

1. 서 론
최근 기술의 발전으로 자율주행 자동차에 대한 개발이 빠르게 진행되고 보급되고 있다. 이에 Euro NCAP(1)에서는 자율주행 자동차의 안전성을 평가하는 프로토콜을 개발하고 자동차의 안전 등급을 부여하여 소비자들에게 차량의 안전도를 제공하고 있다. UNECE WP.29(2)에서도 GRVA를 구성하여 자율주행 자동차의 주행 시 발생할 문제에 대해 해결하기 위하여 규정을 발의 중에 있다. 또한 자율주행 자동차의 충돌사고를 예측하기 위하여 OSCCAR 프로젝트(4)에서는 각 국가의 사고 데이터를 수집하고 자율주행 자동차 가 점차 보급됨에 따라 일반 차량과 자율주행 차량 간에 사고가 발생할 것을 예측하고 정리하였다. 이러한 미래의 사고 시나리오를 이용하여 한쪽 차량이 자율주행 자동차일 경우와 양쪽 차량이 자율주행 자동차일 경우를 시뮬레이션 하였고 이를 통해 미래의 사고를 예측하였다. 국내 교통안전분석시스템(4)(TAAS)를 통해 2016년부터 2019년 사이의 도로 형태별 교통사고를 보면 교차로에서 사고가 점차 증가하는 것을 확인할 수 있다. 점차 교차로에서 사고가 증가함에 따라 국내 자동차안전도평가 프로그램인 KNCAP(5)에서도 교차로 시나리오에서 자동차 안전도 평가를 실시하는 프로토콜을 진행 중에 있다. Kim(6)은 거리 센서를 기반으로 교차로 충돌 방어 성능 평가 연구를 수행하였으며, 사람이 인지하고 반응하는 시간인 약 2.5초를 고려하였을 때 대부분의 교차로 시나리오에서 방어할 수 없는 것을 확인 하였다. Kim(7)은 카메라 센서와 레이더 센서를 이용하여 교차로 시나리오에서의 탐지성능을 평가하였다. 이에 대부분의 사고에서 센서의 제한된 시야각으로 인해 탐지가 불가능 한 것을 확인하였다. Woo(8)는 다양하고 복잡한 상황들에서 사물을 인식하고 판단, 대응해야 하는 문제점들을 통해 기술 발전 및 인프라 상황에 따른 KNCAP의 단계별 도입 및 시행 시기를 제안하였다. 이러한 교차로에서 발생하는 사고들을 방지하고자 현재 Euro NCAP에서는 자율주행 자동차의 AEB 시스템의 안전성을 평가하기 위해 후방 추돌 테스트, 오프셋 추돌 테스트를 수행하고 있으며, 최근에는 교차로 AEB 테스트도 진행하고 있다. 하지만 현재 교차로에서의 AEB 테스트 시나리오는 하나의 시나리오뿐이며, 이는 자율주행 자동차의 모든 교차로 상황의 안전성을 확보하기에는 많은 어려움이 있다.
본 연구에서는 교차로 상황의 안전성을 확보하고자 해외 및 국내 사고 데이터를 기반으로 교차로 시나리오를 도출하고, 자율주행 차량의 교차로 사고를 센서의 범위와 충돌 알고리즘에 차이에 따라 분석하였다. 먼저, 상대차량이 자율주행 자동차의 진로에 진입하면 충돌을 방지하기 위해 제동제어를 수행하는 모델 구축하여 시뮬레이션을 수행하였다. 이 충돌 예측 알고리즘과의 비교를 위해 상대차량과 시험 자율주행 차량의 경로를 3초 후까지 예측하여 제어하는 모델을 기반으로 주행 시뮬레이션을 진행하였다. 이 두 모델에 대한 시뮬레이션 결과 비교를 통하여 자율주행 자동차의 교차로 시나리오에 따른 충돌 여부를 판단하고 센서 각도 및 속도 조건에 따른 충돌 경향을 확인하였다.
2. 교차로 사고 데이터 분석
해외 NASS 데이터를 기반으로 교차로 사고를 분석하였다. LEE(9)는 미국 도로교통안전국(NHTSA)의 NASS 데이터를 도로 유형별로 분석하였다. 도로 유형별 사고는 2632건이며 그중 도심 도로의 사고 건수는 1222건으로 전체 사고의 약 46%를 차지하고 자동차 전용도로는 699건으로 약 27%를 차지하고 있다. 교외 도로는 711건으로 전체 사고 중 약 27%를 차지하고 있으며 Table 1에 나타내었다. 도심도로 사고는 Table 2에 나타내었으며 도심도로 사고 중 십자 교차로의 사고가 876건으로 가장 많았으며, 십자 교차로 중 차량 단독 사고인 91건을 제외하고 직진 차량과 직진 차량 간의 충돌이 363건으로 십자 교차로 전체 사고의 46%로 가장 높은 비율을 차지하고 있다. 십자 교차로 사고 중 직진 차량과 직진 차량 간의 충돌을 충돌 방향에 따라 구분하였으며 직진 시 우측차로에서 오는 차량과의 직선 충돌 사례인 SC/RD-SC의 경우 188건, 좌측에서 오는 차량과의 직선 수직 충돌상황 시나리오인 SC/LD-SC의 경우 175건인 것을 확인하였고 Table 3에 표기하였다.
Table 1.
Accident Frequency by Road Type on NAS
| Accident frequency by road type | ||
| Road type | Number of accidents | Accident rate(%) |
| Freeway | 699 | 27 |
| Urban | 1220 | 46 |
| Rural | 711 | 27 |
Table 2.
Accident Frequency by Type of Urban Road on NASS
| Urban road | Road type | Number of accidents | Accident rate (%) |
| Intersection | 876 | 72 | |
| Three-way intersection | 310 | 25 | |
| Four or more intersections and other | 34 | 3 |
Table 3.
Frequency of straight-straight collisions at intersections
| Cross roads | Road type | Number of accidents | Accident rate (%) | |
| Straight-Straight collision | SC/RD-SC | 188 | 24 | |
| SC/LD-SC | 175 | 22 | ||
| Etc | 422 | 54 | ||
국내 사고의 경우, 국내 차대 차 사고 심층 분석 데이터(10)를 참고하였다. 총 200건의 교차로 충돌데이터이며 Table 4에 나타내었다. 200건의 사고 데이터중 가장 많이 발생한 유형은 좌회전 시 맞은차로 직직 충돌(LT/OD-SC) 시나리오이며, 이는 전체 분석 건수 중 27건으로 약 13%를 차지하고 있다. 두 번째로 많은 시나리오인 직진 시 맞은차선 좌회전 충돌(SC/OD-LT) 시나리오는 좌회전 시 맞은차로 직진 충돌(LT/OD-SC) 시나리오에서 두 차량의 위치를 반대로 구성한 시나리오며, 26건으로 약 13%를 차지하고 있다. 세 번째로 많은 시나리오는 직진 시 우측차로 직진 충돌(SC/RD-SC) 시나리오와 우회전시 맞은편차로 좌회전 충돌(RT/OD-LT)이며 22건으로 약 11%를 차지하고 있다. 직진 시 우측차로에서 좌회전 충돌(SC/RD-LT) 시나리오는 네 번째로 많은 시나리오며 21건으로 약 11%를 차지하고 있다.
Table 4.
Car-to-Car accident analysis data in Korea
| Accident type | Number of analyzes |
| LT/OD-SC | 27 |
| SC/OD-LT | 26 |
| SC/RD-SC | 22 |
| RT/OD-LT | 22 |
| SC/RD-LT | 21 |
| Etc | 82 |
| Total | 200 |
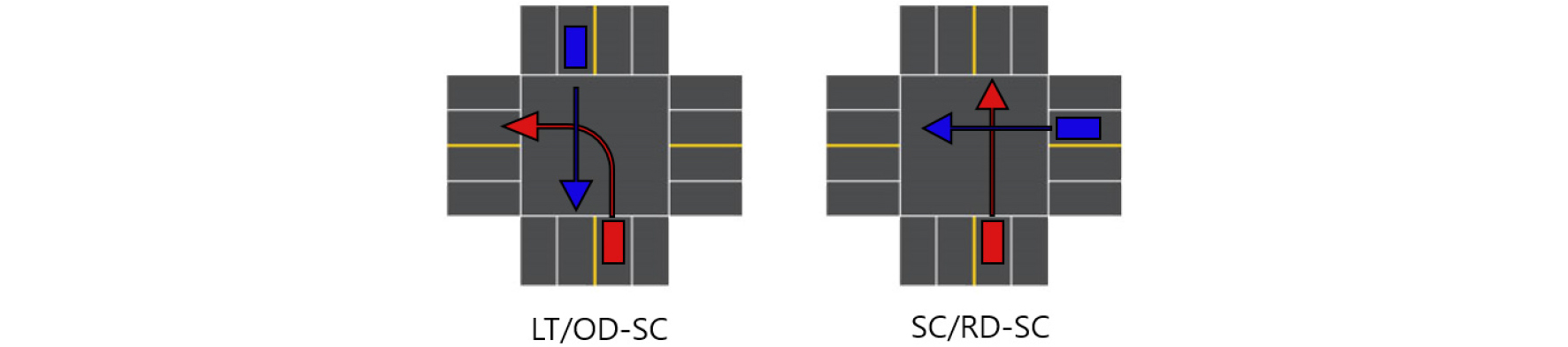
앞서 확인한 데이터를 활용하여 시뮬레이션에 필요한 두 가지 시나리오를 도출하였다. 시나리오는 해외 데이터와 국내 데이터에서 각각 빈도가 높은 대표 케이스 하나를 선정하였으며, NASS 데이터에서 분석한 도심도로 십자 교차로 중 가장 많은 사고 건수를 가지고 있는 SC/RD-SC와 국내 사고 데이터 중 가장 빈도가 높은 LT/OD-SC 시나리오를 선정하였다. 선정된 시나리오를 도식화하여 Fig. 1과 같이 나타내었다. 선정된 시나리오에서 빨간색 차량을 자기차량(Ego vehicle)으로 정의하고 파란색 차량을 타겟차량(Target vehicle)으로 정의하였다.
3. 경로예측 모델 및 AEB 모델
3절에서는 자율주행자동차가 센서로부터 얻은 정보들을 기반하여 경로를 예측하는 모델에 대해 설명한다. 경로예측모델로는 물리 기반 모델인 Constant Velocity(CV) 모델과 Constant Turn Rate Velocity(CTRV) 모델을 이용하였다. CV 모델은 식 (1)과 같이 차량의 yaw rate를 반영하지 않는 직선운동에서 적합한 모델이며, CTRV 모델은 식 (2)와 같이 차량의 요레이트(yaw rate)를 반영하여 회전운동을 나타내는데 적합한 모델이다.
본 논문에서는 CV 모델과 CTRV 모델을 이용하여 경로를 예측하였으며, 주행상황에 맞춰 모델이 전환되도록 설계하였다. 모델 간 전환이 되는 기준은 Park(11)의 끼어들기 실험 중 직선 구간에서의 yaw rate의 범위를 확인하고 이 범위를 포함할 수 있는 값을 선정하였다. 기준 값은 Table 5와 같이 선정된 총 6번의 실험을 통해 도출한 요레이트의 평균 값인 2.15deg/s를 이용하였다.
Table 5.
Yaw rate vaule on Cut-in test
| Test Case | Yaw rate (deg/s) |
| 1 | 2.16 |
| 2 | 2.04 |
| 3 | 1.98 |
| 4 | 2.25 |
| 5 | 2.19 |
| 6 | 2.28 |
| Average | 2.15 |
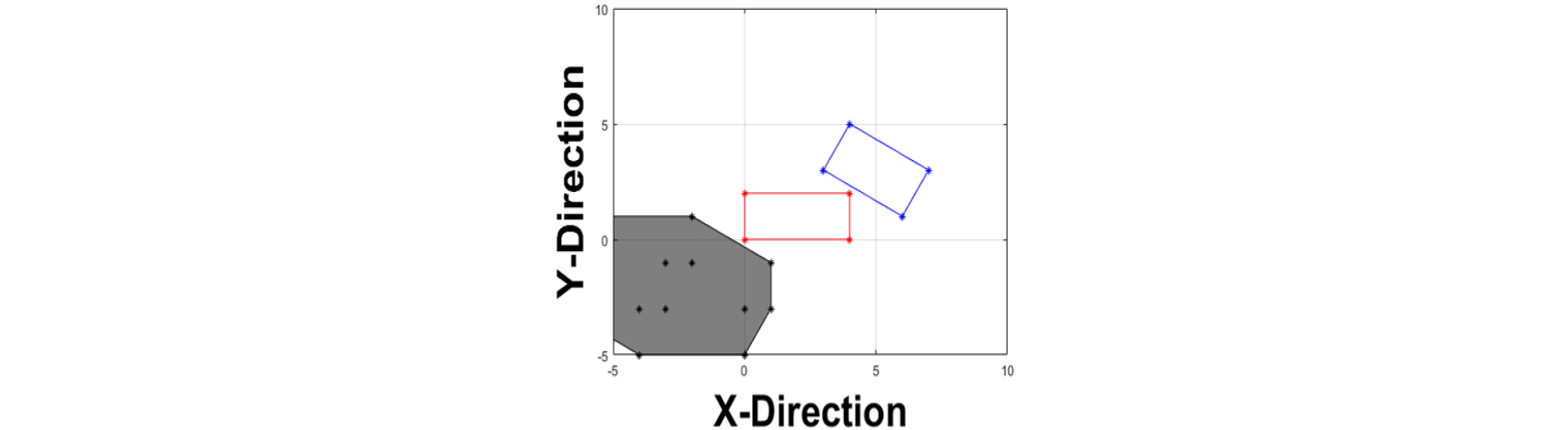
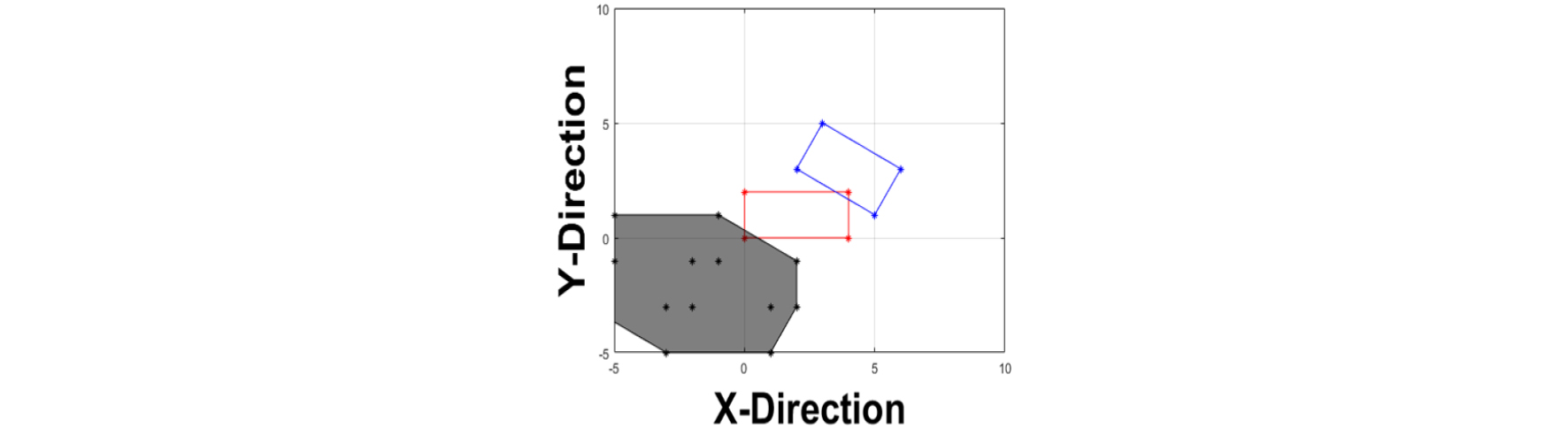
CV 모델과 CTRV 모델을 이용하였고 Kim(6)의 연구에 따르면 사람이 인식하고 제동하는데 까지 2.5초로 가정하였고, Lee(12)의 연구 자료에 따르면, 차량 6종의 위험을 알리는 경고 시스템의 발생 시간은 충돌 전 평균 약 2.88초다. 따라서 이를 포괄할 수 있는 예측범위를 갖추기 위해 이를 통해 두 차량의 시간 별 예측 포인트는 0.3초씩 10개의 점을 표기하여 총 3초의 경로를 예측하고 표기하였다. 예측된 포인트를 기준으로 경로를 폴리곤화 하였으며, Convex hull 알고리즘과 민코스키 차이 (Minkowski difference)를 이용하여 두 차량의 예측 경로가 교차하는지 판단하였다. 민코스키 차이를 이용하여 두 차량의 폴리곤화된 경로의 차를 구하여 새로운 좌표를 구할 수 있으며, Convex hull 알고리즘을 통해 좌표 점들의 최외곽 포인트를 연결시켜 새로운 도형을 생성하였다. Convex hull 알고리즘과 민코스키 차이를 이용하여 형성한 도형이 원점을 포함하고 있으면 충돌, 아니면 미 충돌로 판단할 수 있다. Fig. 2와 Fig. 3에 Convex hull 알고리즘과 민코스키 차이를 이용한 예시를 도식화하여 나타내었다.
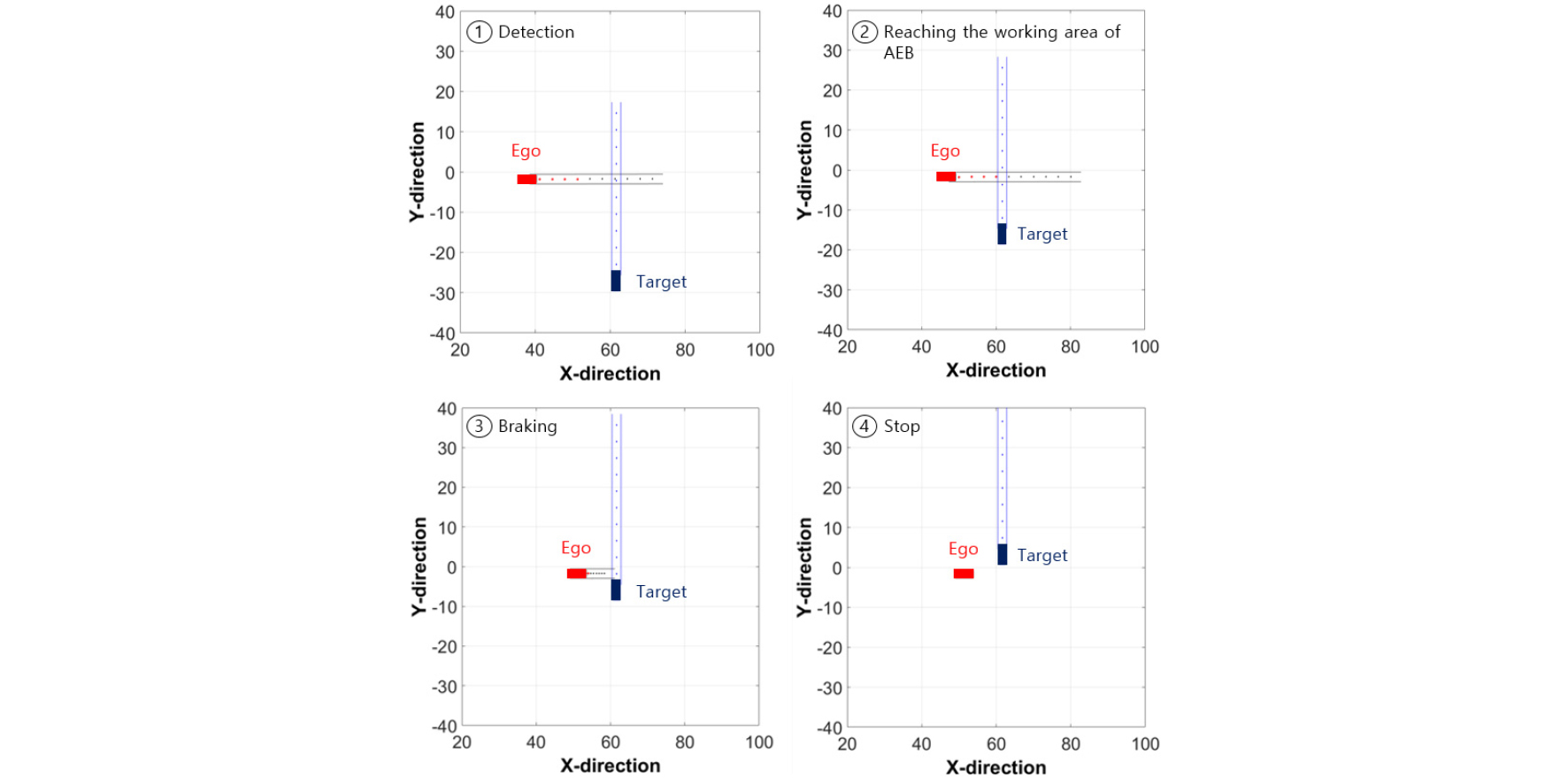
AEB(Autonomous Emergency Braking)는 자동긴급제동장치로 위험을 인지하여 사고를 방지하거나 최소화하는 기능이다. 본 논문에서 AEB는 TTC(Time To Collision)을 기반으로 작동하며, 사고를 방지하기 위하여 AEB 시스템의 작동 범위를 현재 Ego 차량의 속도(VEgo)를 제동 시 발생되는 최대 감속도(amin)으로 나누어 제동시간을 선형적으로 도출하여 적용하였다. amin의 값은 Park(11)에서 나타난 실험 감속도와 같이 –1g로 설정하였다. 이때 구해지는 제동시간은 AEB가 작동해야하는 임계값(TTCthd)으로 사용하였다. Ego차량의 계측을 통해 계산되어지는 TTCcal는 앞에서 설명한 경로예측모델을 이용하여 충돌 예측 지점을 확인하고 현재 내 차량에서 충돌 예측 지점까지의 거리를 Ego 차량의 속도로 나누어 도출하였다. 이를 기반으로 TTCcal≤TTCthd와 같이 차량이 제동하여 멈추는 데까지의 시간보다 현재차량이 경로예측을 통해 계산한 충돌까지의 남은 시간이 작거나 같아지면 AEB를 작동시키도록 설계하였고 작동범위를 붉은 색 포인트로 표기하였다. 경로예측의 좌우측 범위는 센서의 노이즈 및 차량의 크기를 고려하여 Fig. 4와 같이 차량중심으로 부터 1.45m 떨어진 경계로 구성하였다. 경로예측모델과 AEB모델을 이용한 예시를 Fig. 5에 도식화하여 나타내었다. Fig. 5의 1번 그림은 Ego 차량이 Target 차량을 인식하고 경로를 예측하는 상황이며, 2번 그림은 경로예측을 통해 도출한 충돌 포인트에 AEB 작동 영역이 도달한 상황이다. 3번과 4번 그림은 각각 AEB 작동 후 제동 및 정지하는 상황이다.

x : x-position [m]
y : y-position [m]
v : Velocity [m/s]
ψ : Yaw [rad/s]
ψ : Yawrate [rad/s2]
t : Time [s]
4. 시뮬레이션 환경 구성 및 진행 방법
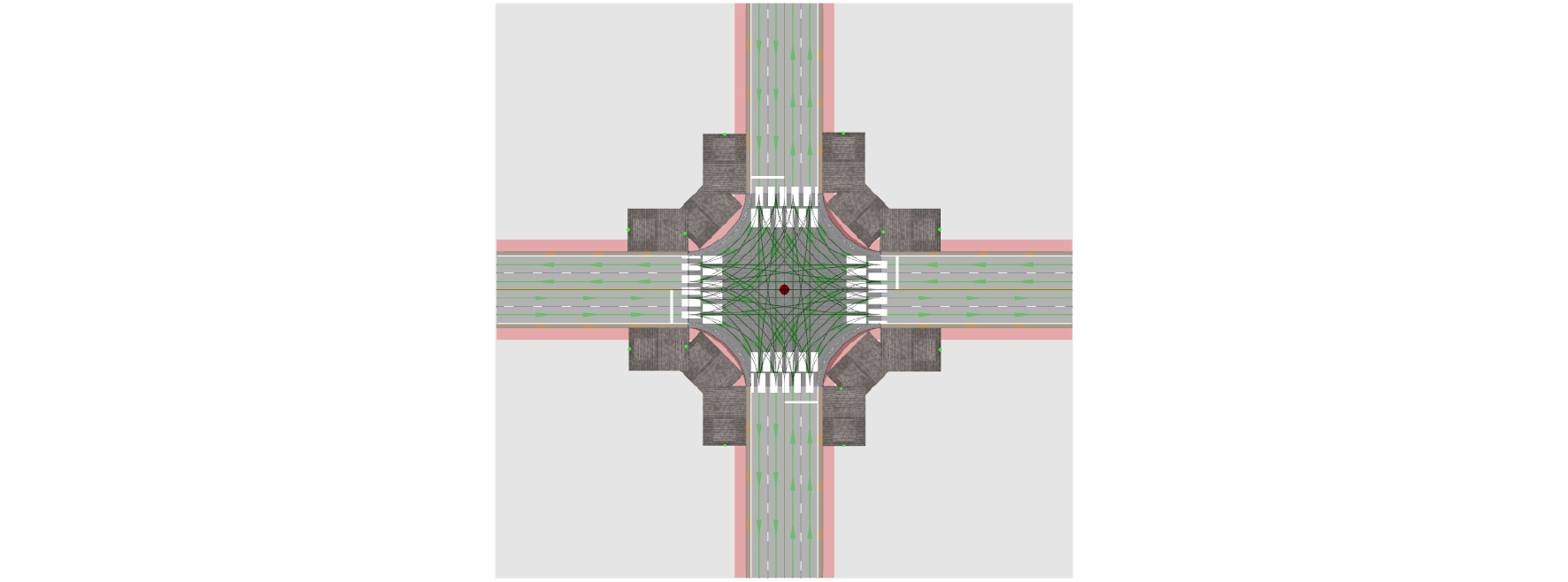
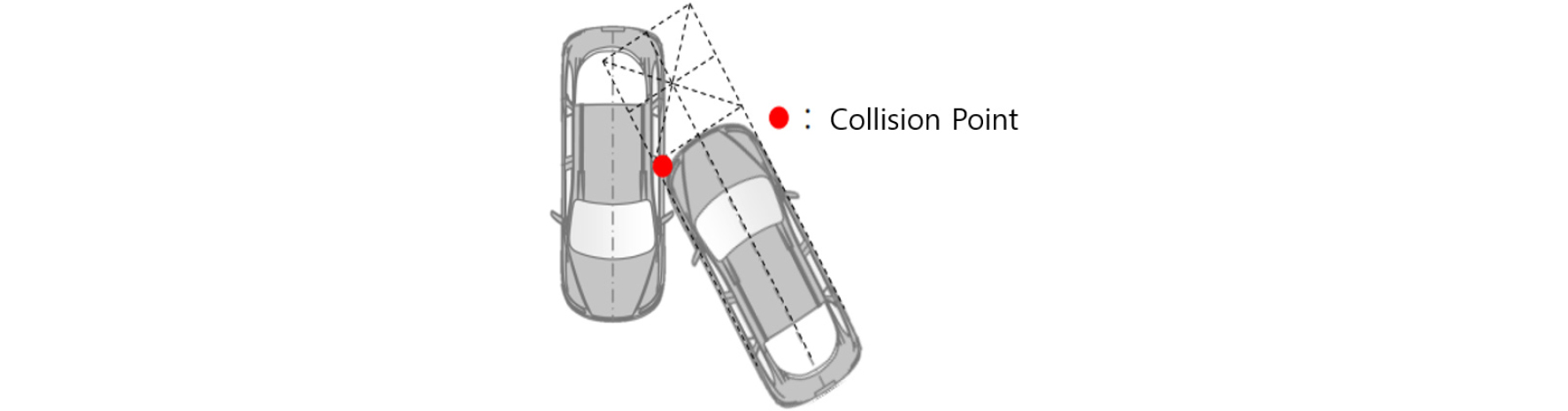
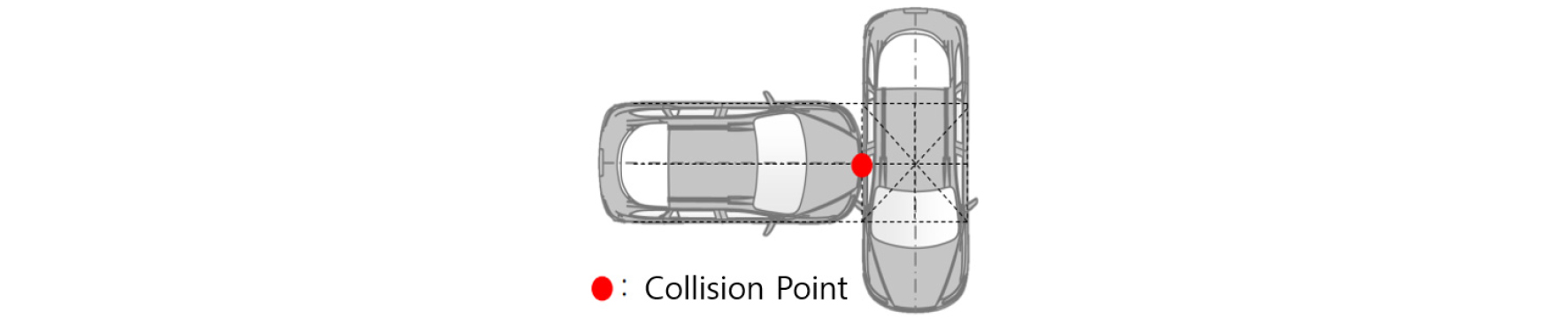
시뮬레이션은 주행 시뮬레이션 프로그램인 CarMaker를 사용하여 차대 차 교차로 환경을 구성하였다. 교차로는 십자 교차로로 구성하였으며, 차선의 폭은 3.5m로 설정하였다. 날씨, 온도, 바람 등의 환경 변수는 CaMaker에서 제공하는 기본(Default) 값을 이용하였으며, 평균 기온 20°C, 공기밀도 1.205kg/m3, 대기압 1.013bar, 습도 60%, 태양복사열 400W/m2, 강수량 0mm/h와 같이 설정하였다. 또한 차량의 속도에 영향을 미칠 수 있는 신호 체계는 없다고 가정하였으며, 교차로에서 보행자들과 건물들로 인해 센서의 시야가 가려지는 것을 구현하기 위해 Fig. 6과 같이 도로를 따라 건물을 배치하여 센서의 시야를 차단하였다. 차대 차 교차로 시나리오에서 차량의 충돌 포인트는 차량의 위치, 차량의 속도에 영향을 받기 때문에 사전에 결정할 필요가 있었으며, NHTSA에서 발표한 보고서(5)와 OSCCAR 프로젝트를 참고하여 Fig. 7과 Fig. 8과 같이 차량의 중앙에 충돌하도록 충돌 포인트를 구성하였다.
차량 모델과 센서 모델은 CarMaker에서 제공하는 모델을 사용하였다. 차량 모델은 BMW5이며, 전장은 4.93m, 전폭은 1.8m, 전고는 1.48m인 모델이다. 센서는 CarMaker에서 제공하는 카메라 센서(Camera sensor), 물체센서(Object sensor), 관성센서(Inertia sensor)를 사용하였다. 물체센서는 이상적인 센서로 물체의 거리 및 속도 등을 측정하는 용도로 사용하였으며 차량 객체를 인식할 수 있는 카메라 센서와 차량의 위치, 속도, 가속도 등을 확인 할 수 있는 관성센서를 사용하였다. 센서의 장착위치는 차량의 후사경 앞부분에 장착하였다. 카메라의 감지 성능은 기본 값으로 설정하였다.
시뮬레이션은 두 가지 모델을 이용하여 진행하였다. 첫 번째 모델은 CarMaker 센서의 기본 기능을 이용한 모델이며, Target 차량이 Ego 차량이 주행하는 경로에 진입하면 제어하는 모델이며 A모델이라 지칭하였다. 두 번째로 경로 예측을 이용하여 충돌 지점을 예측하고 AEB를 작동시키는 모델이며 B모델이라 지칭하였다. 시나리오의 두 차량의 속도 조건은 각각 10km/h, 20km/h, 30km/h, 40km/h, 50km/h으로 변화시켜가며 총 25개의 케이스를 시뮬레이션 하였다. 추가적으로 Table 6과 같이 다기능 카메라(Multi-Function Camera) 센서의 범위 100°를 기준으로 ±30°각도 차이의 범위를 선정하였고, 센서 각을 70°, 80°, 90°, 100°, 110°, 120°, 130°로 각도를 10°씩 변화시켜가며 모델 당 각각 350건 총 700건의 선정된 시나리오를 시뮬레이션을 진행하였다.
5. 시뮬레이션 결과 및 분석
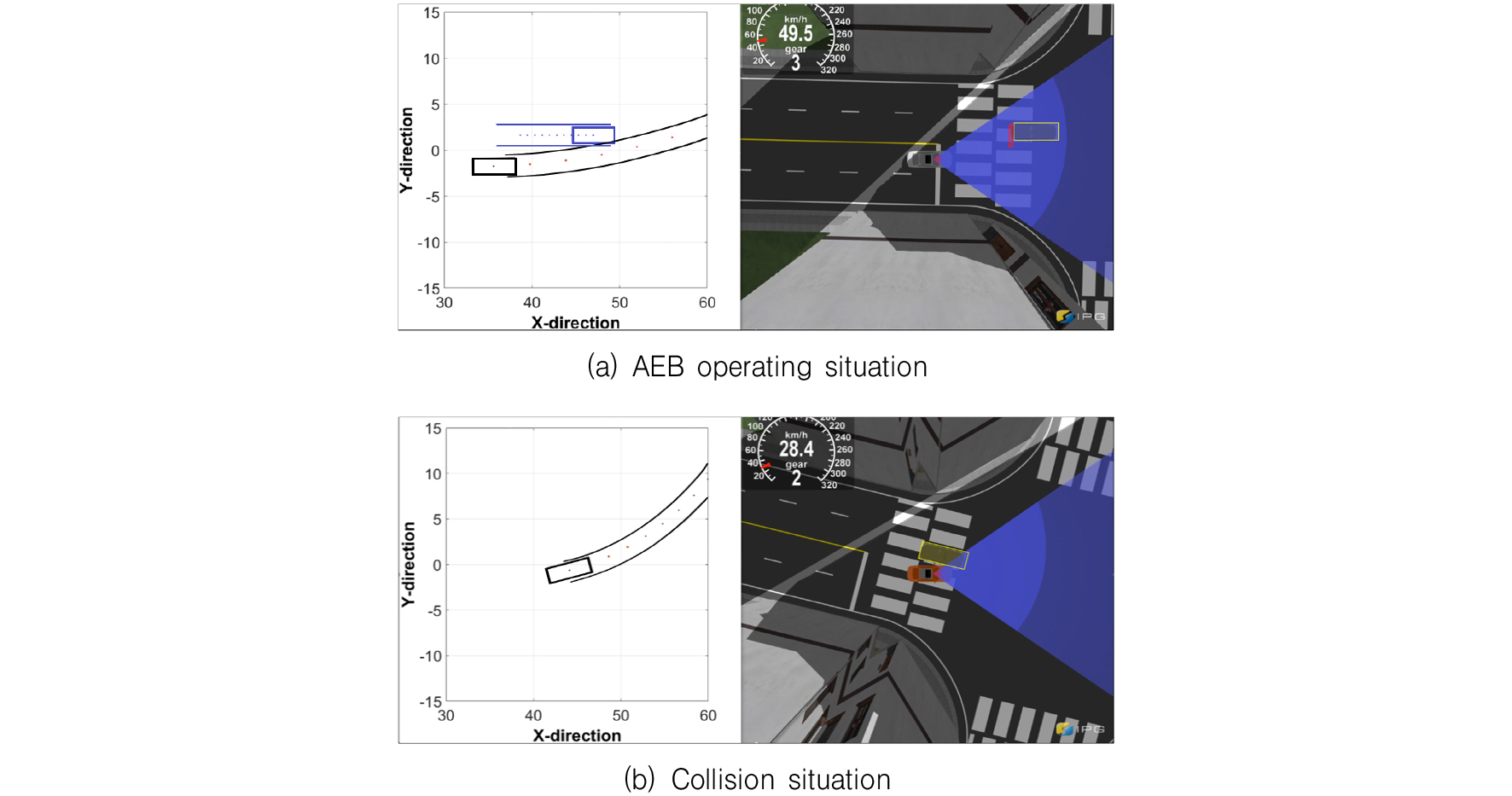
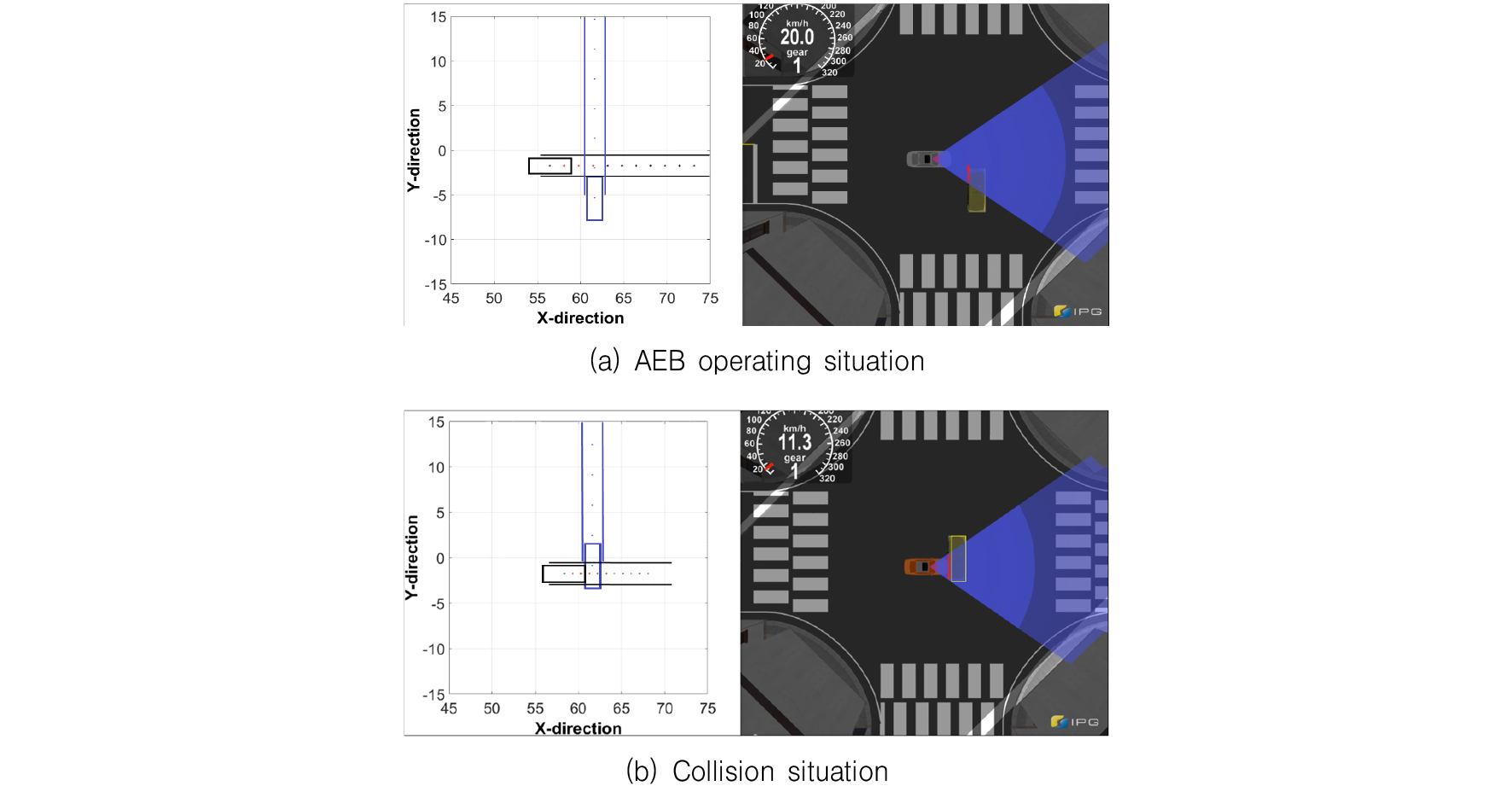
A모델과 B모델의 시뮬레이션 결과를 분석하였다. Fig. 9와 Table 7을 보면 LT/OD-SC 시나리오에서 A모델을 적용했을 때, 모든 센서 각도에서 같은 충돌 횟수 및 케이스를 갖으며, 자기 차량의 속도 50km/h과 타겟 차량의 속도가 각각 10km/h, 20km/h 2가지 속도 케이스에서 충돌이 발생하였다. 이는 전체 25건의 사고 중 8%를 차지하며 충돌이 발생한 원인은 Ego 차량이 직진 주행 중 회전하게 되어 주행 경로가 변경되는 데 Fig. 10(a)와 같이 AEB 작동 영역 중간에 Target 차량이 인식되어 충분한 제동거리를 확보하지 못하고 Fig. 10(b)와 같이 자기차량이 타겟 차량의 측면에 충돌하였다.
Table 7.
Collision according to velocity change in Left Turn/Opposite Direction-Straight Cross scenarios (sensor angles 70 degrees, model A)
| 70° | Target vehicle velocity [km/h] | |||||
|
Ego vehicle velocity [km/h] | 10 | 20 | 30 | 40 | 50 | |
| 10 | - | - | - | - | - | |
| 20 | - | - | - | - | - | |
| 30 | - | - | - | - | - | |
| 40 | - | - | - | - | - | |
| 50 | V | V | - | - | - | |
SC/RD-SC 시나리오에서 A모델을 적용하면 마찬가지로 Fig. 11과 Table 8과 같이 모든 센서 각도에서 같은 충돌 횟수 및 속도 케이스를 갖으며, 12건의 사고가 발생하였다. 이는 전체 25건의 사고 중 48%를 차지하고 자기차량과 타겟차량의 속도가 빠를수록 충돌하는 경향을 확인하였다.

Table 8.
Collision according to velocity change in Straight Cross/Right Direction-Straight Cross scenarios (sensor angles 70degree, model A)
| 70° | Target vehicle velocity [km/h] | |||||
|
Ego vehicle velocity [km/h] | 10 | 20 | 30 | 40 | 50 | |
| 10 | - | - | - | - | - | |
| 20 | - | - | - | V | V | |
| 30 | - | - | V | V | V | |
| 40 | - | - | V | V | V | |
| 50 | - | V | V | V | V | |
충돌이 발생하는 주요 원인은 자기차량의 주행 경로에 타겟차량이 진입했을 때 제어하기 때문에 Fig. 12(a)와 같이 AEB를 작동시켰을 때는 이미 정지하는 제동거리보다 더 가까이 Target 차량이 위치해 있어 충분한 제동을 하지 못하고 Fig. 12(b)와 같이 충돌하는 것을 확인하였다.
LT/OD-SC 시나리오에서 B모델을 적용하면 Fig. 13과 Table 9와 같이 모든 센서 각도에서 충돌을 회피하는 것을 보여주었다. 그 이유는 자기차량의 반대편에서 타겟차량이 접근해 오는 것이기 때문에 센서를 통해 계측하여 경로를 예측하고 있으며, 이를 통해 Fig. 13(a)처럼 충돌 포인트를 계산하고 미리 AEB를 작동시켜 Fig. 13(b)와 같이 충돌이 발생하지 않았다.
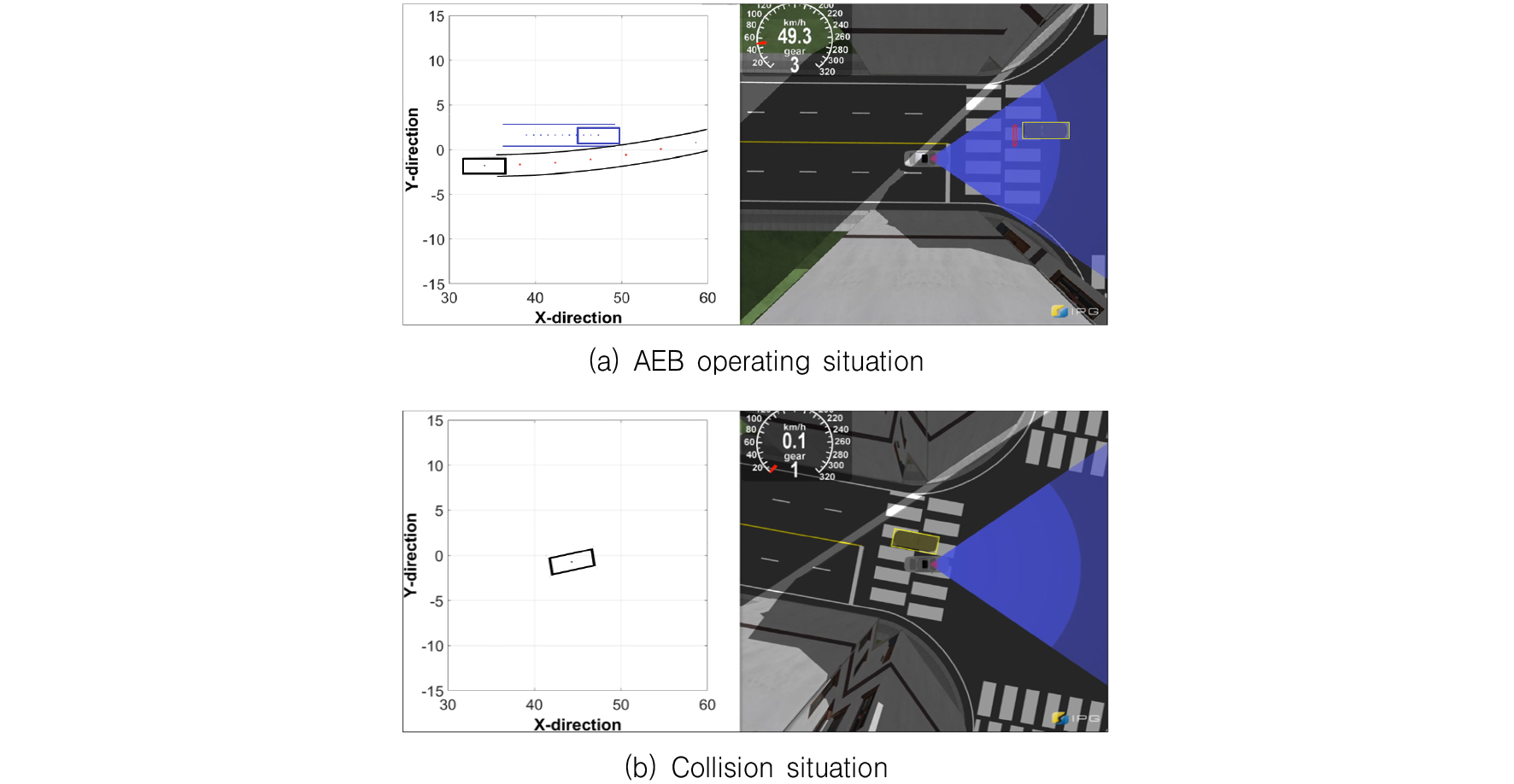
Table 9.
Collision according to velocity change in Left Turn/Opposite Direction-Straight Cross scenarios (sensor angles 70 degree, model B)
| 70° | Target vehicle velocity [km/h] | |||||
|
Ego vehicle velocity [km/h] | 10 | 20 | 30 | 40 | 50 | |
| 10 | - | - | - | - | - | |
| 20 | - | - | - | - | - | |
| 30 | - | - | - | - | - | |
| 40 | - | - | - | - | - | |
| 50 | - | - | - | - | - | |
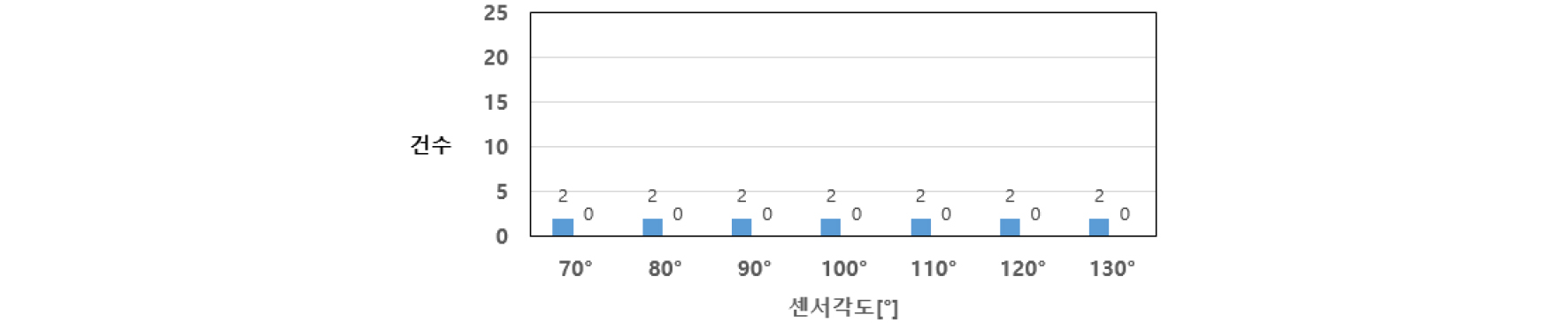
SC/RD-SC 시나리오에서 B모델을 적용하면 Fig. 14와 Table 10과 같이 70°에서 4건, 80°에서 2건, 90°이상의 각도에서는 모든 속도 케이스에서 충돌을 회피하는 것을 확인하였다. 70°에서 발생하는 4건의 사고의 경우, Fig. 14(a)와 같이 Ego 차량에 장착되어 있는 Camera 센서 영역 밖에 Target 차량이 있어 인식하지 못해 경로예측을 하지 못하고 Fig. 14(b)와 같이 Ego차량의 AEB 작동영역 안쪽으로 타겟차량이 진입하기 때문에 Fig. 14(c)와 같이 타겟차량 좌측면에 충돌하는 것을 확인하였다.
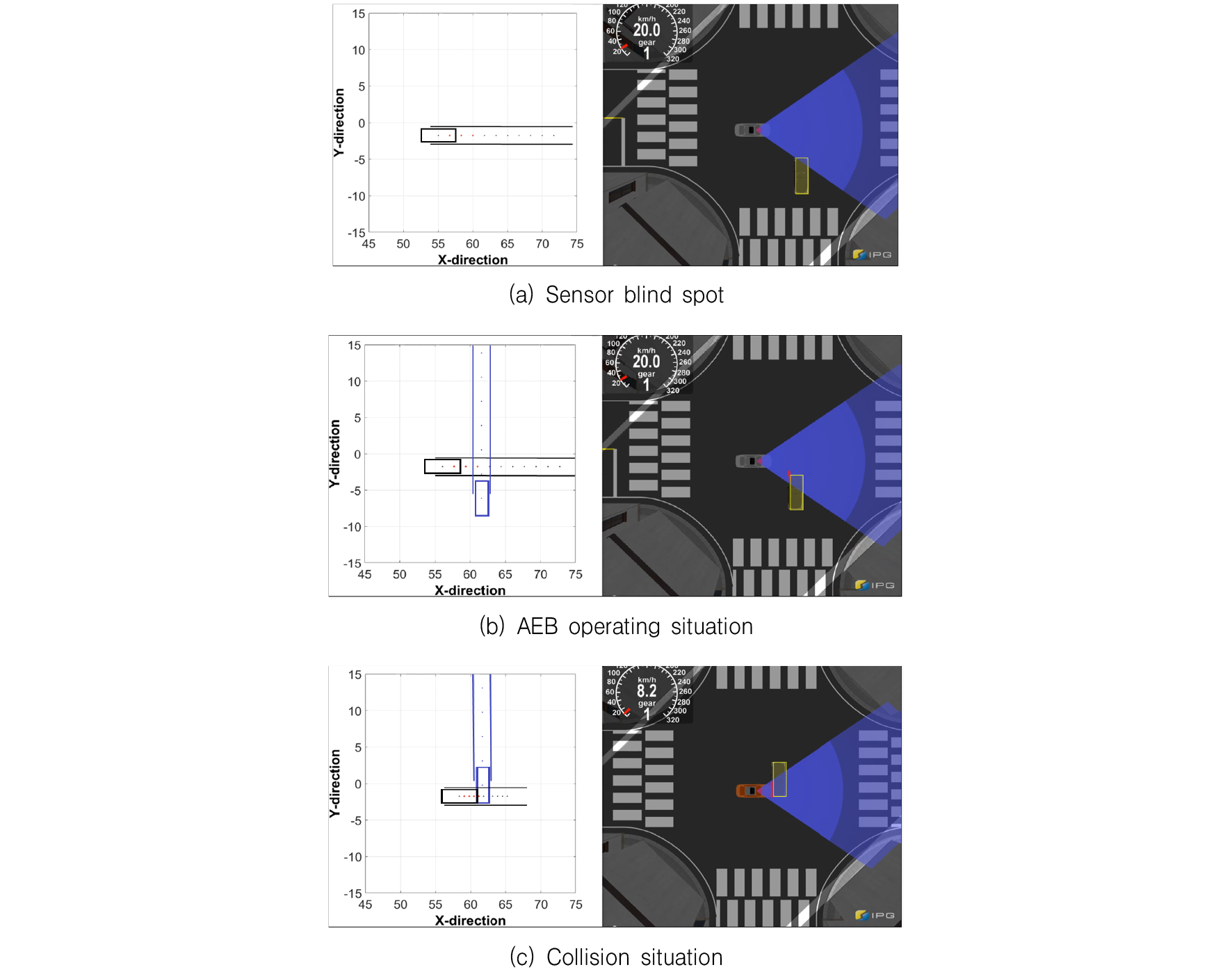
Table 10.
Collision according to velocity change in Straight Cross/Right Direction-Straight Cross scenarios (sensor angles 70 degree, model B)
| 70° | Target vehicle velocity [km/h] | |||||
|
Ego vehicle velocity [km/h] | 10 | 20 | 30 | 40 | 50 | |
| 10 | - | - | - | - | V | |
| 20 | - | - | - | - | V | |
| 30 | - | - | - | - | V | |
| 40 | - | - | - | - | V | |
| 50 | - | - | - | - | - | |
또한 80°에서 발생하는 2건의 사고의 경우도 마찬가지로 70°보다 넓은 영역을 보고 있어서 충돌 횟수가 줄었지만 여전히 남은 충돌 케이스의 경우 Camera 센서 영역 밖에 Target 차량이 있기 때문에 인식하지 못하고 충돌하는 것을 확인하였다.
교차로 LT/OD-SC, SC/RD-SC 시나리오에서 경로 예측모델을 이용하여 시뮬레이션을 수행을 수행하였다. 충돌이 발생하는 원인은 센서에서 타겟차량을 인식 했을 때, AEB가 작동하지만 제동거리가 충분하지 않아 충돌하는 케이스들이다. 센서 각도 90° 이상에서부터 모든 사고를 회피하고, 속도를 기준으로 보면 Target 차량의 속도 40km/h 이하일 때는 모든 충돌을 회피하는 것을 확인하였다. 이를 통해 교차로에서의 안전한 센서 영역은 최소 90° 이상이며, 40km/h이하의 주행속도일 때 안전할 것으로 판단된다.
6. 결 론
본 논문에서는 교차로 상황에서의 자율주행자동차의 주행 모델, 센서 각도 그리고 속도가 미치는 영향을 확인하기 위해 경로 예측 모델을 이용하여 자율주행자동차의 교차로 충돌 사고 시뮬레이션을 진행하였다. 해외의 NASS 데이터와 국내 보험사 데이터를 이용하여 한 차량 좌회전 시 반대편 방향에서 직진(Left Turn/Opposite Direction-Straight Cross) 시나리오와 한 차량 직진 주행 시 우측에서 직진(Straight Cross/Right Direction-Straight Cross) 시나리오를 도출하였다. 시뮬레이션은 CarMaker를 통해 교차로 환경을 구성하였고 Constant Velocity 모델과 Constant Turn Rate Velocity 모델을 기반으로 경로예측모델을 설계하였다.
자율주행기능은 AEB기능만을 이용하였고, AEB모델은 TTC(Time To Collision)을 기반으로 제동거리를 고려하여 설계하였다. 두 차량의 속도는 각각 10km/h~50km/h까지, 센서 각도는 70°~130°까지 10단위씩 증가시켜 가며 시뮬레이션을 진행하였다. 그 결과 경로 예측 모델을 이용한 경우, 센서 범위가 넓어질수록 사고를 방지하는 경향을 확인하였으며, 자기차량의 주행경로에 진입 시 제동 제어하는 모델에 비해 최대 48%의 사고를 줄일 수 있었다. 또한 한 차량 좌회전 시 반대편 방향에서 직진(Left Turn/Opposite Direction-Straight Cross), 한 차량 직진 주행 시 우측에서 직진(Straight Cross/Right Direction-Straight Cross) 두 시나리오에서 90°이상의 센서 각도를 가지면, 모든 사고를 회피하는 것을 확인하였으며, 두 차량의 속도 모두가 40km/h 이하에서 충돌을 회피하는 것을 확인할 수 있었다.
