

기호설명
1. 서 론
2. 고장 외란 보상을 위한 시스템 모델링
2.1. 차량 모델
2.2. 후륜 조향 제어기
2.3. 조향 모터 고장 유형
2.4. 조향 모터 고장 모델링
3. 고장 허용 제어 전략
3.1. 외란관측기
3.2. 후륜 조향을 이용한 제어 전략
4. 시뮬레이션 결과
4.1. 시뮬레이션 환경
4.2. Open-loop Test
4.3. Close-loop Test
5. 결 론
기호설명
m : 차량 질량
lf : 차량 무게중심부터 전륜차축까지의 거리
lr : 차량 무게중심부터 후륜차축까지의 거리
Iz : 차량 관성모멘트
Cf, Cr : 전, 후륜 타이어 코너링 강성계수
Vx : 차량 종방향 속도
γ : 차량 요레이트
β : 차량 횡슬립각
δf, δr : 전, 후륜 조향각
αf, αr : 전, 후륜 타이어 슬립각
Fyf, Fyr : 전, 후륜 횡방향 힘
1. 서 론
최근 자율주행과 친환경 자동차와 같은 운전자 편의 및 환경 개선을 위한 차량 시스템 개발이 급속도로 발전하고 있다. 그중에서도 SbW(Steer-by-Wire) 시스템은 자동차 산업 내에서 큰 주목을 받는 미래형 자동차 조향 시스템으로서 연구개발이 진행되고 있다.(1)
SbW는 기존 기계적 조향 시스템에 기구적 연결을 제거하고 전기적 신호를 이용하여 조향 모터를 통해 조향하는 시스템이다.(2) SbW 시스템은 조향 칼럼이 제거되어 운전대의 위치를 자유롭게 조정할 수 있어 공간 활용도를 향상시키며, 기계적 응답지연이 제거되어 빠른 응답성을 갖는다. 또한, 노면의 불필요한 진동 및 소음을 차단하여 조향감을 향상시키며, 능동조향제어와 차량 통합제어와의 높은 연계성을 통해 향상된 주행 성능과 안정성을 가질 수 있다. 하지만 SbW 시스템을 구성하는 센서, 모터, 제어기 등에서 고장이 발생하면 조향 능력을 상실하여 심각한 사고로 이어질 수 있으므로 고장-안전 대응 방안이 필요하다.
SbW 시스템의 고장-안전에 관한 연구들은 활발히 진행되어 왔다. 센서 고장에 대한 연구들을 살펴보면, Son D. 등은 강건한 능동 관측기를 이용하여 센서의 노이즈와 모델 불확실성에 대해 고장 진단 및 재구성 전략을 제안하였다.(3) Zhang L. 등은 조향각 센서에 대한 고장 허용 제어 연구를 위해 칼만필터를 활용한 연구를 진행하였다.(4) 또한, 김대성 등은 SbW 시스템의 결함 발생 시에도 성능을 유지하는 E/E 이중화 제어 시스템 아키텍처와 중재 제어 전략에 대한 연구를 진행하였다.(5) 또한, SbW 시스템의 모터 고장에 관한 연구도 진행되어왔으며, Delta Operator를 이용한 모터 고장 추정(6)과 능동 진단 관측기를 사용한 조향 모터 고장 입력 보상 전략(7) 등의 연구가 진행되어 왔다. 그러나 제시된 고장 허용 제어 방법들은 모터의 입력 한계를 고려하지 않아 심각한 모터 고장을 대처할 수 없다. 그래서 대부분 논문에서는 SbW 시스템의 내결함성과 신뢰성을 향상하기 위해 Dual-motor 하드웨어 중복구조를 고려하였다.(8~12) 그러나 Dual-motor 하드웨어 중복구조는 설치 공간을 확보해야하는 공간적 제약이 발생하고 고장이 발생하지 않을 경우에는 기존의 단일 모터를 사용한 선회 주행 성능과 큰 차이가 없어 경제적으로 효율적이지 않다. 또한, 실제 파라미터에 대한 불확실성 때문에 Dual-motor 동기화 제어에 어려움이 존재한다.
본 연구에서는 SbW 시스템의 Dual-motor를 전륜이 아닌 후륜에 배치하여 4륜 조향의 비 병렬적인 하드웨어 중복구조를 이용한 고장 허용 제어 전략을 제안한다. 이를 통해 저속 선회 시 최소 회전 반경을 감소시키고 고속 선회 시에는 선회 안정성을 향상시키는 4륜 조향의 이점(13)을 활용할 수 있으며 고장이 발생했을 때 추가적인 후륜조향을 통해 고장 상황에 대응할 수 있다.
본 논문은 SbW 시스템의 전륜 조향 모터에 고장이 발생할 경우 고장 외란 관측기를 활용하여 모터 입력 보상을 수행하고 조향 모터 입력 한계에 도달하여 제한될 경우 목표 요레이트를 추종하는 슬라이딩 모드 제어기를 통해 추가적인 후륜 조향을 활용한 고장 허용 제어 전략을 제시하였다. 제안된 고장 허용 제어 전략은 MATLAB/Simulink와 차량 동역학 프로그램인 Carsim과 통합 시뮬레이션 환경에서 성능을 검증하였다.
2. 고장 외란 보상을 위한 시스템 모델링
2.1. 차량 모델
본 논문에서 SbW 시스템의 고장 허용 제어를 위해 Fig. 1과 같은 후륜 조향이 가능한 2DOF Bicycle 모델을 사용하였으며, 식 (1)과 같다.

차량의 횡방향 힘을 선형화 하면 다음과 같이 표현할 수 있다.
식 (1)과 식 (2)를 통해 다음과 같이 상태 공간 방정식으로 표현하였다.
여기서 상태방정식의 시스템행렬과 입력행렬은 각각 아래와 같다.
여기서 상태변수 벡터는 차량의 횡슬립각과 요레이트로 구성되며 입력변수 벡터는 전·후륜 조향각을 나타낸다.
2.2. 후륜 조향 제어기
본 차량은 전륜 조향에 비례하는 후륜 조향 제어를 통해 조종 안정성을 향상시키는 일반적인 4륜 조향 전략을 갖는다. 후륜 조향식은 다음과 같다.
2.3. 조향 모터 고장 유형
조향 모터에서 발생 가능한 고장 모델은 크게 4가지 유형을 분류된다.(14) 고장 유형의 종류는 Fig. 2와 같다. (a) Lock-in-Place는 모터의 출력이 고장 출력으로 고정된 경우의 고장을 말하며, (b) Float는 모터 출력이 평형 상태로 고정된 경우의 고장을 말한다. (c) Hard-over는 모터 출력이 모터의 최대 한계 출력에 고정되는 경우의 고장을 말하며, (d) Loss of Effectiveness(LoE)는 모터 출력 효율이 예상 출력보다 감소하는 고장을 말한다.
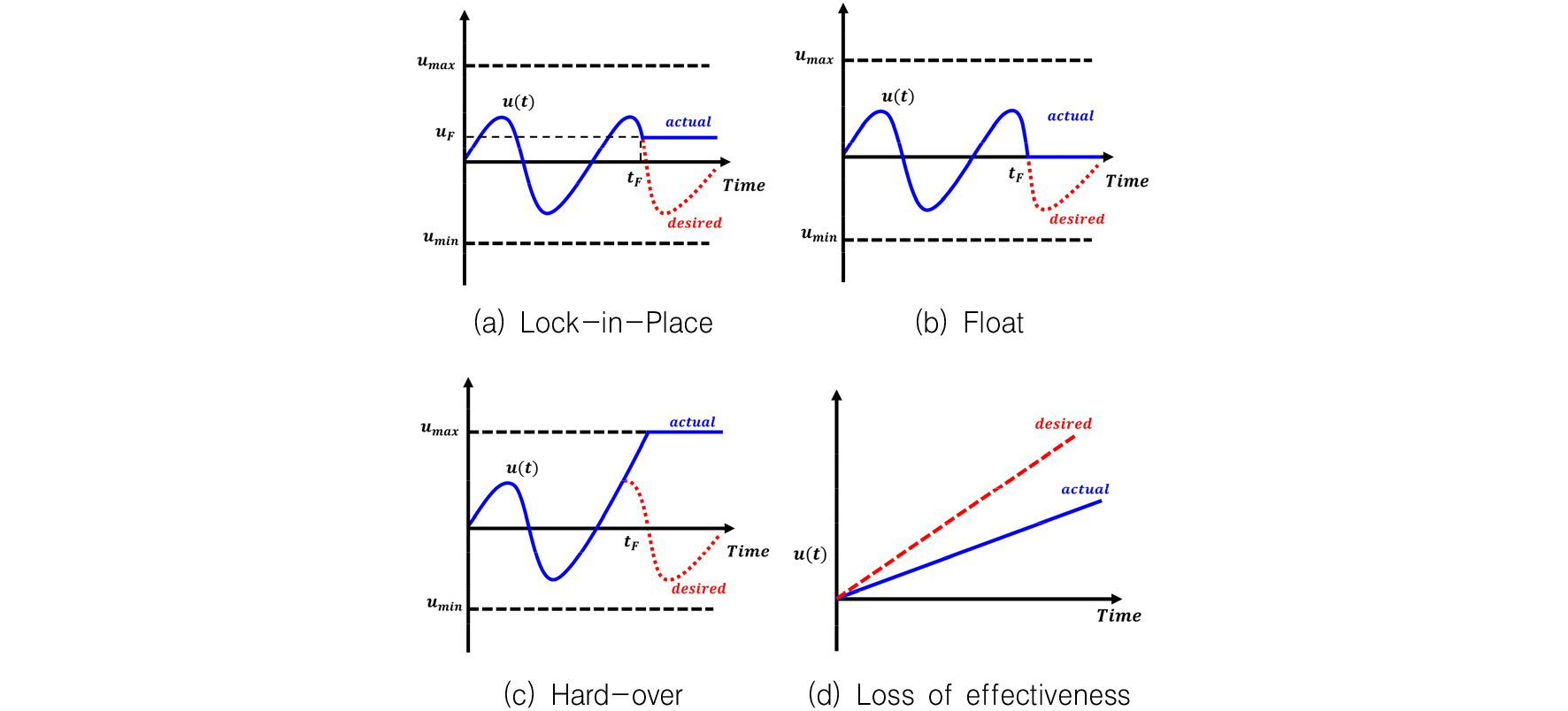
본 논문은 SbW 시스템의 전륜 조향 모터에 LoE 유형의 고장이 발생할 경우 실시간 고장 추정을 통하여 고장 상황에 대응하는 고장 허용 제어 전략에 대해 진행하였다.
2.4. 조향 모터 고장 모델링
LoE 유형의 고장을 가진 조향 모터의 조향 입력은 식 (8)과 같다.
u는 실제 조향 입력이고, u*는 전·후륜 목표 조향각으로 이루어진 고장 허용 제어 입력이다. Λu는 전, 후륜 조향 모터의 고장 성능을 나타내는 행렬이며, Λu는 다음과 같이 표현된다.
ηf,r는 전륜과 후륜의 조향 모터 성능을 나타내는 지표이고 조향 모터 상태에 따라 0~1 사이의 값으로 나타내며, 식 (10과 같다.
식 (3)에 식 (8)을 대입하여 조향 모터 고장이 발생한 시스템을 식 (11)과 같이 표현할 수 있다.
식 (11)을 통해 고장으로 인한 외란은 다음과 같이 정의할 수 있다.
3. 고장 허용 제어 전략
3.1. 외란관측기
본 논문에서는 차량의 횡슬립각과 요레이트는 센서를 통해 측정이 가능하다고 가정하였다. 고장에 의한 외란 추정은 다음과 같다.
는 고장에 의한 외란 추정값, z는 보조 벡터, L은 관측기 게인 행렬이다. 외란 추정 오차는 식 (15)와 같이 정의한다.
식 (15)를 미분하여 정리하면 다음과 같다.
식 (16)은 -LB가 허위츠(Hurwitz) 행렬이 되도록 관측기 게인 L을 설정하면 고장에 의한 외란 추정값 은 외란 d에 점근적으로 수렴한다.
고장에 대한 외란 보상을 위한 고장 허용 제어 입력은 다음 식 (17)과 같다.
3.2. 후륜 조향을 이용한 제어 전략
조향 모터에는 최대 한계 입력이 존재하여 고장 외란 보상을 통한 추가적인 조향 입력에 제한이 발생한다. 그로 인해 주행 성능이 감소하게 된다.
본 논문에서는 목표 요레이트를 추종하는 슬라이딩 모드 제어를 통해 추가적인 후륜 조향을 생성하여 고장에 대응하는 고장 허용 제어 전략을 제시한다.
3.2.1. 목표 요레이트
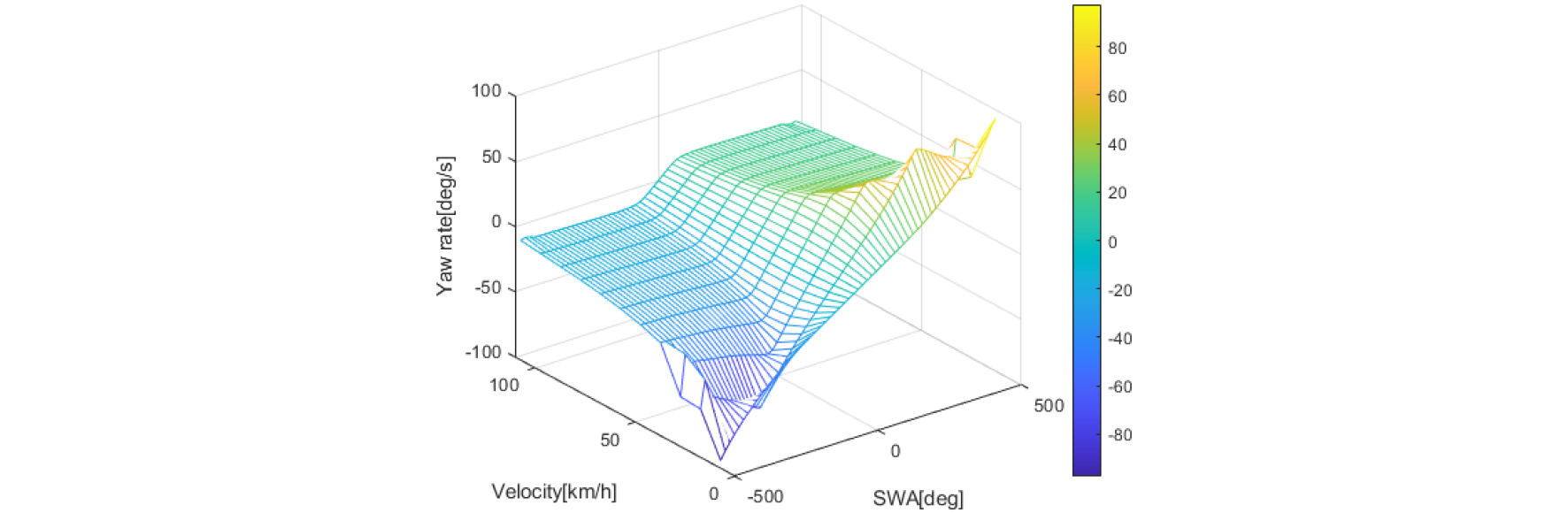
차량 시뮬레이션 프로그램 Carsim의 차량 모델을 이용하여 다양한 속도와 조향각에 따른 선회 시 정상상태에서의 4륜 조향 차량의 요레이트를 Fig. 3과 같이 맵을 작성하여 목표 요레이트로 사용하였다.
3.2.2. 슬라이딩 모드 제어기
차량 모델 파라미터의 불확실성 및 비선형성에 강인한 제어성능을 가지는 슬라이딩 모드 제어를 통해 목표 요레이트를 추종하였다.
목표 요레이트와 차량의 요레이트 추종 오차는 식 (19)로 정의한다.
슬라이딩 평면은 목표 요레이트를 추종하기 위해 식 (20)과 같이 설정하였다.
유한한 시간 내에 슬라이딩 평면에 도달할 조건은 식 (21)로 주어진다.
슬라이딩 조건을 만족하는 식 (21)과 식 (1)을 통해 추가 후륜 조향 입력을 식 (22)와 같이 나타낼 수 있다.
여기서 슬라이딩 평면으로 수렴하기 위한 제어 입력은 이산시간 신호로 인해 불연속적인 입력이 발생하여 채터링이 발생한다. 채터링을 최소화하기 위해 불연속적인 부호 함수인 sgn(s)대신 연속적인 Saturation 함수인 sat(s/ϕ)로 대체하였다.
4. 시뮬레이션 결과
4.1. 시뮬레이션 환경
SbW 시스템에서 LoE 형태의 조향 모터 고장에 대한 고장 허용 제어 전략 성능을 Fig. 4와 같이 MATLAB/Simulink와 차량 동역학 프로그램인 Carsim을 이용한 통합 시뮬레이션 환경에서 성능을 검증하였다.

시뮬레이션 대상 차량은 중형 세단급 모델인 D-class, Sedan이며, Table 1은 사용된 차량의 주요 파라미터이다.
Table 1.
Vehicle parameters for simulation
| Parameter | Value (unit) | Parameter | Value (unit) |
| m | 1530 (kg) | Iz | 2315.3 (kg·m2) |
| lf | 1.11 (m) | lr | 1.67 (m) |
| Cf | 60000 N·rad2) | r | 46500 (N·rad2) |
4.2. Open-loop Test
첫 번째 시나리오는 조향 입력에 따른 차량의 순수 반응성을 보기 위해 Open-loop 시뮬레이션을 진행하였다. 이때 운전자 조향 입력은 Step Steer로 60도, 차량의 속도는 50 km/h이며 전륜 조향 모터 고장률은 90%이다.
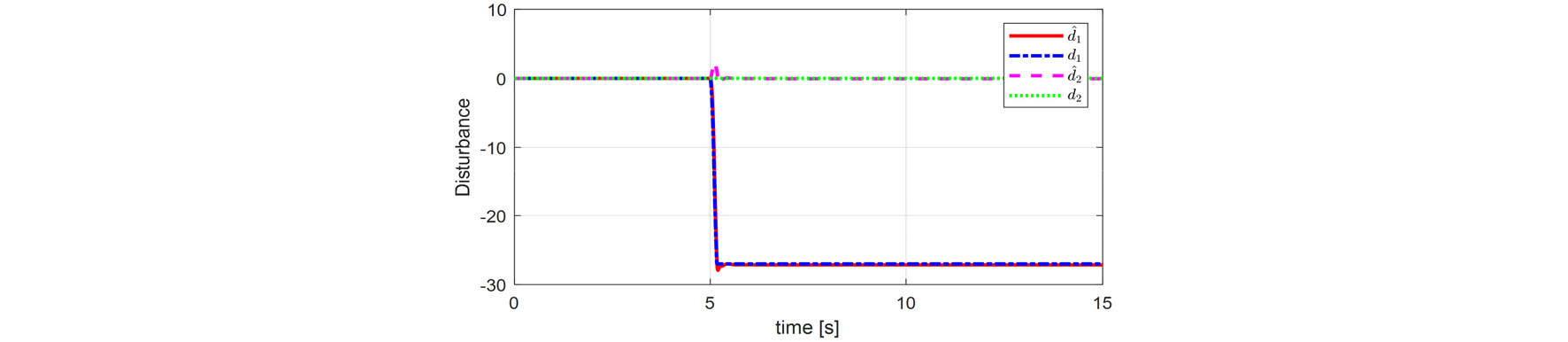
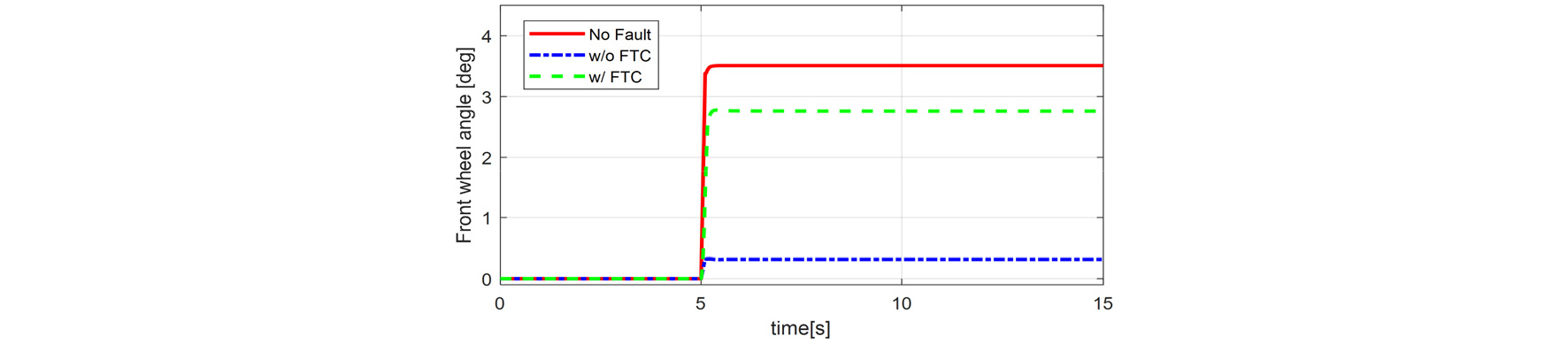
Fig. 5~9는 Open-loop 시뮬레이션 결과이다. Fig. 5의 범례 는 전륜 고장 외란 추정, 전륜 고장 외란, 후륜 고장 외란 추정, 후륜 고장 외란을 나타낸다. Fig. 6~9의 범례 No Fault, w/o FTC, w/ FTC는 정상 주행 차량, 고장 주행 상황인 차량, 고장 주행 상황에서 고장 허용 제어 전략을 갖는 차량의 결과를 나타낸다.
Fig. 5는 외란 관측기를 통한 고장 외란 추정 결과이며, LoE 고장에 의한 외란은 외란 관측기를 통해 실시간으로 고장 외란 추정하는 것을 확인할 수 있다. 하지만 전륜 조향은 고장 외란 보상에도 불구하고 조향 모터 입력 한계로 충분히 보상하지 못하는 것을 Fig. 6을 통해 볼 수 있으며, 고장 허용 제어 전략을 갖는 차량은 부족한 전륜 조향만큼 추가적인 후륜 조향 생성하는 것을 Fig. 7에서 확인 할 수 있다. 그로 인해 고장 허용 제어 전략을 갖는 차량은 정상 주행하는 차량만큼 요레이트가 발생하는 것을 Fig. 8을 통해 확인 할 수 있으며, 고장 허용 제어 전략을 갖는 차량은 정상 주행하는 차량과 동일한 수준으로 주행하는 것을 Fig. 9를 통해 확인할 수 있다.
4.3. Close-loop Test
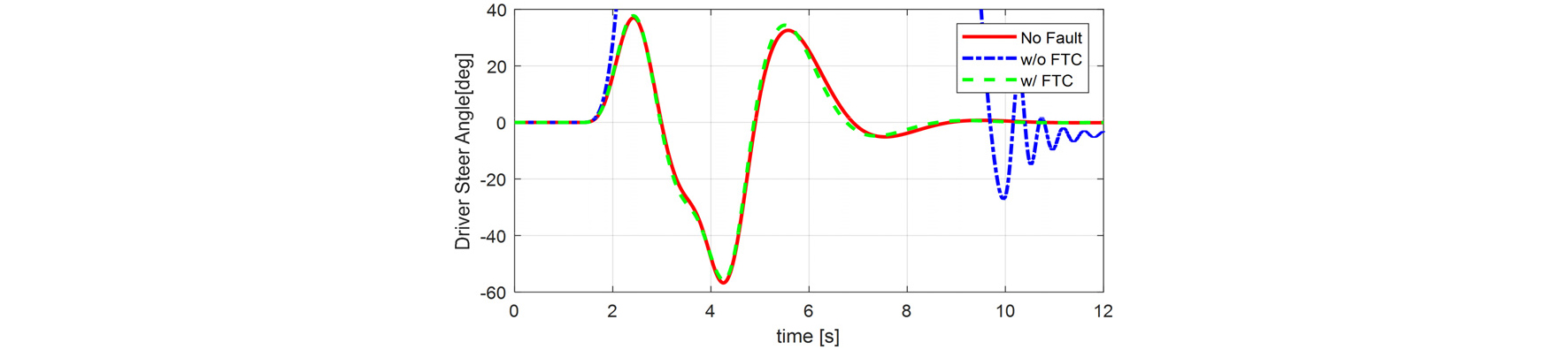
두 번째 시나리오는 운전자 모델을 고려하여 주어진 경로를 따라가는 Close-loop 시뮬레이션을 진행하였다. 급격한 이중 차선변경인 Double Lane Change(DLC) 시나리오이며, 이때 차량 속도는 100 km/h이고 조향 모터 고장률은 90%이다.
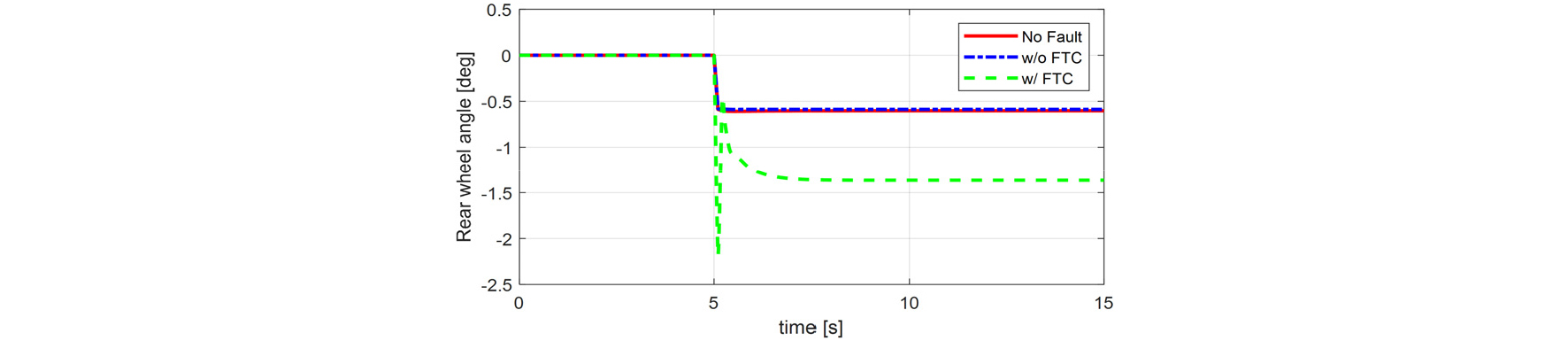
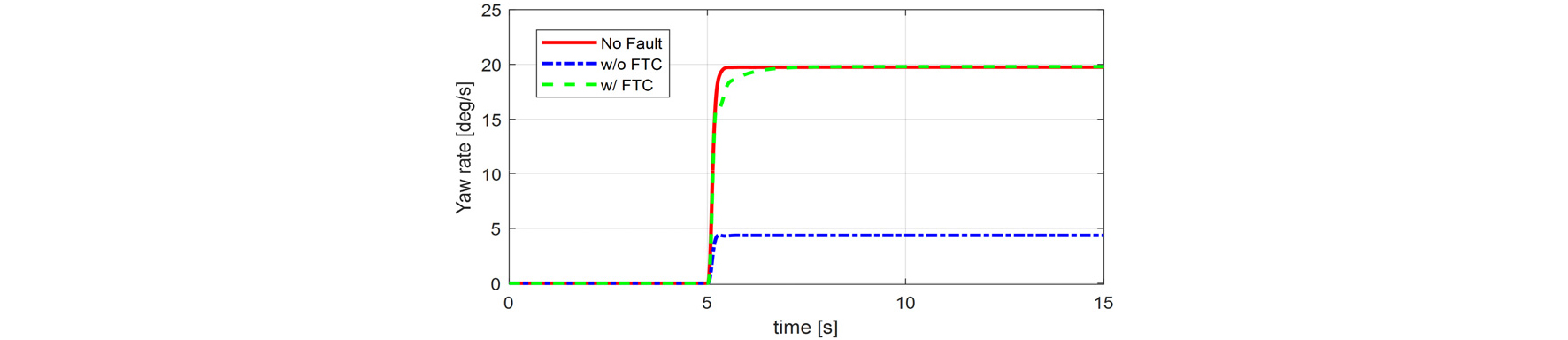
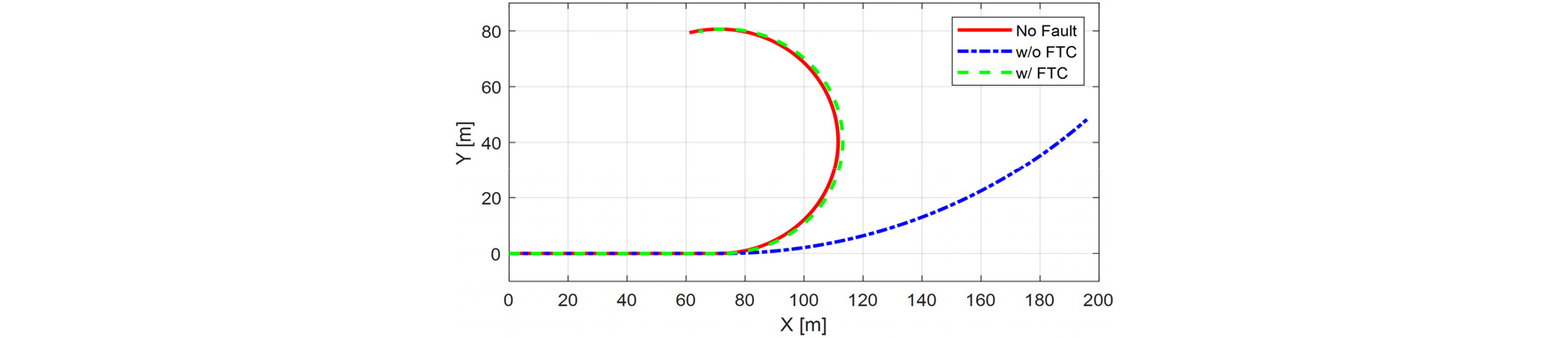
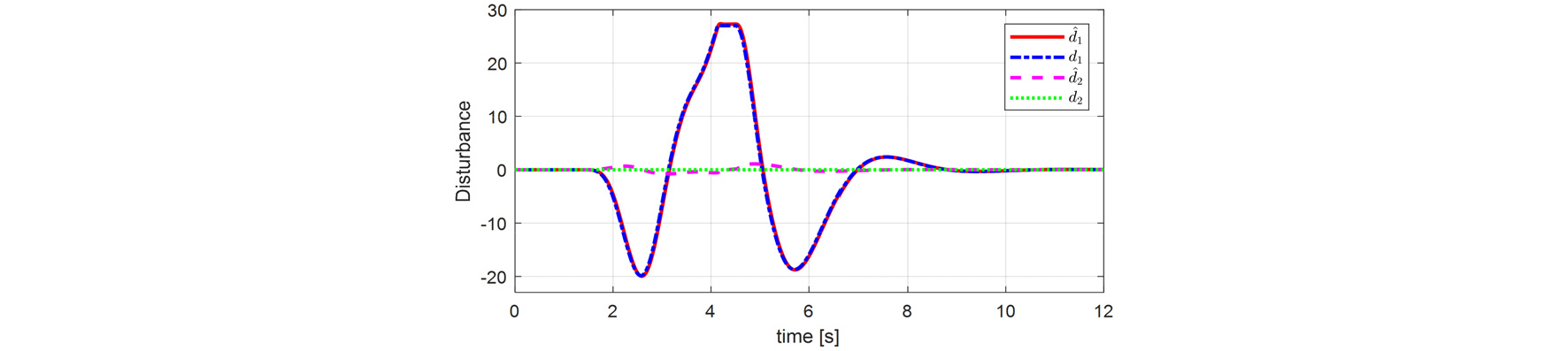
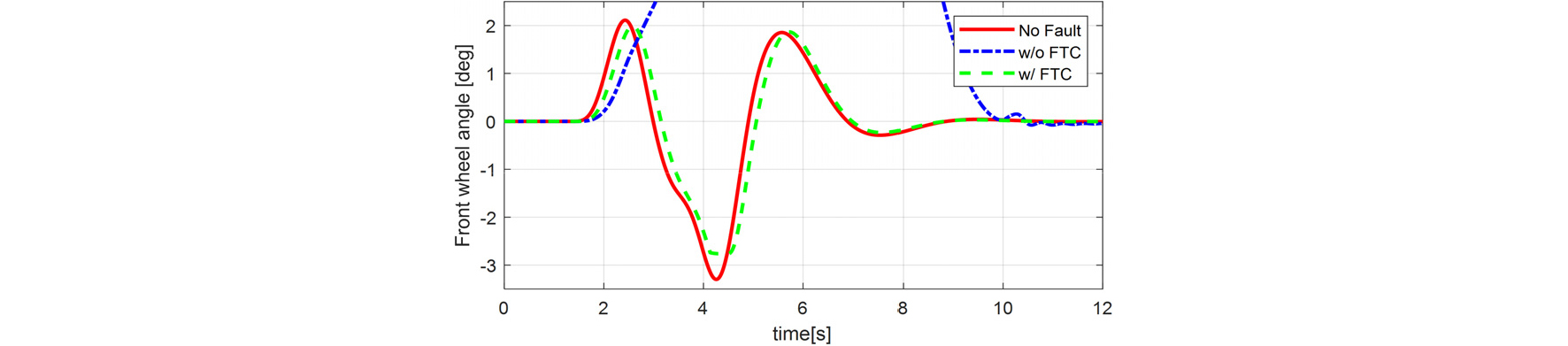
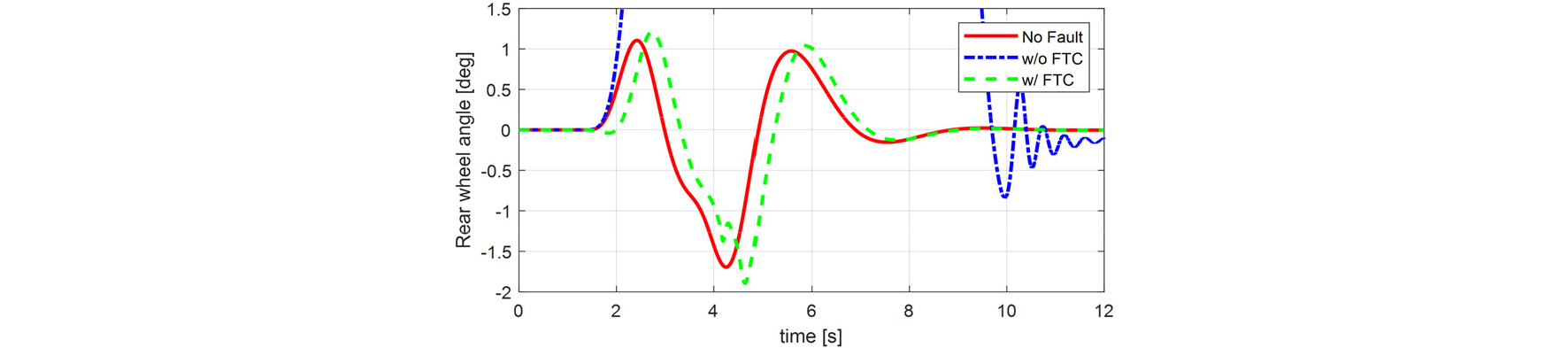
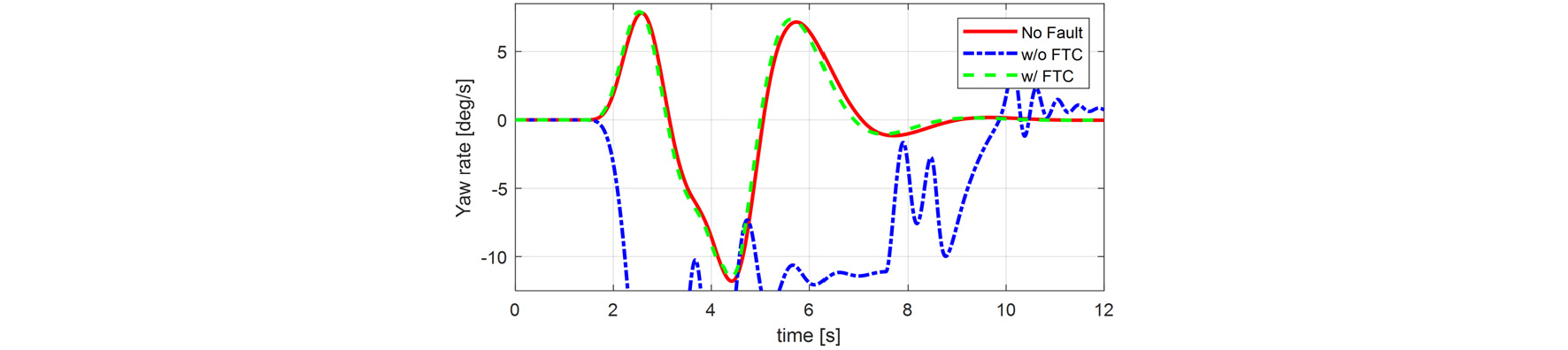
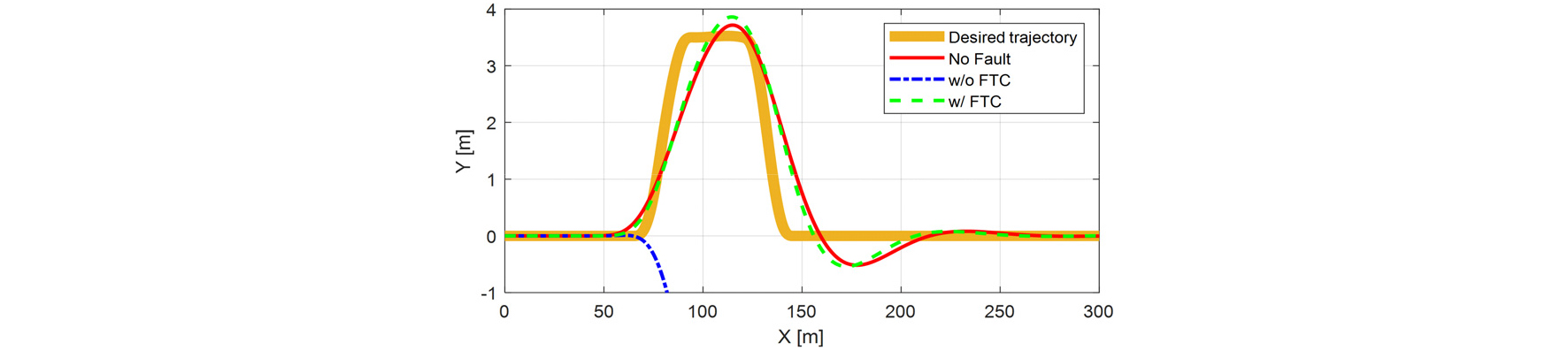
Fig. 10~15는 Close-loop 시뮬레이션일 경우의 결과이다. Fig. 10의 범례 는 전륜 고장 외란 추정, 전륜 고장 외란, 후륜 고장 외란 추정, 후륜 고장 외란을 나타낸다. Fig. 11~15의 범례 No Fault, w/o FTC, w/ FTC는 정상 주행 차량, 고장 주행 상황인 차량, 고장 주행 상황에서 고장 허용 제어 전략을 갖는 차량의 결과를 나타낸다.
Fig. 10은 외란 관측기를 통한 고장 외란 추정 결과이며, 외란 관측기를 통해 실시간으로 고장 외란 추정하는 것을 확인할 수 있다. 하지만 Fig. 11의 4초 부분에서 모터의 입력 제한으로 인해 보상하지 못하는 것을 볼 수 있으며, 고장 허용 제어 전략을 갖는 차량은 Fig. 12에서 보듯이 추가적인 후륜 조향 제어를 통해 정상 주행하는 차량만큼 요레이트가 발생하는 것을 Fig. 13에서 확인할 수 있다. 그로 인해 고장 허용 제어 전략을 갖는 차량은 주어진 경로를 잘 추종하는 것을 Fig. 14에서 볼 수 있으며, Fig. 15를 통해 고장이 발생하더라도 고장 허용 제어 전략을 통해 운전자가 안정적으로 주행하는 결과를 확인할 수 있다.
5. 결 론
본 논문은 SbW 시스템에서 LoE 형태의 심각한 조향 모터 고장을 대응하기 위한 고장 허용 제어 전략에 대해 제시하였다. LoE 형태의 모터 고장을 추정하기 위해 LoE 고장 모델을 시스템에 통합하여 고장으로 인한 외란을 모델링 하였다. 외란 관측기를 통해 고장으로 인한 외란을 추정하였으며 외란 보상 제어를 통해 추가적인 전륜 조향 입력을 생성하였다. 그리고 전륜 조향 모터 입력 제한으로 인한 부족한 보상 제어는 추가적인 후륜 조향을 통해 고장에 대응하였다. 추가 후륜 조향은 목표 요레이트를 추종하는 슬라이딩 모드 제어를 통해 운전자의 거동 의지를 따라가고자 하였다. 본 연구는 MATLAB/Simulink와 Carsim 환경에서 Open-loop의 Step Steer와 Closed-loop DLC와 같은 시나리오를 선정하여 고장 허용 제어 알고리즘 검증을 진행하였으며, 전륜 조향 모터에 LoE 고장 유형의 심각한 고장이 발생하여도 본 연구에서 제시한 고장 허용 제어 전략을 통해 운전자의 목표 거동으로 주행이 가능하다는 것을 확인하였다. 하지만 본 연구에서는 저마찰 도로 환경에 대해서 고려하지 않았으며, 향후 연구에서는 저마찰 도로 환경에 대해서 고려하여 연구를 진행할 예정이다. 그러나 본 논문에서 제시한 전략은 저마찰 도로에서 과도한 후륜 조향 입력을 요구하여 차량의 안정성을 약화시킬 수 있다. 그러므로 추가 후륜 조향과 차량 통합 제어와 연계를 통해 저마찰 도로 환경에서도 조종성과 안정성을 보장하는 고장 허용 제어 전략 연구를 진행할 예정이다.
