

1. 서 론
2. 가상주행환경 개요 및 선행 연구
2.1. FMTC 가상주행환경의 개요
2.2. 선행 연구 고찰
3. 가상주행환경 구축 및 고도화
3.1. 가상주행환경 구축
3.2. 가상주행환경 고도화
4. 가상주행환경 고도화 검증
4.1. 가상주행환경 정확도 검증을 위한 평가 기준
4.2. 가상주행환경 정확도 검증
4.3. 도로 주변 구성요소 비교를 통한 검증
5. 결 론
1. 서 론
오늘날의 자율주행 시스템은 실도로 기반의 테스트와 더불어 가상 환경에서의 시뮬레이션의 중요도가 높아지고 있다. 가상환경에서의 시나리오는 실제 환경에서 구현하기 어려운 시나리오 또는 사고 위험이 높은 시나리오를 구성할 수 있다. 이에 가상주행환경에서도 실제 환경에서의 센서 거동을 모사해야 할 필요성이 높아지고 있다.
이에 본 연구에서는 서울대학교 시흥캠퍼스 FMTC(Future Mobility Technical Center)를 대상으로 고정밀지도로부터 추출된 데이터를 이용하여 FMTC의 가상주행환경 구축과 가상주행환경 고도화를 진행하고자 한다. 또한 FMTC와의 비교분석을 통해 유사도 검증을 진행하고자 한다.
2. 가상주행환경 개요 및 선행 연구
본 장에서는 FMTC 가상주행환경 구성 시 사용된 용어에 대한 정리를 진행한다. 또한 선행 연구 고찰을 통해 본 연구의 연구 배경을 확인한다.
2.1. FMTC 가상주행환경의 개요
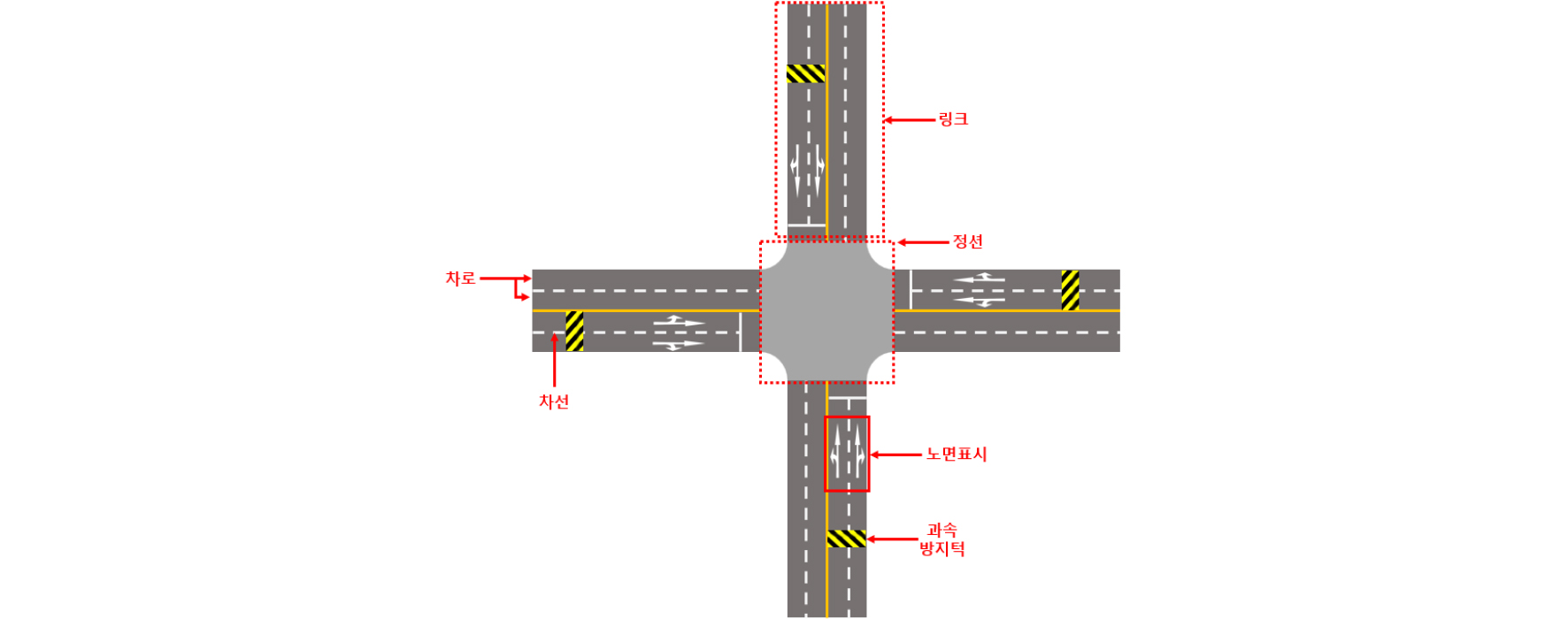
FMTC 가상주행환경 고도화 작업 진행을 위해 작업 진행 시 사용된 용어에 대하여 정리하고자 한다. FMTC 가상주행환경이란 가상의 환경에서 시뮬레이션이 가능한 도로모델을 의미한다. 이때 도로모델에는 도로 형상 뿐 아니라 도로의 정적 객체도 포함된다. 차로(Lane)는 차량이 주행할 수 있도록 차선으로 구분된 차도의 부분이다. 차선(Road Maker)은 차로와 차로의 경계지점을 표기한 선으로 본 연구에서는 차선의 범주에 중앙선을 포함한다. 노면 표시는 차선이 아닌 횡단보도, 화살표 등의 노면에 표시된 형태를 의미한다. 교통표지판은 안전 표지판이 아닌, 사각형으로 된 경로 및 구역을 안내하는 표지판을 의미한다. 안전표지판은 교통표지판 외 주의, 규재, 지시 등을 표시하는 표지판을 의미한다. 신호등은 교통안전시설에 정의된 신호등을 의미한다. 과속방지턱 또한 교통안전시설에 정의된 과속방지턱을 의미한다. 링크(Link)는 정션(Junction)과 연결된 것을 의미하며, 이때 정션은 교차로 부분에 해당한다. 교차로를 제외한 차도 부분을 의미한다. 세그먼트(Segment)는 링크를 구성하는 요소로써 하나의 세그먼트가 하나의 링크가 될 수 있다. 직선 세그먼트, 곡선 세그먼트 등이 포함된다. 기준선(Reference line)은 링크가 생성될 때 기준이 되는 선을 의미한다. 위와 같은 내용은 Fig. 1에서 확인할 수 있다.
2.2. 선행 연구 고찰
가상주행환경에서의 자율주행 시스템 검증의 중요도가 높아지고 있다. 이에 따라 실제 환경과 유사한 가상주행환경을 구축하기 위한 다양한 연구들이 수행되었다.
Park et al.(1)은 정밀 도로지도(NGII HD map)를 활용하여 자율주행 기술의 안정성과 신뢰성 수준을 평가하기 위한 OpenDrive 형식으로의 변환방안을 제시하였고, 가상 자율주행 시뮬레이션 검증을 통하여 정밀 도로지도의 활용성과 기능 확장 가능성을 제안하였다. Oh et al.(2)은 정밀 도로지도 활용을 위해 데이터 활용성 검증을 수행하였고, 이를 활용하여 시뮬레이션 주행 활용성을 검증하였다. Kang et al.(3)은 주행 거리 기반의 랜덤 트래픽 상황에서 차량의 제어로직을 평가할 수 있는 가상주행환경과 차량 모델 구축과 연동 기법을 제시하였다. Kwon et al.(4)은 국내 3곳의 실제 도로 환경을 선정하여 국토지리정보원에서 제공하는 자율주행에 필요한 도로 정보와 주변 시설물 정보와 더불어 추가적인 측량을 통해 정밀한 정밀 도로지도 DB를 구축하였다.
기존 진행되었던 연구에서 확인할 수 있듯이 자율주행 시스템 검증을 위한 정밀 도로지도를 활용한 연구는 활발히 진행되고 있다. 이에 본 논문에서는 정밀 도로지도를 활용하여 가상환경에서의 시뮬레이션에서 자율주행 시스템 검증에 활용할 수 있도록 실제 도로 환경과 유사한 가상주행환경 모델을 구축하고 시설물에 대한 모델 고도화 작업을 진행하였다.
3. 가상주행환경 구축 및 고도화
본 장에서는 FMTC를 가상 주행환경으로 활용할 수 있도록 FMTC 가상주행환경을 구축하고 고도화 한다. IPG Automotive의 CarMaker를 이용하여 FMTC 가상주행환경을 구축하고, 정적 객체를 이용하여 고도화를 진행한다.
3.1. 가상주행환경 구축
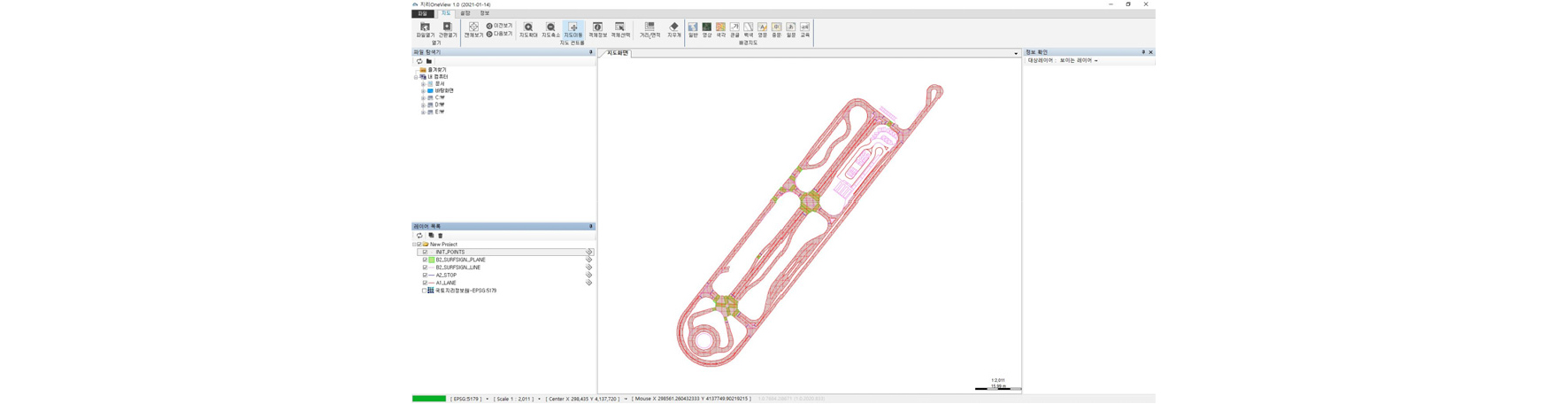
FMTC 가상주행환경 구축을 위하여 FMTC의 정밀 도로지도를 활용하였다. 정밀 도로지도는 도로의 지형·시설 정보 등을 가지고 있어 단순 차량 네비게이션 지도 대비 방대한 정보를 가지고 있다.(2)Fig. 2와 같은 정밀 도로지도 파일을 이용하여 CarMaker의 시나리오 편집기에서 불러올 수 있는 kml 파일로 변환하였다. 그리고 변환된 kml 파일을 Google Earth 상에서 확인하여 실제 위치와 동일한 GPS 정보를 확인하였다.
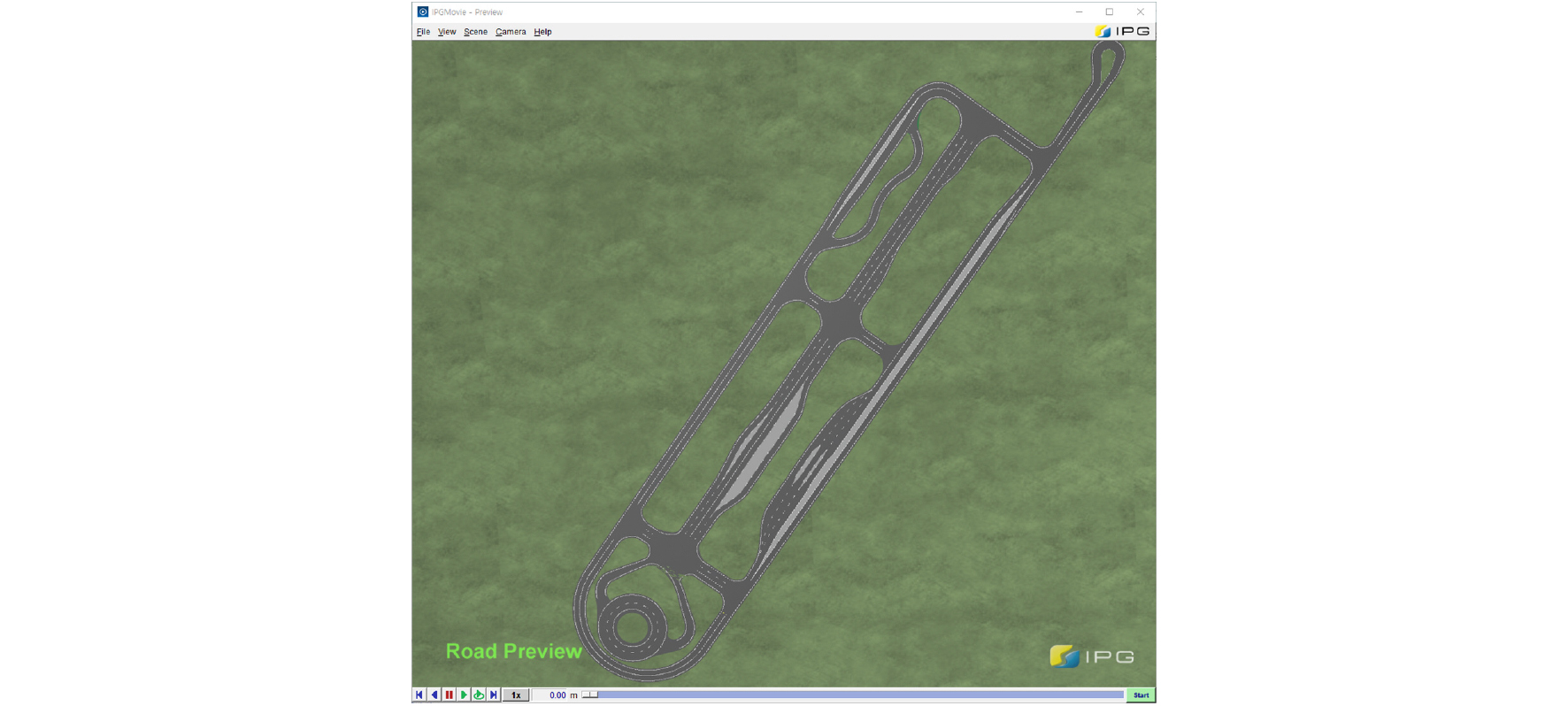
변환된 kml 파일을 CarMaker 내 시나리오 편집기에서 불러와 Fig. 3과 같이 가상환경에서 시뮬레이션을 진행할 수 있도록 FMTC 가상주행환경을 구축하였다. 이때 kml 파일 불러오기 진행 시 도로의 기준선을 바탕으로 차로의 정보 없이 링크가 생성되므로 FMTC 도면을 기준으로 차로의 너비를 조정하고 생성된 세그먼트 간의 연결부 생성 작업을 진행하였다.
3.2. 가상주행환경 고도화
3.1절에서 구축된 FMTC 가상주행환경을 CarMaker의 시나리오 편집기를 이용하여 차로와 주차장, 인도, 차선, 노면 표시 등의 주변 환경들을 추가하여 고도화를 진행하였다. 또한 FMTC의 도면을 이용하여 각 링크와 차로의 높이 정보(Elevation profile)를 추가함으로써 FMTC에서 주행하는 것과 같은 환경을 구성하였다.
3.1절에서 구축된 FMTC 기본 도로모델에 FMTC와 유사한 노면표시와 차선을 추가 하였다. 이때 위치는 FMTC 도면을 참고하여 구성하였다. 또한 FMTC에 추가되어 있는 교통 및 안전표지판과 신호등을 FMTC 가상주행환경에 추가함으로써 자율주행 시스템이 FMTC에서 주행 시 발생한 센서 거동과 동일한 센서 거동이 나올 수 있도록 구성하였다. FMTC 도면을 활용하여 기본 도로 형상에 높이 정보를 추가함으로써 차량 동역학 특성을 반영할 수 있도록 고려하여 고도화가 진행되었다.
Fig. 4와 같이 고도화된 FMTC 가상주행환경을 확인할 수 있다. 기존 도로 형상만 구성된 FMTC 가상주행환경에서 주차장 구간이 추가되었으며, 구체화된 차선 정보와 정적 객체를 확인할 수 있다. 고도화된 FMTC 가상주행환경의 시설물은 아래 Table 1과 같이 확인할 수 있다.
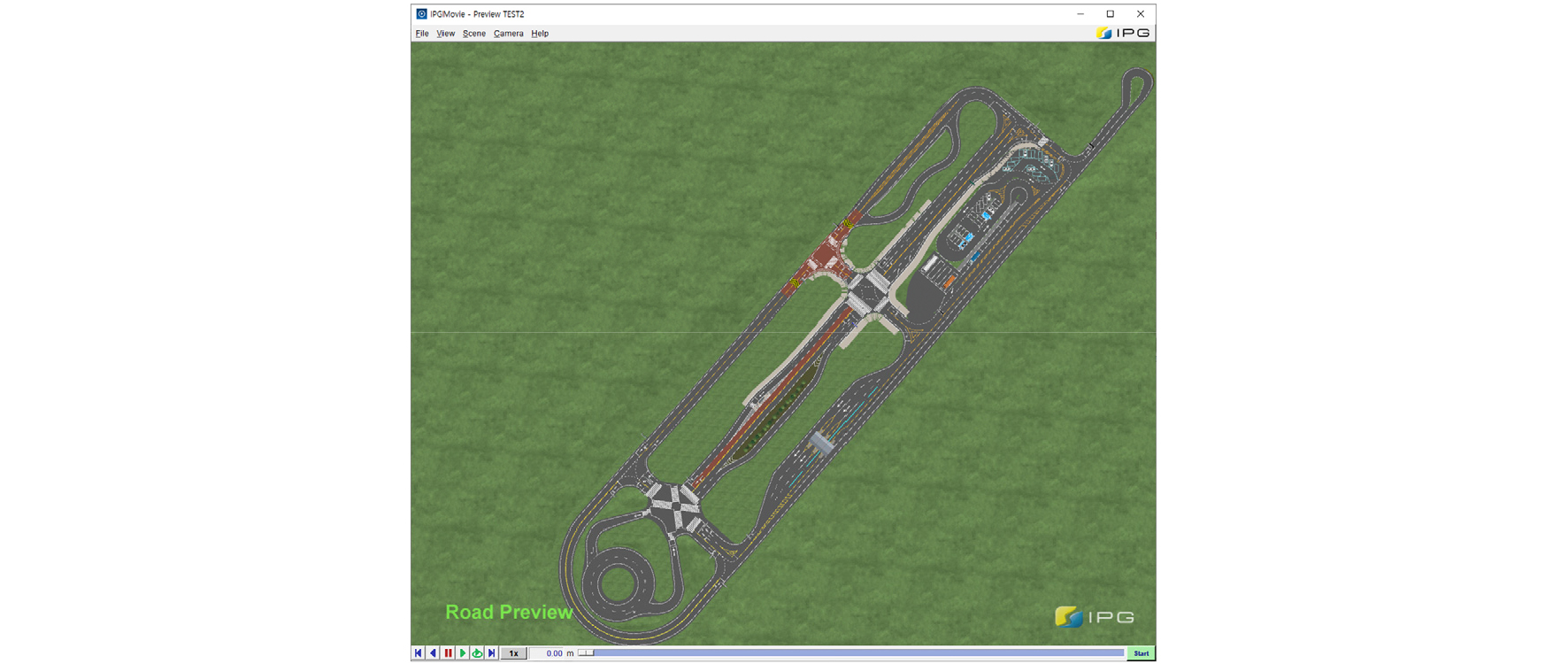
Table 1.
Advanced FMTC virtual driving environment results
4. 가상주행환경 고도화 검증
본 장에서는 3장에서 구축 및 고도화가 진행된 FMTC 가상주행환경에 대하여 FMTC와의 유사성 검증을 진행한다. 3장에서 구축 및 고도화가 진행된 FMTC 가상주행환경을 자율주행 시스템 검증에 활용하기 위하여 FMTC와의 유사도를 검증할 필요가 있다. 이를 위해 정밀 도로지도, FMTC 도면, FMTC 구조물과 FMTC 가상주행환경 고도화 모델을 비교하여 자율주행 시스템 검증에 활용 가능함을 확인하였다.
4.1. 가상주행환경 정확도 검증을 위한 평가 기준
검증 기준은 위치 정확도, 형상 정확도, 내용 정확도, 기능 정확도로 구분하였으며 각 정확도 별 점수 합산을 통해 항목별 정확도 유사도 비율을 설정하였다. 각 정확도별 기준에 대하여 A, B, C, D의 단계로 구분하였으며 단계별로 10, 7, 5, 0점을 배점하였다. 최종 정확도는 각 정확도 항목 별 점수에 계수를 곱한 것의 합산으로 계산하였으며 이때 계수는 정확도 항목 별 중요도에 따라 차등을 두었다. 위치 정확도와 내용 정확도의 경우 가상주행환경에서의 시뮬레이션 진행 시 중요도가 높은 항목이기 때문에 타 항목에 비하여 높은 계수를 설정하였다. 형상 정확도의 경우 가상주행환경에서의 시뮬레이션 시 센서 인식 방향에 따라 확인되는 범위가 달라질 수 있으므로 낮은 계수를 설정하였다. 기능 정확도의 경우 내용 정확도와 유사한 기준을 포함하고 있기 때문에 낮은 계수를 설정하였다. 이에 대한 상세한 내용은 Table 2에서 확인할 수 있다. 항목 검증 시 사용되지 않은 정확도 항목은 A구간으로 설정하여 기본 점수를 구성하였다. 가상주행환경 정확도 검증은 항목별 90점 이상의 유사도를 목표로 하고 있다. 4.2절과 4.3절에서는 이러한 기준을 이용하여 유사도 검증을 진행하였다.
Table 2.
Virtual driving environment verification criteria
| 위치 정확도 (a) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 형상 정확도 (b) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 내용 정확도 (c) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 기능 정확도 (d) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 검증별 정확도 | (a*4)+(b*1.5)+(c*3)+(d*1.5) = 100 | |
4.2. 가상주행환경 정확도 검증
4.2절에서는 Fig. 5와 같이 FMTC와 FMTC 가상주행환경의 도로 구성항목을 비교함으로써 유사도 검증을 진행하였다. FMTC 내 각 사이트 내 차량의 주행 차선을 기준으로 확인하였으며, 검증대상은 도로 구성항목 중 교차로와 차로, 높이 정보, 노면 표시, 차선 정보이다.
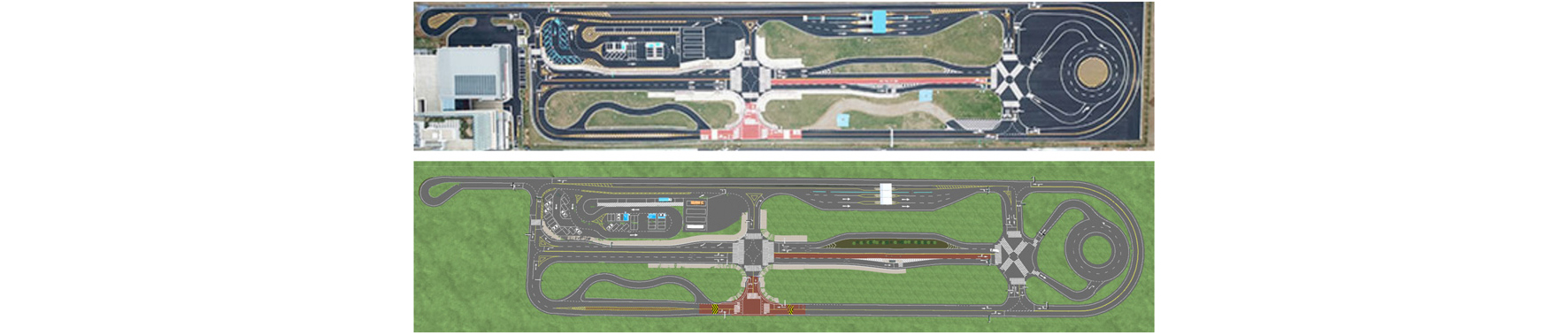
4.2.1. 도로 형상 검증
도로 형상 검증은 Fig. 5와 같이 고정밀지도와 FMTC 도면, FMTC 형상을 FMTC 가상주행환경과 비교하여 위치 정확도, 형상 정확도, 내용 정확도, 기능 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 3에서 확인할 수 있다.
Table 3.
Road elements verification criteria
위치 정확도의 경우 고정밀지도를 kml 파일로 변환하여 사용하였다. kml 파일의 경우 GPS 데이터를 기반으로 생성된 파일로써, 해당 파일을 이용하여 생성된 CarMaker 도로 모델 또한 도로 모델 내 GPS 정보를 가지게 된다. 이를 이용하여 FMTC 위성지도에 CarMaker 도로 모델 및 주행 경로를 추가하여 확인할 수 있다. FMTC와 FMTC 가상주행환경의 동일한 지점에서의 위치 좌표를 확인하였으며, 그에 따라 FMTC와 위치 편차가 5cm이내임을 확인하였다. 형상 정확도의 경우 차로의 폭과 높이 편차를 기준으로 하였으며, 차로 폭의 경우 일부 구간에서 8cm이내의 편차가 있는 것을 확인하였다. 또한 높이 정보의 경우 톨게이트 옆 구간을 확인하였으며, FMTC 와의 높이 편차는 5cm이내임을 확인하였다. 내용 정확도의 경우 구간별 주행 차로의 개수가 차이 없음을 확인하였다. 이때의 주행 차로는 실제 차량이 주행할 수 있는 구간을 의미한다. 기능 정확도의 경우 이러한 주행 차로에서 차량이 정상 주행할 수 있는지를 중점으로 확인하였으며, 전 구간 시뮬레이션이 가능한 것으로 확인하였다. 이에 따른 도로 형상 검증의 결과는 Table 4와 같다.
4.2.2. 노면 표시 검증
노면 표시 검증은 FMTC 도면과 FMTC 형상을 FMTC 가상주행환경과 비교하여 위치 정확도, 형상 정확도, 내용 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 5에서 확인할 수 있다. 검증 예시는 Fig. 6과 같다.
Table 5.
Road painting verification criteria

위치 정확도의 경우 FMTC 도면과 FMTC 현장사진을 활용하였으며, 노면 표시의 경우 일부 구간에서 위치 편차 12cm이내임을 확인하였다. 형상 정확도의 경우 FMTC와 비교하여 흰색, 파란색, 노란색의 색상이 올바르게 표시 되었는가를 중점으로 확인하였으며, 이때 차이가 없음을 확인하였다. 내용 정확도의 경우 안내하는 내용이 동일한지에 대한 것을 확인하였으며, 이때 화살표 및 안내 문구, 횡단 보도 등의 노면 표시가 올바르게 표시 되었음을 확인하였다. 기능 정확도의 경우 노면 표시로써 차량에게 정보를 전달하는 역할을 수행하는 것을 중점으로 확인하였으며, 이때 내용 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도는 확인하지 않았다. 이에 따른 노면 표시 검증의 결과는 Table 6과 같다.
4.2.3. 차선 표시 검증
차선 표시 검증은 FMTC 도면과 FMTC 형상을 FMTC 가상주행환경과 비교하여 위치 정확도, 형상 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 7에서 확인할 수 있다. 이때 기본 3색은 흰색, 파란색, 노란색을 의미한다. 검증 예시는 Fig. 7과 같다.
Table 7.
Road marking verification criteria
위치 정확도의 경우 FMTC 도면과 FMTC 현장사진을 활용하였으며, 차선 표시의 경우 위치 편차 5cm이내임을 확인하였다. 형상 정확도의 경우 FMTC와 비교하여 흰색, 파란색, 노란색이 올바르게 표기 된 것을 확인하였으나, 2 구간에 대하여 안전지대 표시가 미비한 부분이 있는 것을 확인하였다. 내용 정확도와 기능 정확도의 경우 차선 표시가 포함하고 있는 내용과 차선 표시를 이용하여 차량이 올바르게 주행할 수 있는지를 중점으로 확인하였으며, 이때 형상 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도는 확인하지 않았다. 이에 차선 표시 검증의 결과는 Table 8과 같다.
4.3. 도로 주변 구성요소 비교를 통한 검증
4.3절에서는 FMTC와 FMTC 가상주행환경 중 도로 주변 구성요소들을 비교함으로써 유사도 검증을 진행하였다. 검증 대상은 주행 도로 외 교통 및 안전표지판, 신호등, 인도, 과속방지턱 등의 정적 객체 항목이다.
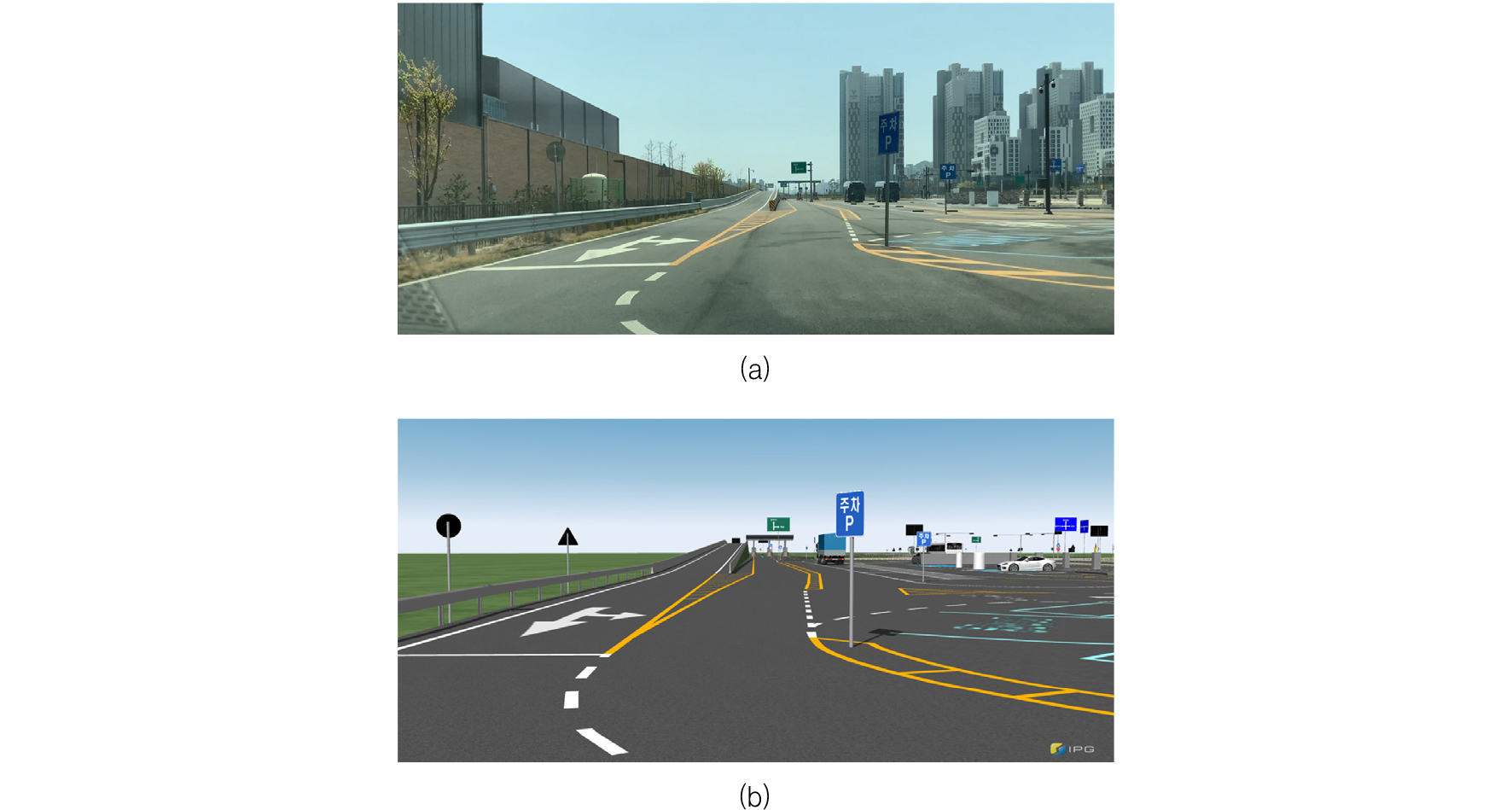
4.3.1. 교통 및 안전 표지판 검증
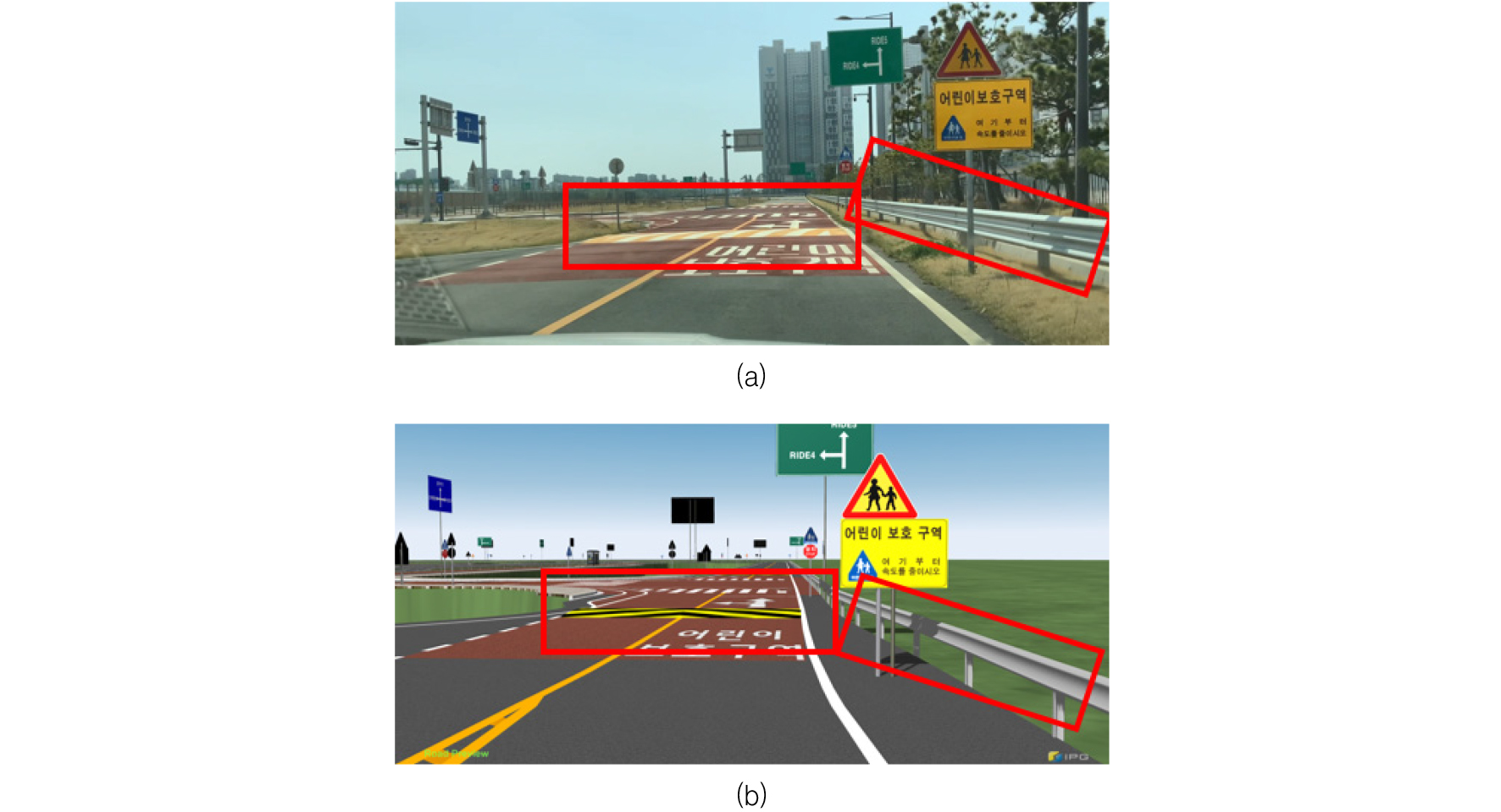
교통 및 안전 표지판 검증은 FMTC 현장 사진과 FMTC 가상주행환경과 비교하여 위치 정확도, 형상 정확도, 내용 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 9에서 확인할 수 있다. 검증 예시는 Fig. 8과 같다.
Table 9.
Traffic signs verification criteria

위치 정확도의 경우 FMTC 도면과 FMTC 현장 사진을 활용하였다. FMTC 도면 속 교통 및 안전 표지판의 위치를 확인하였으며, CarMaker 내 FMTC 가상주행환경 구성 화면과 도면을 겹쳐서 교통 및 안전 표지판의 위치 정확도를 확인하였다. FMTC 현장 사진을 이용하여 FMTC 도면에 해당하는 교통 및 안전 표지판이 추가 되어 있음을 확인하였다. 이에 따라 교통 및 안전 표지판의 위치 편차가 5cm이내임을 확인하였다. 형상 정확도의 경우 121개의 표지판에 대하여 FMTC와 유사한 색상과 동일한 도형의 형상을 가지고 있는 것을 확인하였다. 내용 정확도의 경우 교통 및 안전 표지판에 대하여 121개의 표지판이 FMTC 내 표지판에서 안내하는 내용과 동일한 내용을 가지고 있음을 확인하였다. 교통 및 안전 표지판의 경우 자율주행차량에 정확한 내용을 전달해주어야 하는 기능을 가짐에 따라 내용 정확도 항목을 확인하였다. 기능 정확도의 경우 교통 및 안전 표지판으로써 차량에 정보를 전달하는 역할을 수행하는 것을 중점으로 확인하였으며, 이때 내용 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도는 확인하지 않았다. 이에 따른 교통 및 안전 표지판 검증 결과는 Table 10과 같다.
4.3.2. 신호등 검증
신호등 검증은 FMTC 현장 사진과 FMTC 도면을 FMTC 가상주행환경과 비교하여 위치 정확도, 형상 정확도, 기능 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 11에서 확인할 수 있다. 검증 예시는 Fig. 9와 같다.
Table 11.
Traffic lights verification criteria
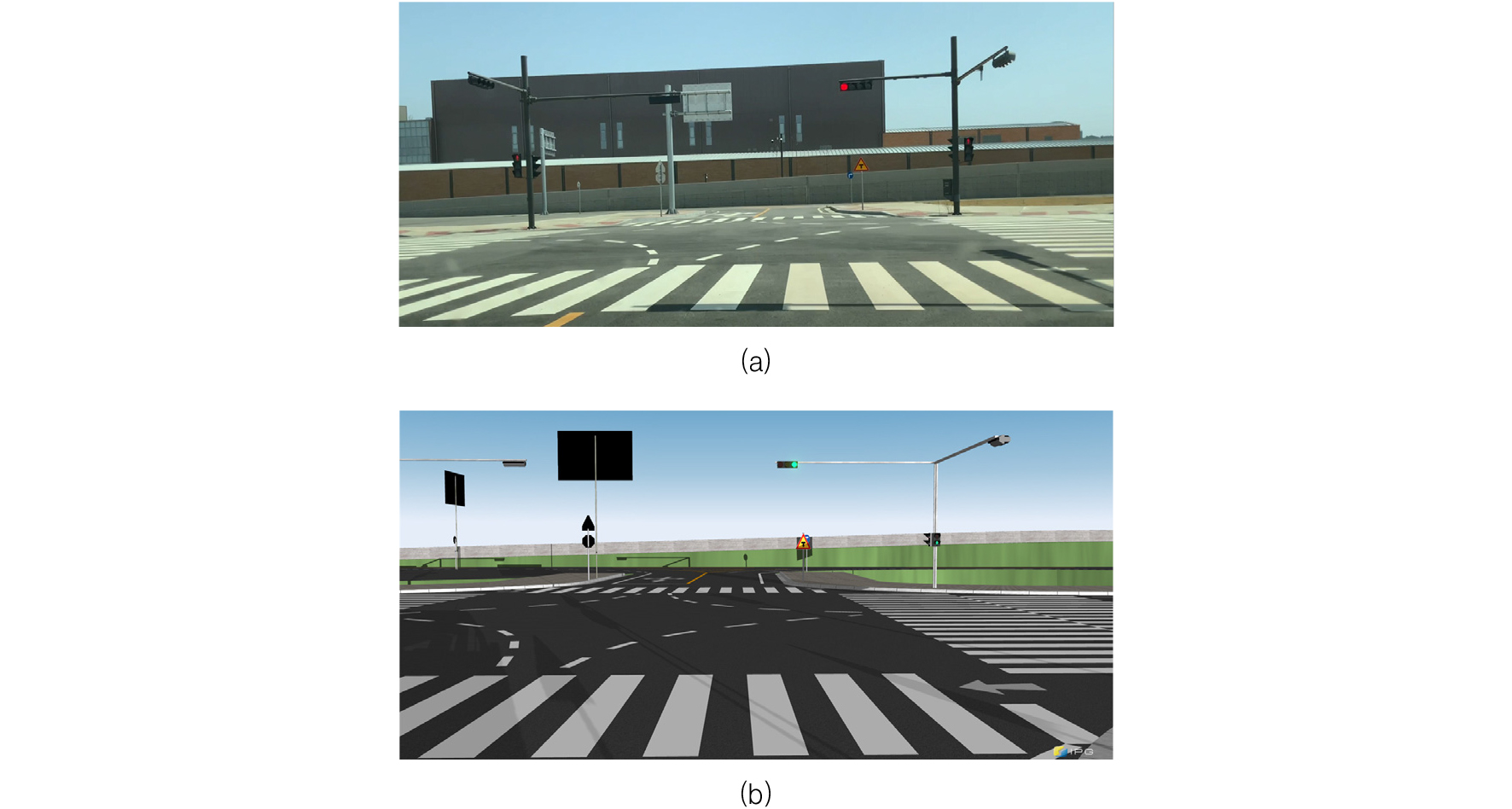
위치 정확도의 경우 FMTC 도면과 FMTC 현장 사진을 활용하였으며 16대의 신호등 중 보행자 신호등의 위치 편차가 5cm이내인 것을 확인하였다. 형상 정확도의 경우 초록-노랑-빨강의 기본 신호가 존재하며 따로 좌회전 신호가 미비한 것으로 확인하였다. 내용 정확도의 경우 신호등이 포함하고 있는 내용에 대하여 중점으로 확인하였으며, 이는 형상 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도는 확인하지 않았다. 기능 정확도의 경우 신호등으로써 차량과 보행자에게 어떻게 신호를 줄 수 있는지를 중점으로 확인하였으며, FMTC의 신호 현시에 대한 구체화된 자료가 없어 동일하지는 않지만 사용자가 수정 가능하도록 신호 현시를 구성하였다. 이에 따른 신호등 검증 결과는 Table 12와 같다.
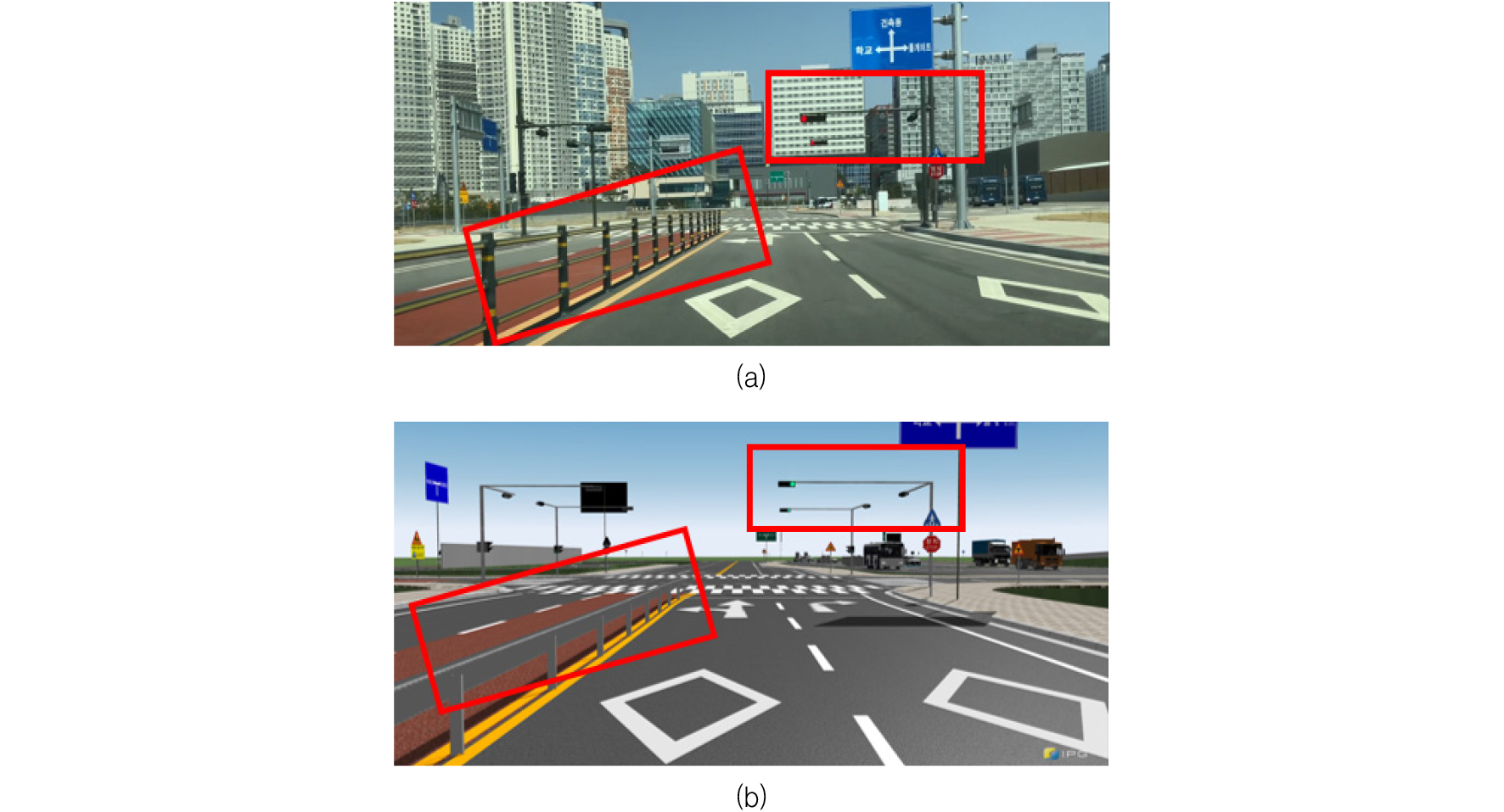
4.3.3. 기타 정적 객체 검증
기타 정적 객체 검증은 도로 모델 내에 있는 인도, 과속방지턱, 중앙분리대, 가드레일 등을 대상으로 하였다. FMTC 현장 사진과 FMTC 도면을 FMTC 가상주행환경과 비교하여 위치 정확도, 형상 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 13에서 확인할 수 있다. 검증 예시는 Fig. 10과 Fig. 11과 같으며, 해당 그림 속에서 인도와 중앙분리대, 가드레일 등을 확인할 수 있다.
Table 13.
Static object verification criteria
| 위치 정확도 | 위치 편차 10cm 이내 | 10 |
| 위치 편차 20cm 이내 | 7 | |
| 위치 편차 30cm 이내 | 5 | |
| 위치 편차 35cm 이상 | 0 | |
| 형상 정확도 | 형태 및 색상 차이 5% 이내 | 10 |
| 형태 및 색상 차이 15% 이내 | 7 | |
| 형태 및 색상 차이 25% 이내 | 5 | |
| 형태 및 색상 차이 28% 이상 | 0 | |
| 내용 정확도 | 기본 점수 | 10 |
| 기능 정확도 | 기본 점수 | 10 |
위치 정확도의 경우 FMTC 도면과 FMTC 현장 사진을 활용하였으며 도로 모델 내에 있는 정적 객체의 경우 위치 편차가 5cm 이내임을 확인하였다. 형상 정확도의 경우 중앙분리대 1건에 대하여 경량 플라스틱 중앙분리대가 아닌, CarMaker에서 지원하고 있는 기본 모델로 대체되어 구현되었음을 확인하였다. 또한 과속방지턱의 경우 색상이 FMTC의 색상이 아닌 CarMaker에서 지원하고 있는 색상으로 구성되었음을 확인하였다. 내용 정확도는 정적 객체가 포함하고 있는 내용이 정확한지를 중점으로 확인하였으며, 기능 정확도 또한 차량에 안내될 수 있는 형상을 가지고 있는지를 중점으로 확인하였다. 단, 내용 정확도와 기능 정확도는 형상 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도는 확인하지 않았다. 이에 따른 정적 객체 검증 결과는 Table 14와 같다.
