

1. 서 론
2. 연구 방법론
2.1. 반응표면설계
2.2. 중심합성설계
3. 실험 설계 및 데이터 수집
3.1. LiDAR 세척 변수 및 범위 선정
3.2. LiDAR 세척 실험 조건 설계
4. 분석결과
4.1. 모델링 결과
4.2. 최적화 결과 및 재현성 확인
5. 결 론
1. 서 론
자율주행차는 라이다, 레이더, 카메라 및 초음파 센서를 포함한 다양한 센서를 사용하여 운행 중 주변 환경의 데이터를 실시간으로 수집한다. 이는 차량이 적절히 주변 환경을 탐지하고 예기치 않은 장애물에 즉각적인 의사결정을 내릴 수 있도록 하는 가장 기본적인 과정이다. 센서의 성능과 정확도는 먼지, 비, 눈 등의 오염물질과 다양한 기타 환경 요인에 의해 영향을 받으며, 특히 오염물질에 노출된 센서의 성능 저하는 부정확한 데이터 인식을 통해 잠재적으로 위험한 상황을 초래할 수 있다. 따라서 자율주행차에 사용되는 센서의 성능 저하를 해결하기 위한 다양한 연구가 진행되어왔다.(1~3) Kenk et al.(2020)는 악천후 상황에서 차량을 감지하는 기술을 연구하였고,(4) Qian et al.(2018)은 단일 이미지에서 비를 제거하는 생성적 적대 신경망(Generative Adversarial Network, GAN)에 관한 연구를 수행하였으며,(5) Porav et al.(2019)은 이미지 복원을 위한 비이미지 생성 기술을 활용하여, 외부 환경 요인으로 인한 자율주행 차량의 센서 인식 저하 문제를 해결하고자 이미지 필터링 알고리즘에 중점을 둔 연구를 수행하였다.(6) 하지만 빛을 사용하는 LiDAR 센서의 성능확보를 위한 최적화된 세척 기술에 관한 연구는 미비한 실정이다. 이에 따라 눈, 먼지, 모래 및 진흙과 같은 환경 오염물질로 인한 자율주행 차량에 사용되는 센서의 성능 저하 상황에서 이를 효율적으로 세척하는 방안에 관한 연구가 필요하다.(7~10)
본 연구의 목표는 라이다 세척에 영향을 미치는 다양한 요인들의 최적 조건을 탐색하여, 효과적이고 효율적인 세척 방안을 도출하는 데 있다. 이를 위해, 라이다 세척의 영향 요인들을 정의하고 선정한 후, 실험계획에 따라 세척 요인들을 적절히 조합하여 세척률을 측정하였다. 이후, 측정된 데이터를 바탕으로 통계적 방법을 활용하여 분석하고, 최적의 세척 조건을 도출하는 일련의 과정을 Fig. 1에 제시된 실험계획법에 따라 진행하고자 한다.
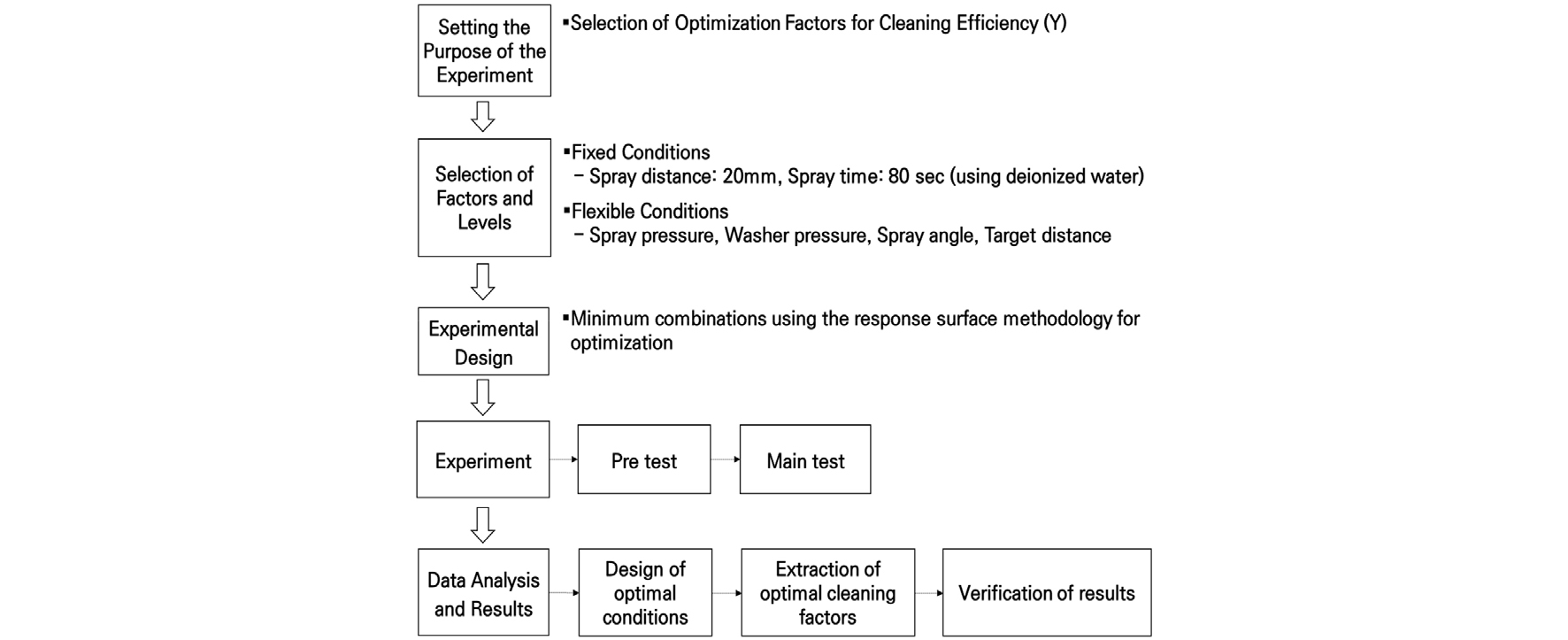
실험계획은 실험의 설계와 분석 방법을 포괄하는 전체적인 과정으로, 최소한의 실험으로 최대한의 정보를 얻어 실험 목적을 달성하는 것을 목표로 한다.(11) 실험계획법은 연구 목적에 부합하는 결과를 도출하기 위해 의미 있는 데이터를 적절히 분석하고 이를 기반으로 실험을 설계하는 일련의 과정을 포함한다. 이 방법론은 실험 목적의 명확한 설정, 실험에 사용될 변수와 조건의 신중한 선택, 그리고 계획된 방식에 따른 실험 수행을 강조한다. 또한 실험 결과로 얻은 반응 값을 분석하여 연구 목적에 부합하는 결론을 도출하고, 최소한의 실험 횟수로 최대한의 정보를 얻어 실험 효율성을 높이는 중요한 접근 방식이다. 이러한 방식은 실험의 타당성을 강화하고 데이터 분석을 통해 신뢰성 높은 결과를 도출하는 데 기여한다.(12)
2. 연구 방법론
2.1. 반응표면설계
반응표면설계(Response Surface Method, RSM)는 선정된 요인인 여러 개의 설명변수 가 복합적인 작용으로 반응변수에 어떤 영향을 미치는지 알 수 있으며, 반응의 변화가 이루는 반응표면에 대한 통계적 모형을 만들어 방정식으로 표현하여 관계를 설명할 수 있다. 실험 후 결과의 반응값을 지나는 선/면을 반응표면(Response Surface) 라고 하며, 실험 반응결과의 평면이나 곡면상에 있는 점들 중 표면상의 최대 또는 최소점을 찾아 최적 조건으로 선정이 가능하다.(13)
반응표면 설계는 주요 인자를 찾거나 반응 값을 최적화하기 위한 요인들을 탐색할 때 활용되는 실험설계 방법이다. 이 방법은 실험 조건의 변경이나 실험 횟수의 증가로 인해 시간과 비용이 많이 소요되는 환경에서 최소한의 실험으로 결과를 도출할 수 있다. 반응표면 실험설계에서 수행해야 하는 실험 횟수는 영향 요인의 개수, 각 요인의 수준 수, 그리고 반응표면 함수식에 따라 결정되며, 2차 회귀모형을 사용하는 반응표면 설계에서 가장 많이 사용되는 방법으로는 중심합성설계와 Box-Behnken 설계법이 있다. 본 연구에서는 면중심합성법을 활용하여 실험설계를 진행하였다.
2.2. 중심합성설계
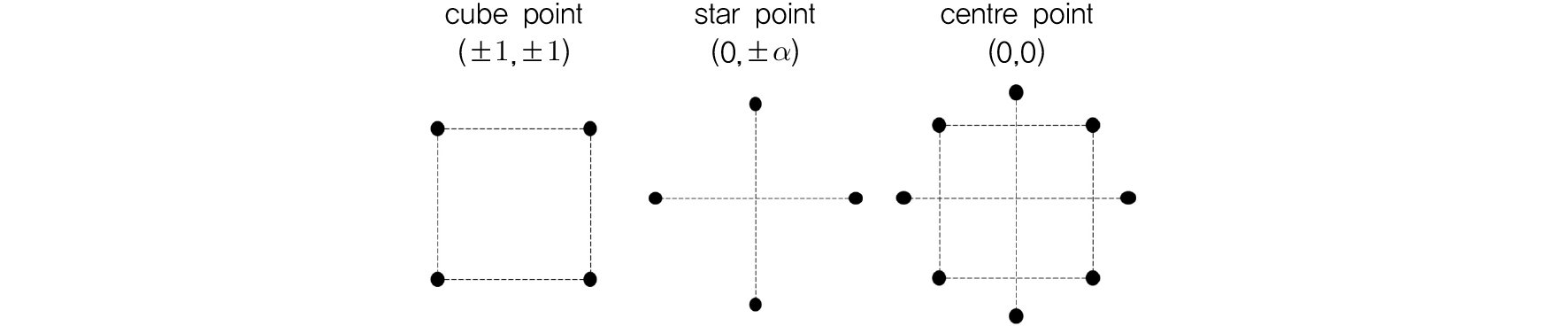
중심합성법(Central Composite Design, CCD)은 가상의 정육면체를 형성하여 꼭지점(Facotrial points), 중심점(Center points), 축점(Axial points)의 세 부분으로 구성되고 중심합성법의 축점은 Fig. 2와 같이 면 밖의 점인 시험조건 외의 값으로 구성된다.(14,15)
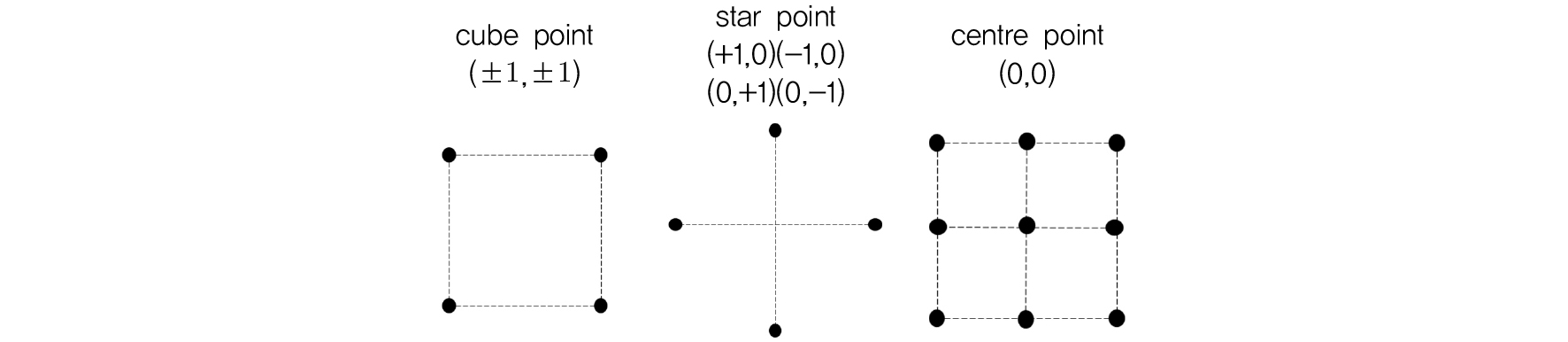
이를 면중심합성법(Face Centered-Central Composite Design, FCCD)을 통해 모든 축점을 시험조건 내에 나타나도록 요인 제약을 두어 축점을 면의 중심으로 설계하면 Fig. 3과 같이 나타난다. 본 연구에서는 축점을 면의 중심으로 설계하는 면중심합성법을 활용하여 물과 압력의 요인이 조건 내에서 최적화 조건을 탐색하도록 실험을 설계하였다.
FCCD의 면 중심에 축점이 있는 큐브 형태로 분석에 필요한 실험 샘플의 수는 ()로 표현될 수 있으며, 여기서 k는 요인의 수를 나타내고 n은 중심점의 수를 나타낸다. 반응함수는 k개의 독립요인들로 구축된 중회귀모형(multiple regression model)로 현실적으로 적용하기 쉽고 재현성이 높은 1차 또는 2차식을 가정하여 도출한다. 최적 조건의 결정은 반응 변수(Y)가 최대가 되는 값을 찾는 것으로, 실험 조건하에서 얻어진 데이터인 값들로 이루어진 최소제곱추정 함수식을 미분하여 정상점(stationary point)을 탐색하여 구해진다. 여기서 구해진 정상점은 적합된 2차 반응표면에서 가 최대가 되는 점, 최소가 되는 점, 또는 최대나 최소도 아닌 안부점(saddle point)일 수 있다. 따라서 본 연구에서는 관심 영역인 라이다 세척에 대해 영향 요인 수준에 따른 결과 값을 예측하고, 요인의 수준을 최적화하기 위해 요인에 따른 반응 값의 변화를 3차원 표면으로 시각화하여 최적점을 탐색하고자 한다. 이후 형성된 모델의 유의성을 확인한 후, 최적화된 조건으로 실제 실험을 수행하여 예상 반응 값과 실제 실험 결과 값을 비교함으로써 재현성을 확인한다.
3. 실험 설계 및 데이터 수집
3.1. LiDAR 세척 변수 및 범위 선정
3.1.1. 분사 시간(Spray Time(s))
LiDAR 세척을 위한 분사 시간이 증가함에 따라 세척률도 향상된다. 그러나 분사 시간이 길어질수록 세척에 소요되는 시간과 함께 라이다 송신기와 수신기의 차단 시간도 증가한다. 이에 따라 본 연구의 실험에서는 분사 시간을 0.5초에서 1.5초 범위로 제한하였다.
3.1.2. 분사 압력(Washer Pressure(bar))
LiDAR 세척을 위한 분사 압력은 주요 세척 요인이며 분사 압력에 따라 사용되는 물의 양은 양의 상관관계를 갖으며 세척률이 증가한다. 본 연구의 실험에서는 1에서 9bar 까지의 분사 압력 범위를 고려하였다.
3.1.3. 분사 각도(Spray Angle(°))
LiDAR 세척을 위한 분사 각도는 세척 노즐의 입구와 라이다 표면 사이의 각도로, 세척을 위한 노즐 길이에 따라 결정된다. 분사 각도는 시야 확보에 영향을 미칠 수 있으므로 20°에서 40° 범위로 제한하였다.
3.1.4. 분사 지점(Target Point(mm))
LiDAR 세척을 위한 분사 지점은 물의 주입 지점으로서 라이다의 청소 영역을 조절하는 중요한 역할을 한다. 분사 지점에 따라 시야 간섭과 노즐에서의 주입 거리 증가를 유발할 수 있기 때문에 본 연구에서는 분사 지점을 라이다 상단으로부터 5에서 15 mm 범위로 설정하였다.
3.2. LiDAR 세척 실험 조건 설계
본 실험에서 라이더 세척률을 최대로 하는 최적 조건을 탐색하기 위해 반응표면분석법(response surface methodology, RSM)을 사용하였다. 세척조건에 대한 실험계획은 면중심합성계획(face-central composite design, FCCD)을 사용하였다.
실험계획에서는 세척 공정에서 중요한 변수로 고려되는 인자들인 세척용 물 분사 시간, 분사 압력, 분사 각도, 그리고 분사 타겟 포인트를 3단계로 부호화(-1, 0, 1)하여 중심합성계획에 따라 Table 1과 같이 설정하였다. 이후, 중심합성설계에 따라 Table 2와 같이 총 30회의 세척 실험을 수행하여 데이터를 수집하였다.
Table 1.
Levels of variables in cleaning experiment
| Variable | Symbol | Range of levels (coded) | ||
| Low (-1) | Centre (0) | High (+1) | ||
| Spray Time (s) | A | 0.5 | 1 | 1.5 |
| Washer Pressure (bar) | B | 1 | 5 | 9 |
| Spray Angle (°) | C | 20 | 30 | 40 |
| Target Point (mm) | D | 5 | 10 | 15 |
Table 2.
Set points of the deposition parameters (factors), according to the central composite design. Each of the individual parameters was varied in five factor levels
4. 분석결과
4.1. 모델링 결과
면중심합성계획(face-central composite design, FCCD)에 따라 설계된 실험 데이터를 분석한 결과, 2차 다항식 모델이 가장 적합한 모델로 선택되었으며, 분사 횟수에 따른 모델의 통계량은 Table 3과 같이 나타났다. Adj. R-Squared 값은 모델의 설명력으로 모델이 데이터를 설명하는 비율을 표현하며 F-value(p-value)는 모델이 통계적으로 유의미하다는 것을 의미한다. 1~4회 분사했을 때의 네 가지 모델 모두 2차 다항 모델이 적합하고 유의한 결과가 나타났으며, 그 중, 2회 분했을 때 모델이 조절된 설명력(Adj. R-Squared)이 약 89%로 가장 높은 것으로 나타났다.
Table 3.
ANOVA results for the quadratic model of cleaning rate
| Model Response | R-Squared | Adj. R-Squared | F-value |
| First spray | 0.87 | 0.82 | 17.06*** |
| Second spray | 0.92 | 0.89 | 30.39*** |
| Third spray | 0.90 | 0.87 | 24.33*** |
| Fourth spray | 0.91 | 0.88 | 28.16*** |
4개 모형의 잔차 정규성 검증 결과 모형 모두 정규성을 만족하는 것을 Fig. 4와 같이 확인하였다.
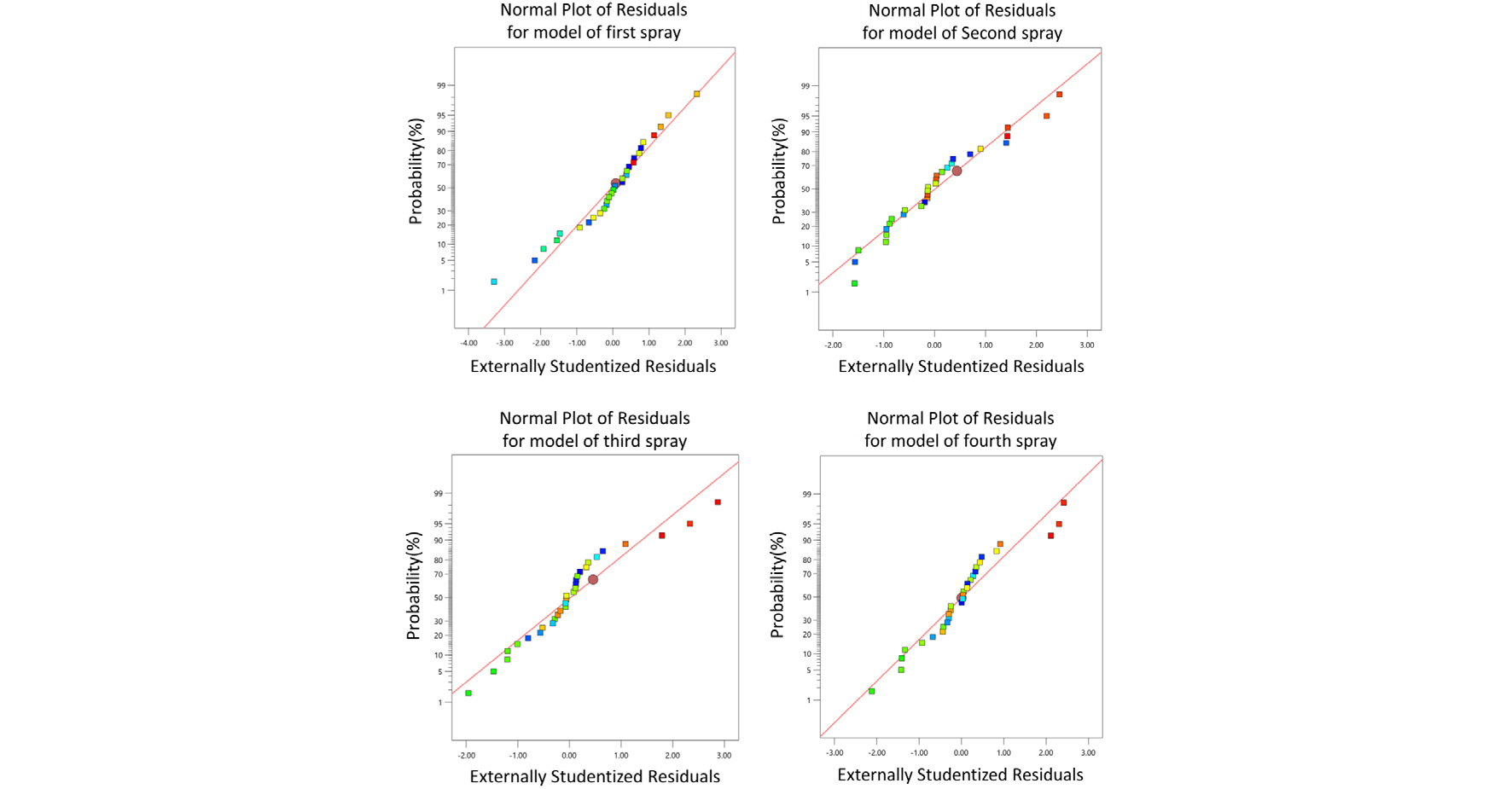
요인의 교차작용은 존재하지 않아 교차항을 제거하였다. 모든 모형 Lack of Fit은 0.05보다 큰 값으로 적합한 모델로 나타났으며, 2차 모형의 요인별 분산분석 결과는 Table 4와 같다.
Table 4.
ANOVA results for cleaning factors
1) 1회 분사: 분사시간과 분사압력의 1차 항은 유의수준 1%에서 유의성이 나타났고, 분사각도의 2차 항은 유의수준 10%에서 유의성이 나타남
2) 2회 분사: 분사시간과 분사압력의 1차 항은 유의수준 1%에서 유의성이 나타났고, 분사압력의 2차 항은 유의수준 5%에서 유의성이 나타남
3) 3회 분사: 분사시간과 분사압력의 1차 항은 유의수준 1%에서 유의성이 나타났고, 분사압력의 2차 항은 유의수준 1%에서 유의성이 나타남
4) 4회 분사: 분사시간과 분사압력의 1차 항은 유의수준 1%에서 유의성이 나타났고, 분사압력의 2차 항은 유의수준 1%에서 유의성이 나타남
2회 분사의 세척률 모형은 이차 모델이 가장 적합하였고, R-squared는 0.92, Adjusted R-squared는 0.89이며 모두 높은 설명력이 나타났다. 2회 분사 모델에서 p-value는 분사시간과 분사압력의 1차 항은 유의수준 1%에서 유의성이 나타났고, 분사압력의 2차 항은 유의수준 5%에서 유의성이 나타났다. 따라서 최소 제곱법을 기반으로 요인들의 회귀 계수를 추정한 결과 2차 다항식 방정식은 다음과 같이 표현된다.
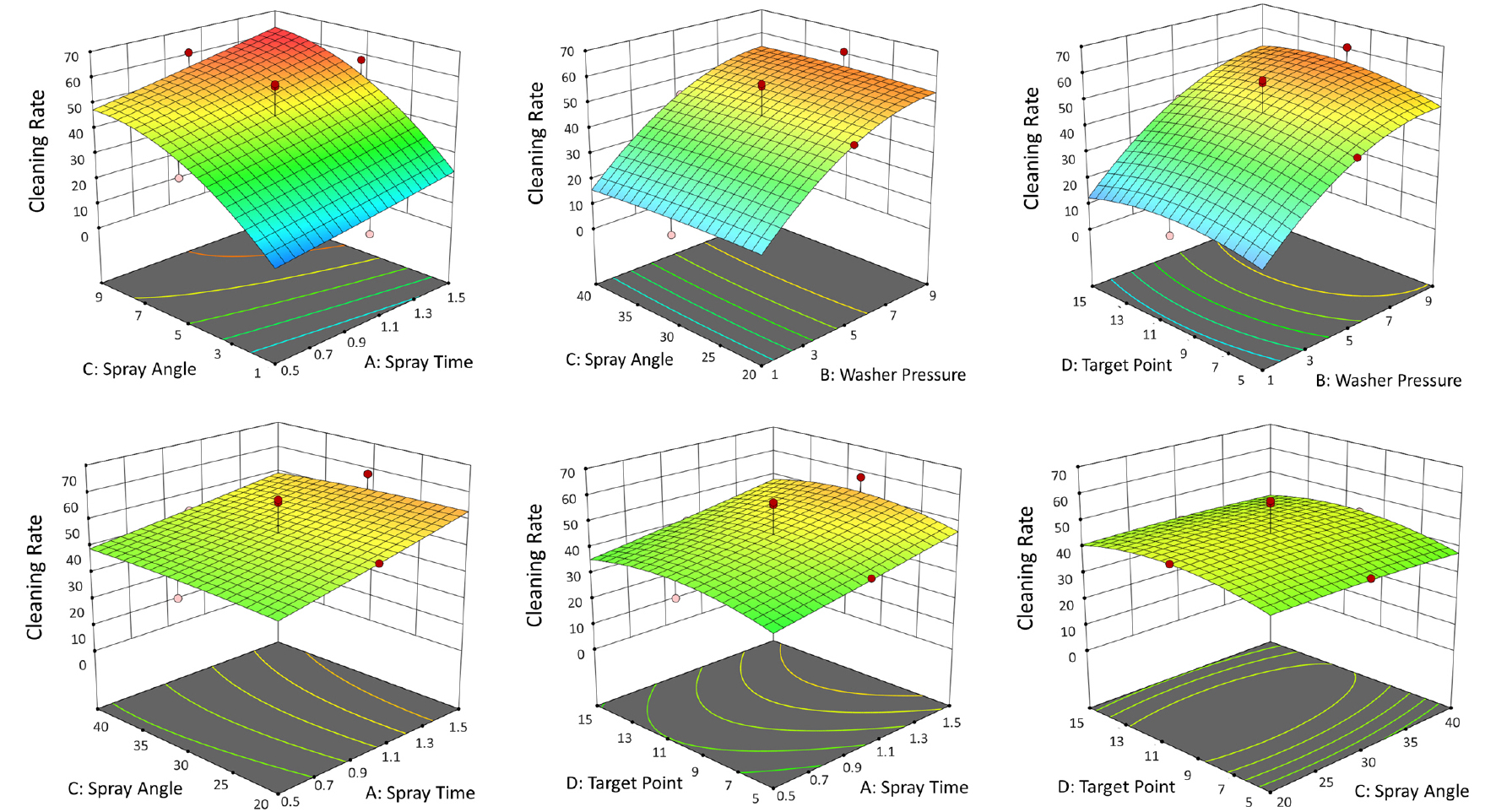
2회 분사의 세척률 모형의 2차 다항식 방정식을 기반으로 그려진 3차원 표면 및 2차원 등고선 그래프는 Fig. 5와 같다. 분사압력이 커질수록 세척률은 크게 높아지고 분사시간이 길어짐에 따라 증가하는 경향이 나타난다. 타겟포인트는 처음에는 높아지다가 타겟포인트 값이 커질수록 세척률이 낮아지는 결과가 나타났다. 반면 분사각도의 변화에서 거의 변하지 않은 채로 유지되는 것을 확인할 수 있다.
4.2. 최적화 결과 및 재현성 확인
실험을 통해 라이다 세척을 위한 4가지 요인의 최적 조건을 얻었다. 재현성 확인을 위해 아래 최적 조건으로 실험한 결과 2회 분사 모형이 가장 작은 차이(Difference)가 나타났으며, 이는 모델의 설명력이 가장 높은 것과 관계가 있다고 볼 수 있다.
Table 5.
Comparison of optimization results based on number of sprays
동일한 총 분사 시간 조건에서 분사 횟수와 각 분사 시간을 비교한 결과는 Table 6에 나타나 있다. 총 분사 시간이 1초일 때, 1초 동안 1회 분사하는 것보다 0.5초씩 2회 분사할 때 세척률이 더 높았다. 마찬가지로, 총 분사 시간이 1.5초일 때도 1.5초 동안 1회 분사하는 것보다 0.5초씩 3회 분사할 때 세척률이 더 높게 나타났다. 이는 압력이 동일한 조건에서 동일한 유량을 사용하더라도, 각 분사 시간을 짧게 하고 분사 횟수를 늘릴 때 세척률이 향상됨을 의미한다. 따라서 LiDAR의 높은 세척률을 위해서는 분사 시간을 늘리기보다 분사 횟수를 증가시키는 것이 더욱 효과적임을 알 수 있다.
Table 6.
Comparison of number of sprays according to total spray time
5. 결 론
본 연구에서는 자율주행 라이다 센서의 세척 최적화를 위해 분사 압력, 분사 시간, 분사 각도, 분사 지점 요인의 영향을 실험설계를 통해 규명하였으며, 그 결과 분사 압력과 분사 시간이 세척 성능에 가장 큰 영향을 미치는 것으로 나타났다. 물리적 한계와 분사 펌프 비용으로 인해 세척기 압력을 무한정 증가시킬 수 없으므로, 최적화 결과를 바탕으로 분사 압력을 7-8bar로 설정하는 것이 최적의 조건으로 제시되었다. 분사 시간은 물 소비량과 직접적인 연관이 있어 시간이 증가하면 더 많은 물이 필요하므로, 세척기 저장 탱크의 용량을 고려하여 분사 시간을 짧게 하면서 반복 분사하는 방법을 제안하였다. 추가적으로, 대상 지점이 약 10 mm에 위치할 때 분사 각도 20-30° 사이에서 가장 높은 세척률이 관찰되었다.
본 연구는 많은 수의 실험을 줄이면서 최적화 요인을 선정하기 위해 반응표면법의 중심합성설계법을 활용하였으며, 도출된 결과를 재검증하여 최적화 결과의 신뢰성을 확보하였다. 이러한 결과는 라이다 센서에 특화된 세척 최적화 요인을 제시함으로써 관련 기술의 개발, 적용 및 확산에 기여할 것으로 예상된다.
