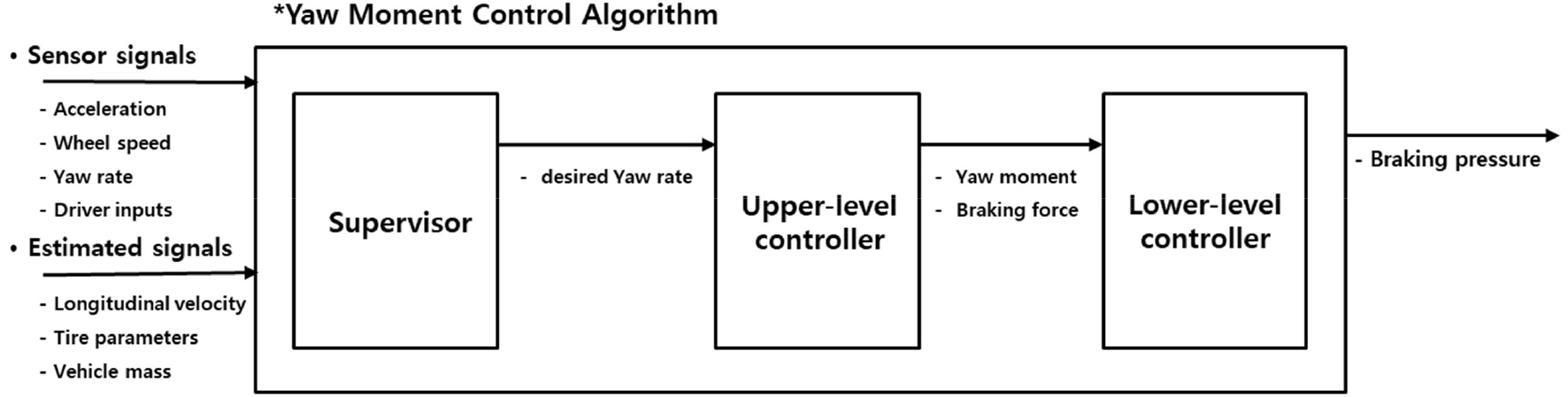
요 모멘트 제어 알고리즘은 Fig. 2와 같이 supervisor, upper-level controller, lower-level controller로 이루어져 있다. 첫번째로 Supvervisor에서는 목표 요 레이트를 설정한다. 속도와 횡가속도가 크지 않는 그립 주행 상황에서의 요 레이트를 통해, 목표 요 레이트를 설정한다. 해당 과정에서는 bicycle model 가정이 필요하다. 두번째 upper-level controller에서는 추정 요 레이트를 추종하기 위한 요 모멘트를 추정한다. 파라미터의 변화가 큰 상용차를 대상으로하는 제어이기 때문에, 본 연구에서는 sliding mode control을 통해 강건하게 제어하였다. 마지막 lower-level controller에서는 추정한 요 모멘트를 공압 브레이크 ON/OFF 제어를 통해 구현한다. 따라서, 브레이크 챔버의 압력을 높이는 building, 유지하는 holding, 감소시키는 exhausting이 제어 입력이 된다.
3.1. 목표 요 레이트 설정
기존 대부분의 연구에서는 목표 값은 요 레이트의 변화를 0으로 가정한steady-state bicycle model을 이용하였다. 즉, steady-state 요 레이트 게인 값에 전륜 조향각을 곱하여 아래와 같이 목표 요 레이트를 설정하였다. 식 (14)에서 L은 전륜과 후륜 사이의 거리를, Kus는 understeer gradient를 의미한다.
그러나, 실제 요 레이트 반응과 조향각에는 phase차이가 존재한다. 이를 해결하기 위해서 단순하게 1차 또는 2차 딜레이 전달 함수를 이용한다.
최근 연구 중에서 요 레이트 변화(yaw acceleration)을 고려하여 차량의 transient cornering 특징을 반영하고, 타이어 relaxation length tire(RLT) model을 이용하여 타이어의 transient 특징을 반영하는 방법이 있다.(9) 이를 수식으로 나타내면 아래와 같다.
식 (15)에서 τ는 타이어의 relaxation length과 종방향 속도의 비율을 의미한다.
3.2. 요 모멘트 제어를 위한 상위 제어기의 control law
목표 요 레이트를 추종하기 위해 sliding mode control을 통해 요 모멘트를 생성하였다. 먼저 sliding surface는 식 (16)과 같다.
Surface를 0으로 수렴시키기 위해 리아프노프 함수는 식 (17)과 같이 정의하였다.
먼저 equivalent control은 (x)=0을 통해 식 (18)과 같이 유도할 수 있다.
Corrective control은 reachability condition을 통해 유도된다. Reachability condition은 유한한 시간내에 제어 입력을 통하여 sliding surface를 보낼 수 있는 충분 조건을 의미한다. 이를 정리한 것이 식 (19)이다.
즉, control law는 아래와 같다.
타이어에 작용하는 횡방향 힘은 bicycle model을 통해 계산할 수 있다. 횡방향 동역학 식과 모멘트에 관한 식을 연립하면 아래의 식과 같이 나타난다.
횡가속도와 요 레이트 변화량은 센서의 노이즈가 존재하므로, 본 연구에서는 recursive least square를 통해 횡방향 힘을 추정하였다. 또한, chattering 현상을 제거하기 위해 saturation 함수를 이용하였다.
3.3. 하위 제어기의 요 모멘트 생성 전략
요 모멘트를 구현하기 위해서 단순 브레이크 압력 분배를 이용하였다. Mz가 0보다 클 때는, 오른쪽 방향의 브레이크 압력을 0으로 설정하고 왼쪽 브레이크 압력을 높였다. 또한 Mz가 0보다 작으면 이와 반대로 브레이크 압력을 생성하였다. 이를 식으로 나타내면 아래와 같다.
실제 공압 브레이크 엑츄에이터는 밸브의 ON/OFF를 통해 스위치 제어된다. 현재 압력이 목표 압력보다 낮으면 building을 통해 압력을 높여주고, 목표 압력보다 높으면 exhausting을 통해 압력을 낮춰준다. 또한 잦은 제어 입력을 방지하기 위해 오차가 특정 값보다 작아지면 압력을 유지하는 holding으로 제어한다.
4. 시뮬레이션 검증
질량 추정와 요 모멘트 제어 성능은 Trucksim과 MATLAB/Simulink를 통해 검증하였다. 시뮬레이션에 사용된 차량의 파라미터는 Table 1과 같다. 해당 파라미터는 적차 상황의 정보이다.
Table 1.
Simulation Vehicle Parameter
| Para meter | value | Para meter | Value |
| m | 4000 [kg] | Iz | 34372.9 [kg·m2] |
| lf | 1.113 [m] | lr | 4.887 [m] |
| Cf | 189 [kN/rad] | Cr | 87 [kN/rad] |
4.1. 질량 추정기
수동 차량 대상 질량 추정기는 기어를 변경하는 동안 ashift를 측정하고, 기어 변경 이후에 가속 상황의 엔진 토크, 기어비, 종방향 가속도를 통해 차량 질량을 추정한다. 이를 검증하기 위해 1단에서부터 6단까지 가속하는 상황을 설정하고 실험해보았다. 4초동안 가속하고, 0.5초동안 기어를 변경하는 시나리오로 실험을 진행했다. 또한 6000kg의 짐을 실어서 차량의 총질량은 10000kg이다. 시뮬레이션 결과는 Fig. 3과 같다.
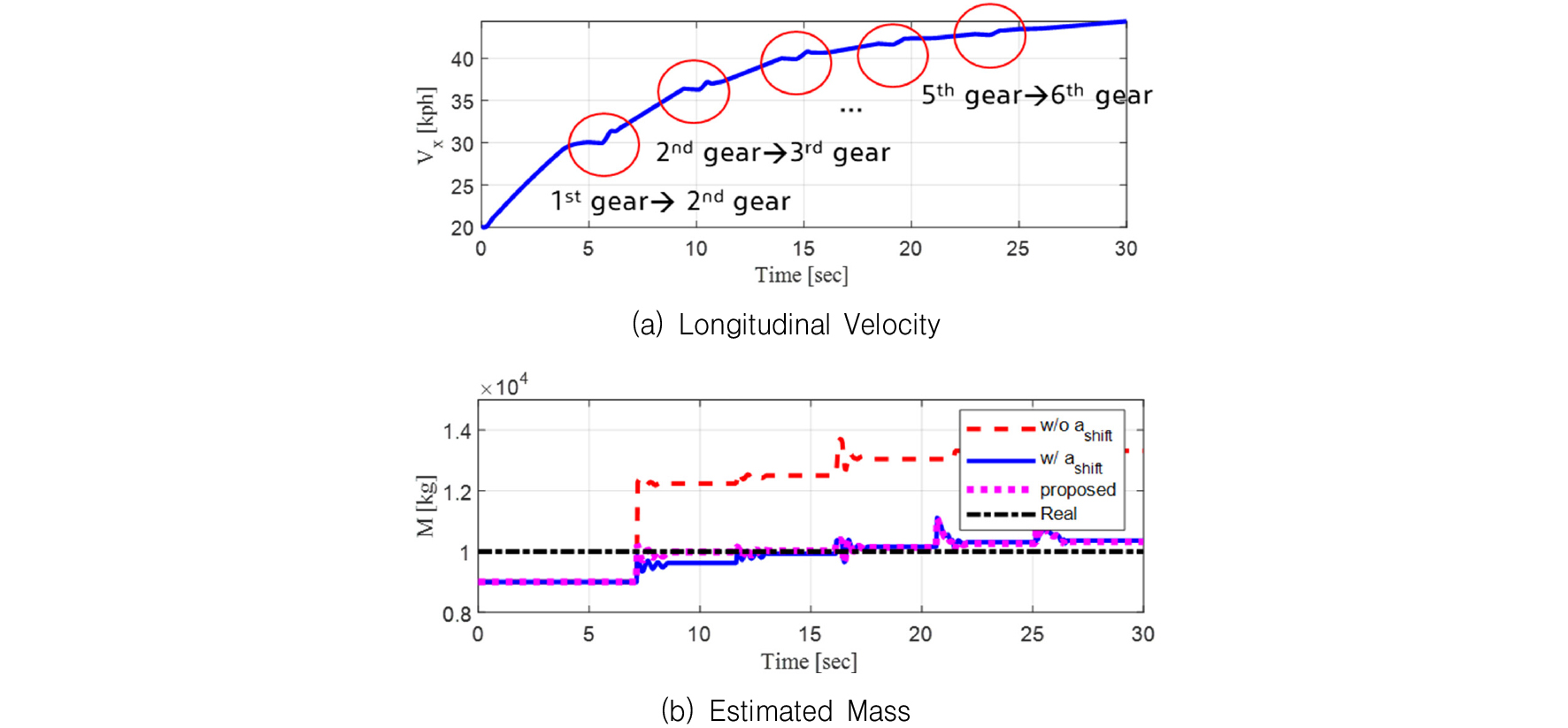
ashift를 고려하지 않은 경우에는, 추정 질량이 실제 질량보다 훨씬 크게 나타남을 알 수 있다. 이는 실제 엔진 출력이 전부 차량의 종방향 가속에 이용되지 않고 일부 마찰로 빠져나감을 의미한다. 또한 제안된 방법은 실제 동력 장치의 관성을 일정한 상수로 하지 않고, 식 (11)을 고려하여 기어에 따라 달라지게 설정한 값이다. 그 결과 3단 이상에서는 큰 차이가 없지만 1단에서 오차가 줄었다. 이는 1단의 경우 기어비가 크기 때문에, 관성에 대한 오차 또한 커지기 때문이다.
4.2. 요 모멘트 제어
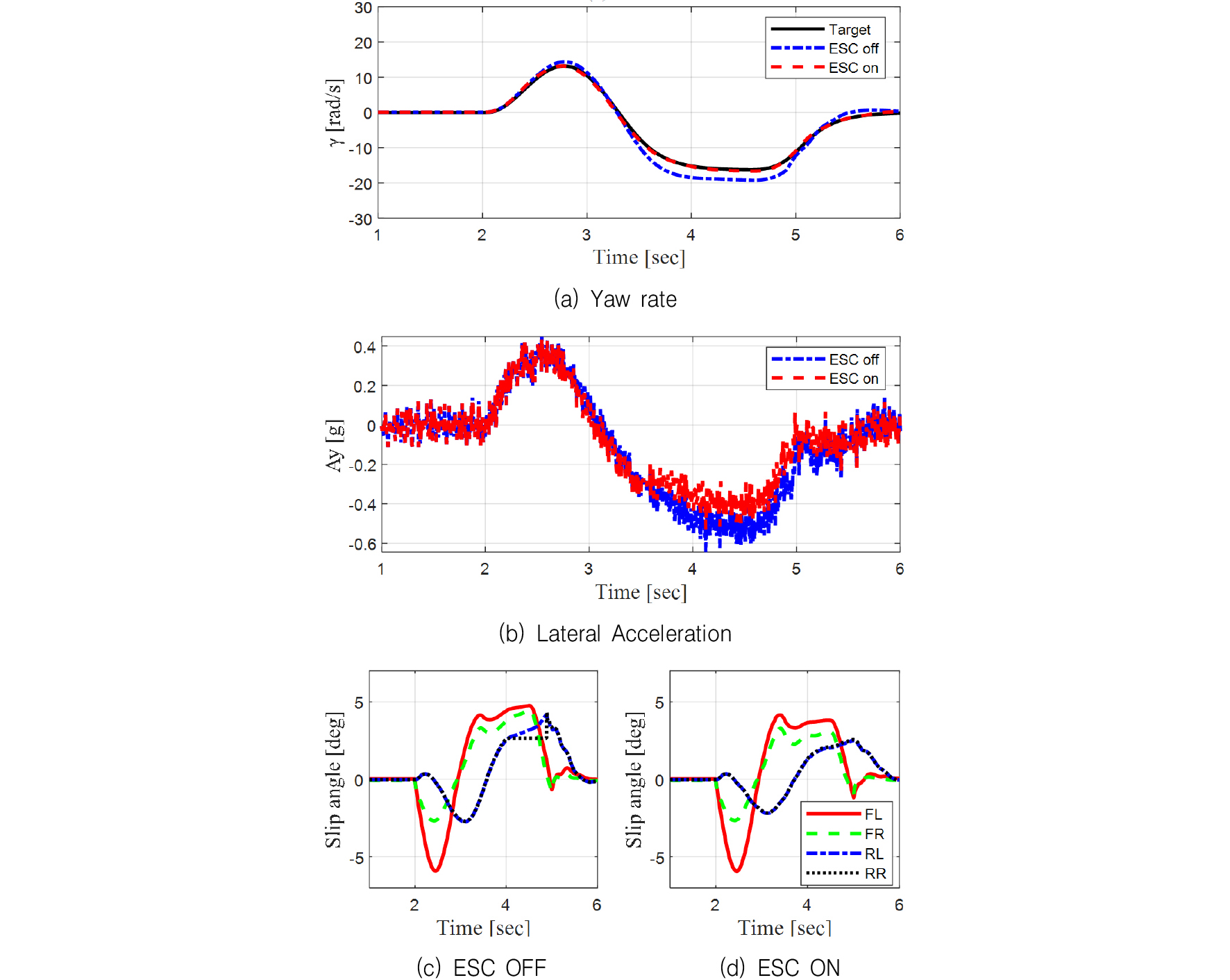
차량의 횡방향 안정성을 검증하기 위해 sine with dwell test를 시뮬레이션을 통해 구현하였다. 0.5Hz의 주파수를 갖고, dwell 시간은 상용차 조건에 맞춰 1초로 설정하였다. 또한 조향각은 220 deg로 충분히 크게 설정하였다. 공차 상황의 실험 결과는 Fig. 4와 같다.
4.2.1. 적차 상황 시뮬레이션 결과
ESC가 작동한 경우, Fig. 4(b)에서 볼 수 있듯이 횡가속도가 최대 0.6g에서 0.4g로 감소하였다. 상용차는 횡가속도가 0.6g만 되도 롤오버의 위험이 있다. Fig. 4(c)에서 RR 방향의 휠 slip angle이 4초부터 1초간 떴기 때문에 일정하게 유지되고 있다. 반면에 ESC가 작동한 경우에는 바퀴가 뜨지 않고 slip angle값도 3degree를 넘지 않았다. 이외의 다른 휠에서도 ESC 작동으로 인해 slip angle이 감소하는 효과가 나타났다.
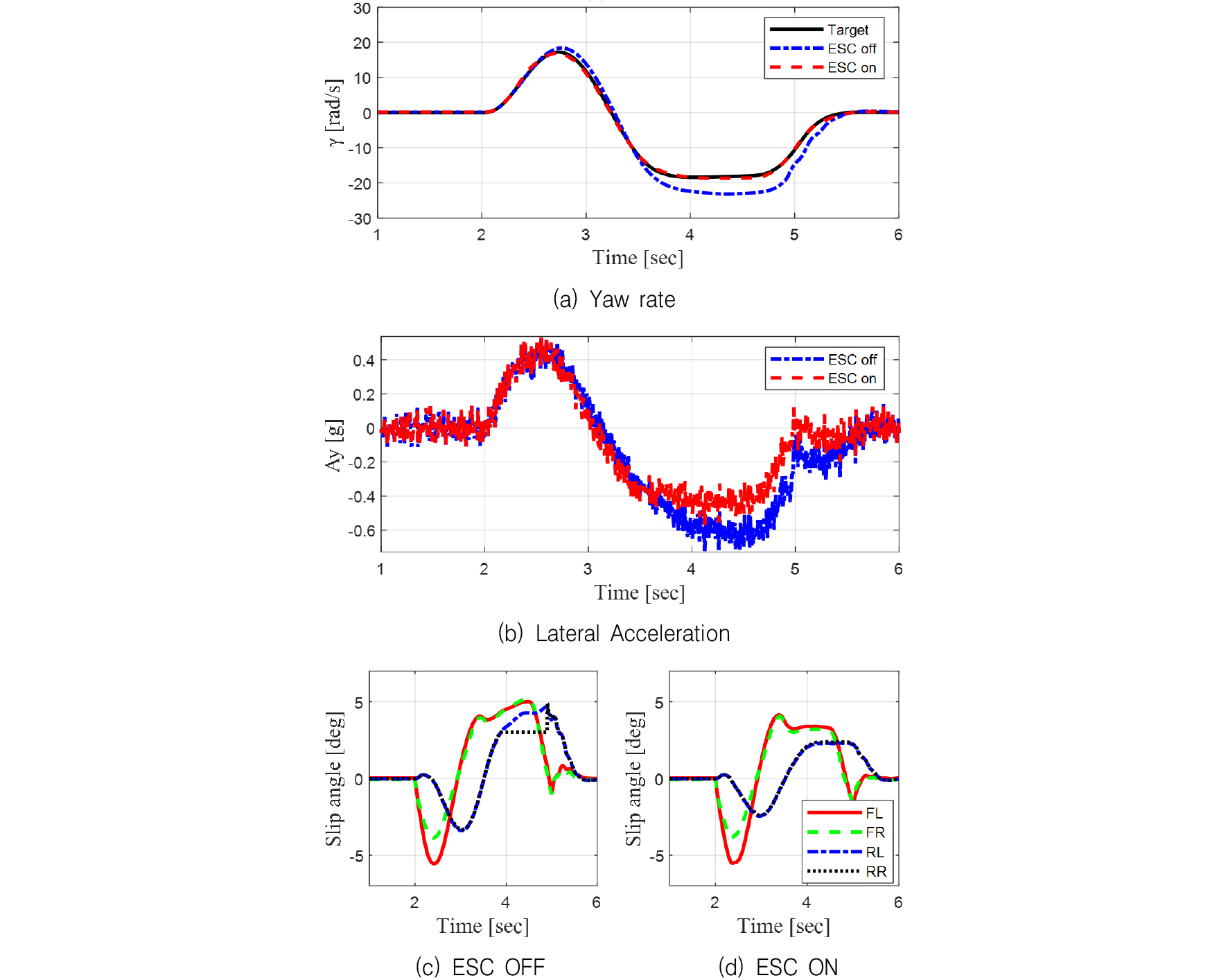
적차 상황에서의 시뮬레이션 결과는 공차와 대부분 유사하다. 차량의 질량은 4000kg에서 7000kg으로 증가시켰다. 질량 파라미터가 변화하였기 때문에 목표 요 레이트가 Fig. 4(a)와 다름을 알 수 있다. 적차의 무게중심은 공차에 비해 높기 때문에 더 낮은 횡가속도에도 롤오버가 일어날 수 있다. 따라서, Fig. 5(b)의 횡가속도가 Fig. 4(b)에 비해 0.05g가량 낮음을 확인할 수 있다. Fig. 5(c)와 (d)에서는, Fig. 4와 유사하게 전체적인 slip angle이 감소하였고 한 바퀴가 들리는 현상도 사라졌다.