

1. 서 론
2. 기본·심화 시나리오 및 평가 항목
2.1. 기본 시나리오
2.2. 심화 시나리오
2.3. 안전성·성능 평가요소
3. 시나리오 구현
3.1. 실도로 주행 기반 시나리오 구현
3.2. 자율주행 차량 구성
4. 시나리오 검증
4.1. 기본 시나리오 검증
4.2. 심화 시나리오 검증
5. 결 론
1. 서 론
전 세계의 자동차 제조업체와 IT 기업들이 자율주행차 개발에 박차를 가하고 있다. 자율주행차 시장은 2025년 4000억 달러까지 성장할 것으로 예측되며 그 성장세는 더욱 빨라질 전망이다.(1) 글로벌 컨설팅 기업KPMG가 선정한 2020년 국가별 자율주행차 준비도지수를 보면 대한민국은 인프라 개선 측면에서 높은 점수를 받아 7위를 기록했다.(2) 그러나 여전히 정책과 규제 부문에서는 상위권 국가들과 비교해 낮은 평가를 받고 있다. 따라서 우리나라가 자율주행 산업에서 선두에 서기 위해서 자율주행차 평가기술 개발이 시급하다.
현재 유럽에서는 Euro NCAP 안전 성능 평가 프로그램을 통해 자율주행 테스트를 진행하고 있으며(3) 미국과 중국은 각각 M-City, Nice City라는 시설 내 모의 실험 환경을 구축해 자율주행 차체 기술을 시험 및 실증 중이다.(4) 한국의 경우 2016년부터 시험 및 연구 목적으로 자율주행차를 운행할 수 있도록 임시운행허가 제도를 마련하였다. 이에 지난 2016년 3월, 현대자동차의 최초 허가 이후 임시운행허가 사례가 지속적으로 증가하는 추세이다.(5)
그럼에도 불구하고 자율주행 자동차의 실제 도로 주행을 위한 운전능력 및 자격 평가, 검증은 여전히 미비한 실정이다.(3) 기존 차량에서 운전자가 인지, 판단, 제어하는 것과 다르게 자율주행 자동차는 시스템이 이를 맡으므로 긴급한 Cut-in이나 차선 변경 시 양보 의도가 없는 후방 차량 등 실도로에서 발생 가능한 사고위험 상황에서 운전자의 사고 대응 역량 이상을 발휘해야 한다. 자율주행시스템이 실도로에서 인간을 대신하여 안전하게 운행되는지를 확인하기 위해서는 실차에 의한 실증연구가 요구되고 이에 따라 안전성을 확보하고 평가하기 위한 기술 역시 새롭게 제시되어야 한다.
이에 본 논문은 자율주행 자동차의 실도로 주행을 위한 성능 평가 시나리오와 시나리오에서 평가해야 할 요구 사항을 제안하려고 한다. 또한, 자율주행 시스템이 다양한 시나리오에서 일반 운전자와 얼마나 흡사한 거동을 보이는지를 비교하는 것이 안전성 검증에 유의미하다는 것을 고려하여(6) 데이터 수집·분석 플랫폼을 구현하였고, 실제 수집 데이터 분석을 통해 성능 평가 시나리오를 검증하였다.
2. 기본·심화 시나리오 및 평가 항목
자율주행 시스템과 일반 운전자가 조작하는 차의 거동을 직접 비교하기 위해 동일한 시나리오를 수동주행과 자율주행으로 실험한다. 시나리오는 자율주행 차가 주행함에 있어서 기본적으로 갖춰야 할 기능을 테스트하는 기본 시나리오와 실도로를 주행할 때 발생할 수 있는 위급상황을 가정한 심화 시나리오로 나누어진다.
2.1. 기본 시나리오
자율주행 차량의 기본 주행은 크게 차선 유지, 차선 변경, 안전거리 유지로 이루어져 있다. 이러한 기본 주행 성능을 평가하기 위한 시나리오와 함께, 시나리오별 안전성 평가 항목도 제시하였다.
2.1.1. 차선 유지
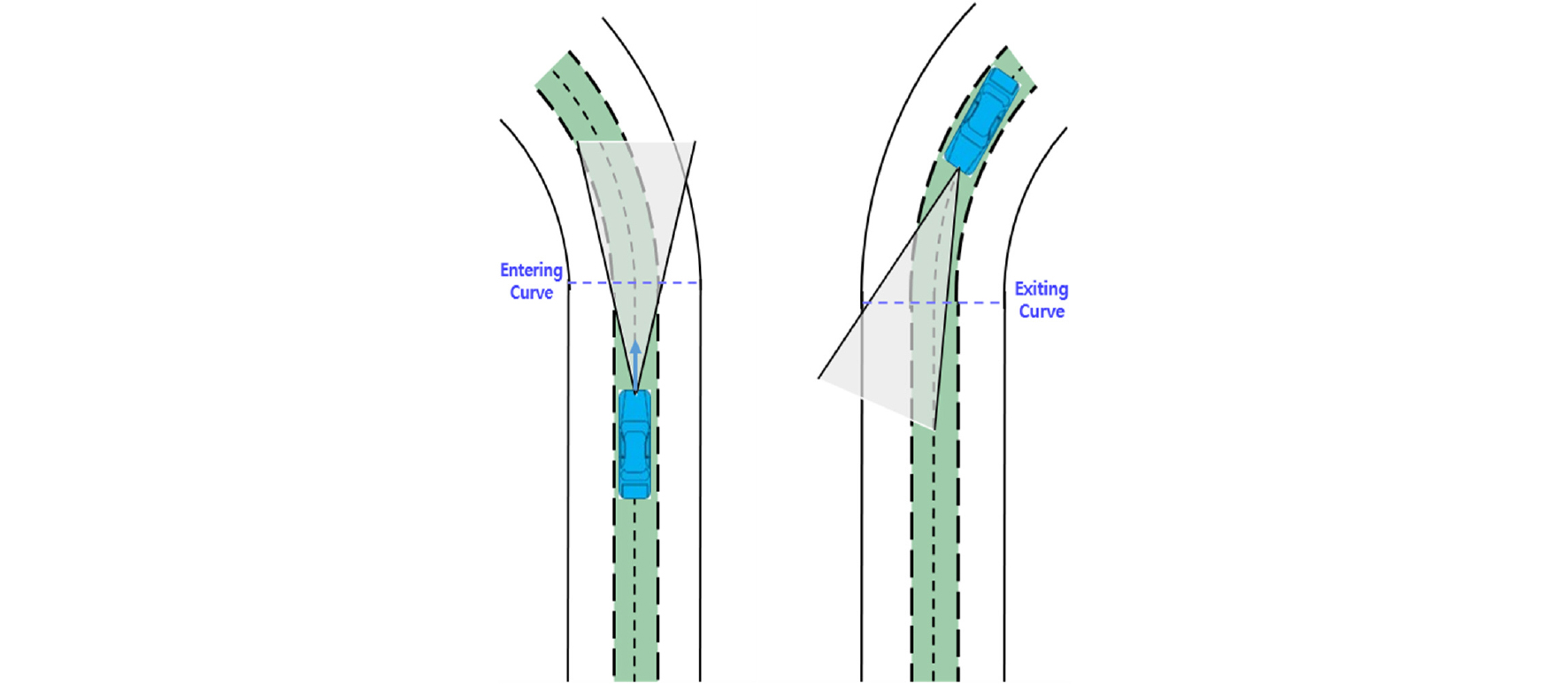
차선 유지는 종방향 제어와 횡방향 제어가 통합적으로 이루어지면서 차선 유지 여부를 평가하는 시나리오이다. 실험로는 Fig. 1과 같은 직선-곡선 변화도로이며 테스트 차량은 속도 0 kph에서부터 시작해 경로를 추종하며 목표 속도 이내를 유지한다. 안전성 평가 항목은 경로 추종, 종방향 가속도, 속도, 승차감이다.
2.1.2. 차선 변경
차선 변경 시나리오는 Fig. 2와 같은 2차선 직선도로에서 진행한다. 테스트 차량이 5초간 약 30 kph까지 가속한 뒤 차선을 변경한 후 직진 이탈하는 시나리오이다. 안전성 평가항목에는 차선 유지 시나리오와 동일하게 경로 추종, 종방향 가속도, 속도, 승차감이 있다. 추가적으로 데이터 분석의 편의성을 높이기 위해 차선 변경 인가 신호 on/off 시점을 확인한다.

2.1.3. 안전거리 유지
안전거리 유지 시나리오는 자율주행 차량이 선행 차량의 속도에 유의해 차간거리를 유지하며 추종하는 시나리오이다. 이 구간은 Fig. 3에 묘사된 바와 같이 동일 차선 내 타겟 차량이 전방에서 속도에 변화를 주면서 교통의 흐름을 구현하고 뒤의 테스트 차량이 타겟 차량을 추종하면서 안전하게 대응하는지 평가한다. 타겟 차량과 테스트 차량은 감속과 가속을 반복하면서 안전거리를 유지해야 한다. 안전성 평가 항목은 타겟 차량과의 종방향 차간 거리, 종방향 가속도, 속도이다.

2.2. 심화 시나리오
기본 성능 외에도 자율주행 차량이 실도로에서 안전하게 주행하기 위해 대응할 수 있어야 하는 긴급상황을 가정해 심화 시나리오로 평가한다. 심화 시나리오에는 Cut-in 차량 대응, 정지 장애물 대응, 횡단 보행자 대응, 차선 변경 불가 상황 대응이 포함된다. 마찬가지로 시나리오와 함께 각 시나리오별 평가항목을 제시한다.
2.2.1. Cut-in 차량 대응 주행
Cut-in 차량 대응 주행은 Fig. 4처럼 2차선 직선도로에서 옆 차로의 타겟 차량이 급하게 테스트 차량의 차선으로 끼어드는 시나리오이다. 타겟 차량은 테스트 차량 기준 옆 차로의 같은 위치에서 함께 출발하여 목표 속도 도달후 10 m 전방에서 테스트 차량의 차선으로 Cut-in 한다. 이때 테스트 차량이 Cut-in 차량에 안전하게 대응하는지 평가한다. 안전성 평가항목은 타겟 차량과의 종방향/횡방향 차간 거리, 종방향 가속도, 속도이다.

2.2.2. 정지 장애물 대응 주행
해당 시나리오에서는 Fig. 5와 같은 직선 경사로 구간에서 테스트 차량의 경로 위에 정지해 있는 타겟 차량을 인지하였을 때 자율주행 차량의 대응을 평가한다. 테스트 차량은 목표 속도에 도달하고 난 뒤 타겟 차량 후방에 안전거리를 유지하여 정차하여야 한다. 안전성 평가 항목에는 타겟 차량과의 종방향 차간 거리, 종방향 가속도, 속도가 있다.

2.2.3. 횡단 보행자 대응 주행
Fig. 6과 같은 직선도로에서 직진하고 있는 테스트 차량의 전방에 도로를 횡단하는 보행자가 등장하는 시나리오이다. 테스트 차량이 목표속도에 도달한 뒤 20 m 전방에서 보행자가 횡단하면 이에 대응해 테스트 차량은 감속해야 한다. 이후 보행자가 횡단하여 차선에서 이탈하면 다시 가속을 시작해 목표속도에 도달한다. 안전성 평가 항목에는 보행자와의 종방향 거리, 횡방향 거리, 종방향 가속도, 속도가 포함된다.

2.2.4. 차선 변경 불가 상황 대응 주행
차선 변경 불가 상황 대응 주행 시나리오는 Fig. 7과 같다. 2차선 직선도로에서 옆 차로의 타겟 차량이 후방에서 가속하여 차선 변경을 시도하던 테스트 차량을 방해한다. 테스트 차량은 차선 변경을 시도하던 도중이더라도 양보 의도가 없는 후방 차량으로 인해 충돌이 예상될 시 다시 기존 차선으로 복귀하여야 한다. 안전성 평가 항목에는 타겟 차량과의 종/횡방향 차간 거리, 종방향 가속도, 속도, 승차감이 있다. 정확한 분석을 위해 시스템의 차선 변경 인가 신호 on/off 시점도 확인한다.

2.3. 안전성·성능 평가요소
7개의 시나리오에서 평가해야 하는 항목의 기준에 대한 구체적인 수치는 Table 1에 제시되어 있다. 경로 추종 항목은 경로와의 횡방향 offset을 근거로 평가하고 속도 항목의 수치는 도심 실도로의 규정 속도를 기준으로 설정하였다.(7) 종방향 가속도는 ISO 기준을 근거로 설정하였으며 타겟 차량과 유지해야 하는 최소 차간 거리는 선행 연구에 기반해 도심 상황에 맞는 파라미터로 설정되었다.(9) 또한, 승차감에 영향을 주는 지표인 조향각, 종방향 가속도, 속도 수치가 수동 주행 데이터와 유사성을 보이는지 판단하여 자율주행 차량의 승차감을 평가하였다.(10,11)
Table 1.
Assessment factors for scenarios
| Assessment factors | Assessment criteria | Basis of foundation |
| Path following | Lateral offset | Lane keeping |
| Velocity | 30 kph ≤ | Urban driving speed(6) |
| Longitudinal acceleration | -3.5 m/s2 < Ax < 2 m/s2 | ISO standards (LKAS)(8) |
| Safe distance | Clearance > 4 m + vehicle length | Previous research(9) |
| Drive comfort | Similarity to manual driving | Data from manual driving |
3. 시나리오 구현
3.1. 실도로 주행 기반 시나리오 구현
본 논문에서 제안한 자율주행 안전성 평가 시나리오는 기본 평가 시나리오 3개와 심화 평가 시나리오 4개이다. 시나리오 검증을 위해 서울대학교 미래모빌리티연구센터(FMTC)의 시험 트랙을 이용해 실차 실험을 진행하였다. 해당 트랙에는 교차로, 경사로와 같은 도심의 실도로 환경이 구현되어 있고 실험이 진행된 시나리오별 트랙 구간은 Fig. 8과 Table 2에 제시되어 있다. 평가받는 자율주행 테스트 차량 외에도 시나리오를 구현해주는 타겟 차량/보행자가 필요하다. 모든 시나리오는 동일한 테스트 차량을 이용해 수동/자율주행 모드로 두 번씩 테스트 되었다.

Table 2.
Implemented scenarios
| Number | Scenario | |
| Basic scenario | ① | Lane-keeping |
| ② | Lane-change | |
| ③ | Clearance control | |
| Advanced scenario | ④ | Cut-in |
| ⑤ | Static obstacle | |
| ⑥ | Pedestrian | |
| ⑦ | Lane-change abort |
3.2. 자율주행 차량 구성
본 논문에서 제안한 평가 시나리오들을 검증하기 위해 실제 자율주행 차량을 이용하여 실차 실험을 진행하였다. 사용된 자율주행 차량의 기본 구성은 Fig. 9와 같다. 주변 환경 인지를 위해 카메라, Lidar가 사용되었다. 카메라는 보행자 및 전방 주행 차선을 인지, Lidar는 장애물과 지형을 인지한다. 인지된 정보를 바탕으로 컴퓨터 및 Autobox를 이용해서 판단 및 요구 제어값을 결정하고 조향, 가감속 제어를 통해 자율주행을 한다.

4. 시나리오 검증
본 논문에서 제안한 시나리오의 적정성을 평가하기 위해 실제 테스트 트랙에서 실차 실험을 진행하였다. 동일한 테스트 차량으로 수동 주행과 자율 주행을 번갈아 시험하며 모든 시나리오는 성공적으로 수행되었고 시나리오의 실차 결과 예시는 다음과 같다.
4.1. 기본 시나리오 검증
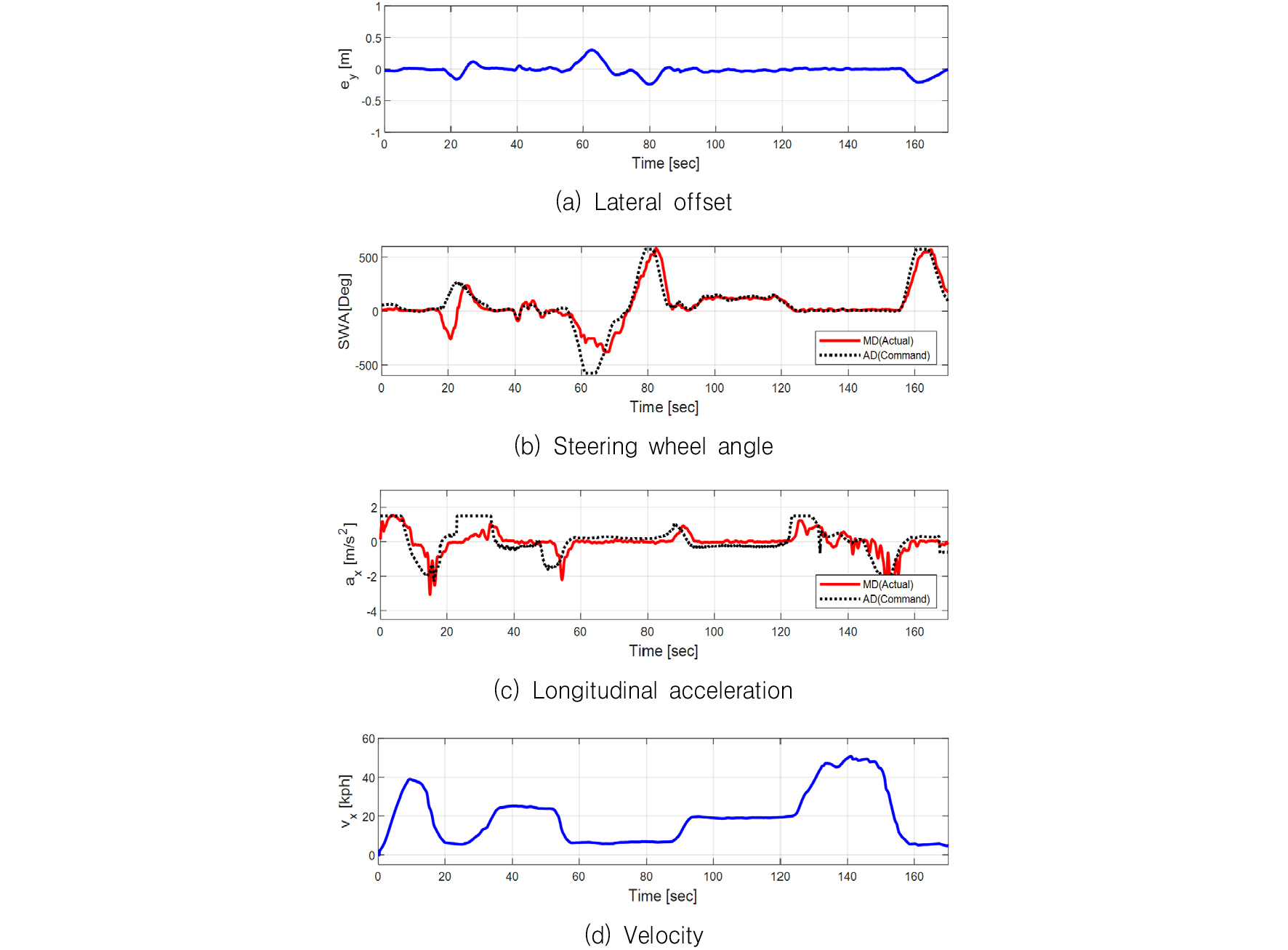
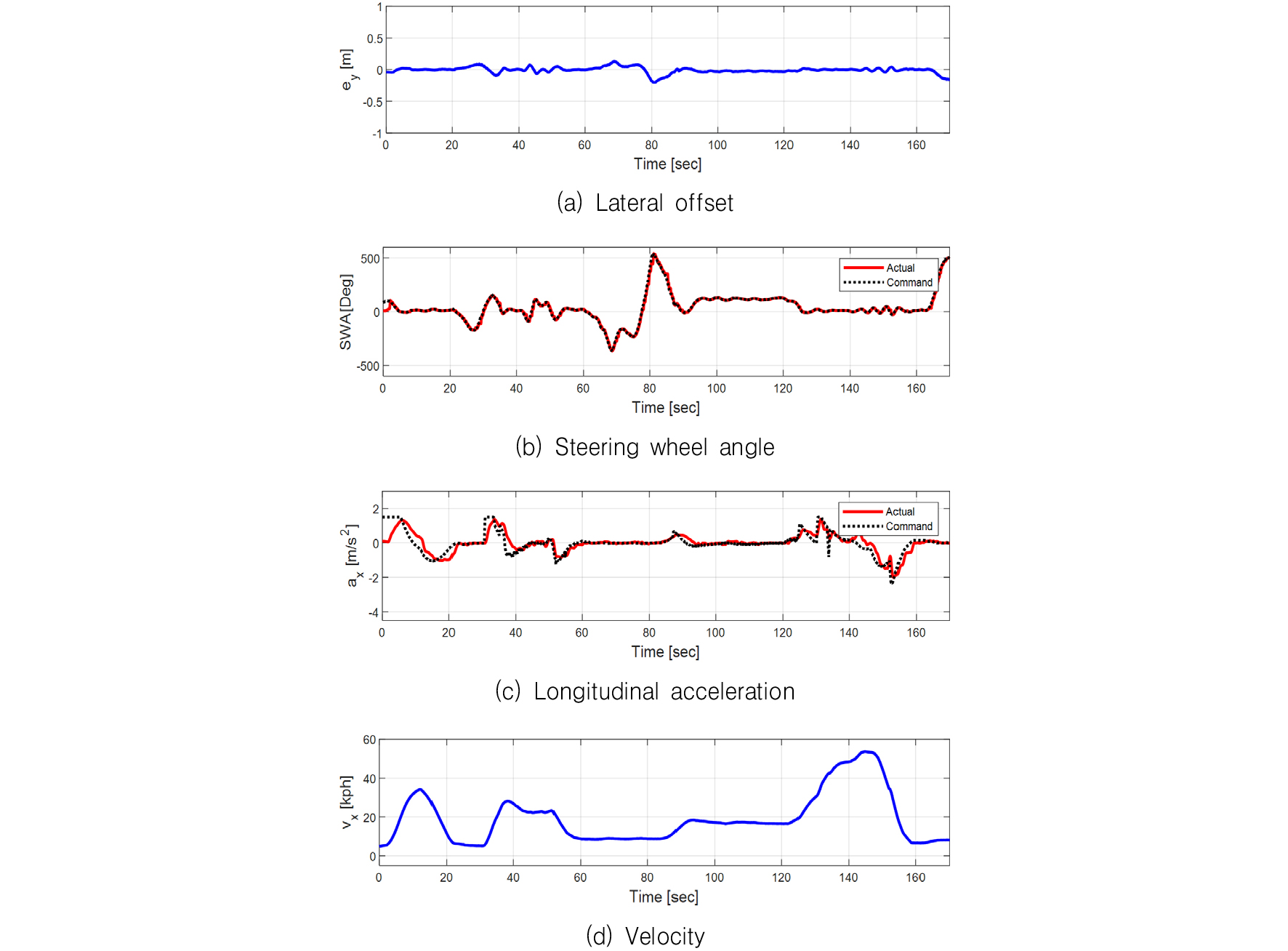
Fig. 10은 2.1.1 차선 유지 시나리오에서 운전자가 직접 테스트 차량을 수동으로 운전해 시나리오를 수행한 실차 데이터이고 Fig. 11은 동일한 차선 유지 시나리오를 자율주행 모드로 수행한 데이터이다. 테스트 차량의 목표 속도는 50 kph로 설정되었고 평가항목은 위에서 언급됐듯이 경로 추종, 승차감, 종방향 가속도, 속도이다. Figs. 10~11의 (a)를 보면 횡방향 offset을 통해 경로 추종을 평가할 수 있다. 수동 주행, 자율 주행 모두 곡률이 커지는 구간에서도 차선을 준수하게 유지하였고 특히 자율주행의 횡방향 offset이 수동 주행보다 전체적으로 낮은 것을 확인하였다. 조향각 (b) 항목과 종방향 가속도 (c), 속도 (d) 항목을 전체적으로 비교하였을 때도 유사한 거동을 보여 자율주행 테스트 차량의 승차감이 수동주행에 뒤처지지 않고 성능도 안정적인 것을 확인할 수 있다. 또한, Fig. 11의 (c), (d)를 통해 종방향 가속도는 -3.5 m/s2 < Ax < 2 m/s2 사이의 값을 유지하고 속도는 30 kph ≤ Vx < 60 kph를 준수하며 안전성 평가 요소에 부합하게 주행하는 것을 볼 수 있다.
4.2. 심화 시나리오 검증
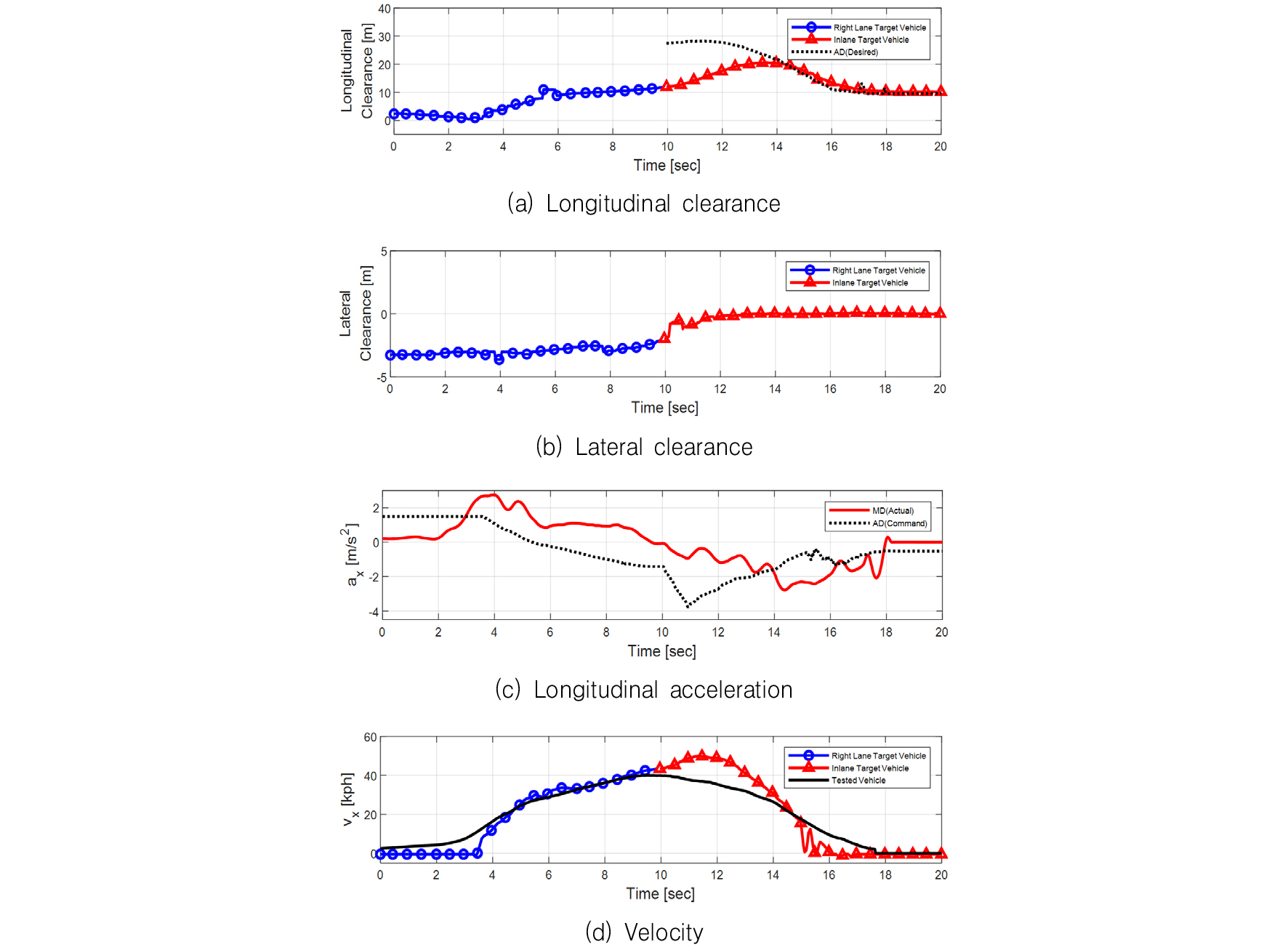
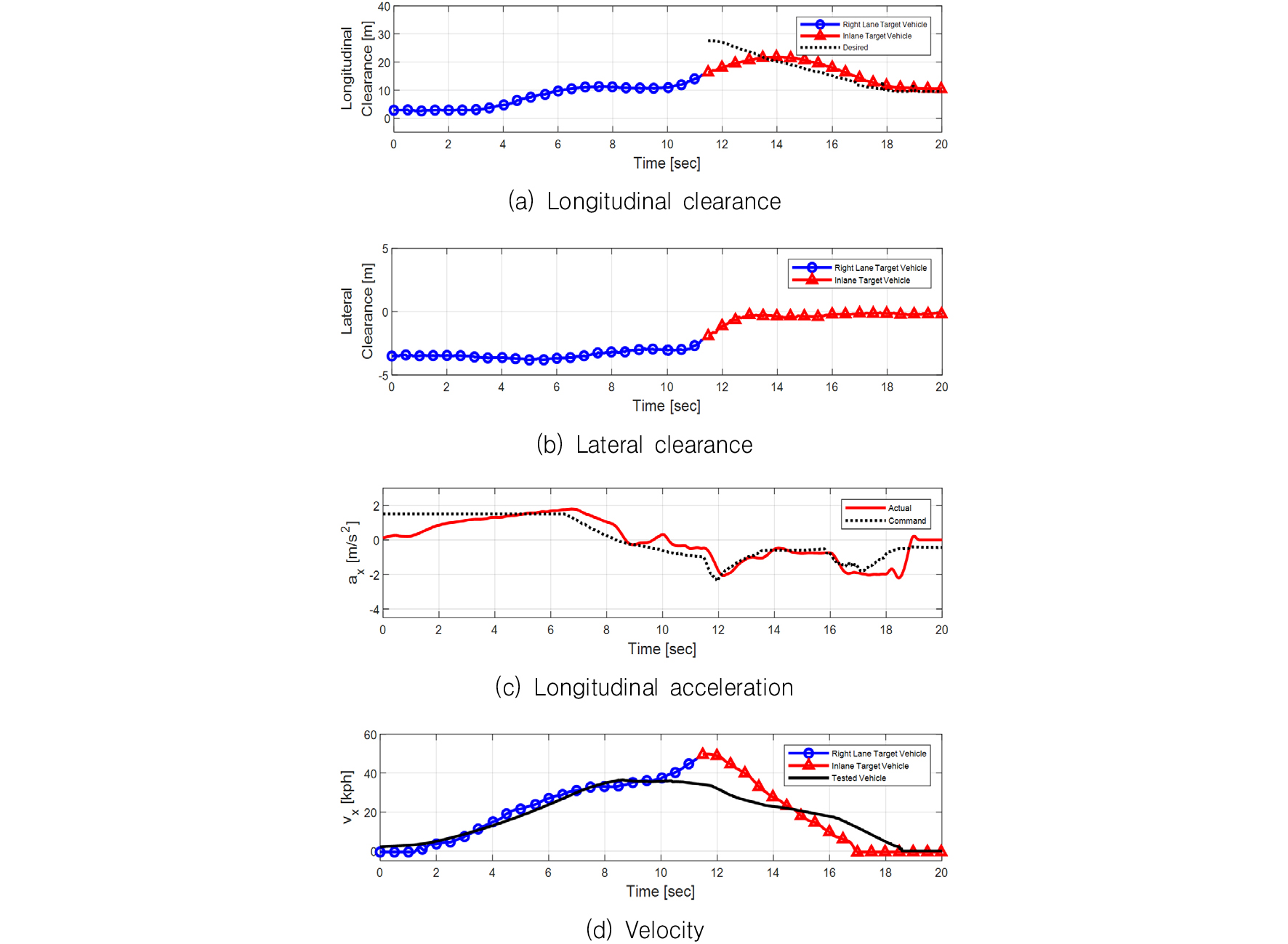
Fig. 12와 Fig. 13은 각각 2.2.1 Cut-in 차량 대응 주행 시나리오의 수동 주행, 자율 주행 실차 데이터이다. 타겟 차량과의 종방향 거리를 나타낸 (a)와 횡방향 거리를 나타낸 (b)를 보면 타겟 차량이 수동 주행의 경우 10초, 자율주행의 경우 11초 부근에 Cut-in을 하여 Inlane 타겟으로 잡히는 것을 알 수 있다. 이에 대응해 테스트 차량이 빠르게 감속하여 안전 거리를 확보하는 것을 (a), (c), (d)로 확인하였다. Fig. 13의 (a), (b), (c), (d)를 통해 안전성 평가 요소에 부합하게 차간 거리, 종방향 가속도, 속도가 유지되는 것을 볼 수 있다.
5. 결 론
본 연구에서는 자율주행 차량의 실도로 주행을 위한 평가 시나리오를 제안하였다. 평가 시나리오는 크게 기본 성능을 검증하는 기본 시나리오 3개와 도심 상황을 재현한 심화 시나리오 4개로 구성된다. 평가를 받는 테스트 차량 외에도 타겟 차량과 보행자를 이용하여 Cut-in이나 횡단하는 보행자와 같은 도심 상황을 연출할 수 있도록 하였다.
시나리오와 함께 각 시나리오별 안전성 평가항목을 명시하였다. 평가항목의 달성 여부를 통해 시나리오의 합격 여부를 정한다. 시나리오 및 평가항목 기준은 ISO 표준 기준과 운전자 데이터, 현존하는 교통 법규를 참조하였다.
개발한 자율주행 안전성 평가 시나리오 및 평가항목의 적정성을 검증하기 위해 서울대학교 시흥캠퍼스 미래모빌리티연구센터(FMTC) 테스트 트랙에서 실차 실험을 진행하였다. 테스트 차량은 시나리오를 각각 수동/자율주행 모드로 두 번씩 수행하여 데이터를 수집하였고 오프라인 시뮬레이션을 통해 안전성 평가 기준을 만족하는 것을 확인하였다. 검증 결과 평가 기준들은 합리적이라고 볼 수 있었다.
본 연구의 기대효과는 추후에 개발될 여러 자율주행 차량의 평가를 위해 사용될 수 있다. 자율주행 차량이 실제 도로에서 주행하기 전에 충분한 사전 안전성 평가가 필요하므로 자율주행 차량의 임시운행 허가나 상용화 단계에서 큰 기대효과를 얻을 수 있다. 본 연구의 향후 연구로는 도심 환경의 교차로, 차선 합류 및 분기점 등 더 다양한 도로 상황의 시나리오 개발이 필요하다.
