

1. 서 론
현재 자율주행차량 기술은 국제자동차기술자협회(SAE)기준으로 4단계의 수준이 활발히 연구되고 있으며, 일반적으로 판매되는 차량에는 2~3단계가 적용되어 있다. 해당 차량들에 적용된 자율주행기술은 카메라, 라이다, 레이더 등의 센서들을 이용하여 주변 상황을 인지하고 필요한 제어를 입력하는 것이 보편적인 방식이다. 그러나 각각의 센서들이 사용하는 매질이 다르므로 Table 1과 같이 인지 범위와 날씨에 대한 취약성, 인지 해상도가 다양하다. 각각의 센서들이 단점을 가지고 있기 때문에 단일 센서를 사용하여 자율주행차량의 성공적인 수행을 기대할 수는 없다.(1) 이 때문에 단일 센서들의 취약점을 보완하고 성능을 높이기 위해 다년간 센서 융합이 활발히 연구되어왔다.
Table 1.
Sensor Comparison
Li(2)는 라이다 센서와 카메라 센서를 융합하여 GPS신호가 약한 실제 도심 환경에서 자율 주행 차량의 항법을 위한 운전 가능 영역 및 차선 인지 시스템을 연구하였다. 해당 연구에서는 빛의 반사율에 의지하는 라이다 센서의 취약성을 카메라의 시각 정보로 보완하였고, 물체와의 정확한 거리 정보를 얻거나 어두운 환경에서 정상적인 동작을 하는 데에 어려움을 가진 카메라를 라이다 센서로 상호 보완하였다.
Yi(3)는 자율주행차량의 물체 추적을 위해 라이다와 레이더, 카메라 센서를 융합하였다. 실제 도로 환경에서는 급작스러운 위험한 상황이 발생할 수 있고 충돌을 방지하기 위해선 사전 예방적인 주변 상황 인지가 필요하다. 이를 위해 해당 연구에서는 라이다와 카메라의 날씨에 대한 낮은 강건성을 해결하고자 레이더를 사용하여 물체 추적을 구현하였다.
상대 차량 인지 과정에서 단일 센서의 단점을 극복하기 위해 센서 융합에 관한 연구가 진행되어왔지만 센서를 사용한다는 점에서 한계점이 존재한다. 첫째, 자차량의 센서로 상대 차량의 상태를 알기 위해서는 센서의 값들을 이용해 추가적인 추정 알고리즘과 군집 알고리즘이 필요하다. 레이더의 경우 상대 차량의 속도를 측정할 수 있지만, 정확한 위치 정보를 얻을 수 없다는 점에서 추정 계산이 필요하다. 해당 과정은 실제 측정치를 사용하는 것이 아닌 추정치이므로 상대 차량의 상태는 4단계의 자율주행에 필요한 정확한 값을 기대하기 어렵다. 라이다 센서의 경우, 하나의 물체에서 나온 점들이 같은 물체로부터 출력되었다는 군집화가 필요하다. 둘째, 센서는 차량에 부착되어 있기 때문에 차량의 진동이 출력의 진동으로 직결된다. 차량이 고속으로 주행할수록 진동은 더 심해지므로 모든 센서에 동시에 진동이 가해짐에 따라 주변 차량과 장애물 인지에 악영향을 주게 된다.(4)
V2V는 앞서 기술한 단점을 해결하고 4단계 자율주행에 필요한 기술로 대두되고 있다. 통신 기술이 발전됨에 따라 대용량 트래픽 데이터를 고속으로 전송할 수 있는 시스템이 상용화되고 있다. V2V의 장점은 앞서 기술한 센서에 비해 더 넓은 영역의 신호를 통신할 수 있으며 장애물과 주변 환경에 제약을 받지 않는다. 또한 센서로부터 얻을 수 있는 정보에 비해 더욱 다양한 종류의 정보를 이용할 수 있으며 상대 차량의 상태를 추정 과정 없이 측정할 수 있기 때문에 주변 상황 인지를 통한 주행 판단에서 성능 향상을 보일 수 있다.
그러나 V2V는 무선 통신이 요구되는 만큼 신호가 전달될 때 딜레이가 존재하며 본 연구에서 이용한 통신은 입력 주기가 100ms이다. 또한 테스트 트랙이 아닌 일반 도심 환경에서는 전파 간섭 등의 외부 환경이 작용되기에 노이즈가 존재한다. 일반 센서에 비해 긴 입력 주기와 딜레이를 보완하여 도심 환경에서 강건함을 향상시키기 위하여 본 연구에서는 상대 차량의 상태를 정의한 후 확장칼만필터를 이용하여 차량 상태를 추정하였다.
2. 실험 환경
본 연구에서는 현대자동차의 대형 전기 버스인 일렉시티를 자차량과 상대 차량으로 실험을 진행하였다. 각 차량의 구성은 동일하게 GPS와 ROS 기반 산업용 PC, CAN, V2V On-Board Unit(OBU)로 구성되어 있다. GPS는 OXTS 사의 Real Time Kinematic(RTK) GPS인 RT3003을 사용하여 차량 후륜 중심축의 위치를 출력하도록 설정하였다. 또한 휠 속도 등의 샤시 정보를 차량 내부의 CAN 인터페이스를 통해 PC로 전달된다. PC로 입력된 GPS 정보와 샤시 정보는 이후에 OBU를 통해 SAE J2735에 정의된 기본 안전 메시지(BSM) 형태로 다른 차량에 송신된다.(5) 차량의 전체 센서와 통신 인터페이스를 Fig. 1에 도식하였다. 각 차량의 OBU는 WAVE와 LTE를 이용하여 양방향으로 V2V 통신을 수행한다. 두 가지 방식 중, 차량 사이의 거리가 가까울 경우 IEEE 802.11p WAVE 표준에 따라 차량의 정보를 OBU를 통해 송/수신하고 PC와 이더넷으로 연결되어 통신을 진행하게 된다.
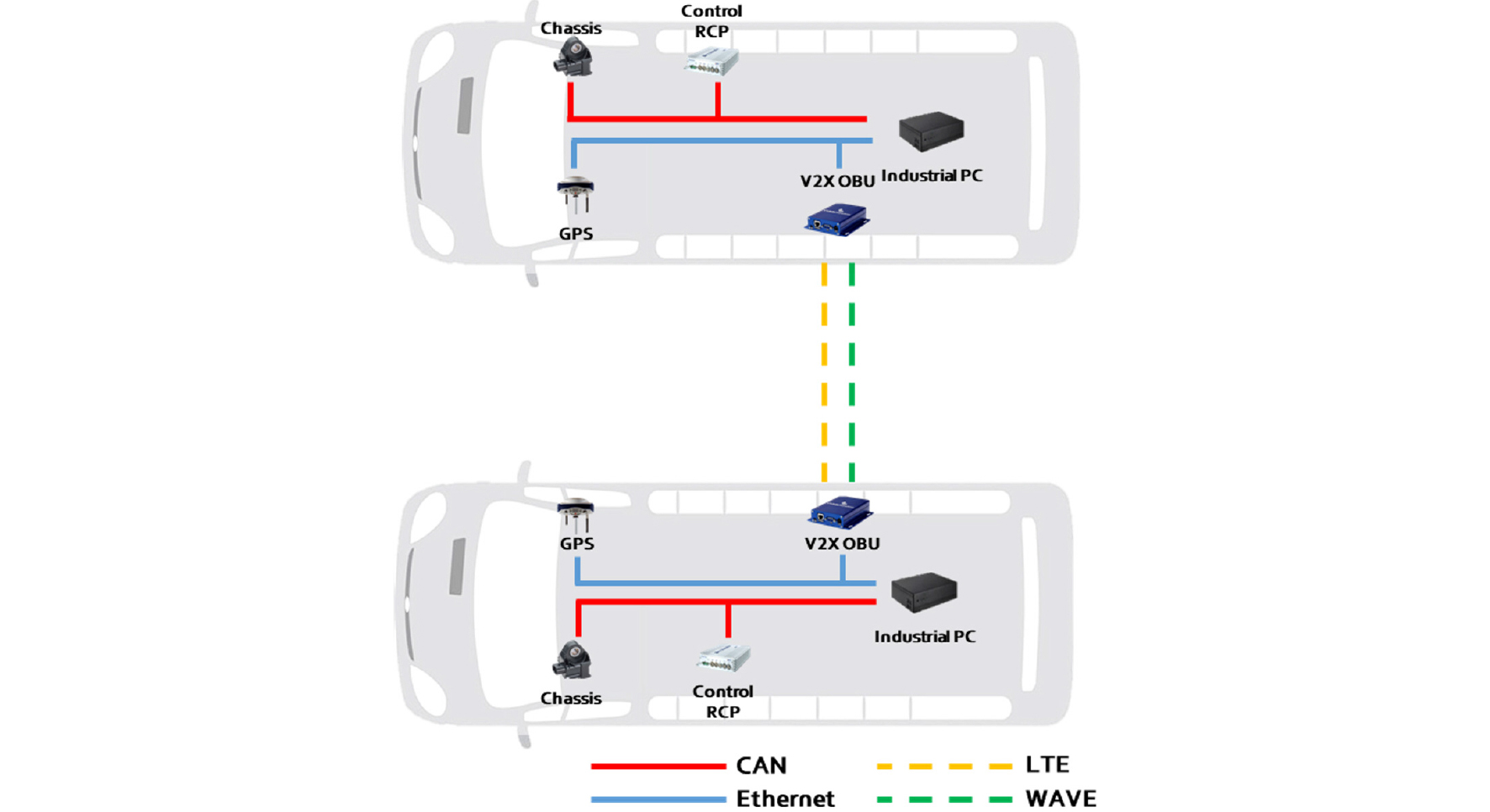
WAVE가 근거리 통신으로서 큰 유효성을 가지기 때문에 차량 간의 거리가 늘어나 통신이 미약해지면 LTE 방식으로 통신하도록 설계되어 있다.
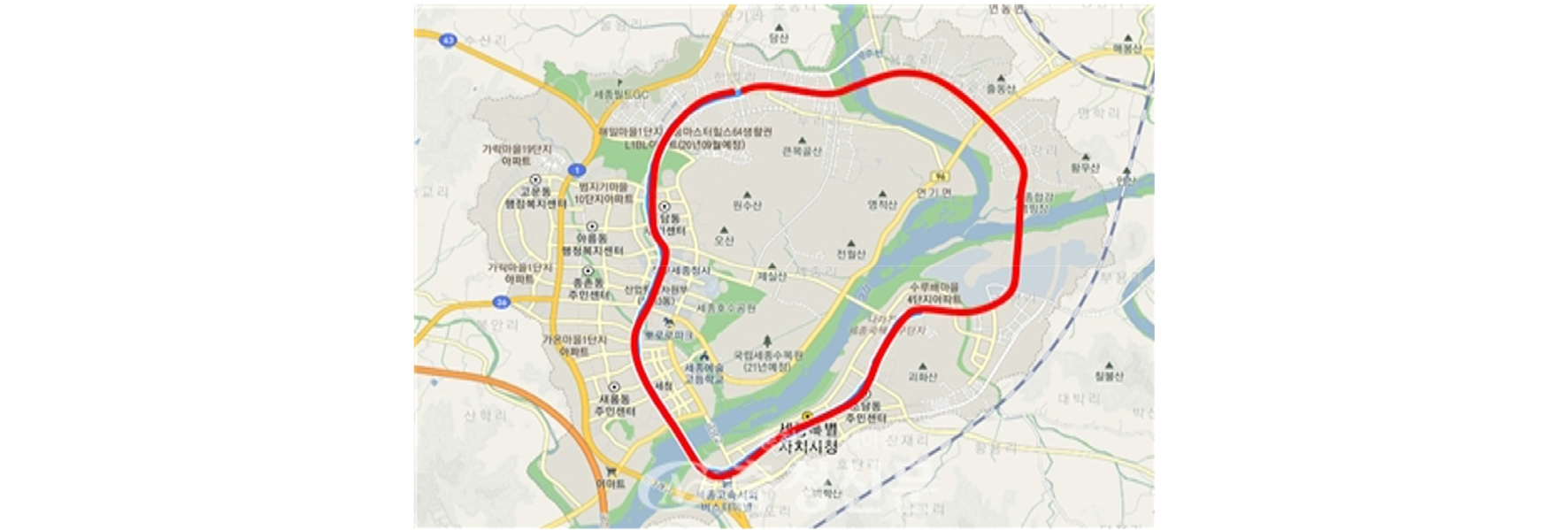
본 연구의 실험으로 차량 주행이 이루어진 곳은 세종특별자치시 간선급행버스 체계(BRT) 노선이다. 상대차량이 노선을 따라 주행하면 상대차량의 V2V 정보를 받는 자차량이 후방에서 추종하는 상황으로 진행하였다.
3. V2V를 이용한 상대 차량 상태 추정
기존 센서에 의존한 상대 차량 인지는 상대 차량에 대한 측정값을 계산하는 추가적인 알고리즘이 필요하기 때문에 오차를 내포한다. 반면, V2V 신호를 이용한다면 상대 차량의 정보를 추가적인 계산을 사용하지 않고도 알 수 있다는 장점이 있다. 그러나 WAVE와 LTE 무선 통신을 이용하기 때문에 기존 센서에 비해 입력 신호의 주기가 느리며 입력 딜레이가 존재한다. 본 실험에서는 해당 노이즈를 제거하고 상대 차량 상태를 보정하기 위해 확장칼만필터(EKF)를 이용하여 상대 차량의 상태를 추정하였다. 확장칼만필터는 잡음을 내포하는 측정치로부터 선형 모델을 이용한 칼만 필터를 확장한 것으로, 비선형 모델을 따르는 상태를 process update과 measurement update의 단계로 추정한다.(6)
추정하고자 하는 차량의 상태 x와 사용자 입력 u 다음과 같다.
x=[pxpyψ]T
u=[vγ]T
px : x-asis position in global UTM coordinate
py : x-axis position in global UTM coordinate
ψ : heading angle in global UTM coordinate
v : longitudinal velocity in local vehicle coordinate
γ : yaw rate of ego vehicle
차량 상태의 요소들은 모두 WGS84 타원체를 사용하는 UTM 좌표계를 기준으로 설정하였다. 사용자 입력은 상대 차량의 로컬 좌표계에서 종방향에 해당하는 속력과 상대차량의 요 레이트로 이루어진다.
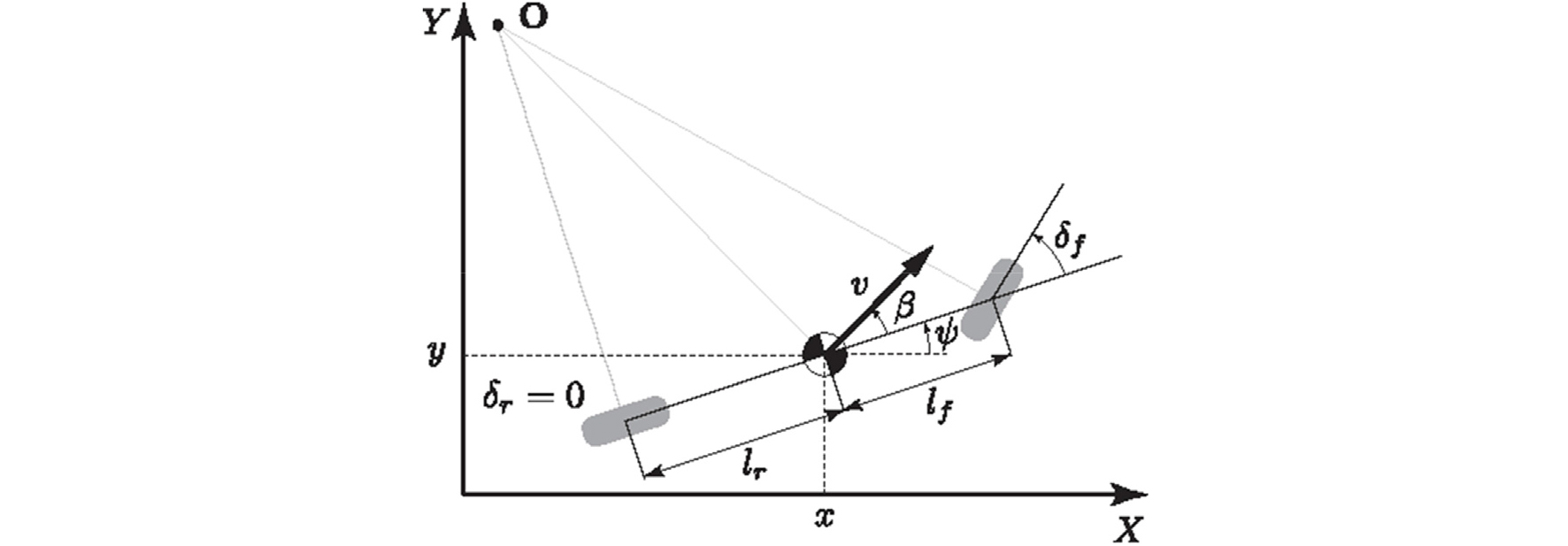
첫째로, point mass 모델을 이용하여 k-1번째 추정치로부터 k번째에 예상되는 측정값을 구하는 process update 과정이 진행된다. 차량의 거동을 표현하는 방식 중 가장 대표적인 모델은 Fig. 3과 같이 차량의 움직임에 힘을 고려하지 않고 운동학적으로 모델링한 2D bicycle model이다. 간단한 수식을 통해 차량의 움직임을 나타낼 수 있다는 장점이 있으며, 선회 반경이 작은 상황에서는 슬립 각 β를 0으로 둘 수 있다.(7)β를 0으로 설정하게 된다면 2D bicycle model은 point mass model과 동일 해지며 본 실험이 이루어진 세종시 BRT노선은 선회반경이 큰 구간이 없으므로 슬립 각을 0으로 설정하여 point mass model로 진행하였다. 그에 따른 process update는 식 (1)과 식 (2)와 같다. k번째 상태 x의 예측값 는 이전 시간의 추정치와 사용자 입력에 대한 비선형 함수의 결과값이다. 비선형 모델을 이용하는 EKF는 모델의 Jacobian을 이용하여 공분산의 예측값을 식 (2)와 같이 도출하며 process noise Q를 아래와 같이 설정하였다.
다음으로 measurement update는 식 (3)과 같다. k번째 V2V 정보를 measurement로 이용하여 process update과정에서 얻은 예측값을 보정한다. 공분산에 대한 measurement update를 수행할 때, 칼만 이득 Kk가 항상 최적값이라는 보장이 없으므로 Joseph 형식을 이용하여 보다 안정적으로 공분산을 보정하였다.(8)
4. 실험 결과 및 분석
실험 상황은 자차량이 상대 차량의 후방에서 추종하는 상황이다. 상대 차량의 V2V 정보에서 얻은 상대 차량의 상태와 이를 사용한 추정 상태, 그리고 입력 측정치인 V2V 정보값을 cut-off 주파수가 20Hz인 저주파 통과 필터로 필터링한 값을 자차량의 좌표계에서 비교하였다. 시간에 따른 상태의 그래프는 Fig. 4와 같다. WAVE와 LTE통신의 지연과 낮은 주파수로 인한 입력 V2V 신호의 불안정한 진동이 확인되었다. 자차량 좌표계의 종방향 위치의 경우, 약 10m의 이상치가 발생하였다. 자차량이 상대차량을 종방향으로 추종하는 실험 환경으로 인해 횡방향 거리 결과값의 스케일이 종방향의 결과값에 비해 작았다. 이를 3에서 기술한 파라미터로 설정된 확장칼만필터를 이용하여 추정한 결과, V2V 신호로부터 얻은 상태 정보의 진동이 줄어드는 결과를 얻을 수 있었다. 또한 V2V 신호는 상대차량의 거리에 따라 노이즈의 정도가 큰 차이가 있고 유사한 거리 내에서도 노이즈의 정도에 무작위성이 있어 필터링된 신호가 노이즈가 존재하는 입력 신호를 따라가는 경향이 존재함을 보인다. 그러나 확장칼만필터는 입력값에만 의존하는 저주파 통과 필터와 달리 모델을 통해 이전 상태로부터 얻은 예측값과 측정치의 공분산을 이용하기 때문에 노이즈 제거에 우수성을 보인다.
5. 결 론
본 연구에서는 V2V 통신으로 얻은 정보를 이용하여 상대 차량의 상태를 추정하는 알고리즘을 구현하였다. V2V 통신을 통해 얻은 정보는 로컬 센서의 인지 범위보다 넓었으며 차량 상태를 알기 위한 추가적인 계산이 불필요하다는 장점을 가진다. 그러나 실제 도심환경에서 진행된 실험으로 인해 WAVE 통신과 LTE 통신에 의한 입력 지연과 신호의 진동이 발생하였고 연속적인 정보의 신뢰성이 저하됨을 확인할 수 있었다. 이를 확장칼만필터를 이용한 추정을 통해 입력 신호에 대한 강건함을 높여 실제 도심 환경에서 효과를 얻을 수 있음을 확인 하였다. 해당 연구로 얻은 알고리즘을 이용하여 곡선 터널과 같이 로컬 센서로는 상대 차량을 미리 인지하기 어려운 환경에서 상대 차량의 상태를 얻고 자차량의 거동 제어에 V2V정보를 사용할 것이다. 해당 연구 결과로 입력 V2V 신호와 추정 신호만을 비교하였으나, 각 차량의 RTK GPS에서 얻은 정보를 기준 정보로 이용하여 상대 차량의 실제 위치와의 비교가 필요하다. 이를 위해선 상대 차량의 PC와 자차량의 PC의 기준 시간을 동기화 시키는 작업이 필요하다.
V2V 통신을 이용한 자율주행을 위해선 앞서 기술한 V2V신호의 단점을 더욱 보완할 필요가 있다. 이를 위해선 로컬 센서와의 융합을 통한 주변 상황 인지가 필요하며, 라이다로 인지한 주변 타겟과 V2V 정보와의 매칭 알고리즘 구현을 추후의 연구로 진행할 예정이다.
