

1. 서 론
2. 타이어 모델 기반 타이어 특성 모사
2.1. 파제카(Pacejka)의 마법 공식(Magic formula)
2.2. 파제카의 마법 공식을 이용한 최소제곱 문제 정의
3. 인공 신경망을 이용한 타이어 특성 모사
3.1. 인공 신경망 구조 및 데이터 할당
3.2. 인공신경망을 이용한 최소제곱 문제 정의
4. 추정 결과 및 비교
4.1. 타이어 횡슬립각만 존재하는 경우에 대한 타이어 힘 추정 결과
4.2. 타이어 슬립률만 존재하는 경우에 대한 타이어 힘 추정 결과
4.3. 결합 슬립(Combined slip) 상태에서의 타이어 힘 추정 결과
5. 결 론
1. 서 론
그 동안 타이어 힘을 추정하기 위한 많은 연구가 시행되어왔으나, 타이어 비선형 영역에서 타이어 힘을 묘사하는 것은 매우 어려운 일이었다. 특히, 타이어 모델을 통하여, 타이어의 종방향 슬립률과 횡방향 슬립앵글이 동시에 발생하게 되는 결합 슬립(combined slip) 상황에서 타이어 힘을 정확하게 묘사하는 것에는 한계가 있다. 왜냐하면 combined slip 상황에서의 타이어 반응은 수학적으로 정확하게 표현되기 어려운 비선형성을 가지고 있기 때문이다.(1)
위 논문에서는, 타이어의 비선형적 반응을 묘사하기 위해 인공 신경망(Artificial neural network)을 이용하여 실시간으로 계산될 수 있는 모델을 구현하였다. 또한, 전통적인 타이어 모델 중 하나인, 파제카(Pacejka)의 마법 공식(Magic formula) 모델의 파라미터 최적화를 통하여 인공 신경망 모델과 비교하였다. 마지막으로, 각 방법론이 가지고 있는 장점과 단점에 대해 비교 서술하였다.
2. 타이어 모델 기반 타이어 특성 모사
본 장에서는 타이어 힘을 표현하기 위해 파제카의 마법 공식 모델(Pacejka’s Magic Formula model)을 이용하여 파라미터 최적화 문제를 정의하였다. 타이어 모델 계수들은 타이어 힘 계측 결과와의 오차를 최소화하기 위한 최적화를 통해 결정되었다. 타이어 모델 파라미터는 비선형 최소제곱 문제(Nonlinear least square problem)를 푼 결과로 결정되었고, 타이어 계측 데이터는 MTS Flat track test를 통해 얻은 데이터이다.
2.1. 파제카(Pacejka)의 마법 공식(Magic formula)
계측된 타이어 힘을 모델로 모사하기 위해서 실험적인 마법 공식(empirical Magic Formula)이 이용되었다.(2) 파제카의 마법 공식에서 타이어의 힘은 아래와 같이 모델링 될 수 있다.
where
and
위의 공식에서 Combined slip을 고려한 수정(Correction) 공식은 아래와 같다.
where
각 파라미터의 자세한 의미는 Pacejka의 논문에서 확인할 수 있다.(2)(1a)~(2d) 사이의 공식에서 볼 수 있듯이, 총 36개의 고정된 파라미터 세트(Constant parameter set)을 이용하여 타이어 힘을 모델링할 수 있다. 이렇게 정해진 모델을 이용하여 다음 장과 같이 최적화 문제를 정의하였다.
2.2. 파제카의 마법 공식을 이용한 최소제곱 문제 정의
계측된 타이어 힘을 모델로 모사하기 위해서 empirical Magic Formula을 이용하여 최적화 문제(Optimization problem)을 정의하였다. 이를 위한 비선형 최소제곱 문제는 아래와 같이 정의될 수 있다.(3)
위의 공식에서 X는 최적화 변수, Xlat는 횡방향 힘과 관련된 변수, Xlon는 종방향 힘과 관련된 변수, Xcomb는 Combined slip correction과 관련된 변수이다. 또한, Xub와 Xlb는 각각 parameter set의 upper-bound와 lower-bound를 의미한다. 위와 같은 최적화 문제의 해를 찾음으로써 주어진 타이어 데이터에 맞는 모델을 생성할 수 있다. 본 연구에서는 Levenberg-Marquardt 알고리즘을 이용하여 해를 구하였다.
3. 인공 신경망을 이용한 타이어 특성 모사
본 장에서는 타이어 특성을 모사하기 위해 인공 신경망을 이용하여 계측 데이터에 맞도록 회귀(regression) 되었다.(4) 인공 신경망을 학습하기 위해 Levenberg-Marquardt알고리즘을 이용하여 역전파(backpropagation) 되었다.
3.1. 인공 신경망 구조 및 데이터 할당
제안된 인공 신경망의 구조은 Fig. 1과 같고, shallow hidden layer을 이용하였다. 타이어의 종방향 힘 Fx과 횡방향 힘 Fy을 추정하기 위해, 네 가지 입력이 이용되었다. 네 가지 입력은 타이어 수직방향 힘 Fz, 슬립각 α, 슬립률 λ, 캠버각 camber이다.
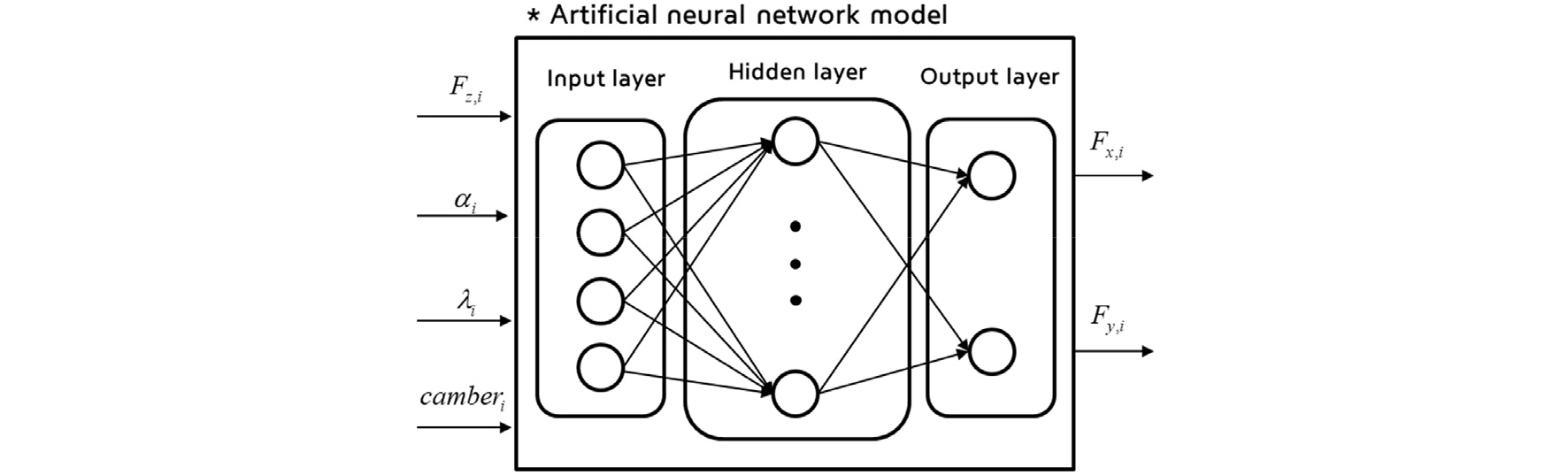
주어진 데이터는 training set, validation set, test set으로 나뉘었다. Training set은 파라미터 조정을 위해, validation set은 hyperparameter 조정을 위해, test set은 학습된 모델을 시험하기 위해 사용되었다. 각각 데이터의 70%, 15%, 15%만큼 할당하였다. 데이터 할당은 무작위 추출법(random sampling)을 이용하였다.
3.2. 인공신경망을 이용한 최소제곱 문제 정의
계측된 타이어 데이터를 모사하기 위해서 인공 신경망을 이용하여 비용 함수(Cost function)을 최소화할 수 있다. 역전파(Backpropagation)을 통해 최소화하고자 하는 Cost function은 아래와 같다.
위 식에서 Fy,ANN과 Fx,ANN는 각각 인공 신경망을 통해 구해진 타이어 횡방향 힘과 종방향 힘이다. X는 인공 신경망에서 결정되어야 하는 weight와 bias를 의미한다. 비용함수 J는 평균제곱오차(Mean squared error, MSE)를 의미한다.
본 연구에서는 위의 비용 함수를 최소화시키기 위해 Hidden layer의 neuron 수는 12개로 설정되었고, 학습율(Learning rate)와 모멘텀 상수(Momentum constant)는 각각 0.01, 0.9로 설정되었다.
4. 추정 결과 및 비교
본 장에서는 2장과 3장에서 소개된 두 개의 접근법을 이용하여 타이어 힘을 추정한 결과에 대해 논의된다. 타이어 힘을 추정 결과는 총 세 가지 경우에 대한 결과 및 그래프가 제시되었다. 첫번째는 타이어의 슬립률(slip ratio)가 없이 슬립각만 존재하는 경우(Pure sideslip)이다. 두번째는 타이어의 슬립각(sideslip angle)없이 슬립률만 존재하는 경우(Pure longitudinal slip)이다. 세번째는 타이어의 슬립률과 슬립각이 동시에 존재하는 경우(Combined slip)이다.
타이어 계측 데이터는MTS Flat track 장비를 이용하여 실내 실험 리그(Indoor test rig)를 기반으로 얻어졌다. 각 계측 데이터는 타이어에 대한 수직하중 조건을 세 가지로 결정한 상태에서 슬립률이나 슬립각을 변화시키면서 타이어 힘을 계측하는 방식으로 시행되었다.
4.1. 타이어 횡슬립각만 존재하는 경우에 대한 타이어 힘 추정 결과
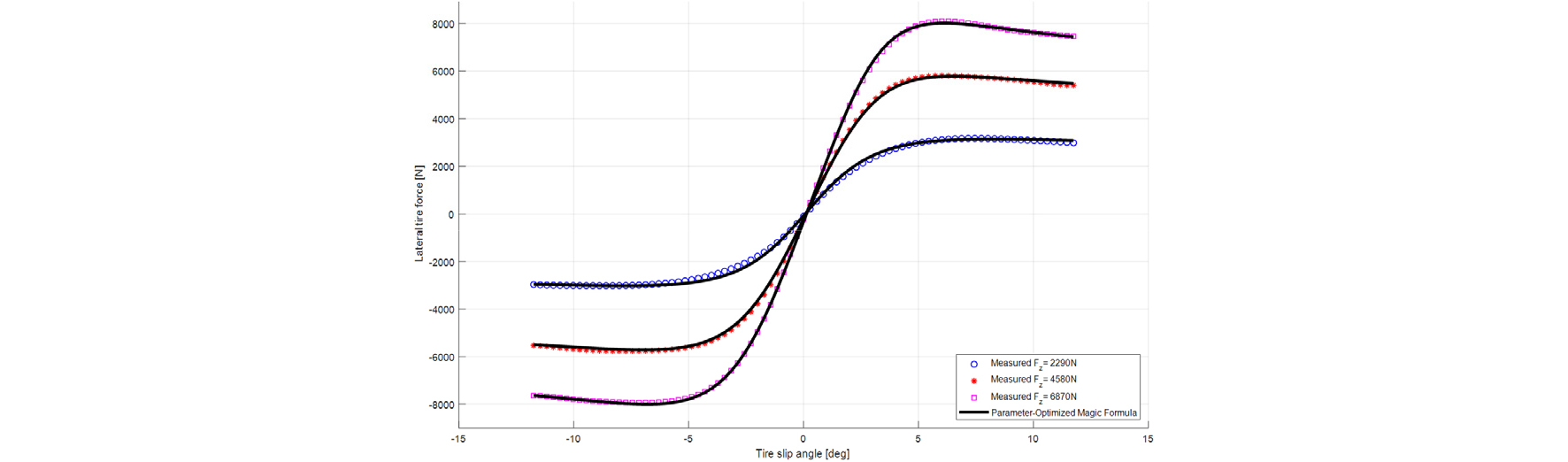
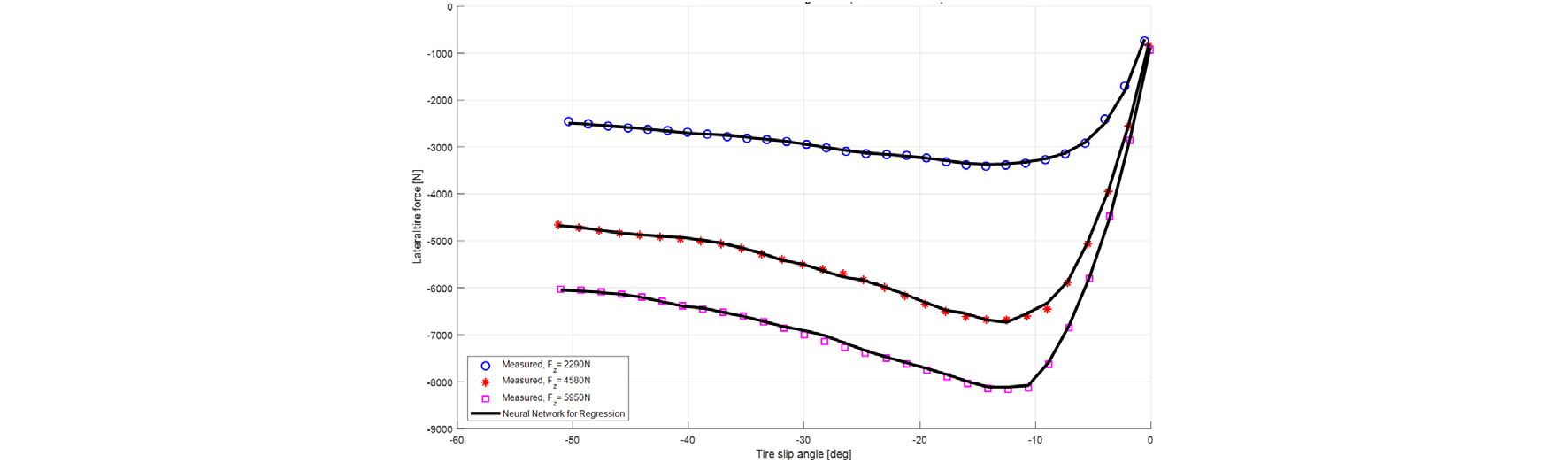
위에서도 언급되었듯이, 첫번쨰 경우는 타이어의 횡슬립각만 존재하는 경우이다. 이 경우에는 타이어의 수직하중을 2290N, 4580N, 5950N으로 인가한 상태에서 타이어의 슬립각을 변화시키면서 횡방향 타이어 힘의 변화를 비교하였다.
Pacejka의 Magic Formula의 파라미터 최적화를 통해 얻어진 결과는 Fig. 2와 같다. Fig. 2에서 볼 수 있듯이, 세 가지 하중 조건에 대해서 타이어 슬립각을 변화 시켰을 때의 타이어 횡방향 힘을 잘 모사할 수 있다는 것을 확인할 수 있다.
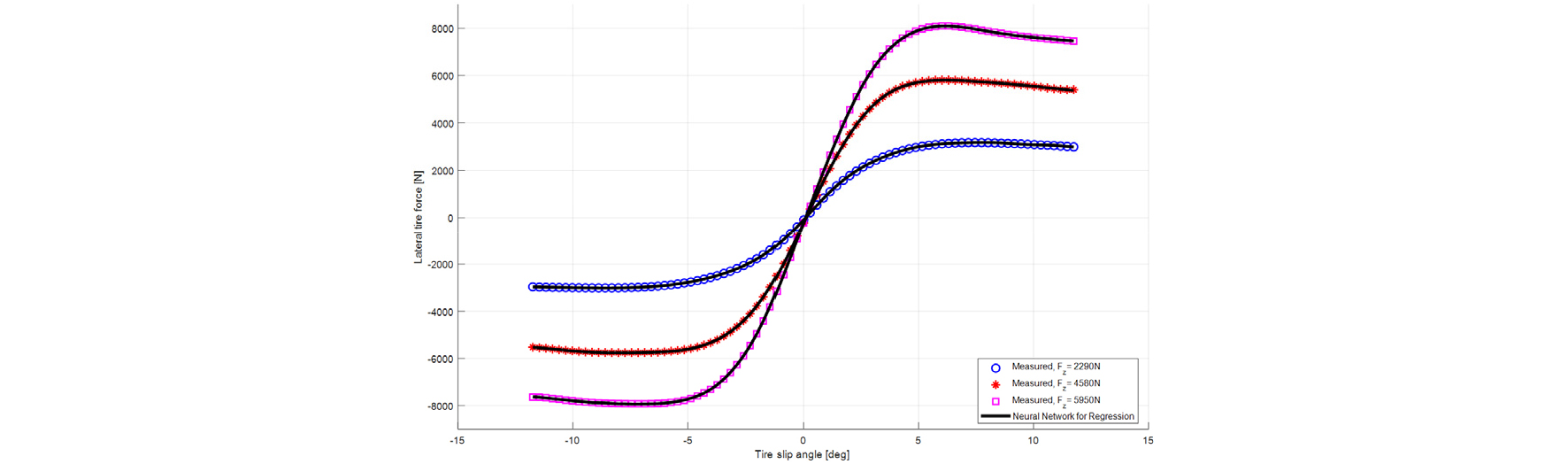
인공 신경망을 이용하여 얻어진 결과는 Fig. 3와 같다. Fig. 3에서 볼 수 있듯이, 인공 신경망을 이용한 경우에도 파제카 모델을 이용한 경우와 마찬가지로, 세 가지 하중 조건에 대해 타이어 횡방향 힘을 문제없이 추정할 수 있다. 즉, Pure sideslip인 경우에는, Pacejka 모델과 Neural network 모두 성공적으로 타이어 힘을 모사할 수 있고, 두 가지 방법 사이에 큰 성능차이는 없다.
4.2. 타이어 슬립률만 존재하는 경우에 대한 타이어 힘 추정 결과
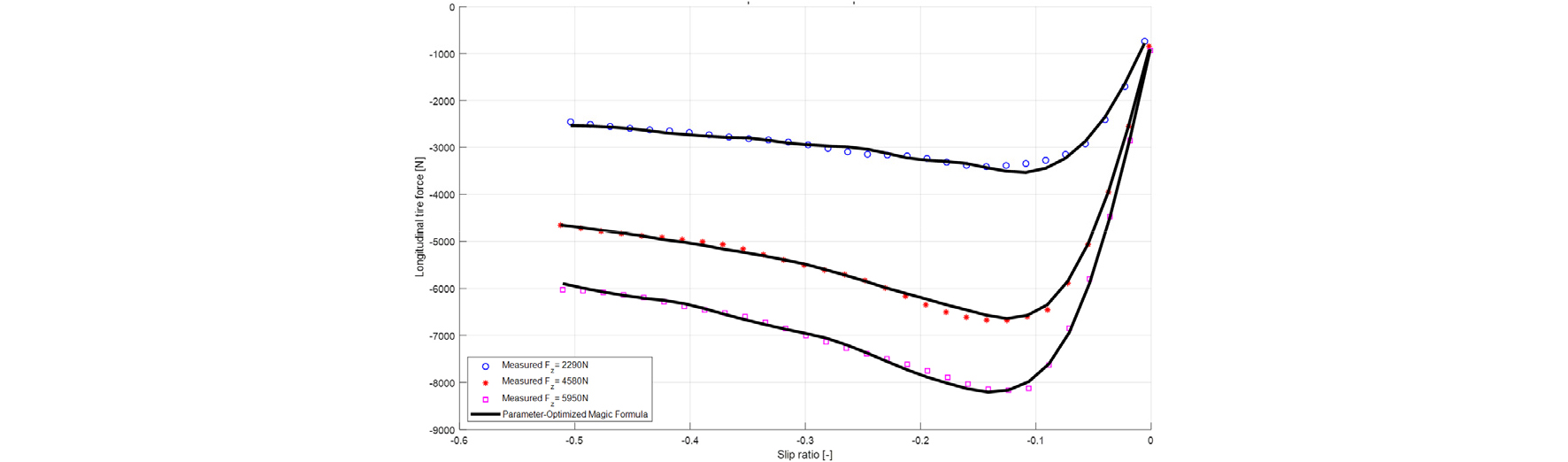
두번째 경우는 타이어의 종방향 슬립률만 존재하는 경우이다. 이 경우에도 마찬가지로 타이어 수직하중을 2290N, 4580N, 5950N으로 인가한 상태에서 타이어의 슬립률을 변화시키면서 종방향 타이어 힘의 변화를 비교하였다.
Pure longitudinal slip의 경우에서의 Pacejka의 Magic Formula의 파라미터 최적화를 통해 얻어진 결과는 Fig. 4와 같다. Fig. 4에서 볼 수 있듯이, 세 가지 하중 조건에 대하여 타이어 슬립률을 변화시켰을 때의 타이어 종방향 힘을 잘 모사할 수 있다.
이와 동시에, 인공 신경망을 이용하여 얻어진 결과는 Fig. 5와 같다. 인공 신경망을 이용한 경우에도 파제카 모델과 마찬가지로, 세 가지 하중 조건에 대해 타이어 종방향 힘을 잘 추정할 수 있다. 요약하자면, Pure sideslip angle이나 Pure longitudinal slip인 경우에는, Pacejka 모델과 인공 신경망 모델 모두 타이어 힘을 잘 모사할 수 있으며, 인공 신경망을 활용한 접근법의 장점이 보이지 않는다. 하지만, combined slip 상황에서의 복잡한 타이어 특성을 구현하는 데에는 Pacejka model만으로는 한계가 있다. 다음 장에서는, combined slip 에서의 타이어 반응을 통해 살펴봄으로써 두 방법론 간의 장단점을 확인할 수 있다.
4.3. 결합 슬립(Combined slip) 상태에서의 타이어 힘 추정 결과
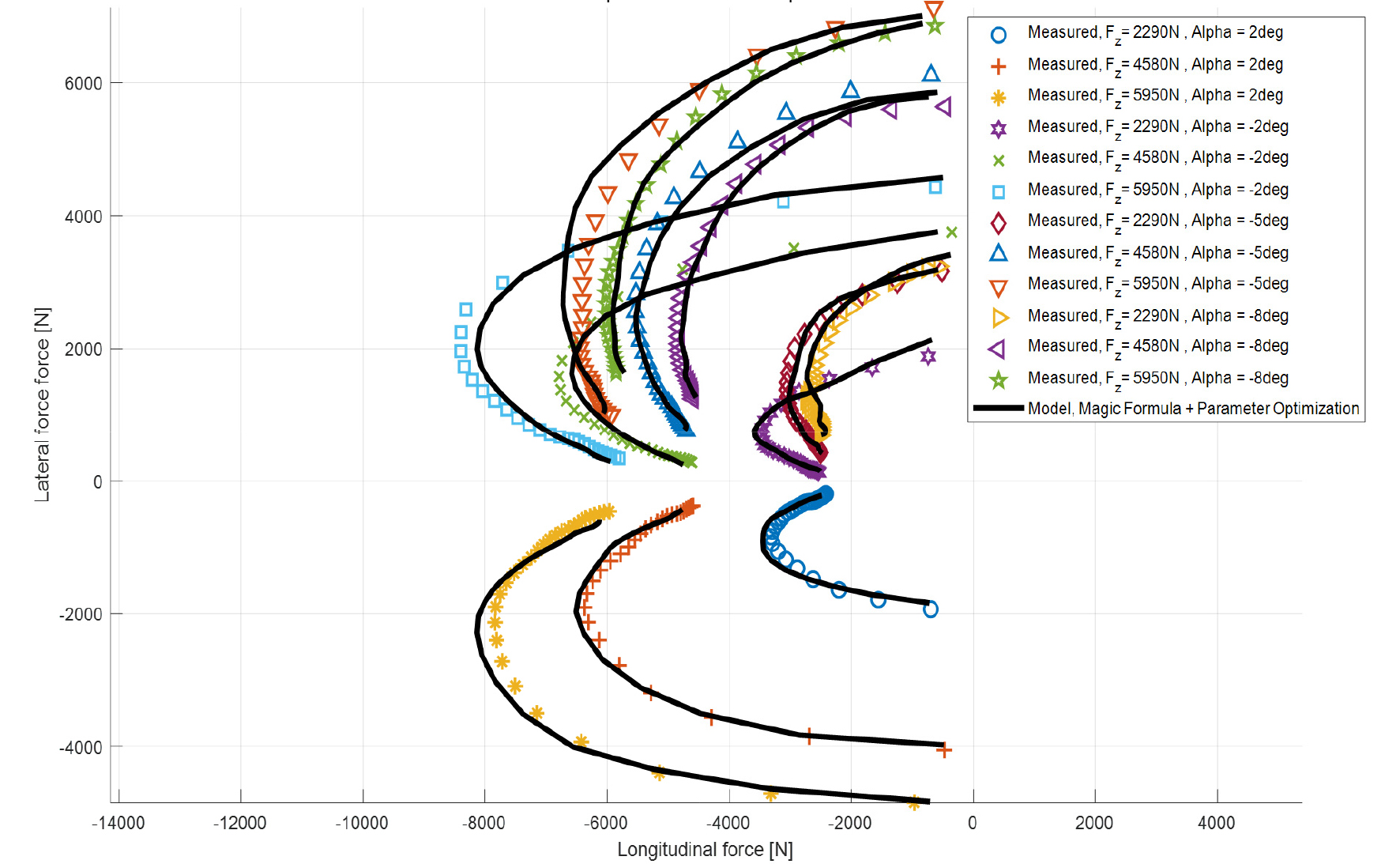
세번째 경우는 타이어의 횡방향 슬립각과 종방향 슬립율이 존재하는 경우이다. 슬립각과 슬립률은 각각 모두 타이어의 횡방향 힘과 종방향 힘에 모두 영향을 미치고, 결합 슬립(combined slip) 상태에서의 타이어 힘은 매우 복잡한 반응을 보인다. 또한, combined slip 상태에서의 타이어 힘은 비대칭성을 가지고 있기 때문에 타이어 모델만을 통하여 타이어 힘을 모사하기에는 한계가 있다.
Combined slip 상황에서의 Pacejka model을 통해 얻어진 최적화 결과는 Fig. 6과 같다. Fig. 6에서 볼 수 있듯이, 세 가지 하중조건과 세 가지 타이어 슬립각 조건에서 슬립률을 -0.5에서 0으로 변화시키며 타이어 힘을 계측하였다. 즉, 총 9가지 경우에 대해서 슬립률을 변화시키며 종방향 및 횡방향 타이어 힘을 측정하였고, 모델을 통한 모사 결과도 함께 그래프에 그려졌다. Pacejka model은 종방향 및 횡방향 힘이 양수일 때나 음수일 때 대칭성을 가지고 있고, 고정된 파라미터 값을 이용하기 때문에 실제 타이어 힘을 반영하는 데에는 내재적인 한계점을 가지고 있다.
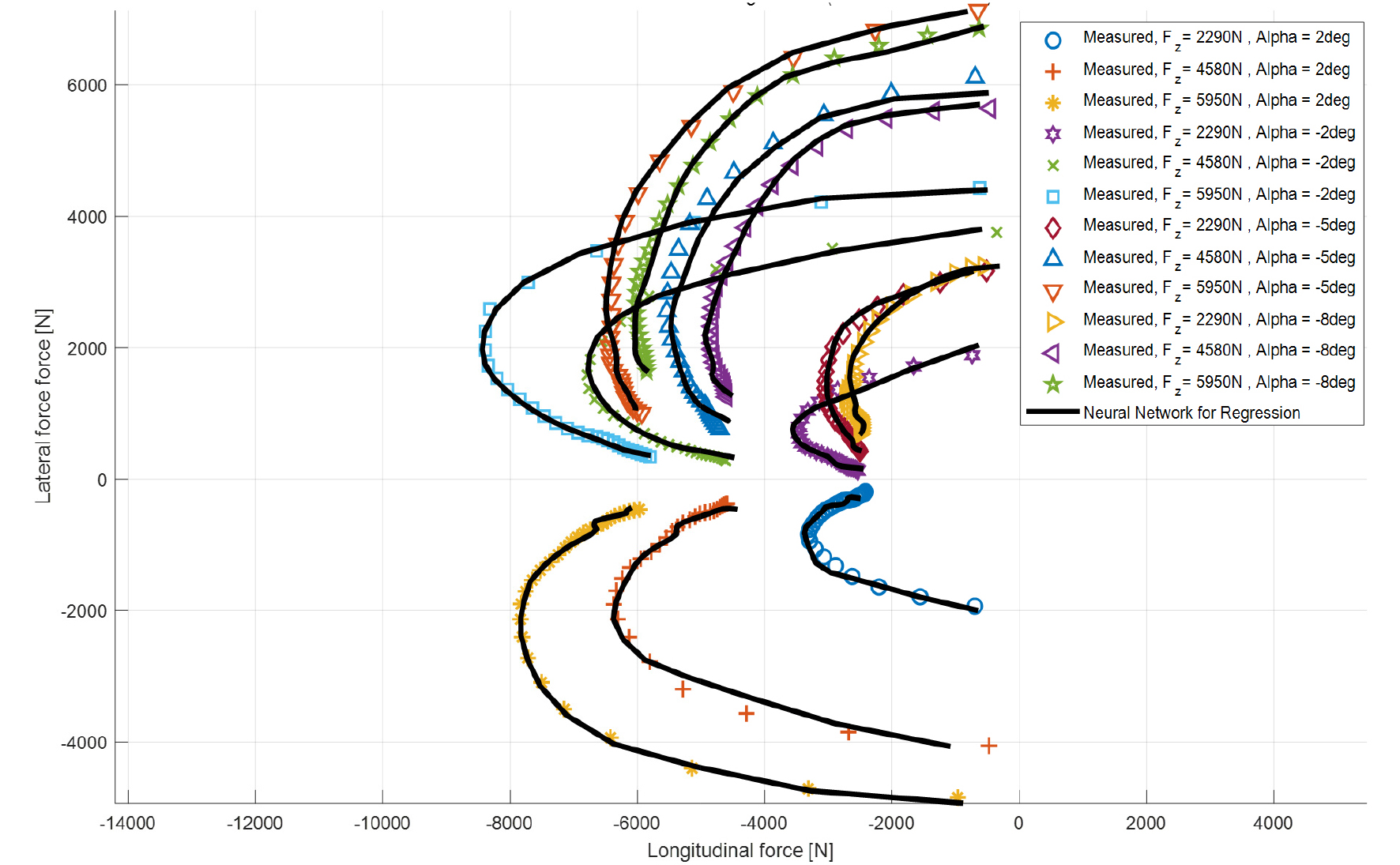
이와 반대로, 인공 신경망을 통한 타이어 힘 모사 결과인 Fig. 7에서 볼 수 있듯이, 인공 신경망을 이용하면 Pacejka model을 사용했을 때에 비해서 타이어 반응을 더욱 정교하게 표현할 수 있다. 또한, shallow neural network는 계산 부담(computation burden)이 적기 때문에 추정기 및 제어기에 사용하는 데에 어려움이 없다.
5. 결 론
본 연구에서는 전통적인 타이어 모델 중 하나인 Pacejka의 Magic formula를 기반으로 파라미터 최적화를 통해 타이어 모델링이 모사할 수 있는 타이어 힘의 최적 성능을 보였으며, 이와 동시에 데이터 기반의 인공 신경망을 이용한 타이어 힘 모사 결과와 비교하였다. Pure sideslip과 pure longitudinal slip같은 경우에는 두 가지 접근법이 모두 우수한 추정 성능을 보였다.
이와 다르게, Combined slip 상태에서의 타이어 반응은 타이어 모델로 표현하기 어려운 매우 복잡한 반응을 보였기 때문에, 인공 신경망을 이용한 추정 결과가 더욱 타이어 힘을 잘 묘사하였다. 본 연구에서는 기계 학습을 이용한 접근법을 사용함으로써 타이어의 복잡한 반응을 모사할 수 있음을 보였다.
그러나 인공 신경망을 이용한 방식은 과적합(Overfitting)의 문제와 학습되지 않은 경우(Untrained case)에 대한 내재적 위험성을 가지고 있기 때문에, 이러한 문제가 발생하지 않도록 유의하여 사용되어야 한다. 그러므로 이러한 문제를 고려한 알고리즘 설계와 검증이 앞으로 연구되어야 할 것이다.
