

1. 서 론
2. AEB 시뮬레이션
2.1. 모델 구성
2.2. 결과 데이터
3. 충돌 시뮬레이션
3.1. 모델 구성
3.2. 결과 데이터
4. 머신 러닝 모델
4.1. 모델 구성
4.2. 머신 러닝 코드 구성
4.3. 결과 데이터
5. 결 론
1. 서 론
최근 자동차 산업에서는 차량의 안전성을 높이기 위한 ADAS(Advanced Driver Assistant System)의 기술적 발전이 급속도로 이루어지고 있다.(1) 특히, 자동 긴급 제동 장치(Automatic Emergency Braking, AEB)는 충돌을 예방하거나 충돌 시 충돌 속도를 낮춰주게 되면서 사고 충격을 완화하는 데 크게 기여하고 있다.(2) 이 시스템은 차량이 잠재적 충돌 상황을 감지할 때 자동으로 제동을 실행하여 사고의 심각성을 줄이는 역할을 한다.
승객 보호 관점에서 AEB 시스템의 효과를 극대화하기 위해서는 차량 내부 안전 장치의 적절한 작동이 필수적이다. 특히, 에어백은 승객의 상해 정도에 결정적인 영향을 주는 요소로 충돌 발생 시 적절한 시점에 전개되어야 승객을 보호하는 데 최적의 효과를 발휘할 수 있다. 따라서, AEB 작동 사고에서 에어백의 전개 시점을 최적화하는 것은 승객의 안전을 극대화하고, 심각한 부상을 방지하는 데 있어 중요한 부분이다. 본 연구에서는 AEB 시스템이 작동하는 교통사고 상황에서 차량 속도, 승객의 착좌 각도, 에어백 전개 시점 3가지의 변수가 승객 상해에 미치는 영향을 시뮬레이션을 통해 체계적으로 분석하였다.
기존 연구들에서도 AEB 시스템이 작동하는 사고에서 다양한 변수들에 따른 승객 상해 분석들이 진행 되어왔다.(3) 본 연구에서는 승객 상해 분석 후, 시뮬레이션 데이터를 기반으로 하여 상해 분석 특정 차량 속도와 승객 착좌 각도에 따라 승객 상해를 최소화할 수 있는 에어백의 최적 전개 시점을 예측하는 머신러닝 모델을 개발하였다.
이러한 머신러닝 모델을 활용하여 에어백의 전개 시점을 차량의 속도와 승객의 착좌 각도에 따라 유동적으로 조절함으로써 승객은 에어백으로부터 최대한의 보호를 받을 수 있으며, 이를 통해 교통사고 발생 시 승객 상해를 효과적으로 저감하는 것이 연구의 목표이다.
2. AEB 시뮬레이션
2.1. 모델 구성
본 연구의 첫 단계로, AEB가 장착된 차량의 동작을 분석하기 위한 시뮬레이션을 진행하였다. 이 시뮬레이션은 Prescan 소프트웨어를 사용하여 진행되었으며, 시나리오 구성은 Fig. 1과 같이 KNCAP의 사고예방안전성 평가 중 AEB 테스트 규정을 준수하여 구성하였다.(4,5)
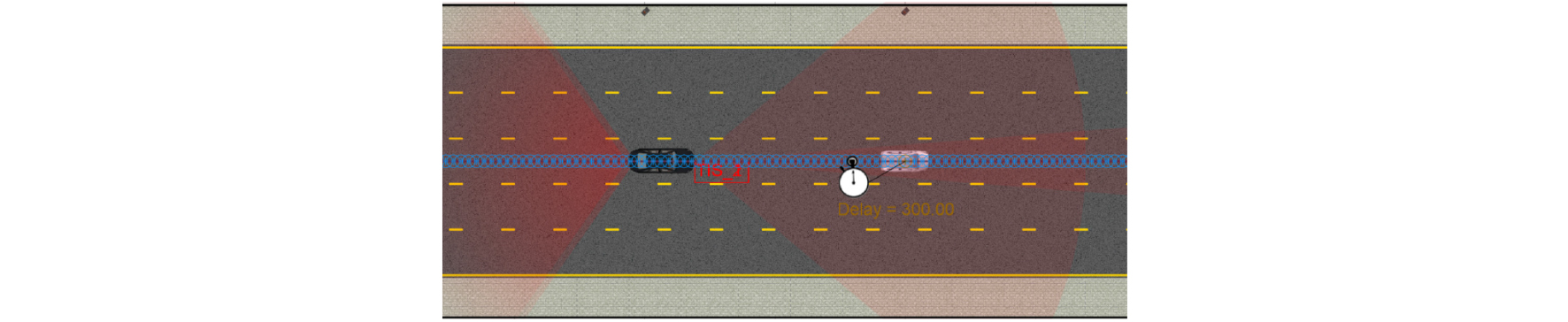
차량의 주행 속도는 KNCAP 테스트 규정과 다르게 다양한 속도 값의 데이터를 추출하기 위해서 120 km/h에서 시작하여 10 km/h 단위로 감소시키는 방식으로 조정하여 진행하였으며, 상대 차량의 경우에는 속도가 0 km/h로 초기 위치에 정차되어 있으며 주행 차량이 주행 중에 상대 차량과 충돌을 감지하면 AEB 시스템이 작동하도록 설정하였다. Fig. 2와 같이 Prescan에서 제공되는 Demo AEB 알고리즘을 수정한 알고리즘이 탑재되었으며,(6) 이 알고리즘은 TTC(Time To Collision)에 따라 자동으로 차량의 제동을 단계적으로 실행한다. TTC는 두 차량 사이의 거리를 상대 속도로 나눈 값으로, 충돌이 발생할 때까지 걸리는 시간을 의미하며, Table 1과 같이 TTC에 따라 감속량이 다르게 발생한다.(7)
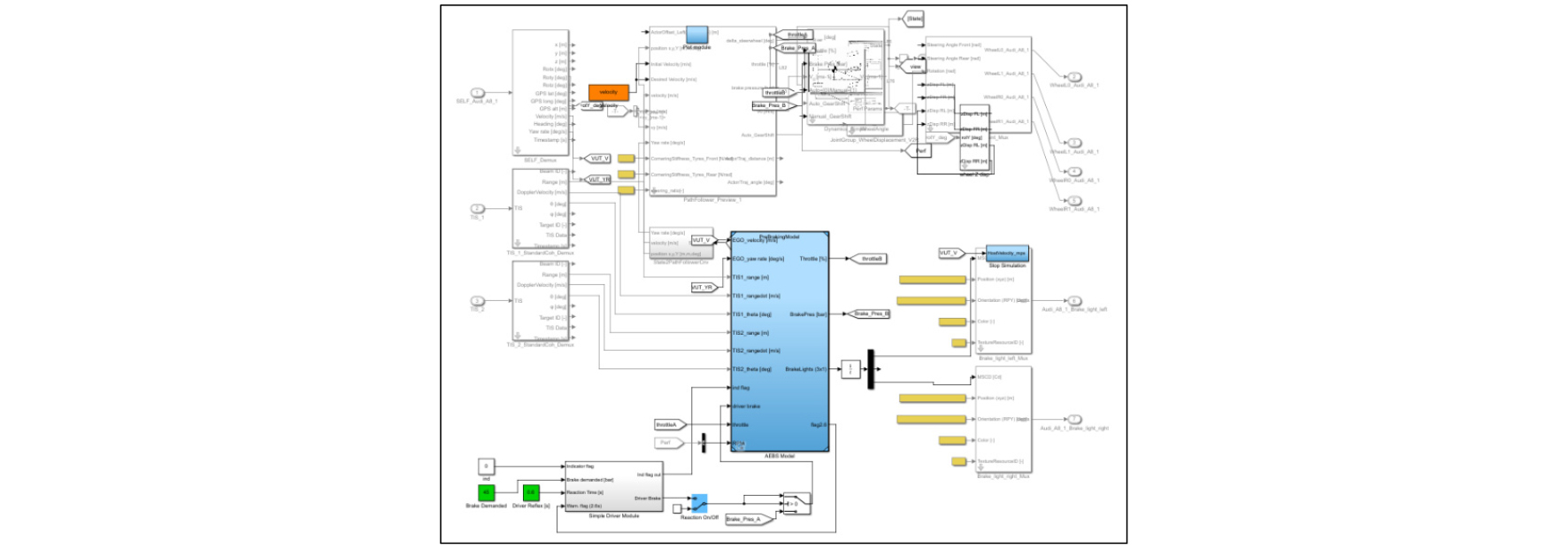
Table 1.
AEB Action
| TTC (sec) | AEB Operation |
| 2.6 | Warning |
| 1.6 | Partial Braking (40%) |
| 0.6 | Full Braking (100%) |
2.2. 결과 데이터
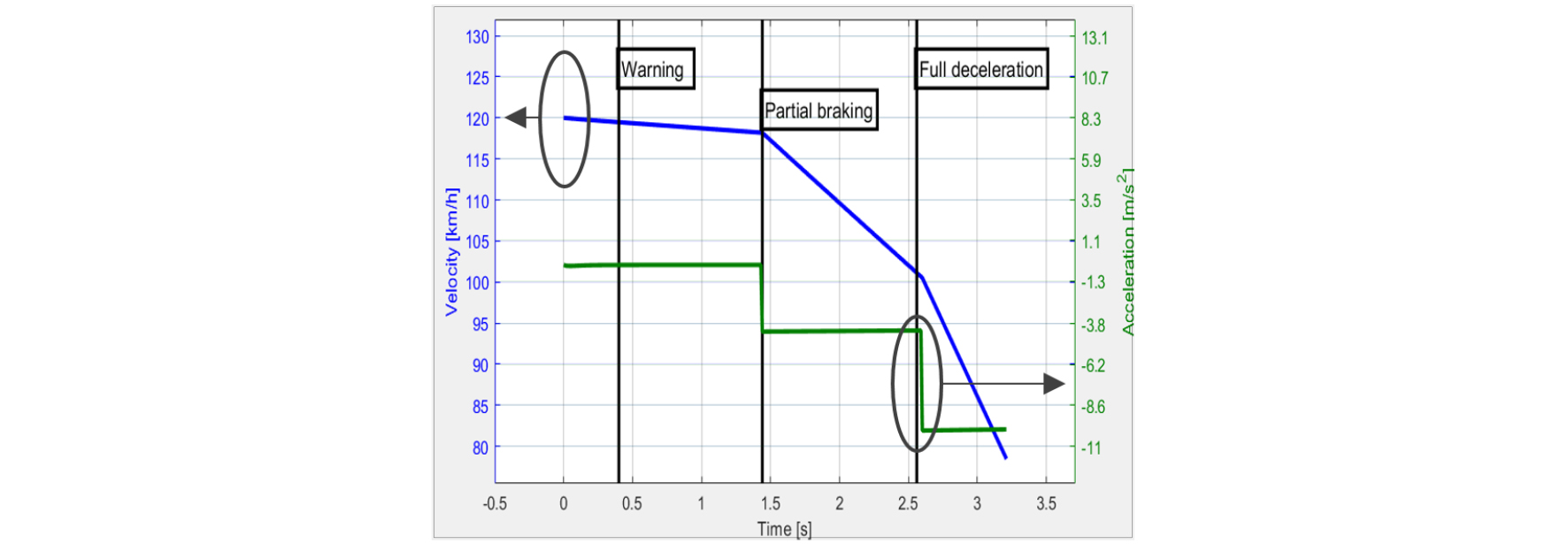
AEB 시뮬레이션을 통해 차량이 충돌을 인지하고 AEB 시스템이 작동하면서 변화하는 속도와 감속도 데이터를 Fig. 3과 같이 취득하였다. 해당 데이터는 120 km/h의 데이터로 120 km/h에서 시작하여 10 km/h 단위로 모든 데이터를 취득하였다. 이 데이터는 속도별로 어떻게 감속이 이루어졌는지를 보여준다.
또한, Table 2에는 각 속도별로 측정된 최종 충돌 속도를 기록하였으며, 60 km/h에서는 충돌 전 정차하는 것이 확인하여 더 이상 시뮬레이션을 진행하지 않았다. 이러한 충돌 속도와 감속도 데이터는 충돌 시뮬레이션의 입력 자료로 충돌전의 차량의 움직임을 표현하는데 활용이 가능하다.
3. 충돌 시뮬레이션
3.1. 모델 구성
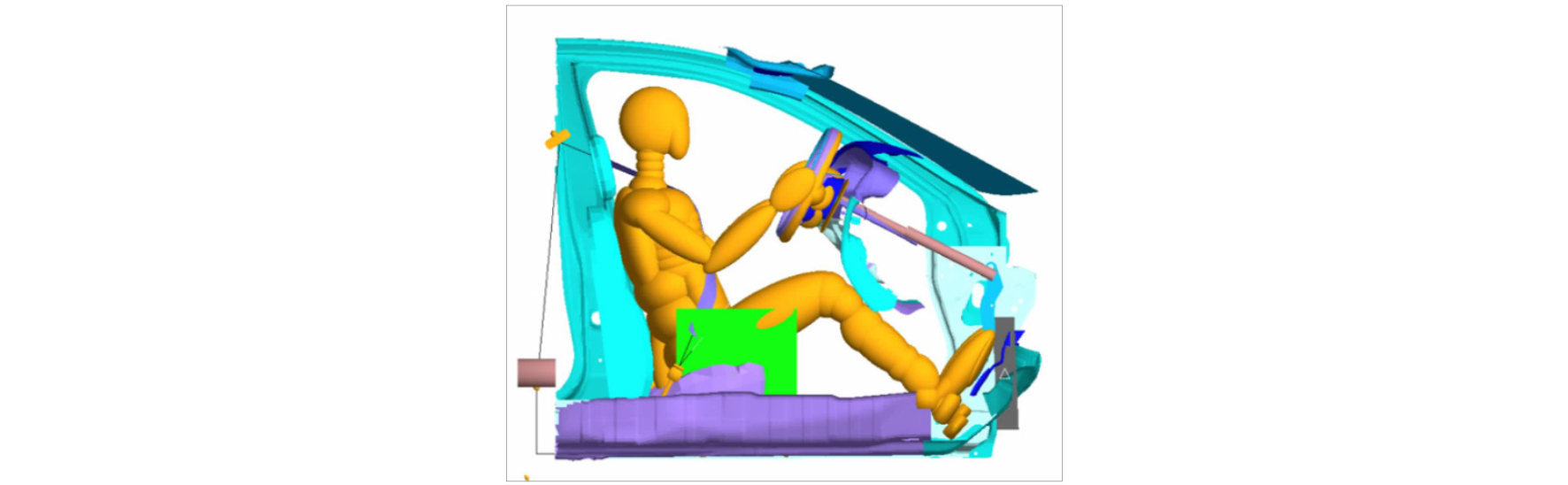
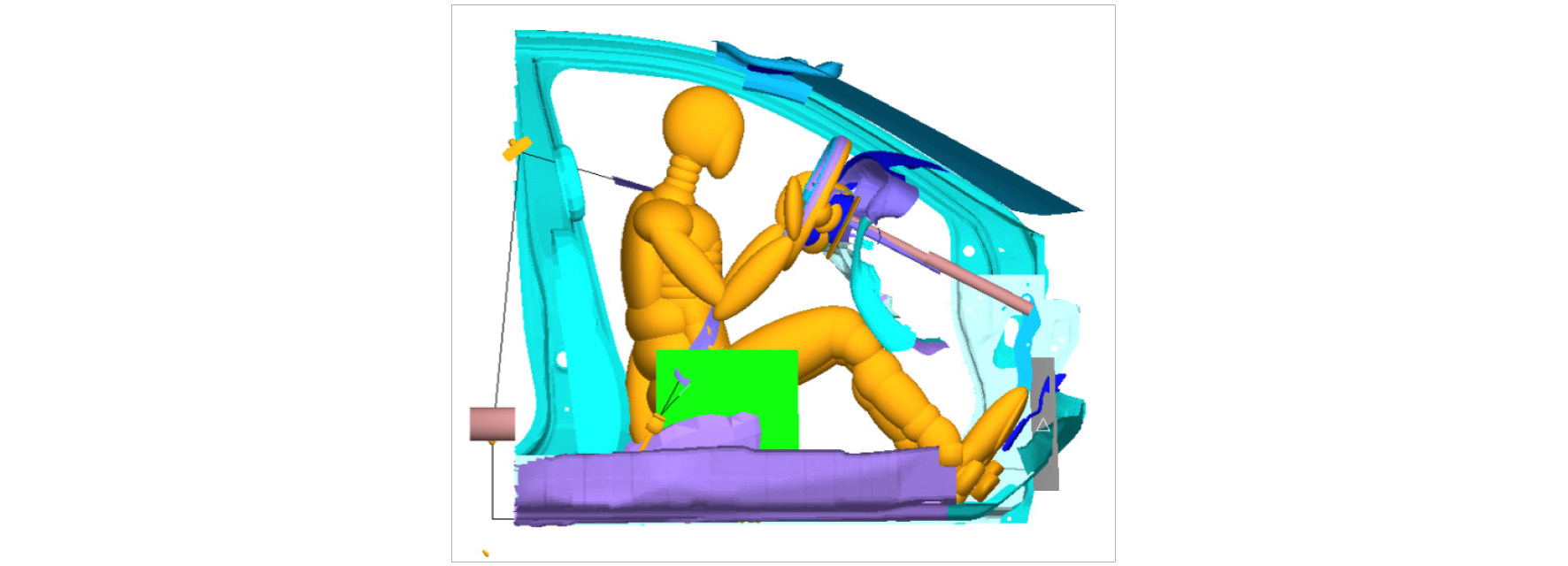
본 연구의 두 번째 단계로, 승객 상해 값을 얻기 위한 충돌 시뮬레이션을 진행하였다. 이 시뮬레이션을 위해 Madymo 소프트웨어를 사용하였으며, Dummy model은 Hybrid 50th Male을 사용하고, 해석 시간을 단축하기 위해 Fig. 4와 같이 슬레드 모델로 구성하였다.(3)
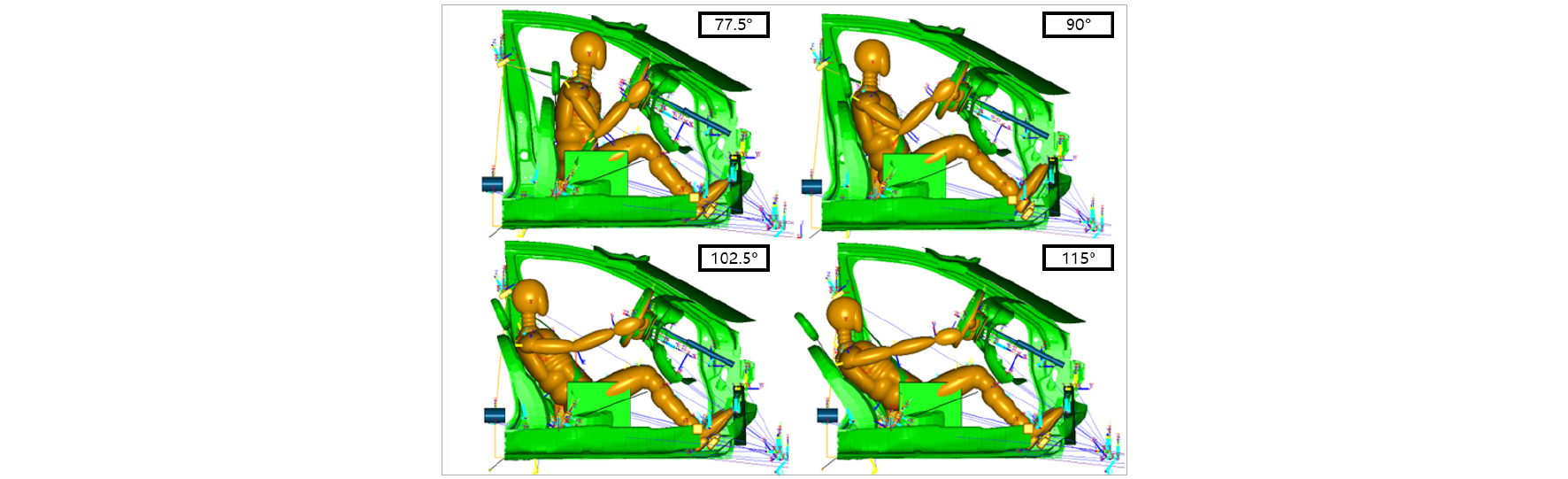
시뮬레이션 모델에 차량 속도(Vehicle speed), 승객의 착좌 각도(Seat angle), 에어백 전개 시점(Airbag TTF(Time To Fire)) 3가지의 변수를 반영하기 위해 Fig. 5와 같이 시트 각도별로 4가지 모델을 구성하였다. 왼쪽 위부터 77.5°, 90°, 102.5°, 115° 적용 모델로 12.5° 차이를 두고 모델링을 진행하였다.(8)
초기 차량 속도와 감속도는 Prescan에서 추출한 데이터를 활용하였으며, 에어백 전개시점은 0.00 sec부터 0.05 sec 까지 0.01 sec 간격을 두고 모델을 구성하였다. 결과적으로 Table 3과 같이 차량 속도 6개, 시트 각도 4개, 에어백 전개시점 6개 총 144개의 모델을 구성 후 시뮬레이션을 진행하였다.
Table 3.
Simulation variable
| Vehicle Speed (km/h) | Seat angle (degree) | Airbag TTF (sec) | |
| 1 | 120 | 77.5 | 0.00 |
| 2 | 110 | 90 | 0.01 |
| 3 | 100 | 102.5 | 0.02 |
| 4 | 90 | 115 | 0.03 |
| 5 | 80 | - | 0.04 |
| 6 | 70 | - | 0.05 |
3.2. 결과 데이터
시뮬레이션을 통해 얻은 데이터 중 본 연구에서는 에어백과 가장 밀접한 관련이 있는 상해값인 머리상해기준(HIC) 값만 추출하여 분석에 사용하였다.
더미 모델의 거동은 Fig. 6과 같이 충돌 전 AEB에 의한 감속도가 적용되기 때문에 모델이 차량 앞쪽으로 이동 후 충돌하는 것을 확인할 수 있다. 상해값의 경우에는 Fig. 7~10에서 보이는 것과 같이 차량 속도가 올라가면서 상해값은 점점 올라가지만 각 차량 속도별로 상해값이 가장 최저가 되는 에어백 전개 시점은 모두 다른 것을 확인할 수 있다.
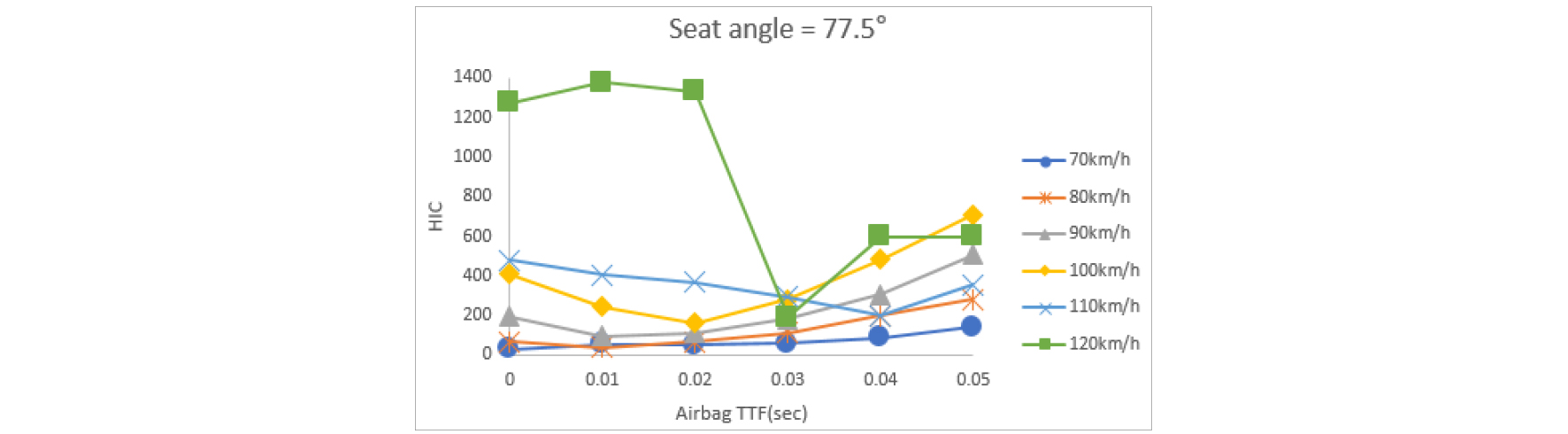
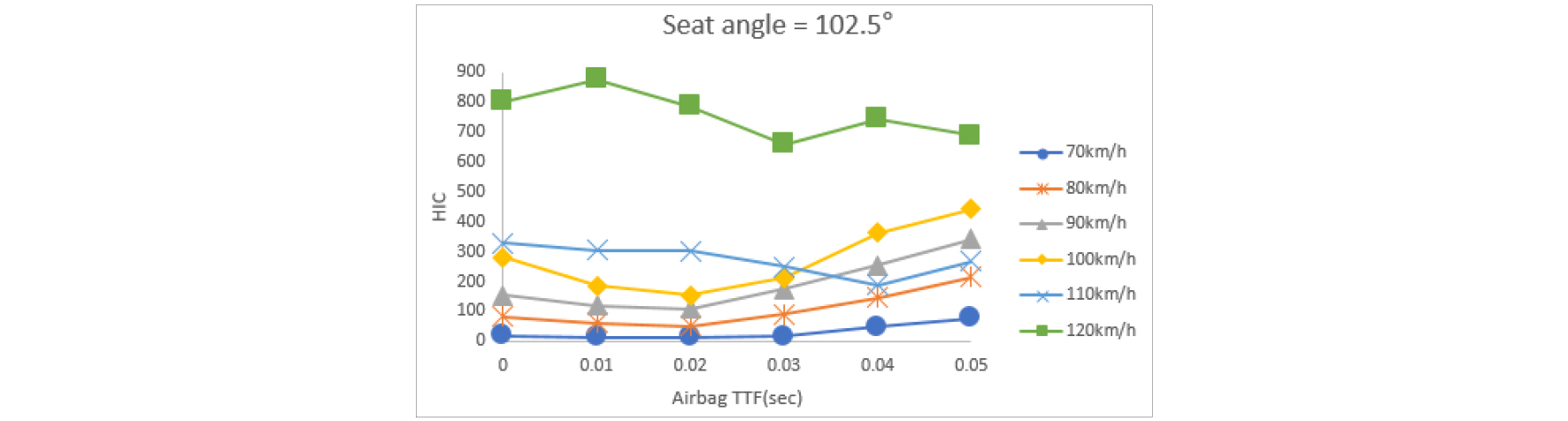
시트 각도 77.5°와 102.5°의 경우 Fig. 7과 Fig. 9을 통해 100 km/h 이하의 속도에서는 0.02 sec 부근에서 상해값이 가장 낮게 나오는 것을 확인할 수 있고, 110 km/h 이상의 속도에서는 0.03 sec~0.04 sec 부근에서 상해값이 낮게 나오는 것을 확인할 수 있다.
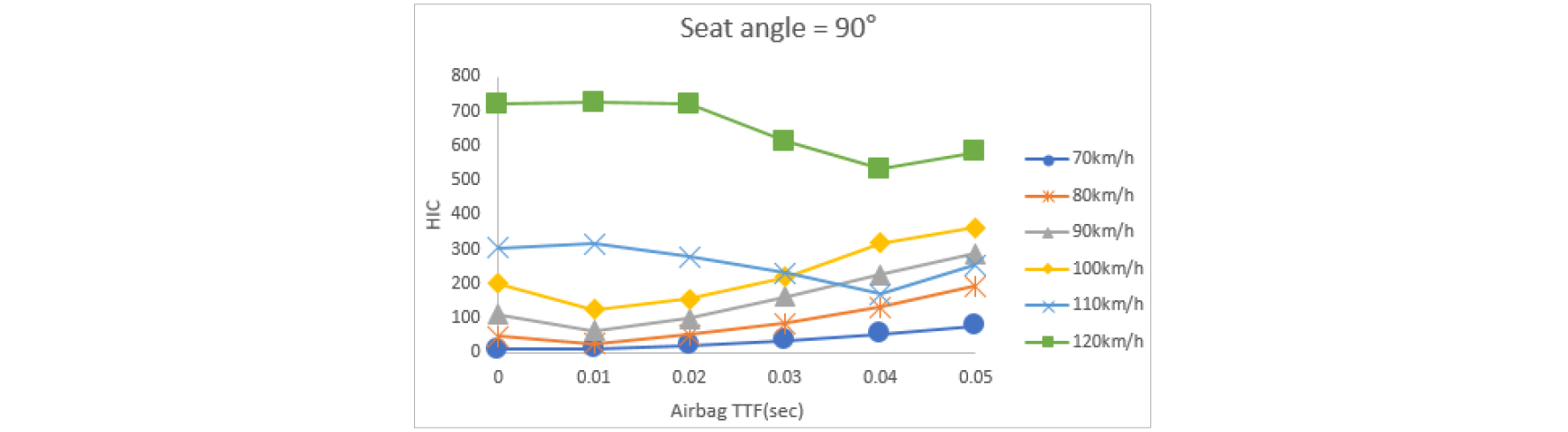
시트 각도 90°의 경우 Fig. 8을 통해 100 km/h 이하의 속도에서는 0.01 sec 부근에서 상해값이 가장 낮게 나오는 것을 확인할 수 있고, 110 km/h 이상의 속도에서는 0.04 sec 부근에서 상해값이 낮게 나오는 것을 확인할 수 있다.
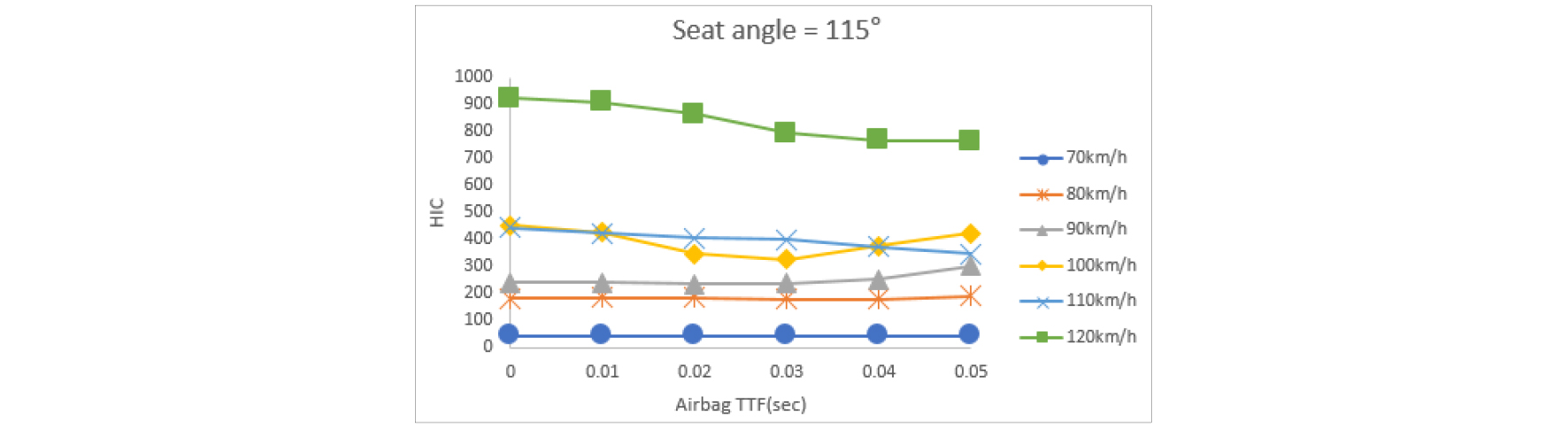
시트 각도 115°의 경우 Fig. 10을 통해 80 km/h 이하 속도에서는 에어백 전개 시점과 상관 없이 상해 값이 비슷하게 나오고, 90 km/h와 100 km/h에서는 0.03 sec 부근에서 상해값이 가장 낮게 나오는 것을 확인할 수 있다. 또한 110 km/h 이상의 속도에서는 0.05 sec 부근에서 상해값이 낮게 나오는 것을 확인할 수 있다.
4. 머신 러닝 모델
4.1. 모델 구성
본 연구의 마지막 단계로 충돌 시뮬레이션에서 취득한 144개의 결과 데이터를 활용하여 시뮬레이션을 수행하지 않은 특정 차량 속도와 착좌 각도에 대해 상해값을 최소화 하는 에어백의 전개시점을 예측하는 머신 러닝 모델을 구성하였다.
4.2. 머신 러닝 코드 구성
4.2.1. 변수 정의
본 연구에서는 특정 변수 차량 속도와 착좌 각도에 따라 상해값을 최소화하는 에어백 전개시점의 값을 예측하기 위한 데이터 분석 및 머신러닝 모델링을 수행하였다. 데이터는 차량 속도, 착좌 각도, 에어백 전개시점, 상해값 총 4 가지의 변수로 구성되어 있으며, 이들 데이터는 파이썬의 Pandas 라이브러리를 활용하여 DataFrame으로 변환하였다.(9)
데이터의 스케일링을 위해 StandardScaler가 적용되었는데, 이는 모델의 성능을 향상시키기 위해 필수적인 전처리 단계이며, 이 부분은 데이터 트레이닝 및 평가 과정을 효율적으로 만들어준다.(10)
4.2.1. 데이터 분류
모델 학습을 위해 데이터를 변수와 타겟 데이터로 분류하고 데이터셋은 훈련 데이터와 테스트 데이터로 분할하였다. 데이터 분할은 sklearn 라이브러리의 train_test_split 함수를 사용하여, 전체 데이터의 20%를 테스트 데이터로 분리하고, 이 과정에서 무작위성을 제어하기 위해 random_state 매개변수를 42로 설정하였다.(10)
4.2.1. 모델 설정 및 평가
해당 데이터에 대해 선형 회귀(Linear Regression), 결정 트리(Decision Tree), 그리고 랜덤 포레스트(Random Forest) 총 세 가지 머신러닝 모델 활용하여 비교 분석을 진행하였다.(11~13) 선형 회귀 모델은 데이터셋이 선형 관계를 가질 가능성을 염두해두고 선정하였으며, 결정 트리 모델은 데이터 내의 비선형적 관계에서 예측이 가능하기 때문에 선정하였으며, 이 과정에서 과적합을 방지하지 위해 트리의 깊이나 분할 기준을 정하여 모델을 구성하였다. 마지막으로 랜덤 포레스트 모델은 비선형 데이터의 고차원 모델을 예측하는데 사용될 수 있고, 각 변수의 중요도를 분석하는데 유용한 모델이기 때문에 선정하였다. 본 연구에서는 모델의 예측 성능을 비교하는 데 있어 랜덤 포레스트 모델이 가장 성능이 높을 것으로 판단하였다. 각 모델은 sklearn 라이브러리를 통해 구현되었으며, 모델의 성능 평가를 위해 Adjusted R2를 기준으로 선정하여 가장 최적의 모델을 사용한 결과를 출력하도록 하였다.
결과적으로 입력받은 차량 속도와 착좌 각도의 값에 대해 에어백 전개 시점의 범위를 변경하면서 상해값을 예측하는 과정이 진행되고, 이를 통해 상해치의 최소값을 제공하는 에어백 전개 시점의 최적값을 도출할 수 있었다.
4.3. 결과 데이터
예측 모델을 만들기 위해 작성한 코드를 구동한 결과 랜덤 포레스트(Random Forest) 모델에서 Adjusted R2 값이 0.872로 가장 높은값이 나왔으며, 이 수치는 예측 모델이 데이터에 잘 적합되어 있으며, 예측력이 높은 편에 속한다고 볼 수 있다.
이 모델을 활용하여 예측을 해 본 결과 Fig. 11, Fig. 12와 같이 특정 차량 속도(A), 착좌 각도(B)와 에어백 전개 시점 범위가 정해지면, 에어백 전개 시점(C), 상해값(D)에 해당하는 예측 그래프가 생성되고 이 그래프에서 가장 낮은 상해값을 갖는 에어백 전개 시점을 도출해주는 것을 확인할 수 있었다.
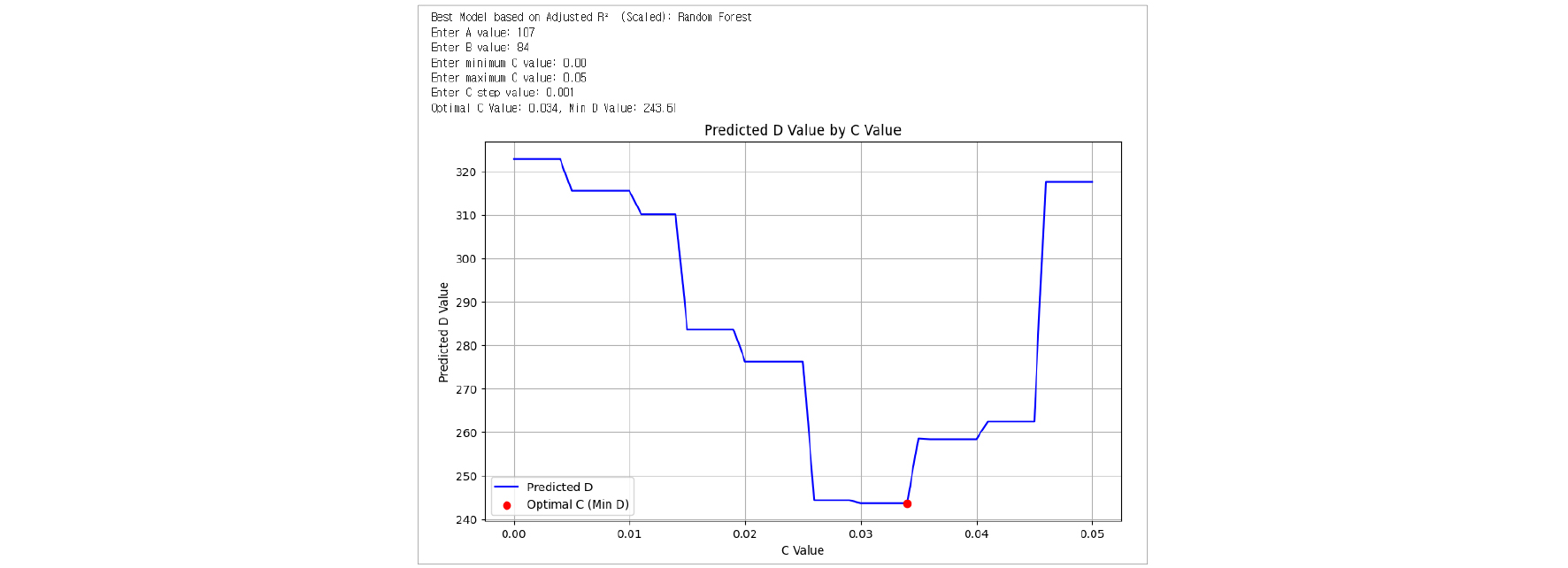
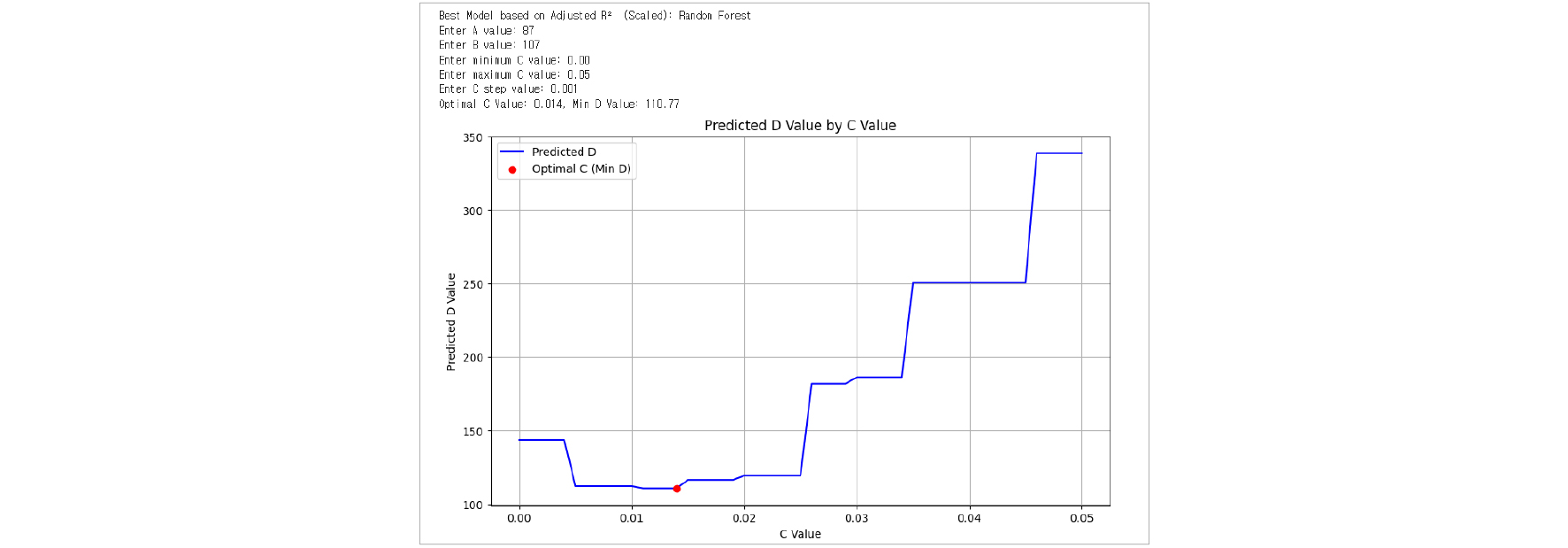
Fig. 11의 경우에는 A=107, B=84일 때, C=0.034에서 최소값 D=243.61을 가지는 것으로 예측되었고 Fig. 12의 경우에는 A=87, B=107일 때, C=0.014에서 최소값 D=110.77을 가지는 것으로 예측 되었는데, 이 값들은 Fig. 7~10과 비교해 보았을 때 시뮬레이션 데이터와 경향이 일치하는 것을 확인할 수 있었다.
5. 결 론
본 연구에서는 AEB가 작동되는 사고 상황에서 차량 속도, 승객의 착좌 각도, 에어백 전개 시점의 세 가지 변수가 HIC 값에 미치는 영향을 시뮬레이션을 통해 분석하였다. 이러한 분석을 바탕으로 변수와 HIC 값의 관계를 머신러닝을 통해 트레이닝 시킨 후 특정 차량 속도, 승객의 착좌 각도에서 에어백 전개 시점에 따른 HIC 값의 데이터를 예측하여 HIC를 최소화 할 수 있는 에어백 전개 시점을 도출하였다.
결과적으로, 본 연구에서 개발된 머신러닝을 활용한 예측 모델은 차량 속도와 승객 착좌 각도를 고려하여 에어백이 전개되어야 하는 최적의 시점을 정확히 예측함으로써, 실제 차량 안전 시스템의 설계와 구현을 하는데 있어, 하나의 방법론을 제시하였다. 또한 AEB 시스템과 에어백의 조화로운 작동은 승객 보호를 극대화할 수 있음을 시사하며, 이는 승객 안전을 향상시키는데 기여할 수 있다. 특히, 본 연구에서 사용된 머신러닝 기법은 다양한 안전 기술의 통합 및 최적화에 활용될 수 있을 것으로 기대된다.
향후 연구에서는 좀 더 다양한 변수와 결과 상해값들을 포함시키고, 더미 모델과 차량 모델을 변경하여 차량 및 승객 각각의 특성에 맞는 안전 장치 개발에 관한 연구가 필요하다고 판단된다.
