

1. 서 론
2. 관련 연구 및 동향
3. V2X 단말기 제어 보드 프로토타입
3.1. 제어 보드 프로토타입
3.2. 제어 보드 I/O 인터페이스
3.3. 제어 보드 에뮬레이션 모드
3.4. 제어 보드 명령어 및 V2X 로우 데이터 구조
4. V2X 단말기 통신성능 평가 시나리오
5. 결 론
1. 서 론
오늘날, 자동차는 차량 상태 및 차량의 주변 상황을 실시간 감지하는 카메라, 레이다, 라이다, 적외선, 초음파 등 다양한 센서 기반의 첨단운전자보조시스템(ADAS)과 인공지능(AI) 기술을 활용하여, 운전자(Human Driver)보다 먼저 교통사고 위험을 감지하고 사전 대처가 가능한 시대가 되었다. 자율주행차도 기본적으로 차량에 장착된 다양한 센서를 기반으로 자율주행기술을 구현한 하나의 자율주행 플랫폼이다. 이러한 자율주행차가 처음 등장하였을 때만 하더라도 통계적으로 사람이 운전하는 자동차와 비교하여 상대적으로 안전한 것으로 생각하였다.
하지만, 최근 자율주행차와 관련된 운전자 및 보행자 충돌 사고가 발생하면서 차량의 센서 데이터만을 이용해서는 완전하지 않다는 것을 공감하게 되었고,(1) 센서 기반의 자율주행 기술만으로는 안전한 교통사고 대응에 한계가 있어서, 이를 극복하는 차원에서 융합형 자율주행이라는 개념이 등장하였고, 자율주행 레벨에 ‘+’ 기호를 붙여서 표현하고 있다. 우리나라는 2027년 융합형 자율주행 Lv. 4+ 상용화 기반을 완성한다는 목표를 위하여 2021년부터 범부처 주도의 자율주행기술개발혁신사업을 진행하고 있다.
또한, EU는 2024년도에 Euro NCAP 평가항목에 V2X 단말기를 새로 추가하는 것을 로드맵에 반영하였으며, 우리나라도 국제 조화를 통하여 K-NCAP에 V2X 단말기 장착을 검토하고 있다. 그리고 유럽, 미국, 일본 등의 국가에서 이미 융합형 C-ITS 실증 및 시범사업을 진행하고 있으며, 우리나라도 C-ITS 구축 로드맵에 따라 2025년까지 대도시권 V2I 인프라를 계속 확대하면서, 해당 기간에 V2X 차량 단말기 70% 보급, 비사업용 차량까지 단말기 의무 장착을 진행하는 계획을 검토하고 있다.(2)
자율주행차(또는 일반 자동차)의 센서 데이터와 차량 주변 상황 정보, 자동차의 운행 데이터 및 교통 인프라 정보를 종합적으로 분석하면 선제적 교통사고 예방을 위한 안전 운행이 가능하다. 앞으로, V2X 단말기가 융합형 자율주행 Lv. 4+를 지원하게 되는 자동차 또는 C-ITS 차세대지능형교통체계 서비스와 연동되게 되는 일반 차량에 기본 장착되고, K-NCAP 안전장치 항목에 신규로 추가되게 되면, V2X 단말기에 대한 단위 장치 및 V2X 통신성능에 대한 안전성이 확보된 제품의 장착 및 사용이 필수적이라 하겠다.
따라서 V2X 단말기에 대한 통신 안전기준 및 평가 기준안이 준비되어야 하는데, 이를 위한 자동차 V2X 통신성능 안전성 평가기술 개발에 필요한 기능을 갖춘 단말기가 필요하여, 본 논문에서 제안하는 V2X 단말기 제어 보드 프로토타입을 구현하였다.
본 논문의 구성은 2장에서 관련 연구 및 동향을 알아보고 3장에서는 본 논문에서 제안하는 V2X 단말기 제어 보드 프로토타입의 구성 및 기능을 소개하고 4장에서는 V2X 통신성능 안전성 평가기술 개발을 위한 평가 시나리오를 설명하고 5장에서는 결론 및 향후 연구 방향에 대해서 논의한다.
2. 관련 연구 및 동향
차량 내부에 장착되어 차량간 V2V 및 차량과 교통 인프라 사이에서의 V2I 통신을 지원하는 V2X 단말기(OBU, On-Board Unit)는 제조사에 따라 내부 구성 및 입출력 인터페이스에 차이가 있다.
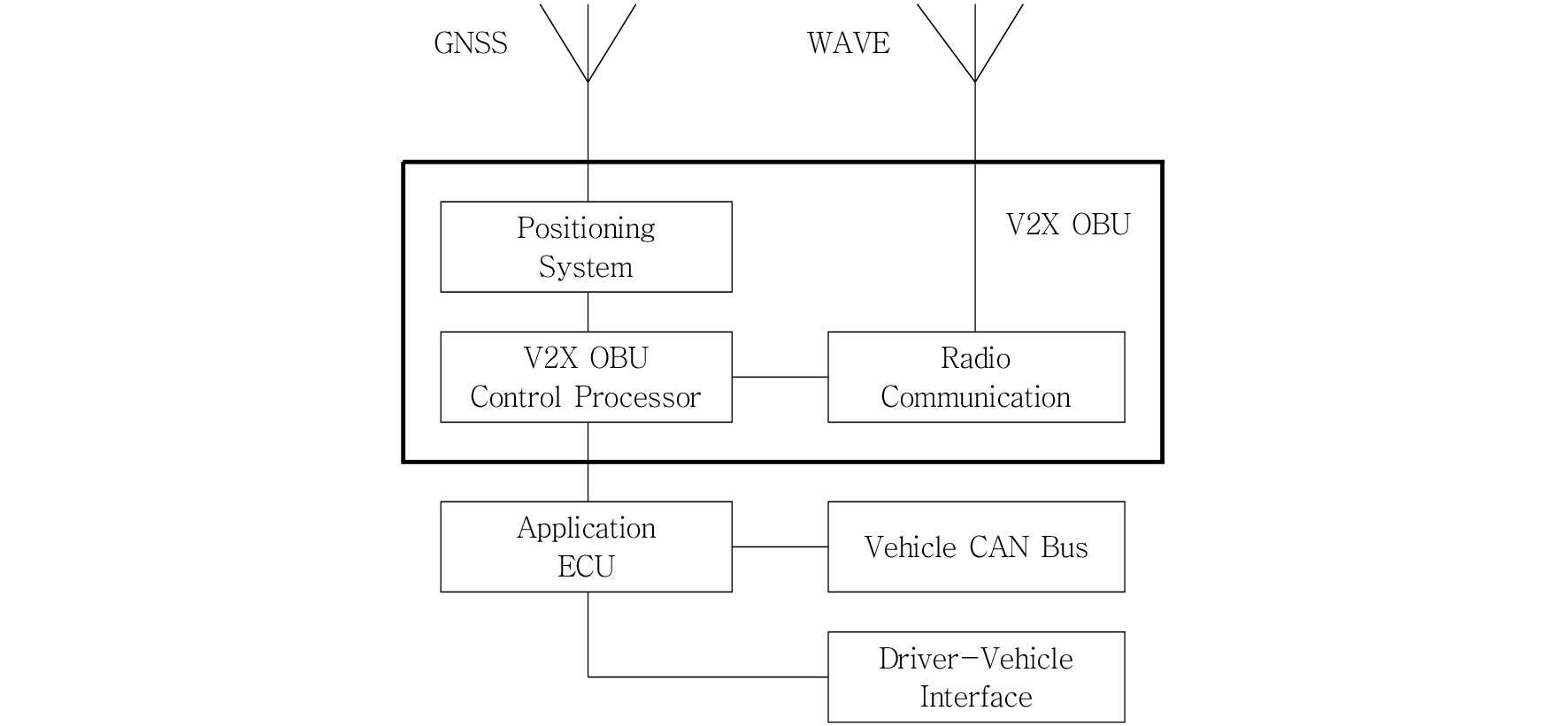
기본적으로 V2X 단말기는 Fig. 1에서 보는 바와 같이 차량의 위치 정보를 수신하는 Positioning System, 자동차 ECU 및 CAN 버스 네트워크와 연동되는 인터페이스 및 통신부와 연결되어 제어 프로세스 역할을 하는 V2X OBU Control Processor, WAVE(또는 C-V2X) 통신부 역할을 담당하는 Radio Communication, GNSS 및 WAVE(또는 C-V2X) 안테나 등으로 구성되며, 운전자와 차량간 인터페이스도 연동된다.
V2X 단말기 제어부(또는 제어 보드)는 차량 및 센서와의 물리적인 인터페이스를 통한 차량 이벤트 확인 및 로우 데이터(Raw Data) 수집이 주요한 기능이다. Table 1은 V2X OBU 상용화 제품들의 인터페이스 구성을 보여주고 있다.(2)
Table 1.
V2X OBU physical interface
| Interface | Model | |||||
| A | B | C | D | E | F | |
| CAN | 3 | 1 | 1 | 2 | 1 | 2 |
| GPIO | 4 | × | 1 | 2 | × | × |
| OBD-II | 1 | × | 1 | × | × | × |
| GNSS | 1 | 1 | 1 | 1 | 1 | 1 |
| Acceleration | × | × | 1 | × | × | × |
| Gyroscope | × | × | 1 | × | × | × |
| Magnetic | × | × | 1 | × | × | × |
차량으로부터 데이터 및 위치 정보 수집을 위하여 CAN 및 다중 채널을 지원하는 GNSS 인터페이스는 필수로 갖추고 있으며, V2X OBU 모델에 따라 선택적으로 OBD-II 인터페이스와 가속도 센서, 자이로스코프 센서, 자기 센서 등이 설계 반영되었음을 알 수 있다.
V2X 단말기 제어부에서는 V2X 메시지 생성을 위해 필요한 로우 데이터를 수집하여 메시지를 생성하는데, V2X 메시지 규격 및 구조에 대한 참조 표준은 SAE J2735 V2X Communications Message Set Dictionary이다.(4) 또한 단말 시스템 요구사항을 정의한 표준은 SAE J2945-1 On-Board System Requirements for V2V Safety Communications 이다.(5)
국내에서는 단체 표준 ITSK-00100-1:2021v2 C-ITS 규격-제1부: 서비스 기능 요구사항에서 C-ITS 서비스 규격에 대해서 정의하고, ITSK-00100-2: 2021v4 C-ITS 규격-제2부: V2X 정보연계에서 C-ITS 메시지 규격을 정의한다.(6,7)
3. V2X 단말기 제어 보드 프로토타입
3.1. 제어 보드 프로토타입
V2X 단말기 제어 보드 프로토타입은 Fig. 2에서 보는 바와 같이 구현하였다. Fig. 3에서 보는 바와 같이, 구현된 제어 보드 프로토타입은 CPU, 가속도 센서, GNSS 모듈, 자이로스코프 센서, 메모리, 통신 보드, 차량 I/O 인터페이스 등으로 구성되며, 차량 및 V2X 통신 보드와 연결되어 동작한다.


3.2. 제어 보드 I/O 인터페이스
제어 보드는 Table 2에서 보는 바와 같이 차량으로부터 주요 신호 및 데이터 수신을 위해 IGN, CAN, 속도, RPM, Brake, KWP 등으로 차량과 연결된다.
Table 2.
V2X OBU control board external interfaces
또한, Fig. 3에서 보는 바와 같이, V2X 통신 보드와의 데이터 송수신 및 전원 공급을 위한 인터페이스인 Comm. I/O Interface, 자동차의 센서 및 통신 네트워크와 연결되는 인터페이스인 Vehicle I/O Interface, 개발 및 시험을 위한 모니터링 용도로 사용되는 인터페이스인 Emulation I/O Interface가 있다.
3.3. 제어 보드 에뮬레이션 모드
제어 보드는 V2X 성능평가를 위한 시험 시나리오 대응을 위하여 아래 Table 3에서 보는 바와 같이 4개의 에뮬레이션 모드를 제공한다. 제어 보드가 제공하는 프로토콜을 이용하여 원격지 또는 외부에서 제어 보드의 에뮬레이션 모드를 선택하여 지정하거나, V2X 로우 데이터 제너레이션 시작 또는 정지시킬 수 있다.
Table 3.
V2X OBU control board emulation modes
먼저, 모드 A는 제어 보드 동작 중에 V2X 로우 데이터를 생성하지 않는다. 제어 보드가 모드 B로 설정되는 경우에는 100 ms 시간 주기로 V2X 로우 데이터를 생성하여 BSM, PVD 등의 메시지 생성에 활용할 수 있도록 통신 보드로 전송한다.
모드 C로 설정되는 경우에는, 사용자가 임의로 정한 ms 단위 시간 간격으로 V2X 로우 데이터를 생성하여 통신 보드로 전송한다. 모드 D는 차량에서 이벤트가 발생하는 경우에만 수집된 V2X 로우 데이터를 제어 보드에 설정된 전송 주기 시간과 관계없이 바로 통신 보드로 전송한다.
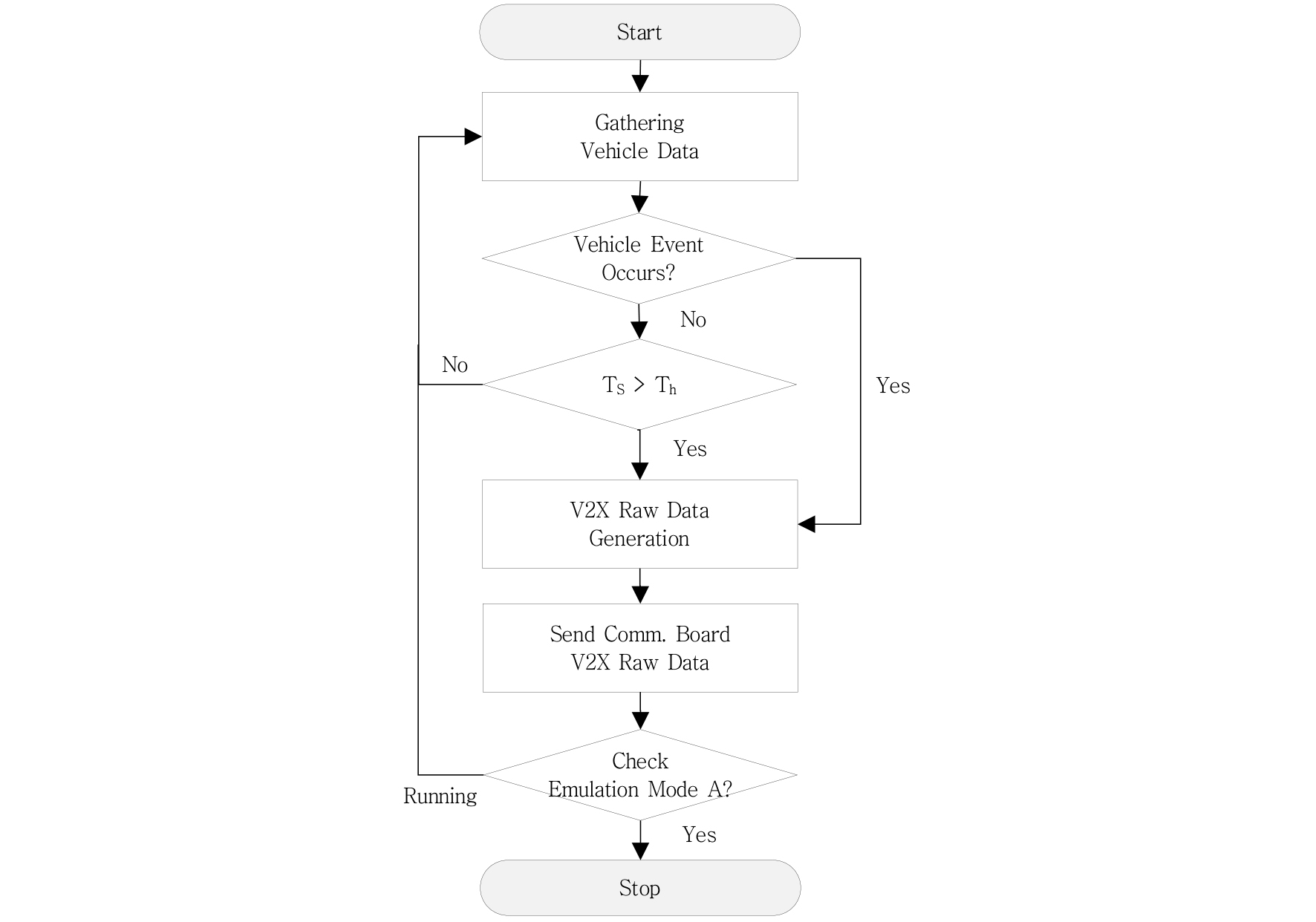
제어 보드는 Fig. 4에서 보는 바와 같은 순서에 의하여 동작하면서, V2X 로우 데이터를 생성하여 통신 보드로 전송한다. V2X 로우 데이터에 대한 전송 판단 시간 Ts가 제어 보드에 설정된 시간 주기 Th보다 큰 경우, 수집된 V2X 로우 데이터를 통신 보드로 바로 전송하며 또한 Th와 관계없이 차량에서 비상등 작동 등과 같이 미리 정의된 이벤트가 발생하는 경우 V2X 로우 데이터를 바로 전송한다. 제어 보드가 에뮬레이션 모드 A로 설정되어 동작하는 경우는 V2X 로우 데이터를 생성하지 않는다.
3.4. 제어 보드 명령어 및 V2X 로우 데이터 구조
Table 4에서 보는 바와 같이 제어 보드의 통신 보드 I/O 인터페이스에 연결된 통신 보드의 통신 기능으로, 원격지에서 제어 보드의 명령어 프로토콜을 이용하여 필요한 데이터가 포함된 메시지를 제어 보드로부터 수신할 수 있다.
Table 4.
V2X OBU control board commands
| Command | Description |
| VI | Configuration and Status Monitoring |
| VT | Emulation Mode Selection |
| VB | Raw Data Message |
| VV | Vehicle and Other Information Monitoring |
| VW | Configuration Information Setting |
제어 보드가 제공하는 명령어는 명령(Command) 또는 응답(Response) 메시지 형태로 사용하며, 명령 메시지는 제어 보드에 설정이 필요한 경우 외부에서 제어 보드로 전송하는 메시지이고, 응답 메시지는 제어 보드에서 생성하여 외부로 송신하는 메시지이다.
Table 5에서와 같이 제어 보드의 입출력 메시지는 헤더(Header), 페이로드(Payload), 트레일러(Trailer)로 구성된다. Table 6은 차량 및 제어 보드의 정보를 확인하는 VI 응답 메시지의 페이로드 구조이다.

Table 6.
VI response message elements
| Category | Data Element | Byte |
| Payload | OBU Model | 20 |
| VIN | 17 | |
| Vehicle Number | 12 | |
| Type Approval Number | 10 | |
| Serial Number | 14 | |
| Status Information | 2 | |
| Reserved | 9 |
Table 7은 제어 보드의 에뮬레이션 동작 모드 설정을 하는 VT 명령 메시지의 데이터 구조이며, Table 8은 V2X 단말기 통신 보드에서 BSM, PVD, 기타 메시지 생성에 필요한 V2X 로우 데이터를 전송하는 VB 응답 메시지의 데이터 구조이다.
Table 7.
VT command message elements
| Category | Data Element | Byte |
| Payload | Emulation Mode | 20 |
| A Mode | 17 | |
| B Mode | 12 | |
| C Mode | 10 | |
| Reserved | 9 |
Table 8.
VB response message elements
Table 9는 단말, 차량, 기타 정보를 제어 보드로부터 조회할 때 사용하는 VV 응답 메시지 및 차종, 차량 폭 및 길이, 각종 인수 등의 정보를 설정할 필요가 있을 떄 사용하는 VW 명령 메시지 데이터 구조이다.
4. V2X 단말기 통신성능 평가 시나리오
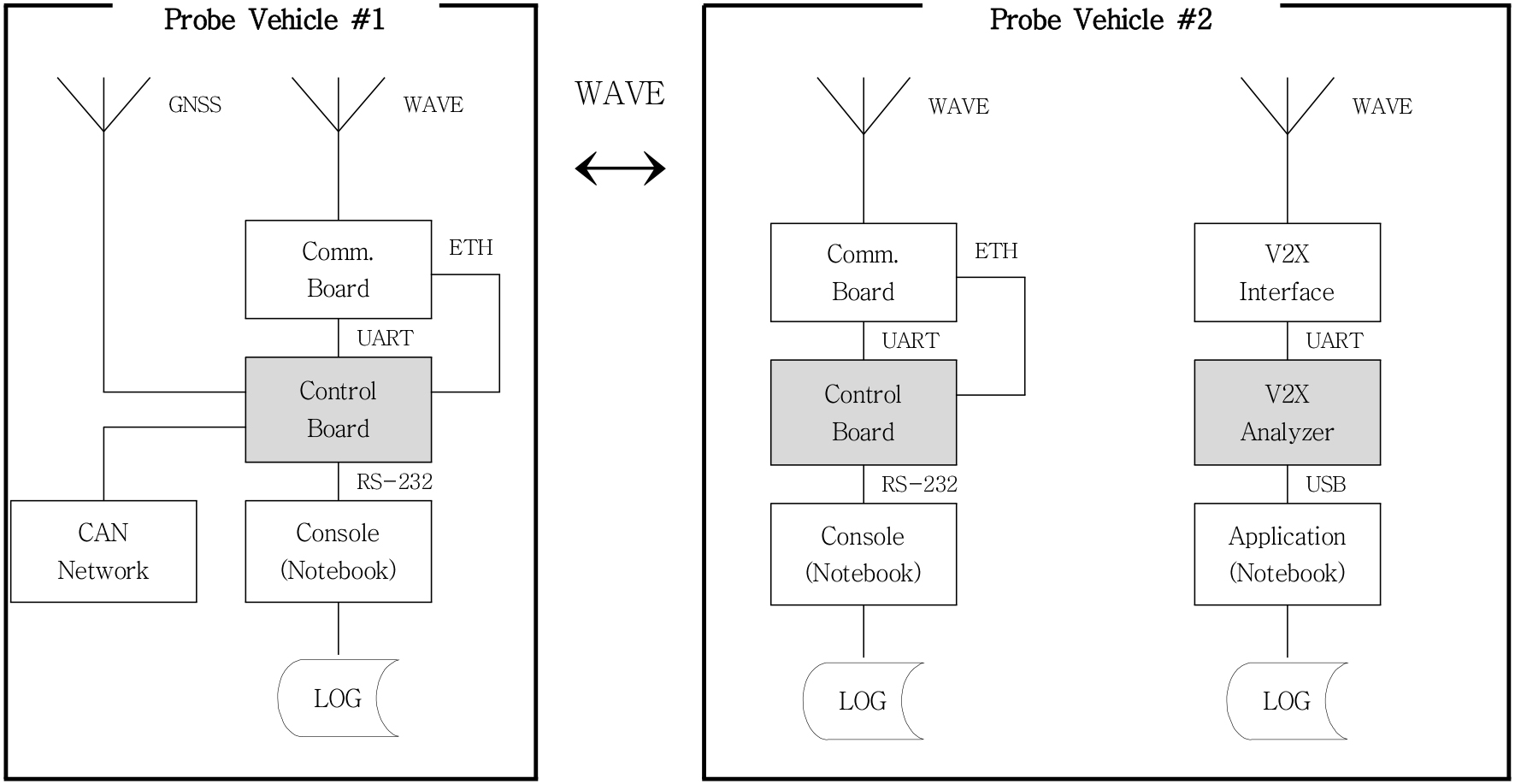
제어 보드는 V2X 단말기 통신성능에 대한 안전성 평가를 위하여 V2X 단말 장착 요구 사항 분석, V2X 안테나 성능 및 설치 기준 분석, V2X 단말 환경평가 요구 분석, V2X 메시지 정확도 평가 등에 활용이 가능하다. 평가 시나리오는 Table 10, 11에서와 같이 평가항목, 평가 시나리오, 평가 장소 및 가능(‘○’)을 정의한다. Fig. 5는 제어 보드와 통신 보드를 결합한 V2X 단말기를 차량에 장착하여 노트북 컴퓨터의 콘솔 프로그램을 연결하는 시험 환경 구성을 정의한다.
Table 10.
V2X communication performance evaluation parameters
| Parameter | lab. | Living Lab | Road |
| BER versus SNR | ○ | ○ | ○ |
| BER versus Velocity, Antenna Location | × | ○ | ○ |
| FER versus Velocity, Antenna Location | × | ○ | ○ |
| RSSI | ○ | ○ | × |
| SNR versus Atten. | ○ | × | × |
5. 결 론
본 연구에서는 융합형 자율주행 Lv. 4+ 차량에 기본 장착되는 V2X 단말기의 통신성능 안전성 평가기술 개발에 활용이 가능한 V2X 단말기 제어 보드 프로토타입을 구현하고, 동작 모드 설정 및 V2X 로우 데이터 제너레이션 확인을 통하여 제어 보드 프로토타입이 정상 동작하는 것을 확인하였다. 앞으로 본 논문에서 구현한 V2X 단말기 제어 보드 프로토타입을 기반으로 WAVE 통신 보드와 결합한 형태의 시제품을 제작하여, 제시된 V2X 단말기 통신성능 평가 시나리오를 바탕으로 V2X 통신 안전성 평가기술 개발, 단위 장치 및 안테나 장착, 성능 기준 개발에 활용할 계획이다.
