1. 서 론
2. 종 방향 가속도 제어기 구조
2.1. 목표 가속도 필터 (Desired acceleration filter)
2.2. 가속도 추정기 (Accelertaion estimator)
2.3. 피드백 제어 명령 초기화 알고리즘
2.4. 제로 스로틀 알고리즘(파워트레인 특성 반영)
2.5. 피드포워드 및 피드백 제어기
2.6. 상태 기계(state machine) 기반 스위칭 알고리즘
3. 종 방향 가속도 제어기 실차 적용 절차
3.1. 실차 로직 적용 절차
3.2. 파라미터 선정 예시
4. 종 방향 가속도 제어기 성능 검증
4.1. 시뮬레이션 테스트
4.2. 실차 테스트
5. 결 론
부록 1: 시뮬레이션 테스트 결과
부록 2: 실차 테스트 결과
1. 서 론
오랜 기간 자동차 관련 기술을 개발해오던 기업들뿐만 아니라, 엄청난 규모의 대기업과 중소기업들이 자율주행차 기술 개발에 뛰어들기 시작하면서 자율주행 기술이 빠른 속도로 발전하고 있다.(1) 각 기업들은 멀지 않은 미래에 완전자율주행차를 완성하여 출시할 것이라는 목표를 내세우고 있는 상황이다. 자율주행차가 상용화되어 전 세계에 보급되는 과정에서 셀 수 없는 자율주행차가 생산될 것으로 전망된다. 따라서 이제 자율주행기술은 연구실 수준에서 적은 수량의 차량에만 적용 가능한 방식으로 개발되어서는 안된다. 특히 종 방향 가속도 제어 알고리즘은 모든 자율주행차량에 필수적이지만,(1) 차량 특성이 조금만 달라지더라도 성능에 큰 영향을 받는다. 동일한 모델의 자율주행차 일지라도 차량의 동역학적 특성, 제어 인터페이스 특성, 알고리즘 입력 정보를 제공해주는 센서의 상태 등에 따라 종 방향 제어 성능이 크게 영향을 받는다. 알고리즘이 적용되는 차량의 종류나 모델이 달라지고, 인터페이스가 달라질 때마다 엄청난 시간이 소요되는 튜닝 과정을 거처야만 종 방향 제어 성능이 나올 수 있다면, 생산하는 자율주행차량의 수가 증가함에 따라 막대한 비용이 야기될 것이다. 또한, 차량 모델에 대한 정보가 주어진 경우에만 적용 가능한 알고리즘은 생산 과정에서 약간의 변경만으로도 큰 비용을 필요로 하는 계측이 다시 이루어져야 하며, 모델 정보에 대한 접근이 힘들거나 차량 상태가 변한 경우에도 대응이 어렵다. 따라서 차량 모델이 주어지지 않더라도 적은 비용의 실험만으로 다양한 자율주행차량에 적용될 수 있는 종 방향 제어 알고리즘과 그 적용 절차에 대한 개발이 필요하다.
Sungwoo CHOI(1)는 차량 모델이 주어지지 않더라도 적용 가능한 종 방향 제어 알고리즘에 대해 연구를 진행하였다. 하지만 해당 연구의 알고리즘은 특정 제어 인터페이스에만 적용 가능한 구조이며, 튜닝 시나리오가 명확하지 않고 실차에서의 성능 검증이 이루어지지 않았다.
Michel Fliess(2)는 차량 모델 없이 직관적인 튜닝 과정으로 통해 적용 가능한 intelligent PID 제어기를 제안하였다. 제시된 제어기에서는 미분항을 제어 입력 결정에 사용하는데, 이는 실차에 적용할 때 다양한 문제를 야기할 수 있는 구조이다. 현실적으로 측정되는 미분항은 부정확하고 값이 크게 튀는 순간이 자주 발생하기 때문이다. 해당 연구에서도 실차에서의 검증이 이루어지지 않았다. 또한 Michel Fliess가 제안한 알고리즘은 오로지 오차에만 의존하는 제어기이기 때문에 반응속도에 한계가 있는 구조이다. 따라서 급정거 상황에서도 안정적으로 적용되기 어렵다.
본 연구에서는 5,6번 정도의 간단한 실험(스텝 입력에 대한 차량 가속도 측정)을 통해 차량 모델에 상관없이 적용 가능한 종 방향 가속도 제어기를 제안한다. 적용은 간단하지만 속도 편향, 도로 경사 등의 오차를 보상할 수 있으며, 실제 자율주행에서 발생할 수 있는 기술적인 문제에도 대응할 수 있는 구조로 개발하였다.
2. 종 방향 가속도 제어기 구조
본 연구에서 제안하는 종 방향 가속도 제어기의 구조는 Fig. 1~2와 같다.

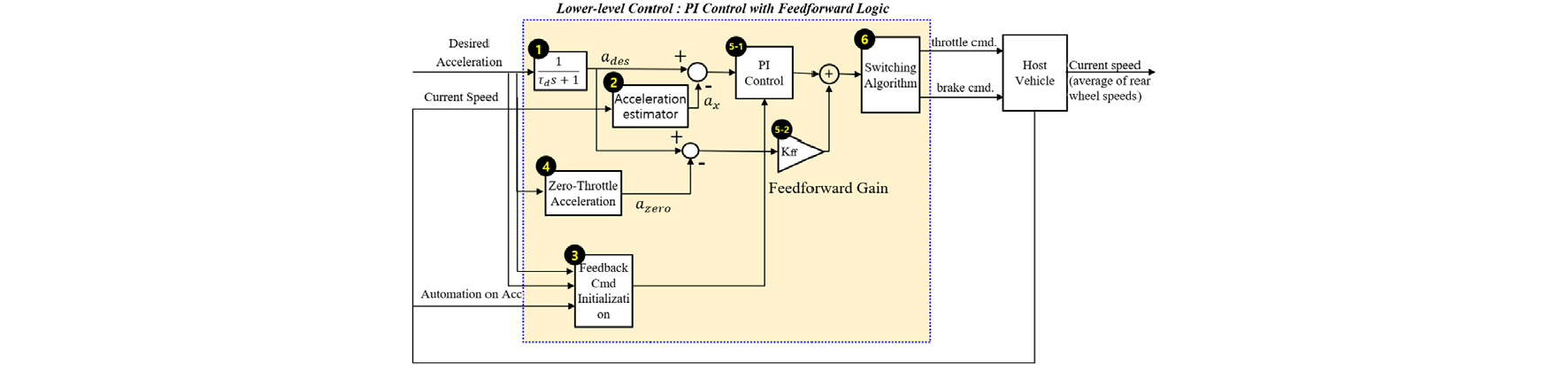
자율주행 차량의 인지 및 판단 알고리즘을 바탕으로 결정되는 목표 가속도를 추종하는 것이 기본 구조이다.본 연구에서 제안하는 알고리즘은 크게 6개의 모듈로 구성되어 있으며, 각각의 입력과 출력 및 서로 간의 관계는 Fig. 2와 같다.
2.1. 목표 가속도 필터 (Desired acceleration filter)
인지 정보를 바탕으로 상위 제어 알고리즘이 결정한 목표 가속도를 입력으로 받아 추종하기 전에 필터링을 해주는 모듈이다. 상위 제어 알고리즘의 성능이 극단적이지 않은 일반적인 경우에는 차량의 종류와 상관없이 0.1 값을 사용한다.
2.2. 가속도 추정기 (Accelertaion estimator)
차량 Chassis CAN 또는 IMU 센서에서 측정되는 가속도 값을 바로 사용하는 경우, 차량 pitch angle로 인한 중력 값이 포함되므로 실제 차량의 진행방향에 대한 가속도 값이 아니다. 차량의 휠속 센서 값으로 부터 차량의 진행 방향에 대한 가속도 값을 추정하여 사용하기 위한 IIR 필터이다. 구체적인 계산식은 식 (1)과 같다.
여기서 α는 차량에 상관없이 0.9라는 고정 값을 사용한다. 중대형 차량의 경우, 가속 및 감속 상황이나 도로 형태에 따라 pitch angle로 인한 성능 저하가 발생하기 쉽다. 위와 같은 형태의 가속도 추정기를 통해 pitch angle로 인한 이슈를 완화한다.
2.3. 피드백 제어 명령 초기화 알고리즘
차량이 정차하는 상황에서 I-gain 값이 포화되므로, 정차 후 빠른 출발을 위해 gain 값을 초기화해주는 알고리즘이다. 구체적인 알고리즘은 Table 1과 같다.
Table 1.
Feedback cmd initialization description
Table 1에 기입되어 있는 알고리즘의 출력인 “reset_signal”은 뒤에서 언급될 피드백 제어기의 입력으로 들어간다. “reset_signal”의 값이 증가할 때마다 피드백 입력 중 I-gain의 값을 0으로 초기화해주어 자율주행차가 정차 후 빠른 출발을 할 수 있도록 한다.
2.4. 제로 스로틀 알고리즘(파워트레인 특성 반영)
제어 입력이 없을 때 자연적으로 발생하는 가속도가 존재하며 이를 제로 쓰로틀 가속도(zero-throttle acceleration)이라고 한다. 이를 피드포워드 개념으로 소거해주기 위한 모듈이다. Zero-throttle acceleration 은 식 (2)와 같이 계산하며 이는 선행 연구를 참고하였다.(4)
2.5. 피드포워드 및 피드백 제어기
구동 입력과 제동입력은 필터링 된 목표 가속도, 추정된 내 차량 가속도, 제로 쓰로틀 가속도를 바탕으로 식 (3)의 형태로 계산된다.
식 (3)에서 1은 구동을 2는 제동을 의미하는 첨자이다. 식 (3) 형태에서 생기는 튜닝 파라미터는 구동과 제동에서 각각 3개씩이다. 동시에 3개의 파라미터를 실차에서 튜닝하는 것은 상당히 번거로운 일이다. 본 연구에서는 피드포워드 게인만을 실차 주행을 통해 튜닝하고 나머지 2개의 피드백 게인은 이론적 배경과 시뮬레이션을 통해 피드포워드 게인의 상수 곱으로 정의하는 방법론을 제안하다. 또한 각각의 피드포워드 게인을 선정하는 방식도 실차에서 빠르고 간단하게 선정할 수 있는 방법론을 제안한다.
바퀴 슬립이 없거나 매우 적고 바퀴의 관성 역학을 무시할 수 있다고 가정하면, 차량 종 방향 운동 방정식은 식 (4)와 같이 표현할 수 있다.
구동 입력과 제동 입력에 따른 토크를 정확히 모델링 하기 위해서는 엔진, 회전력 변환 장치, 변속기 등에 대한 동역학 정보를 알 수 있어야 한다. 신뢰할 수 있는 정확한 모델과 그 값을 얻는 것은 상당히 번거로운 일이다. 여러 차량에 쉽게 적용할 수 있는 구조로 적용하기 위해서 피드포워드 항을 계산할 때에는 입력과 바퀴 토크가 선형관계를 가진다고 가정하도록 하겠다. 해당 가정으로 인해 발생하는 오차는 피드백 제어 입력을 통해 보상한다. 결과적으로 식 (4)는 식 (5)와 같이 표현될 수 있다.
식 (5)에서 기어는 3단 혹은 그 이상이라고 가정하였으며, 기어의 단변화는 일어나지 않는다고 가정하였다. 식 (3)의 형태로 구동 입력만을 가해주고 피드백 입력으로 Δazero를 완전히 상쇄시켰다고 가정하면 식 (5)는 식 (6)과 같은 형태로 정리될 수 있다.
제동 입력만 가해지는 상황에서도 동일한 식 전개가 가능하다. 따라서 목표 가속도를 추종하기 위한 구동 및 제동 입력의 피드포워드 게인은 식 (7)과 같다.
즉, 식 (5)에 의해서 Kff1는 속력이 5kph~10kph(azero≈0m/s2)일 때, 1m/s2의 가속도를 발생시키는 구동 입력과 같은 값을 가진다. 동일하게 Kff2는 5kph~10kph일 때, -1m/s2의 감속을 발생시키는 제동 입력과 같은 값을 가진다. 본 연구에서는 시뮬레이션 및 여러 번의 걸친 실차 적용 경험에 기반하여, Kff1는 0.6m/s2의 가속을 발생시키는 구동 입력, Kff2는 -1.9m/s2의 감속을 발생시키는 제동 입력을 사용하는 것을 제안한다. 이는 피드포워드 항이 목표 가속도 추종에 너무 많은 비중을 차지하는 경우, 액츄에이터 지연으로 인해 생기는 오차가 제어 입력에 더해져 잦은 overshoot 이 발생하는 것을 막기 위함이다. 다만, 제동의 경우, 긴급 제동 상황을 대비하여 피드포워드 항의 비중을 좀 더 크게 하였다.
피드백 입력은 P-gain 값과 I-gain 값으로 구성된다. P gain은 피드포워드 항의 오차를 보상한다. 피드포워드 항을 가장 일반적인 상황에 맞춰 정의하였기 때문에 차량의 속도, 기어 단, 제어 인터페이스의 비선형성 등으로 인해 오차가 발생할 수 있다. P-gain은 피드포워드 항의 오차로 인해 발생하는 제어 입력 오차를 30% 까지 보상하는 역할을 하도록 설계하였다. 식 (8)에 의해 KP1, KP2는 각각 Kff1, Kff2에 의해 정의될 수 있다.
피드포워드 항의 오차로 인해 목표 가속도 추정 오차가 발생한 직후 대한 식이며, 따라서 시간 간격이 매우 작아 오차의 적분항과 azero-ax은 무시할 수 있을 만큼 작다고 가정하였다.
I-gain 값은 도로 경사와 바람과 같은 외란에 의한 오차를 보상한다. 일반적인 도심 주행 상황에서 마주할 수 있는 가장 극심한 상황에 대해서도 10초 안에 오차가 보상될 수 있도록 I-gain을 설정하였다. 이때 제동 입력의I-gain은 식 (9)에 의해 Kff2, KP2로 부터 정의할 수 있다.
도로 경사는 15% 내리막이고, 차량 속도 50kph, 바람은 맞바람으로 10m/s로 불고 있는 상황에 대해서 식(9)의 양변을 미분하여 정리하면 식 (10)과 같다.
구동 입력에 대해서도 동일하게 식을 전개할 수 있다. 따라서 본 연구에서는 식 (11) 같이 정의하는 것을 제안한다.
본 연구에서 제안하는 피드포워드 및 피드백 제어 입력의 게인 값을 정리하면 Table 2와 같다.
Table 2.
Proposed parameters definition of controller
| Type | Definition |
| Kff1 | u1(ax=0.6m/s2, vx=5kph) |
| Kff2 | u2(ax=-0.9m/s2, vx=5kph) |
| KP1 | 0.3Kff1 |
| KP2 | 0.3Kff2 |
| KI1 | 0.5(Kff1+KP1)=0.65Kff1 |
| KI2 | 0.5(Kff2+KP2)=0.65Kff2 |
Table 2와 같이 파라미터를 정의함으로써 간단한 실험을 통해 피드포워드 게인 값을 선정할 수 있음과 동시에 나머지 모든 파라미터를 결정할 수 있다.
2.6. 상태 기계(state machine) 기반 스위칭 알고리즘
구동과 제동 모드 변환을 결정하기 위한 모듈이다. 상태 기계(state machine)기반으로 설계하여 잦은 모드 변환으로 인한 chattering 현상을 방지하였다. 또한 또한 제어 입력의 threshold를 설정하여 아주 작은 입럭은 차량에 가해지지 않도록 하여 불필요한 잦은 개입이 없도록 하였다. 알고리즘의 구조는 Fig. 3과 같다.

3. 종 방향 가속도 제어기 실차 적용 절차
3.1. 실차 로직 적용 절차
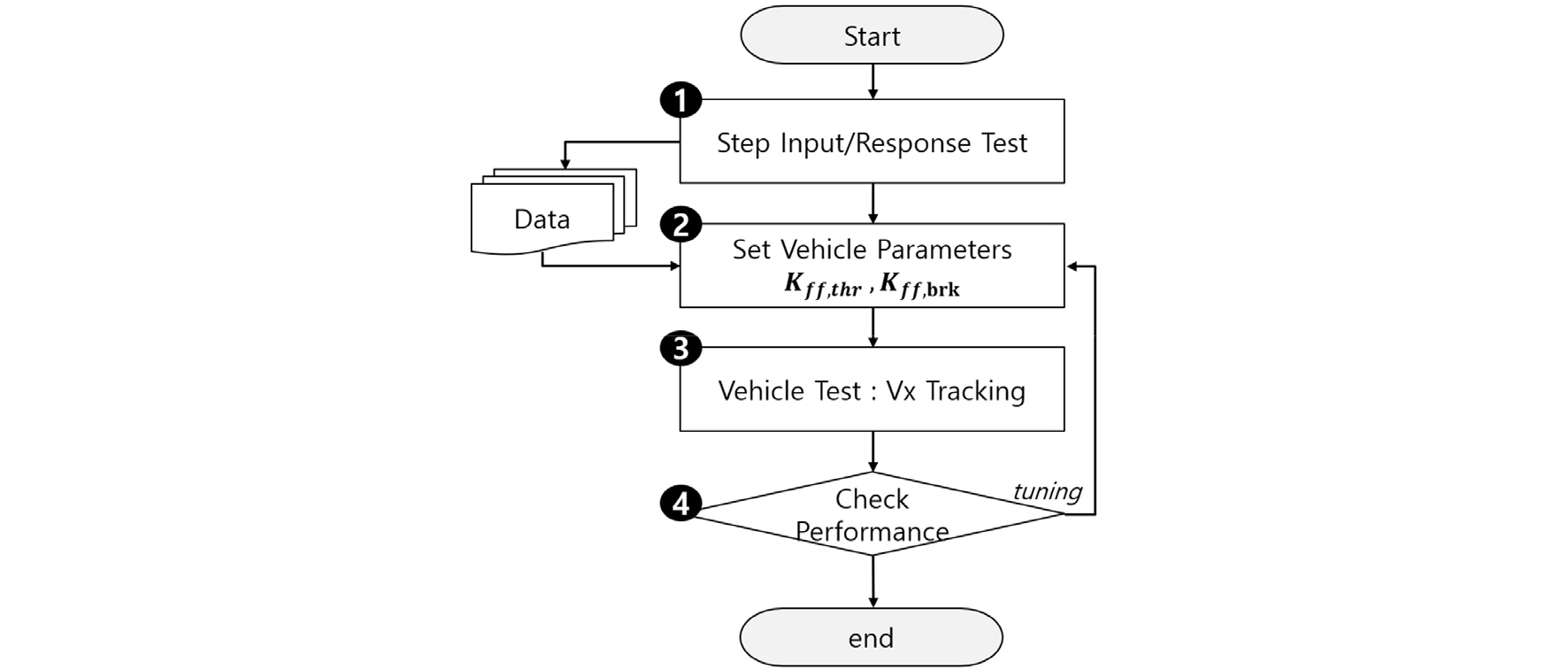
Table 2에서 정의된 대로 피드포워드 게인과 피드백 게인을 선정한다. 이는 5~6번의 Step Input/Response test를 통해 도출될 수 있다. 도출된 파라미터를 로직에 대입한 상태에서 주행 실험을 하여, 세부 튜닝을 진행한다. 예를 들어 구동력이 부족한 경우에는 Kff1을 값을 키우고, 제동력이 부족한 경우에는 Kff2값을 키울 수 있다. 본 연구에서 제안하는 종 방향 가속도 제어기를 실차에 적용하는 과정을 도식화하면 Fig. 4와 같다.
3.2. 파라미터 선정 예시
피드 포워드 게인은 간단한 step input response test를 통해 선정할 수 있다. Fig. 5~Fig. 6은 Accelerator 및 Brake Pedal 제어 인터페이스로 구성된 HMC Solati 차량에 대해 테스트를 진행할 결과이다.
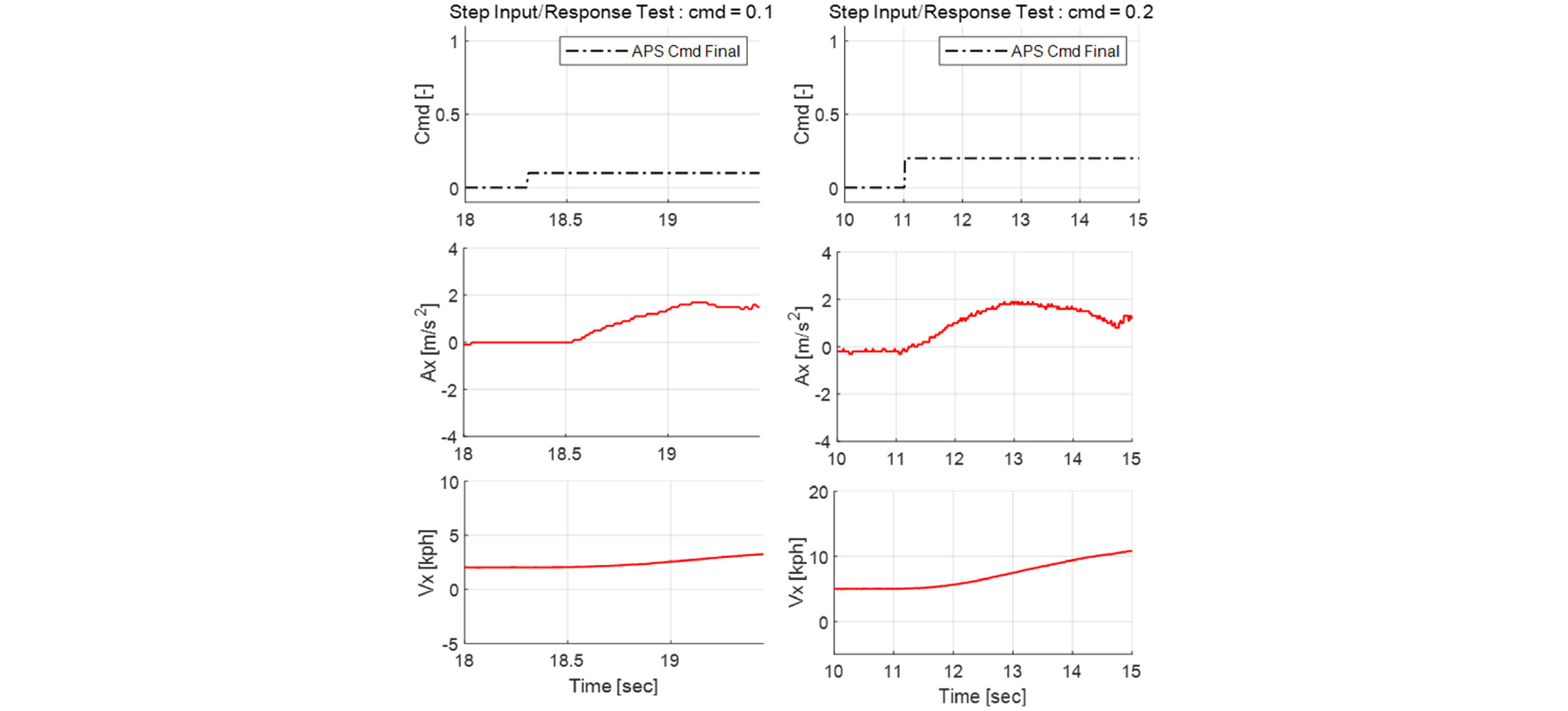
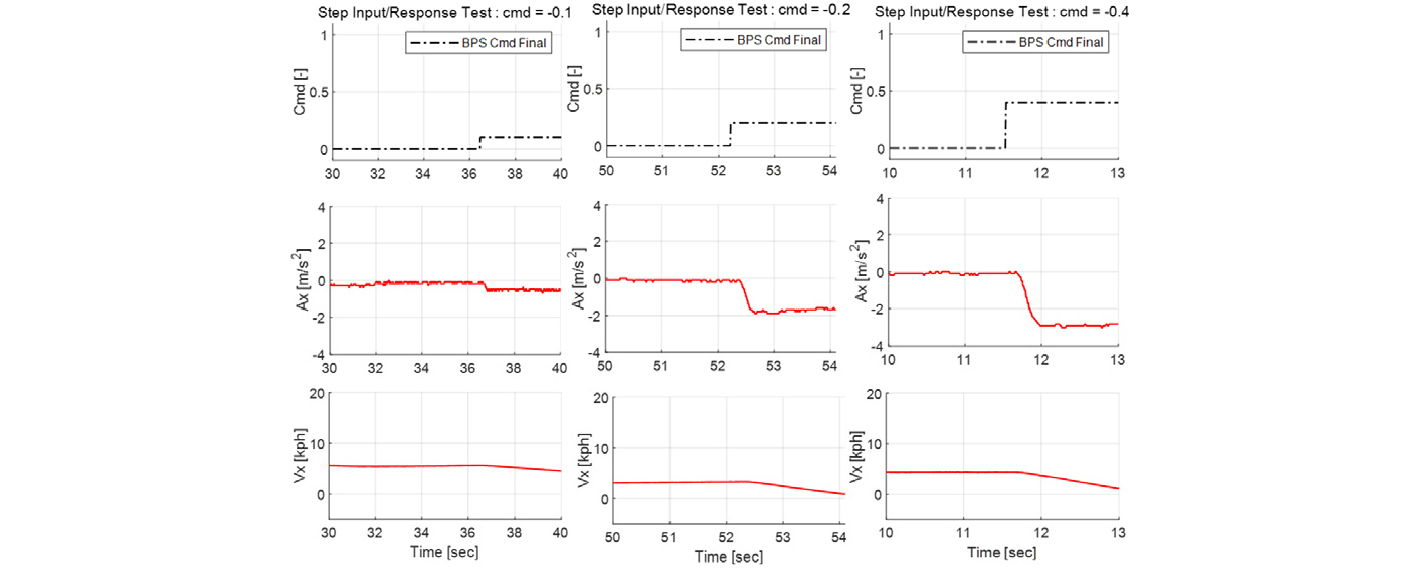
테스트 결과에서 선형 보간법을 통해 앞서 정의한대로 피드포워드 게인을 선정할 수 있다. Fig. 7은 게인 선정 예시이다.

4. 종 방향 가속도 제어기 성능 검증
4.1. 시뮬레이션 테스트
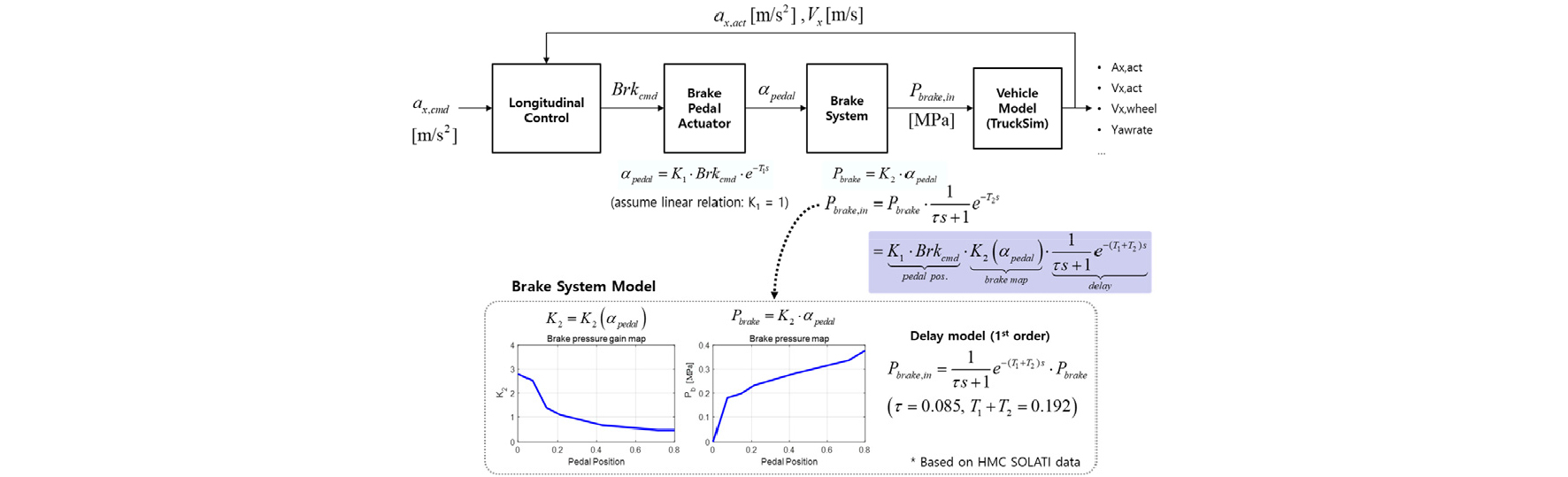
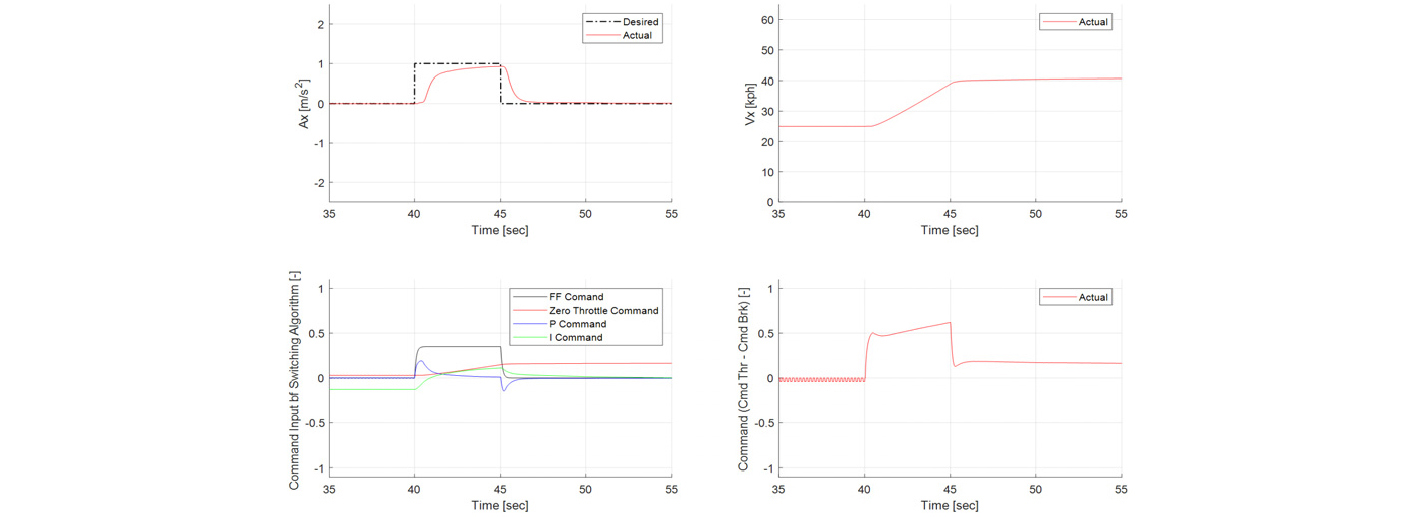
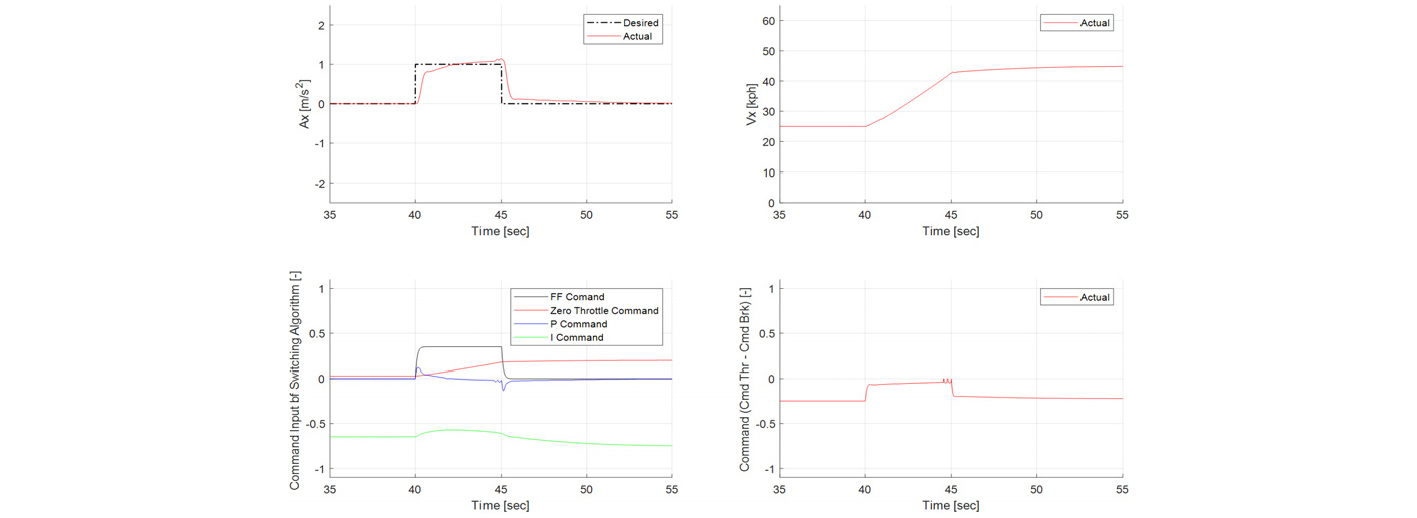
Matlab/Simulink와 Trucksim의 European Ben 모델을 통해 시뮬레이션을 진행하였다. Motor로 Pedal Position을 제어하는 인터페이스 구성으로 가정하였다. 브레이크 페달 인터페이스와 브레이크 시스템은 각각 Dead time delay 가 있는 1차 전달함수 형태로 모델링하였으며, 각각의 계수는 실차 실험 결과를 바탕으로 선정하였다. 제동 제어에 대한 시뮬레이션 구조는 Fig. 4와 같다.
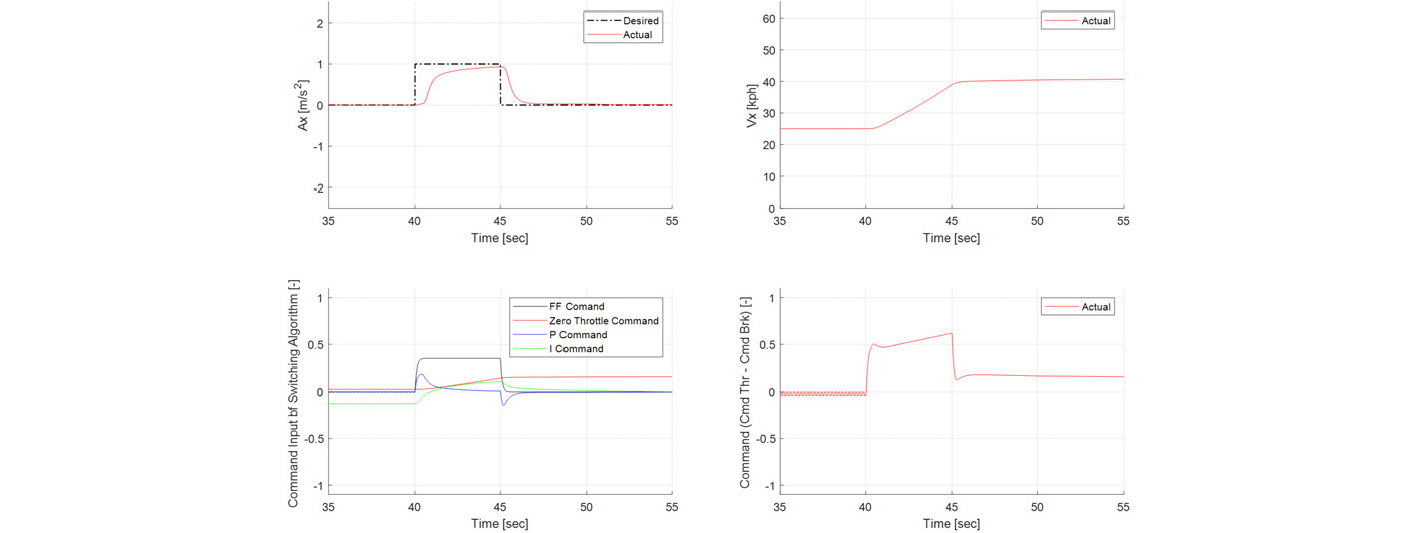
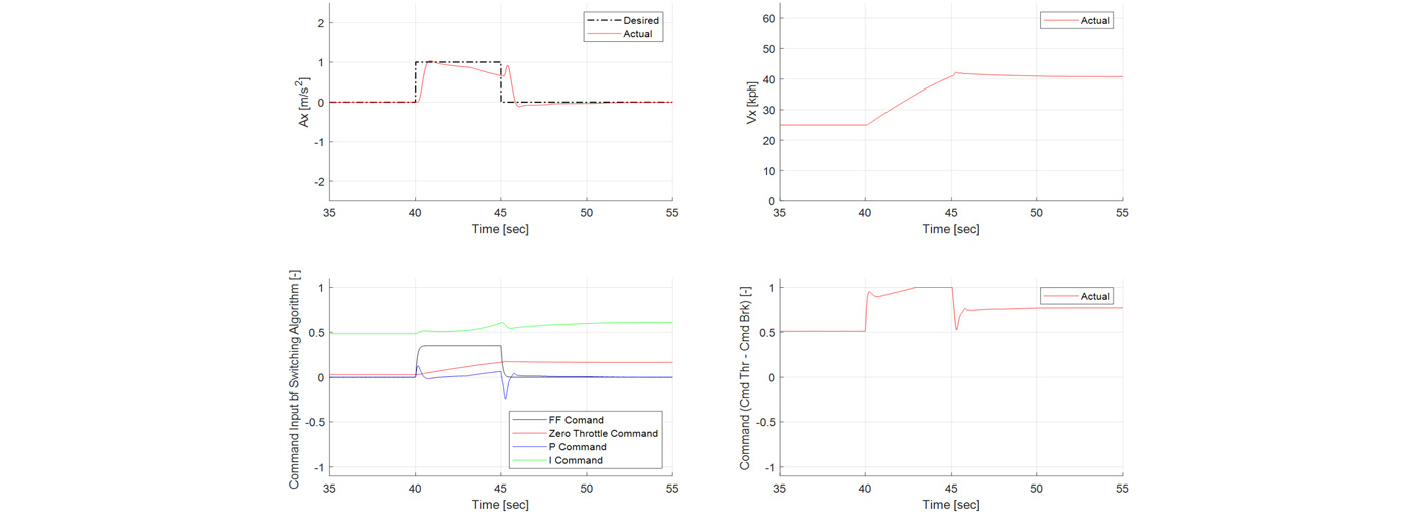
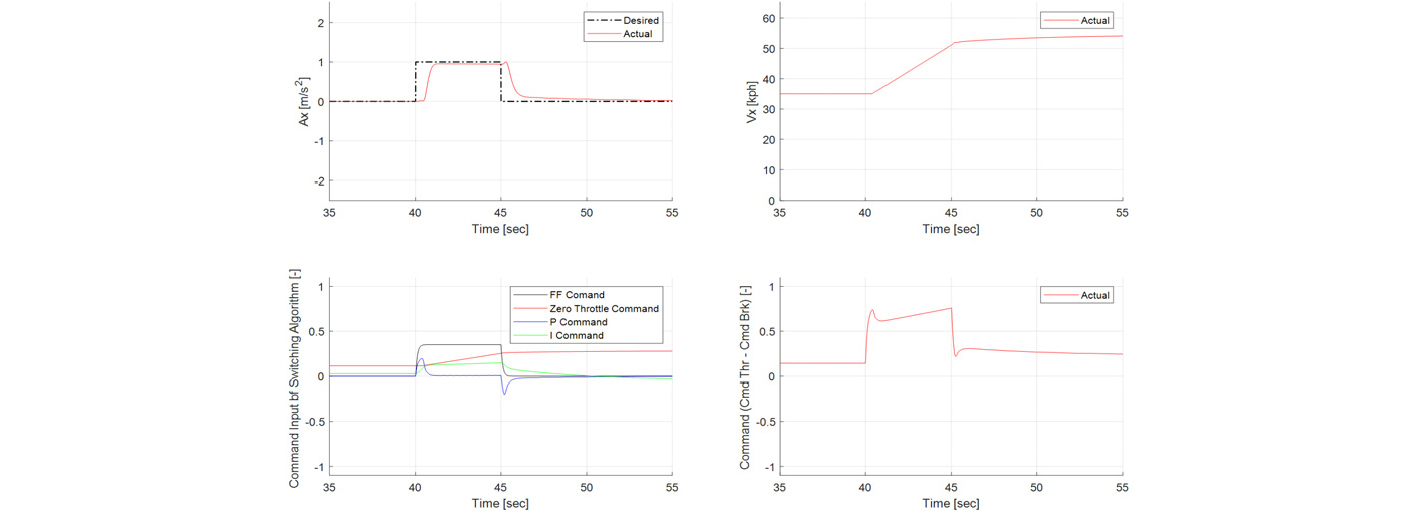
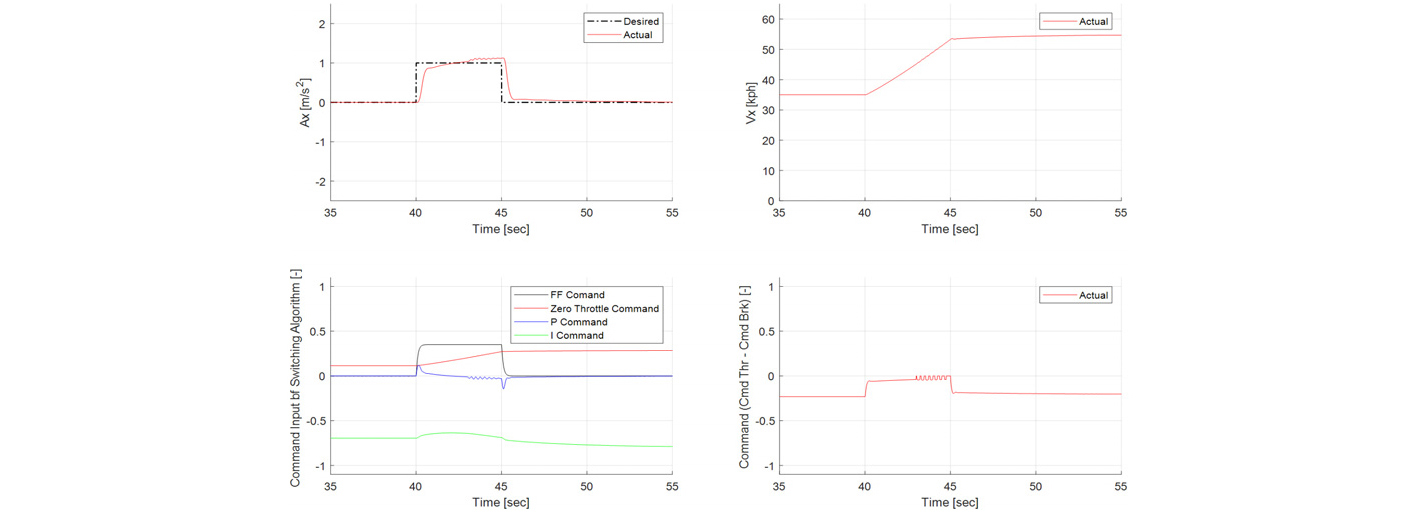
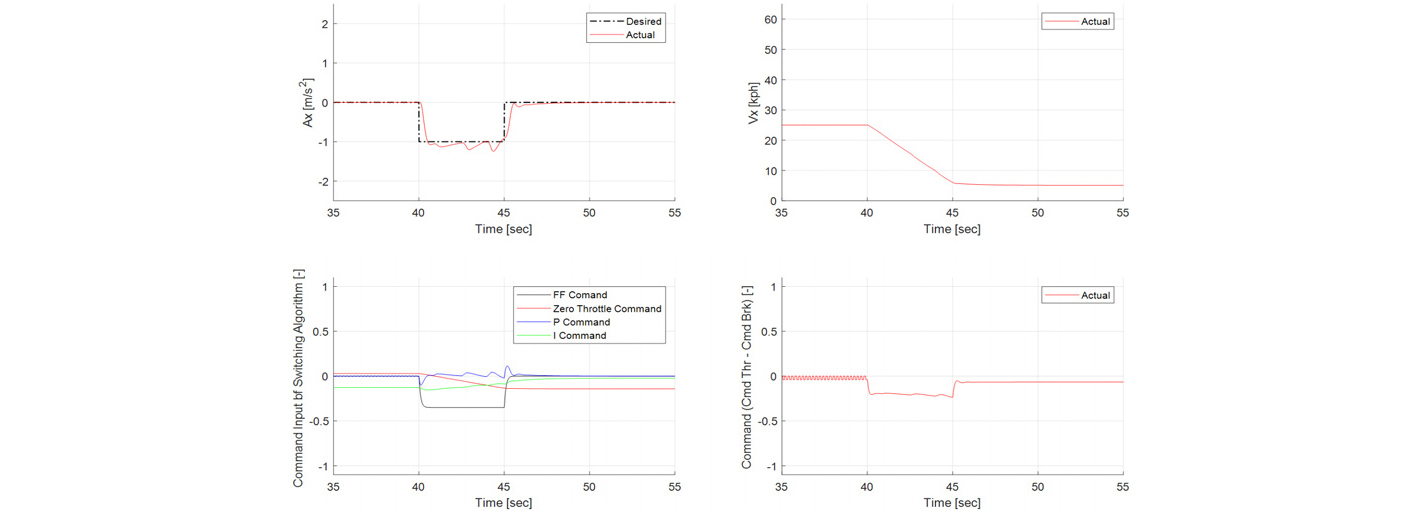
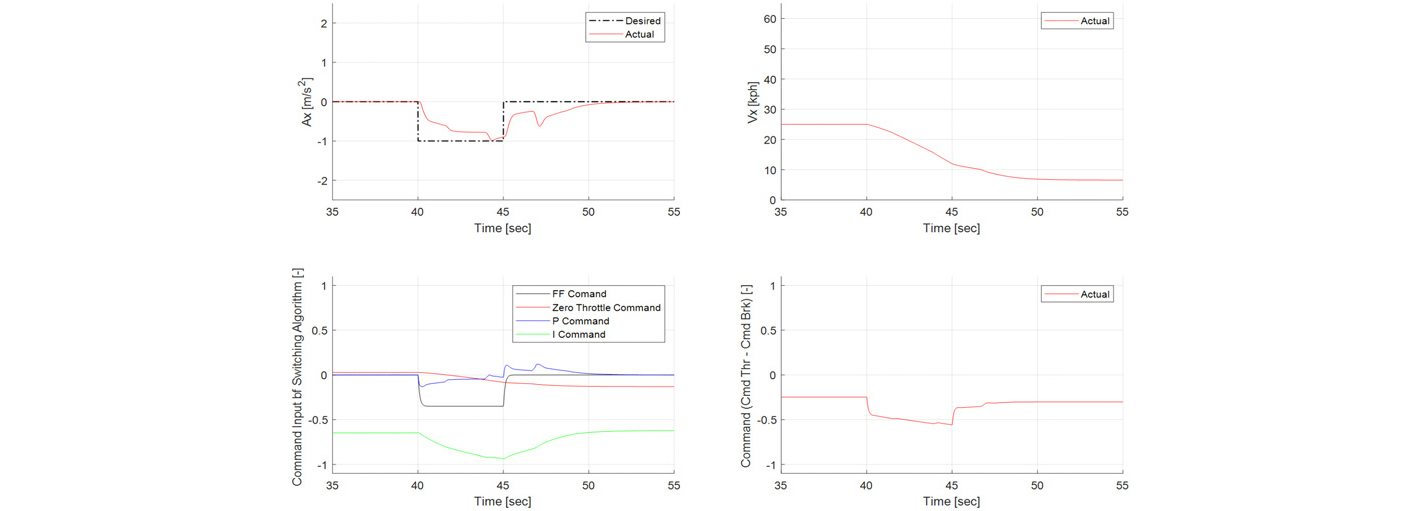
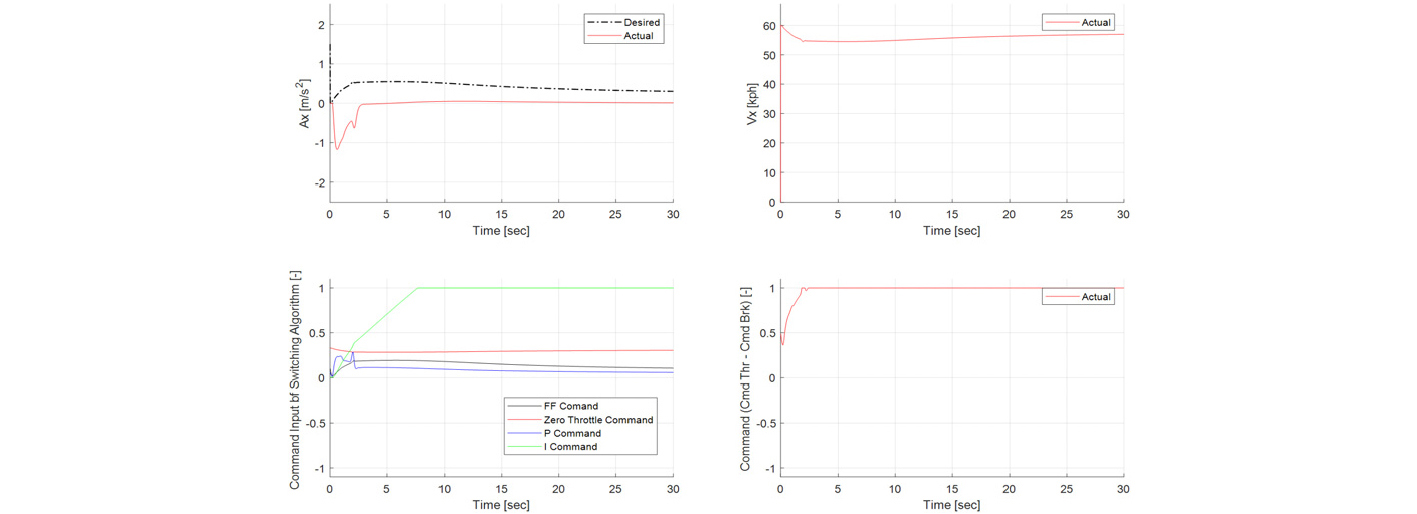
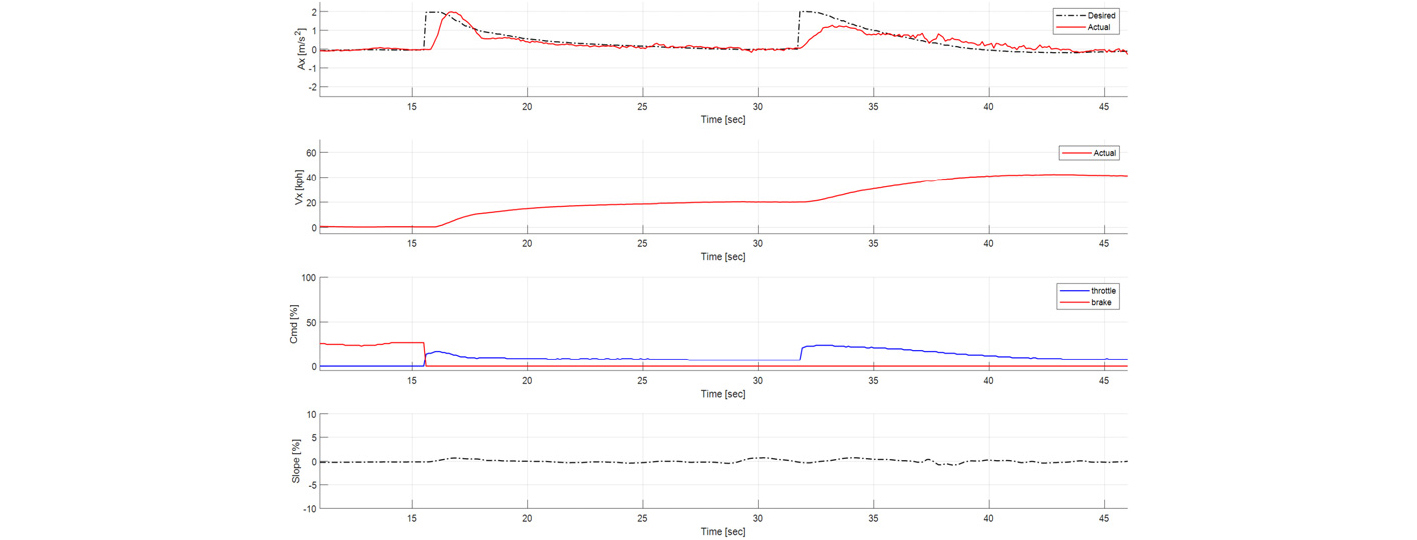
목표 가속도 추종 시뮬레이션 결과 예시는 Fig. 5와 같다.
이외의 평지, 오르막, 내리막에서의 구동, 제동, 정속 유지 성능에 대한 시뮬레이션 결과는 <부록 1>에 첨부하도록 하겠다.
4.2. 실차 테스트
본 연구에서 제안한 종 방향 가속도 제어기는 총 3대의 중형 차량(HMC Solati)에 성공적으로 적용되어 성능 검증을 완료하였다. 각 차량의 제어 인터페이스의 특성은 모두 상이하지만, 동일한 튜닝 절차를 거쳐 파라미터를 선정할 수 있었다. 각 차량 별로 Step Input/Response test 및 선형보간법을 통해 선정된 튜닝 파라미터는 Table 3과 같다.
Table 3.
Finally selected parameters of each vehicle
| Vehicle 1 | Vehicle 2 | Vehicle 3 | |
| Kff1 | 0.1 | 0.25 | 0.05 |
| Kff2 | 0.4 | 0.25 | 0.09 |
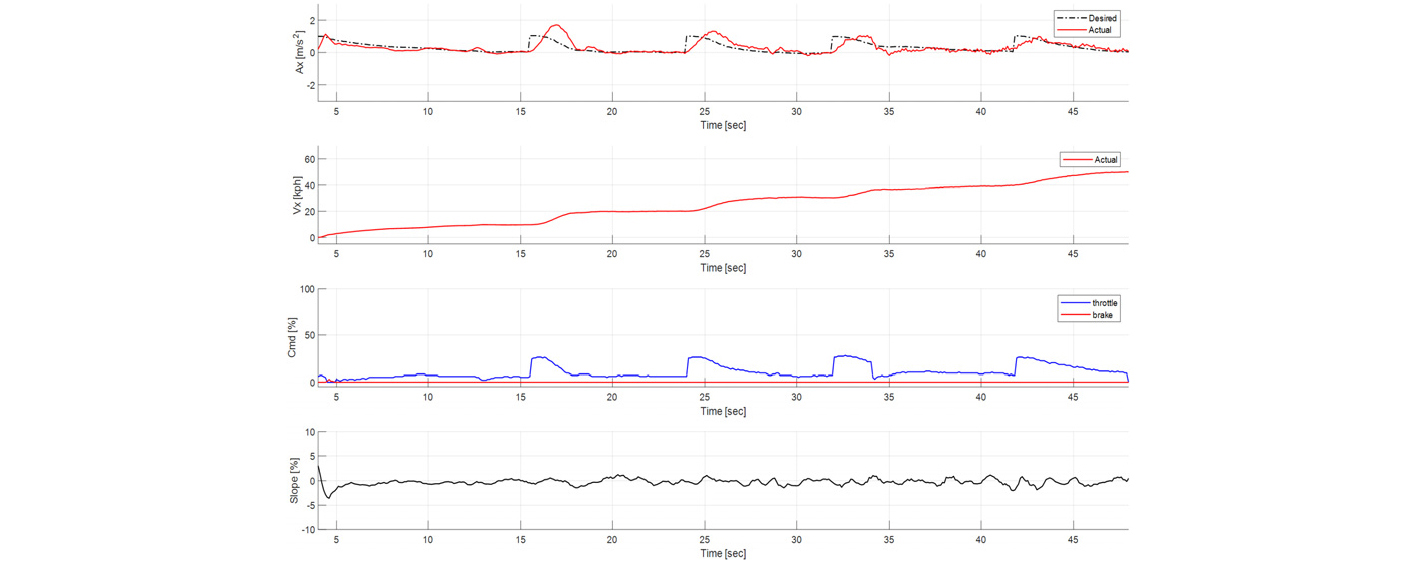
실차 실험은 서울대학교 시흥 캠퍼스에 있는 자율주행차량 테스트 베드와 주변 시흥 도심 도로, 서울 상암 자율주행 테스트 베드에서 이루어졌다. 테스트는 크게 목표 속도 추종을 위한 목표 가속도 추종 성능 테스트와 도심 자율주행을 위한 인지 및 판단 알고리즘의 목표 가속도 추종 테스트로 나누어 진행하였다. 목표 속도 추종을 위한 테스트에서는 목표 속도에 따른 목표 가속도를 식 (12)를 통해 계산하였다.
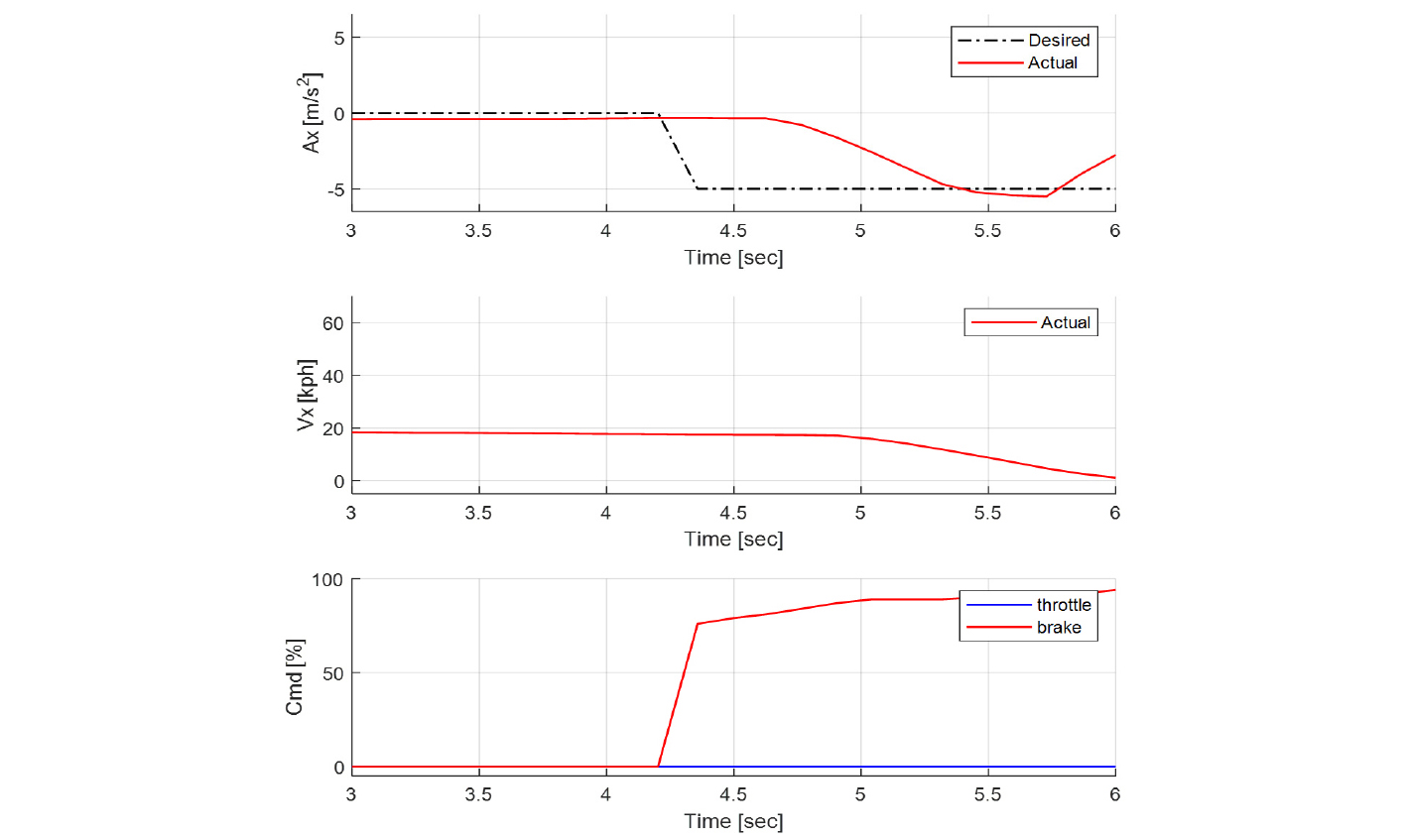
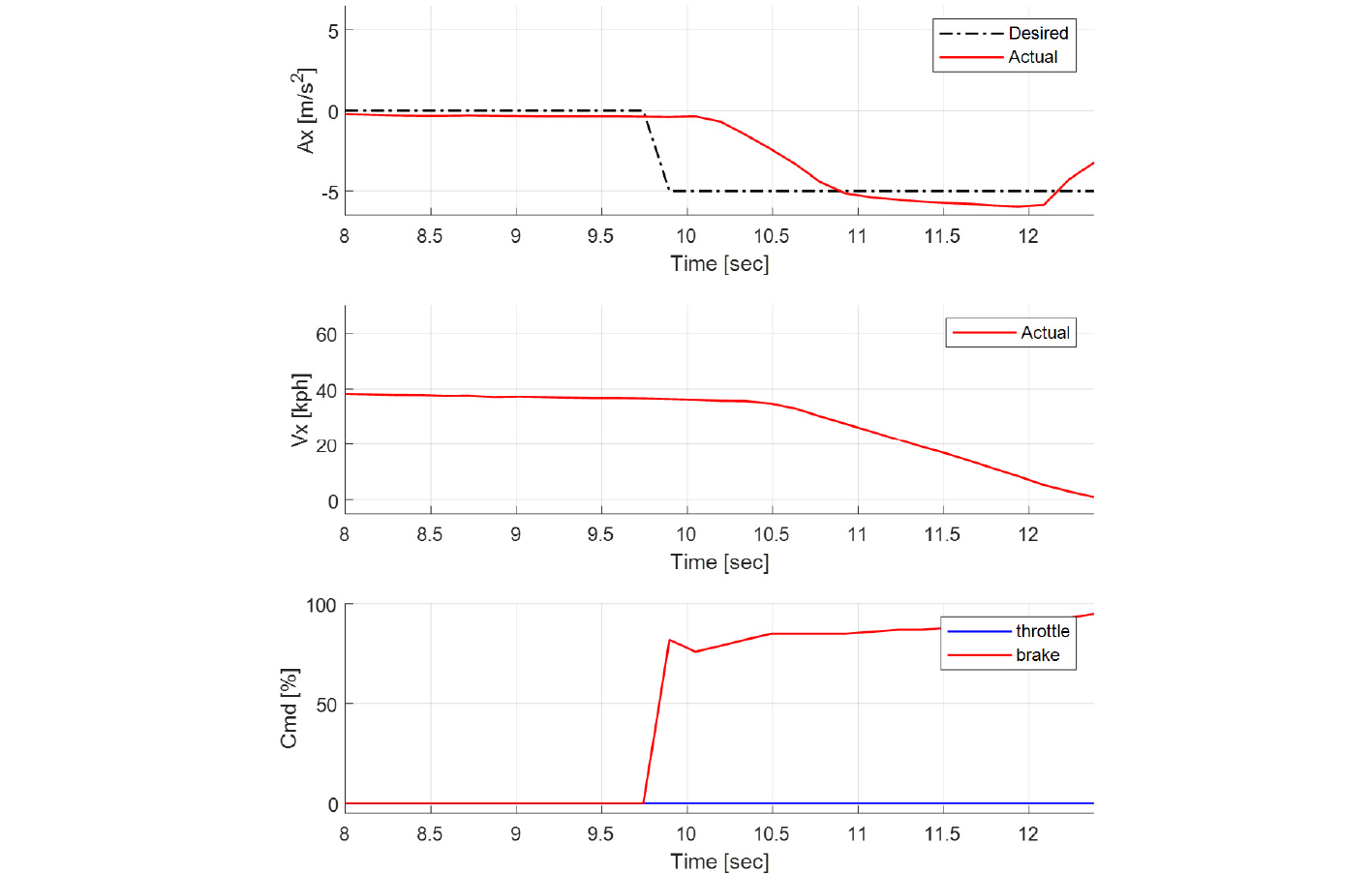
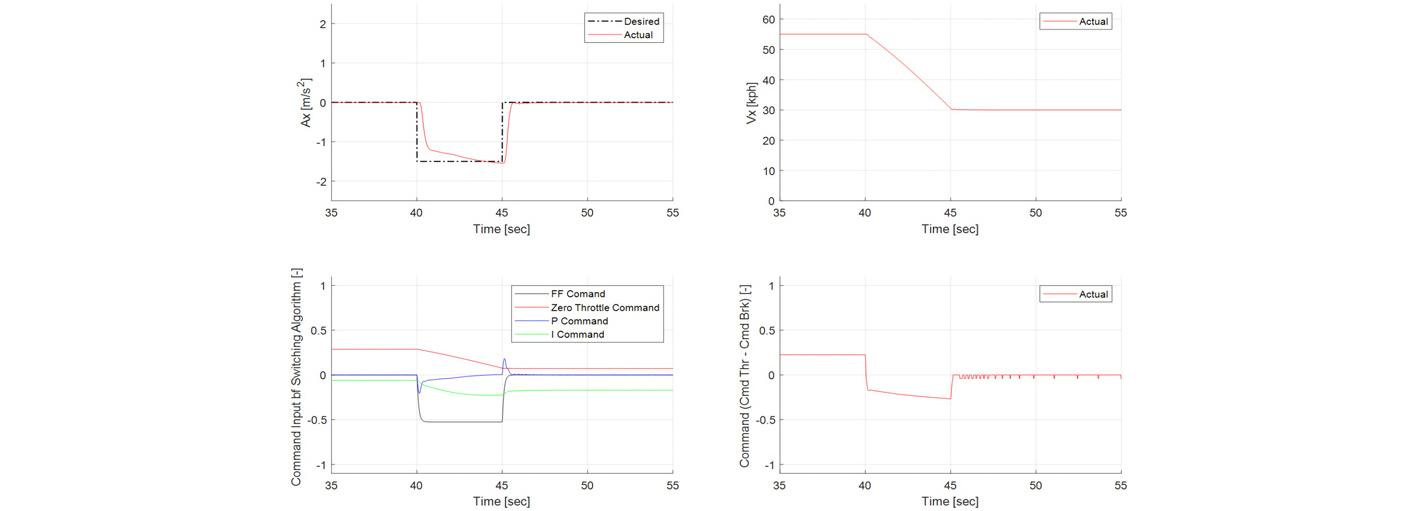
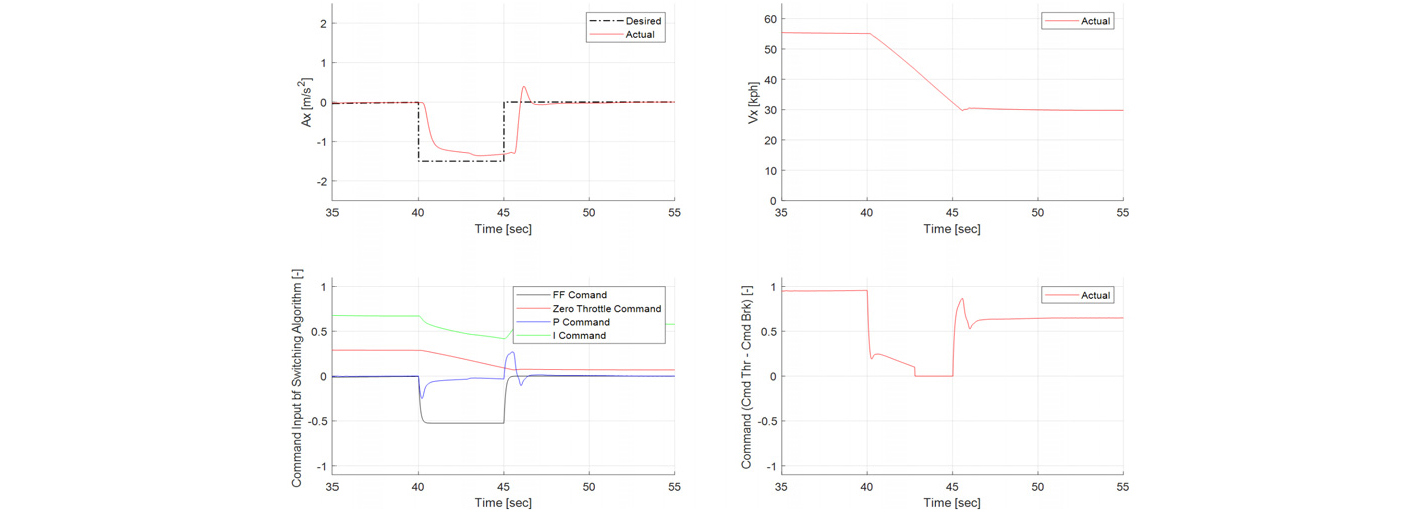
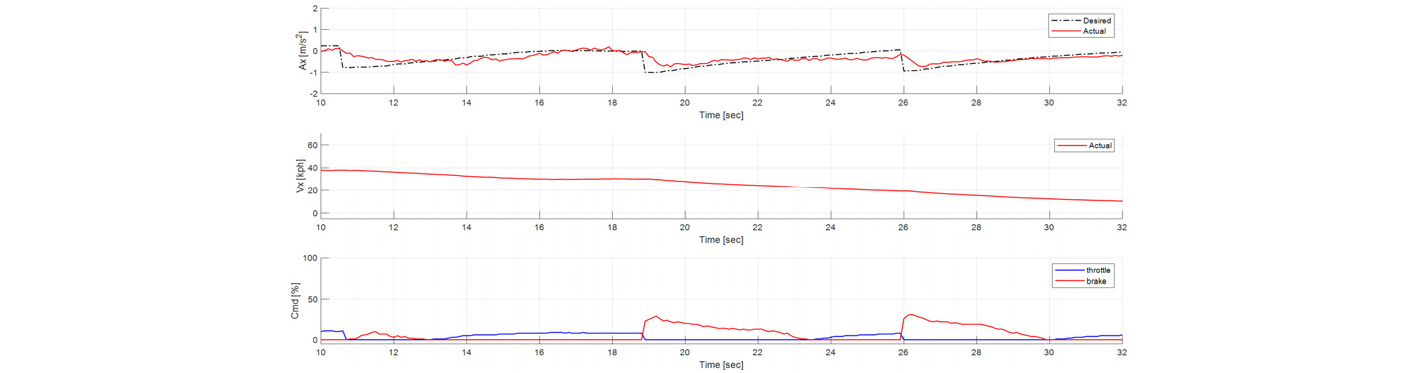
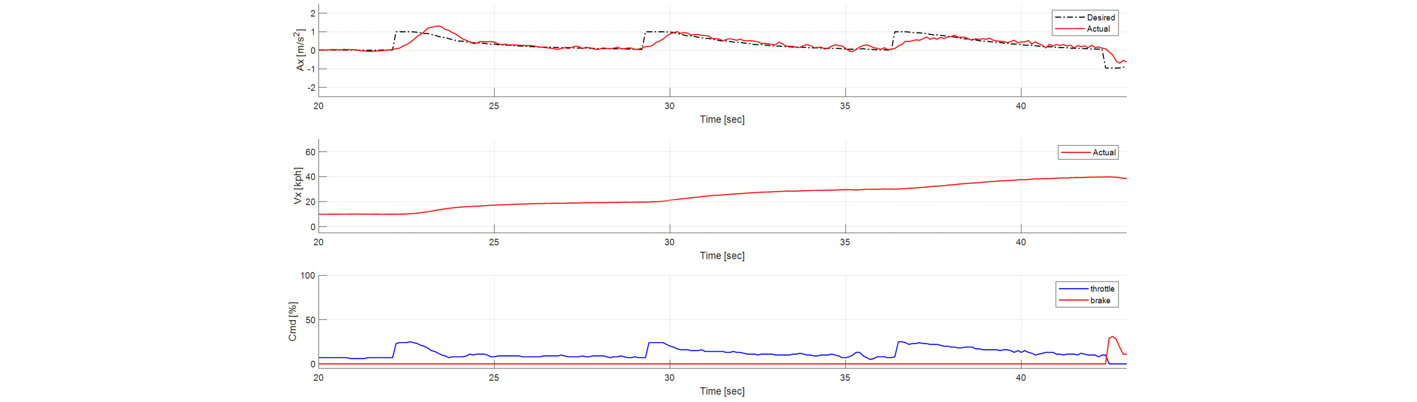
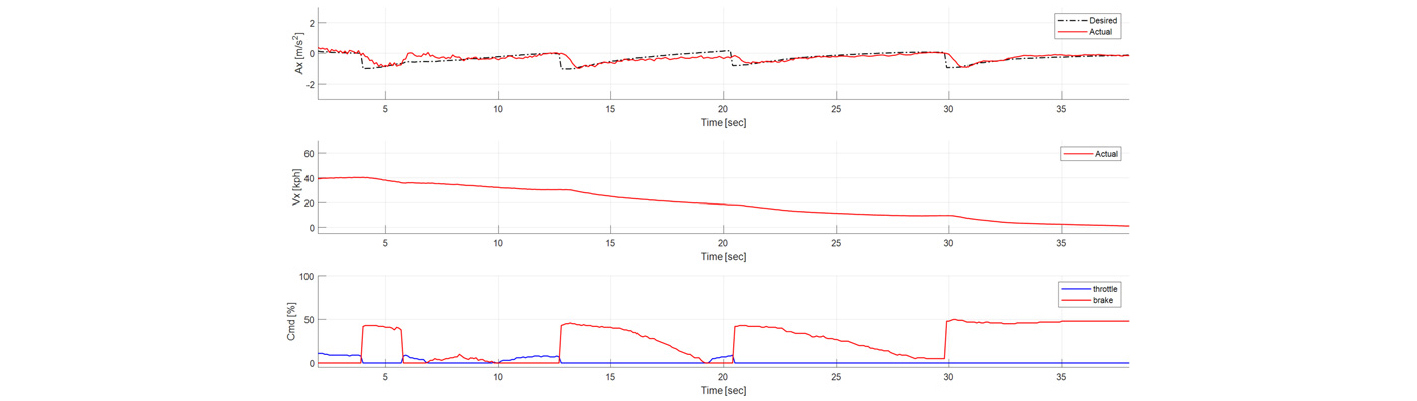
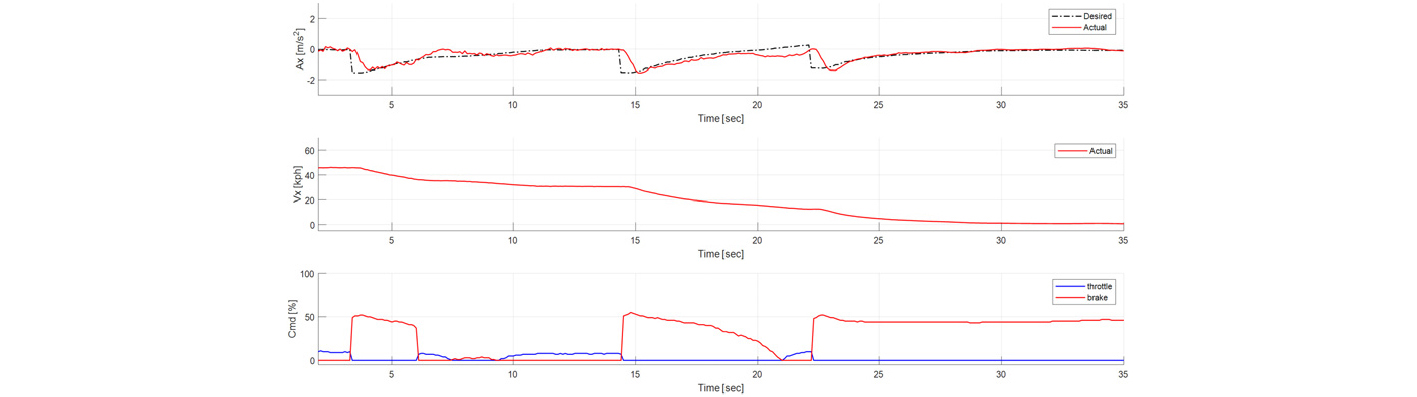
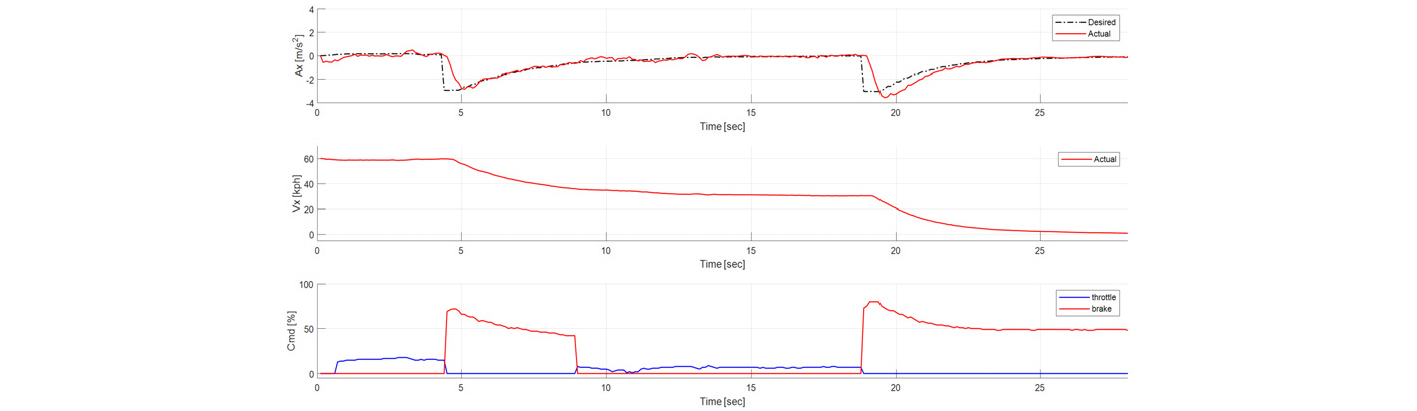
차량1의 목표 속도 추종을 위한 제동 테스트 결과 예시는 Fig. 6과 같다.
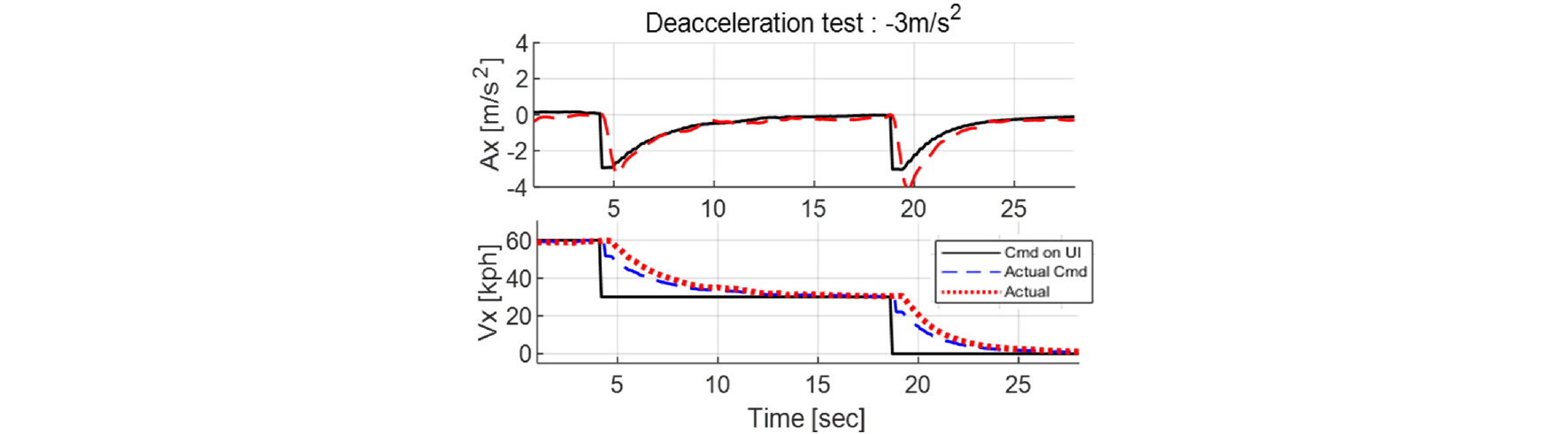
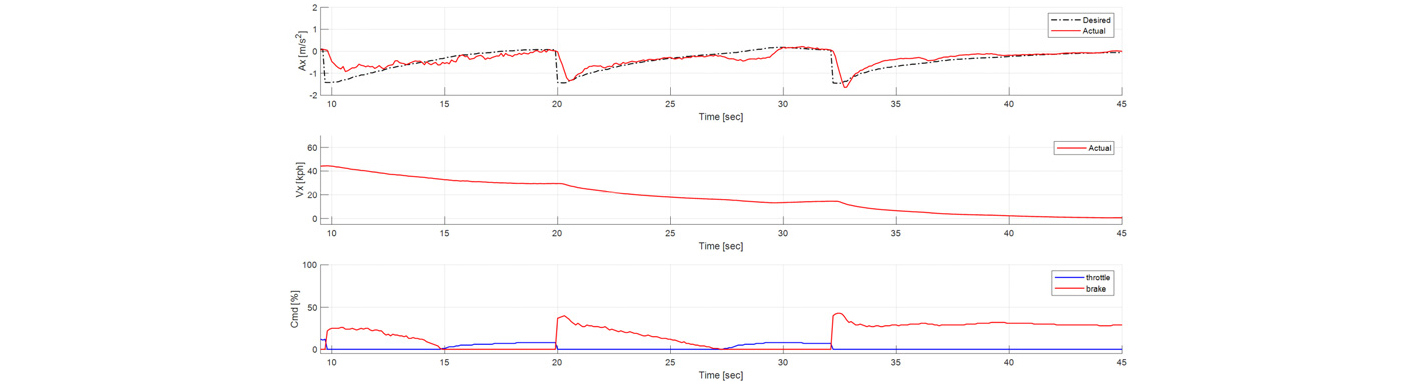
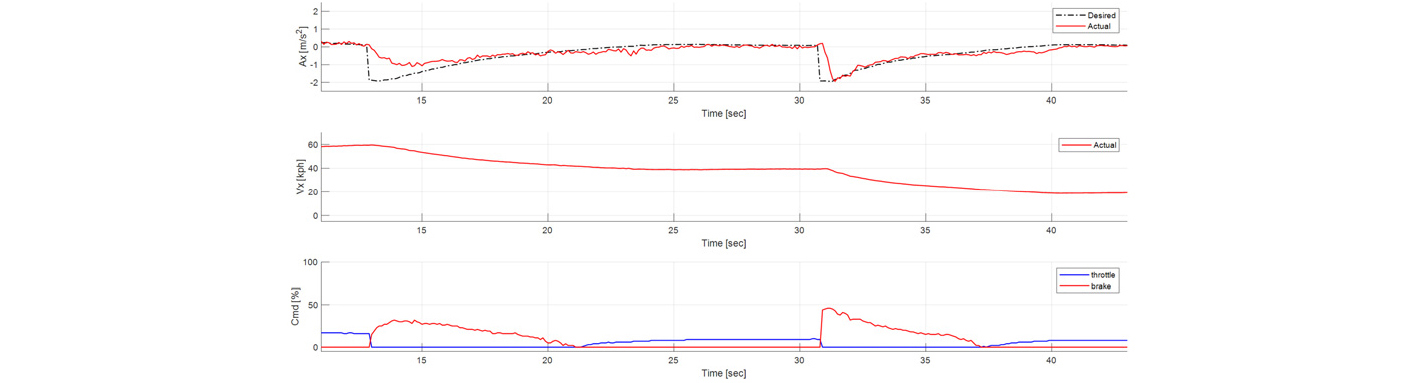
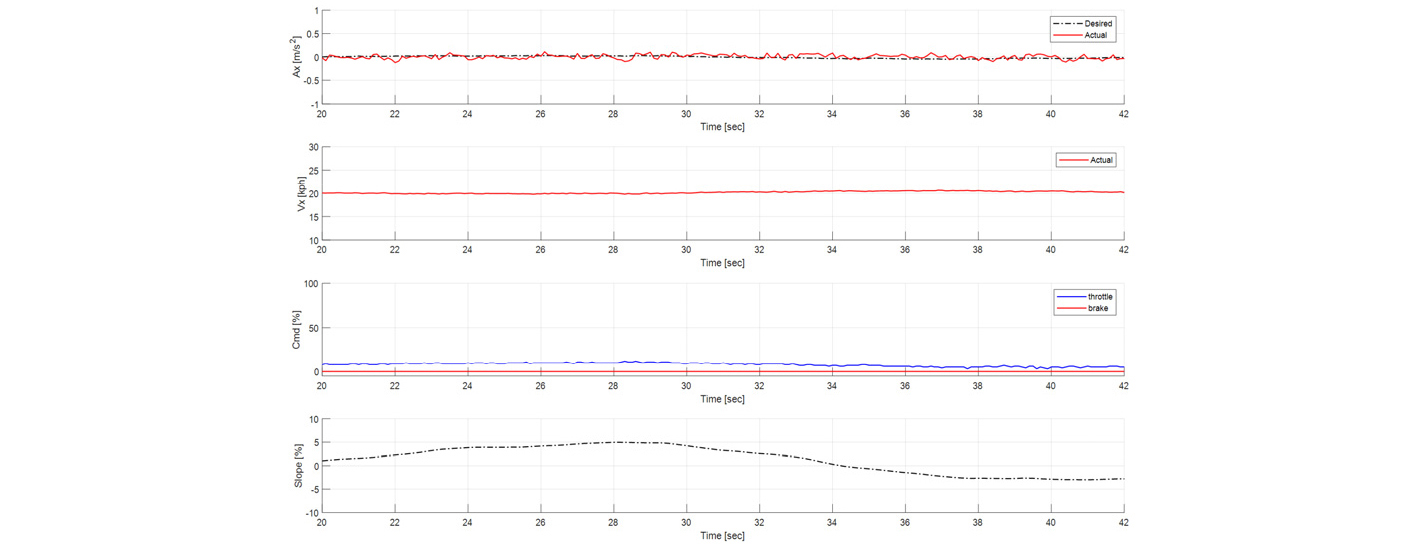
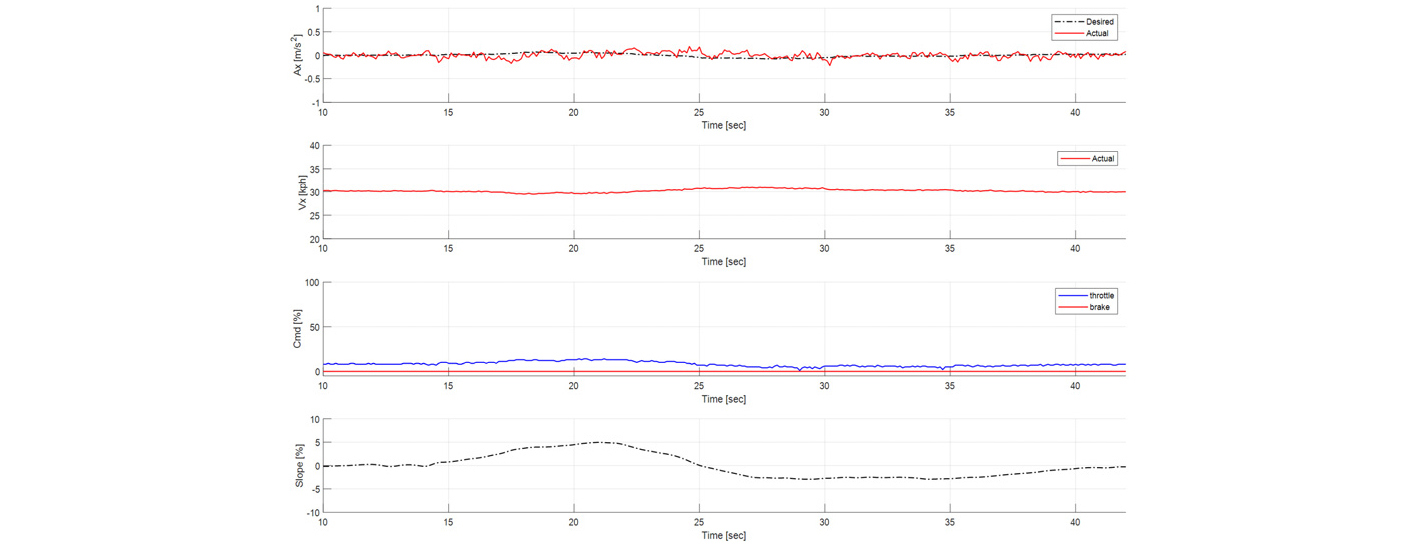
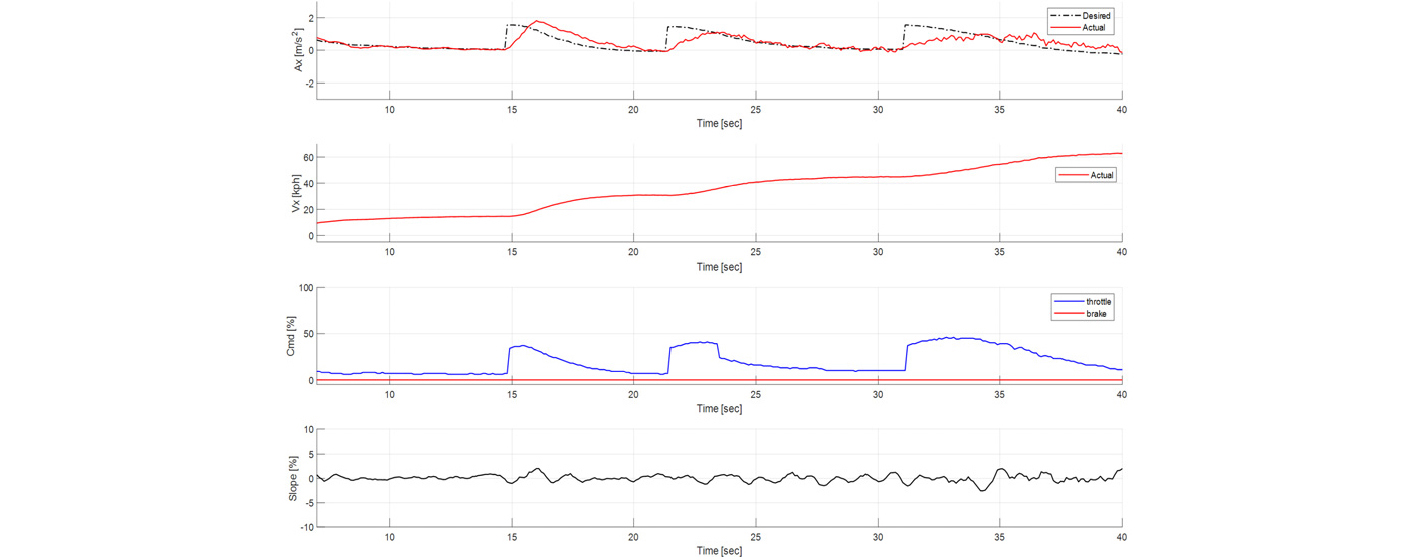
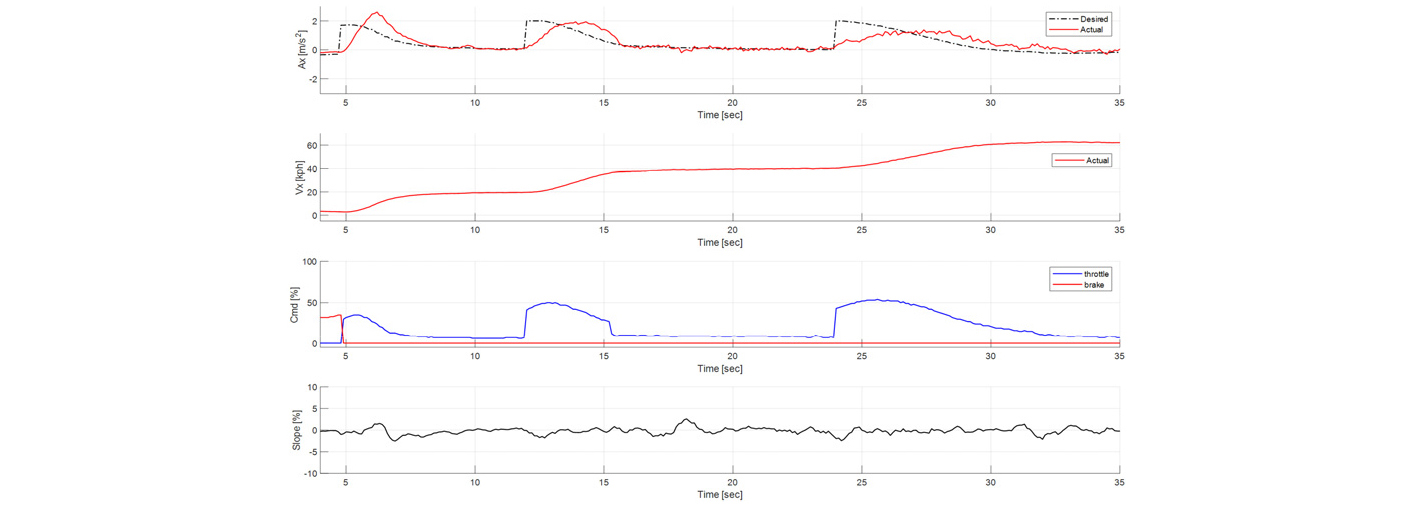
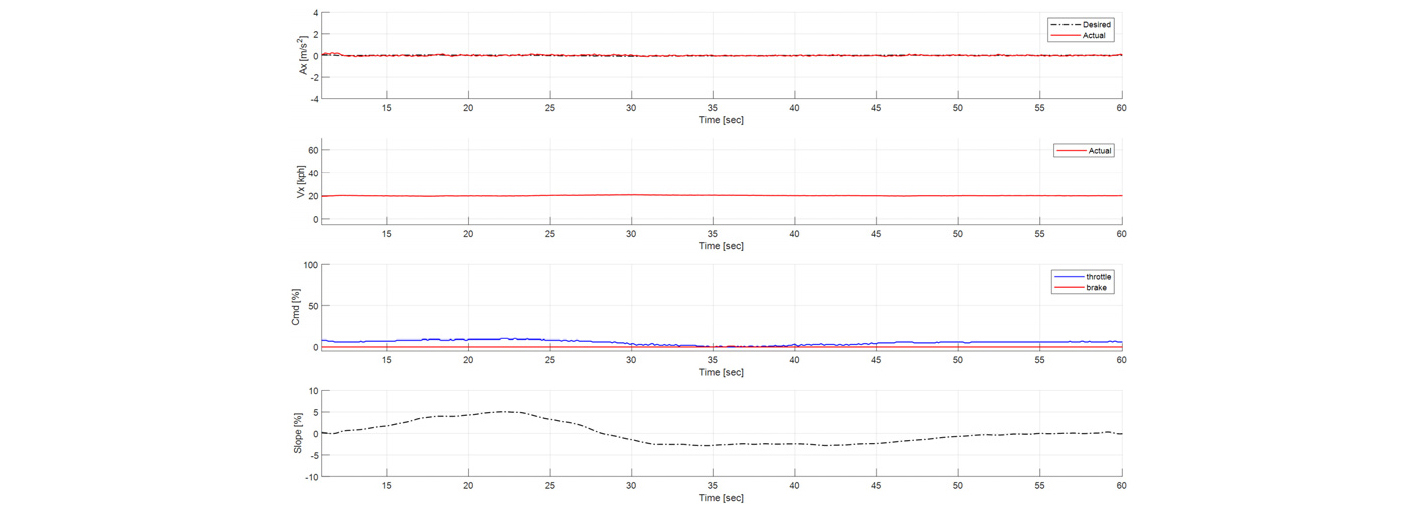
이외의 각 차량별 평지, 오르막, 내리막에서의 목표 속도 추종을 위한 구동 및 제동 실차 테스트 결과를 <부록 2>에 첨부하도록 하겠다.
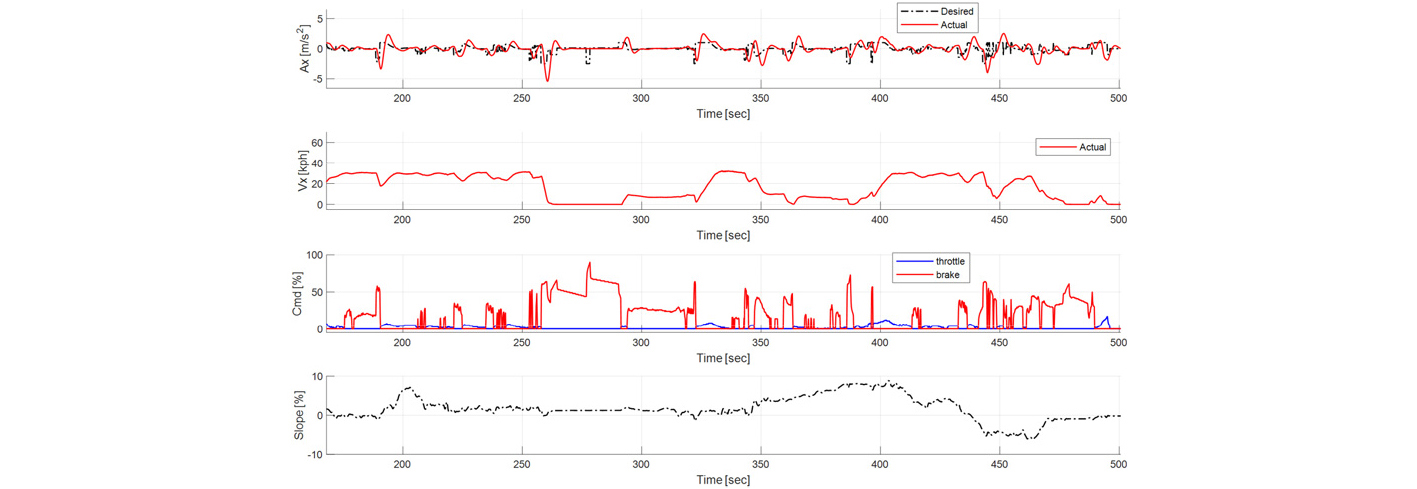
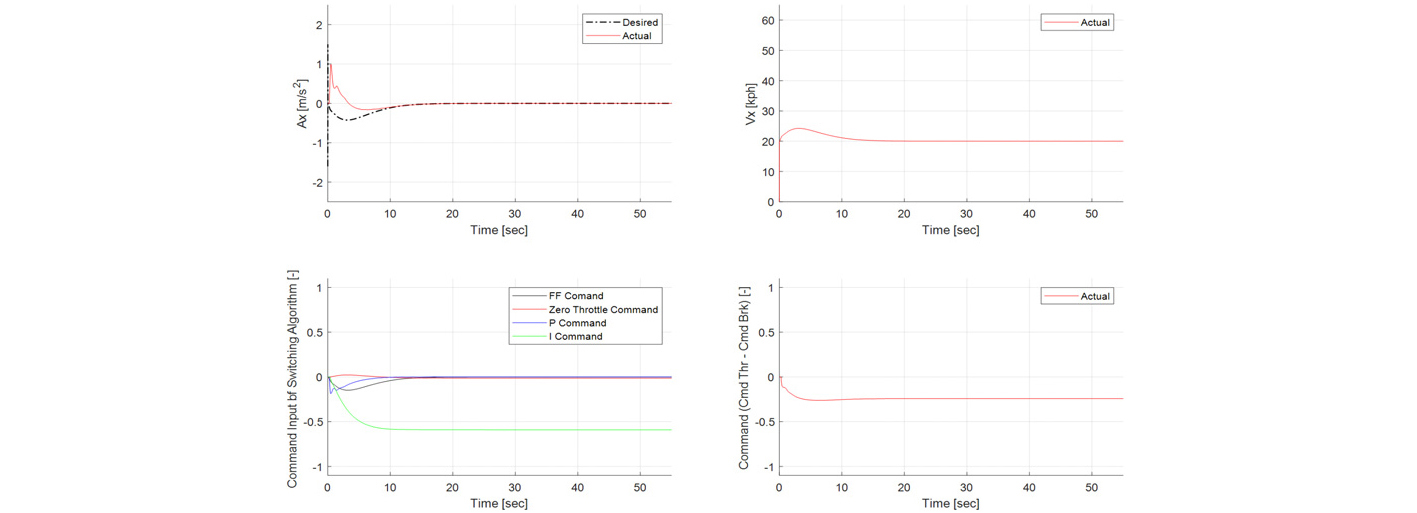
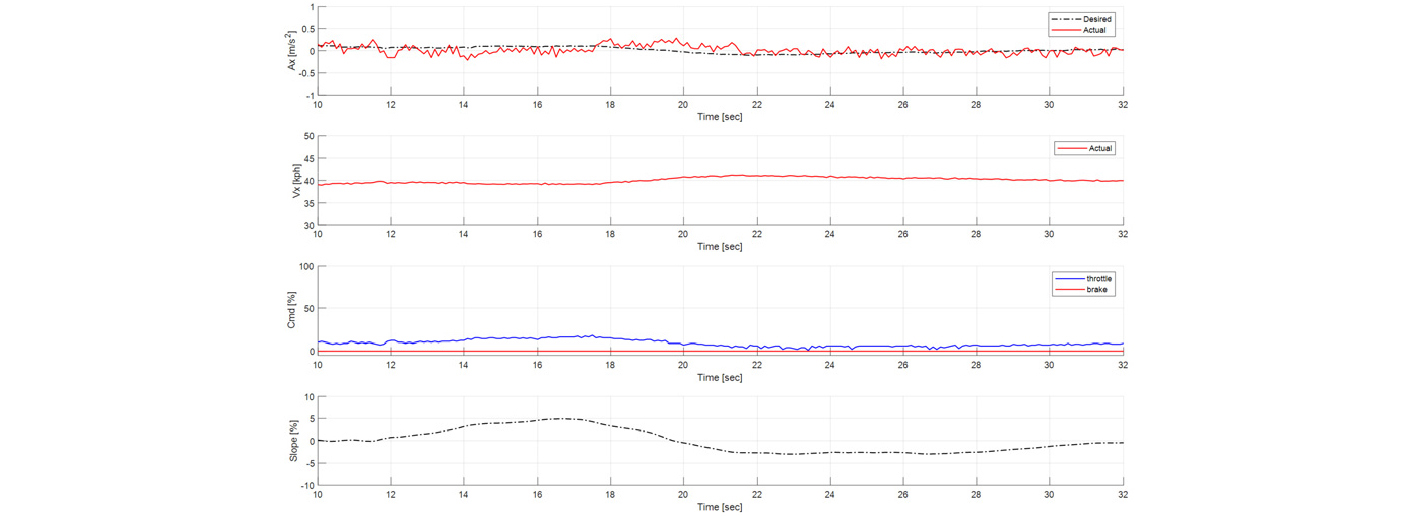
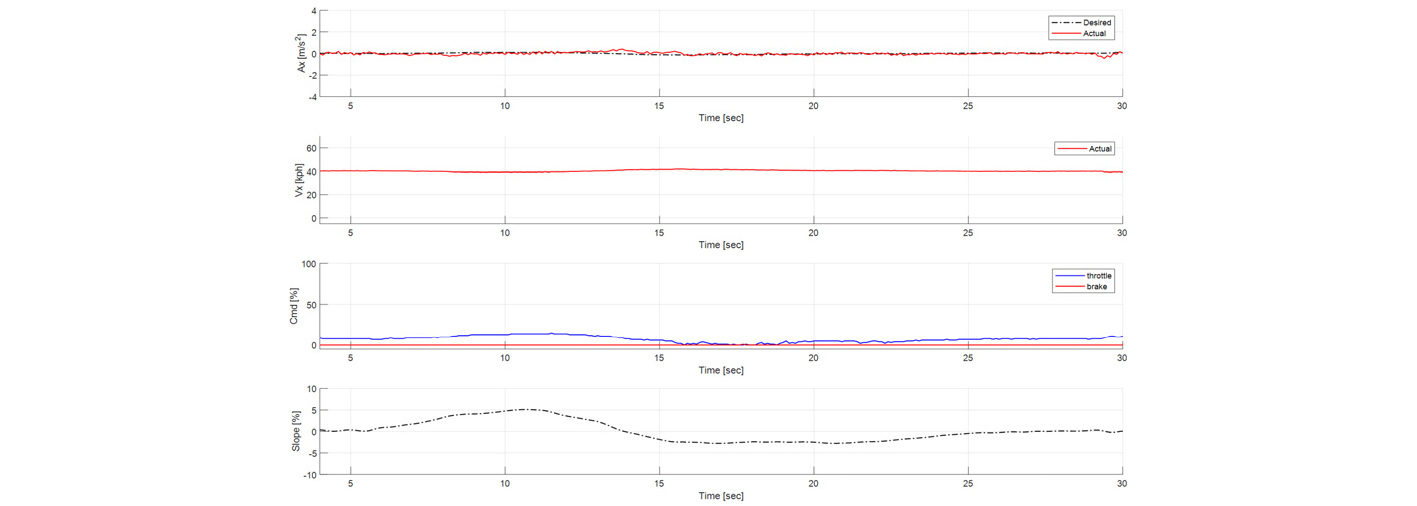
도심 자율주행을 위한 인지 및 판단 알고리즘의 목표 가속도 추종테스트에서 사용된 상위 제어 알고리즘은 선행 연구를 참고하였다.(5,6) 선행 연구의 상위 제어 알고리즘의 목표 가속도를 추종하여 서울 상암 테스트 베드에서 자율주행테스트를 진행한 결과는 Fig. 11과 같다. 도심 자율 주행 상황에서 발생할 수 있는 다양한 변수(정차 및 출발, 급격한 목표 가속도의 변화)등에도 안정적으로 적용이 가능하다는 것을 확인할 수 있다.
5. 결 론
본 연구에서는 step Input/Response test 와 선형보간법을 통해 실차에 적용될 수 있으면서, 속력에 따른 편향, 도로 경사 등으로 인한 오차를 보상하여 안정적으로 도심 자율주행에도 적용될 수 있는 종 방향 제어 알고리즘을 제안하였다. 시뮬레이션 테스트와 실차 테스트를 통해 제안된 알고리즘의 성능을 검증하였다. 특히 실차 테스트는 총 3대의 중형 차량에 대해서 진행되었으며, 테스트 베드 및 실제 도심 도로에서 테스트가 진행되었다.
향후에는 차량의 기어 상태, 경사 추정 등을 통해 피드 포워드항의 정밀성을 높이는 연구가 진행될 수 있다. 또한, 제어 입력의 dead time delay와 time constant를 고려하는, 즉 상태 변수로 과거 제어 입력을 포함시키는 방향의 연구도 필요하다.
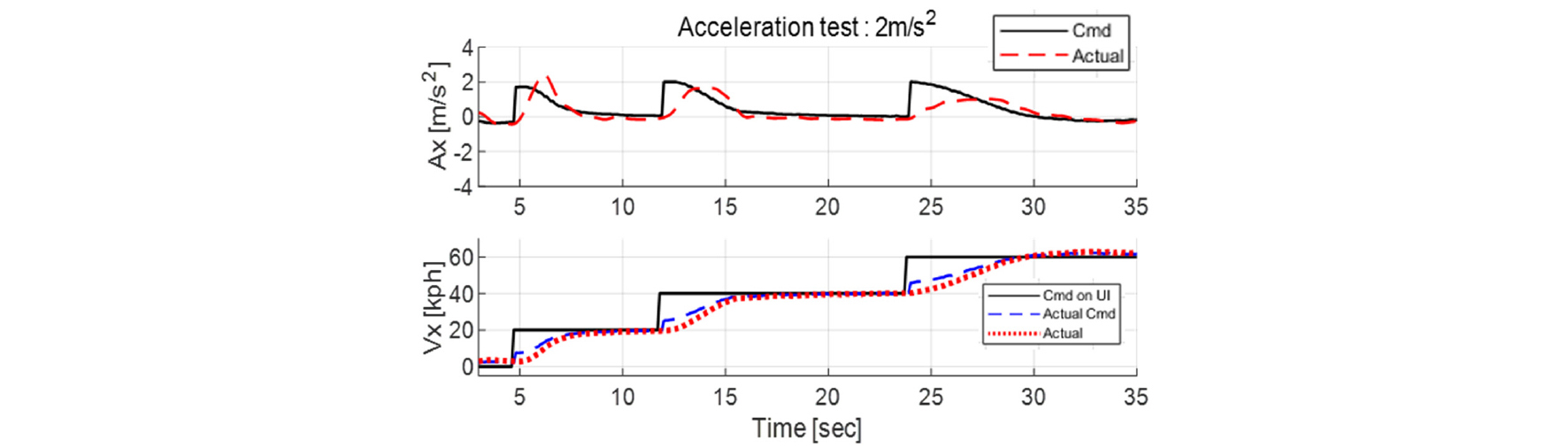
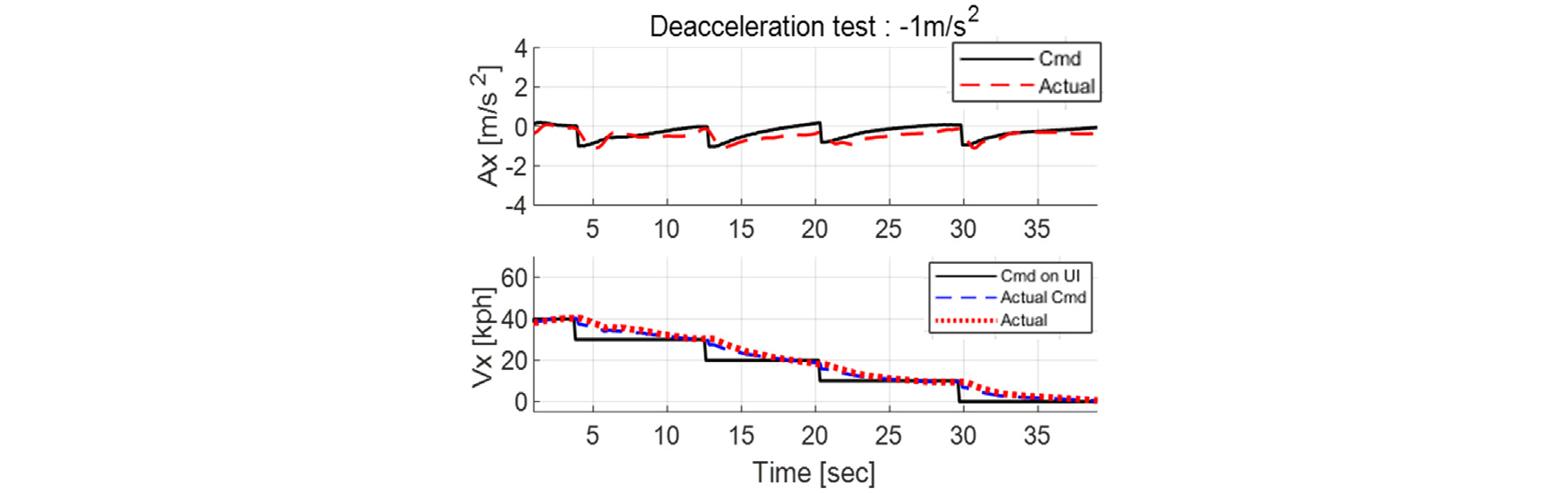
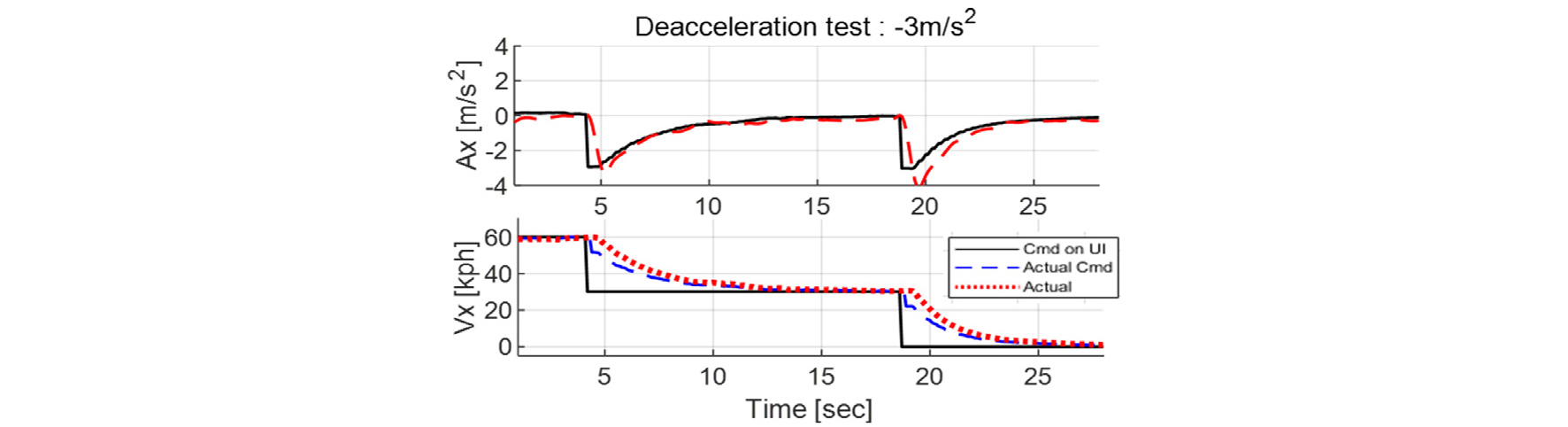
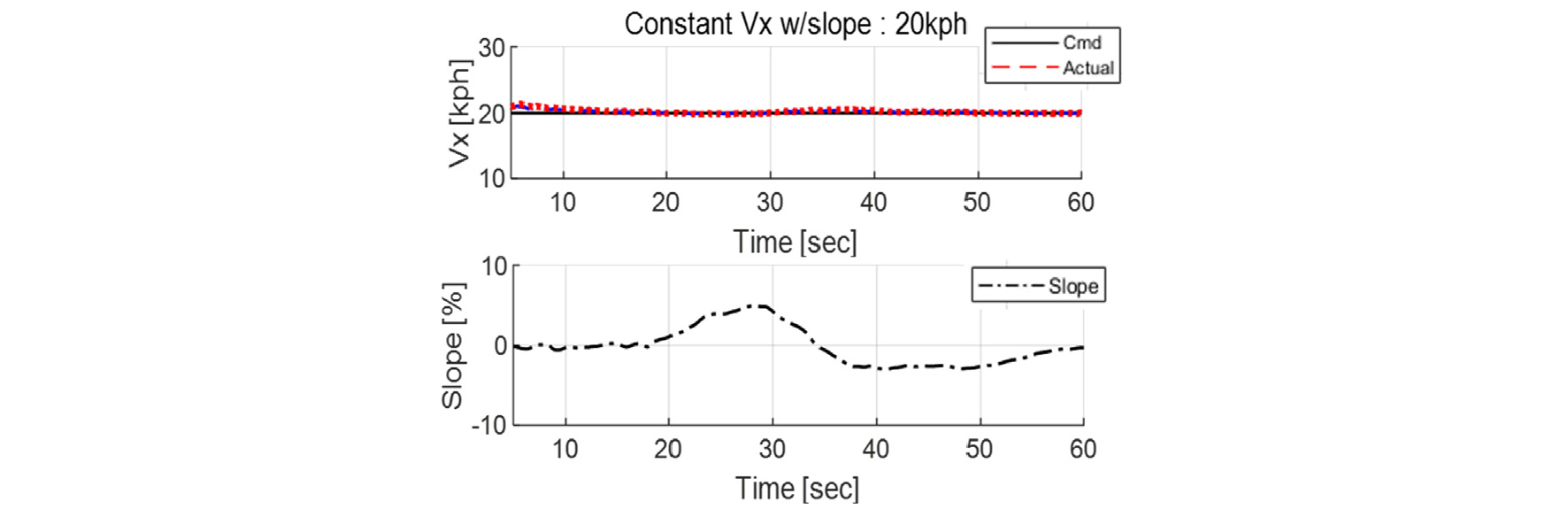
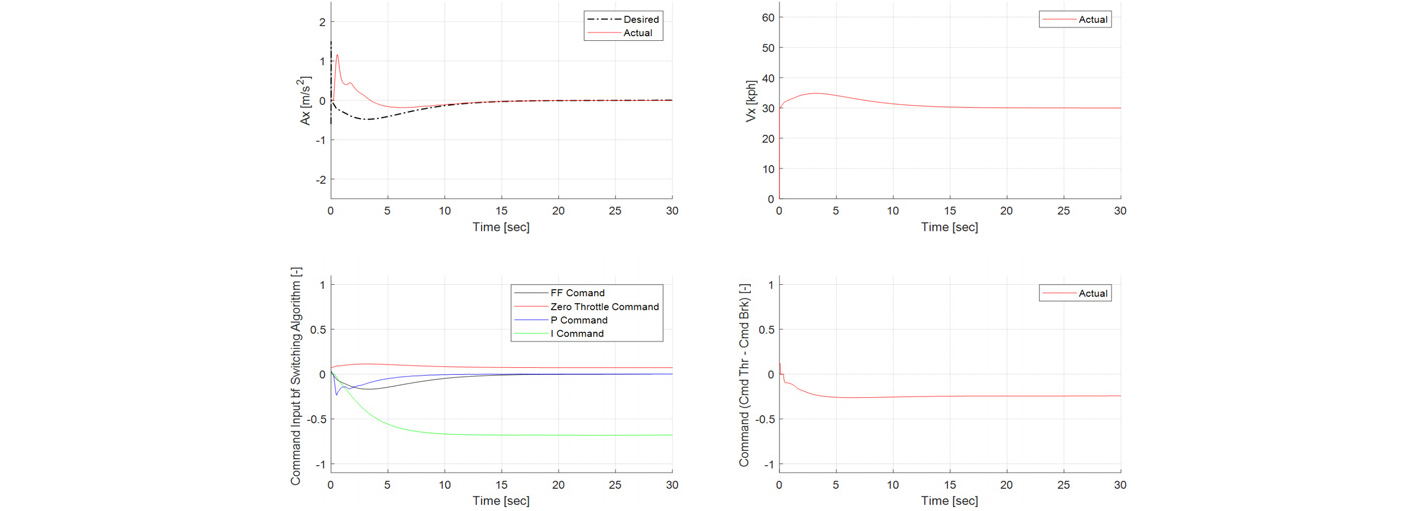
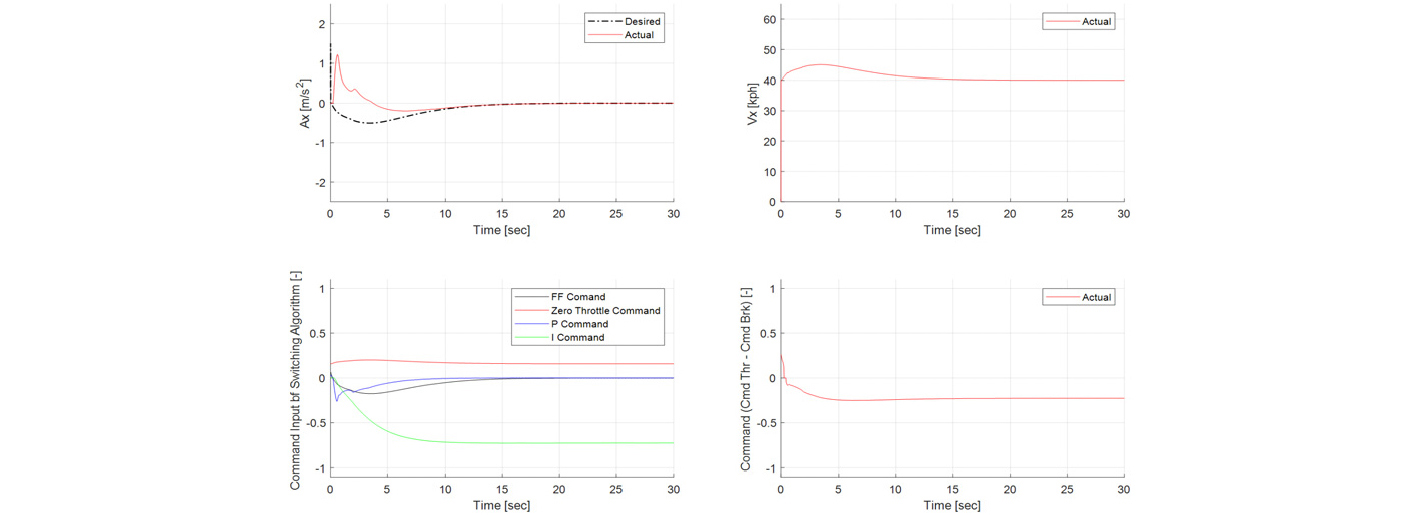
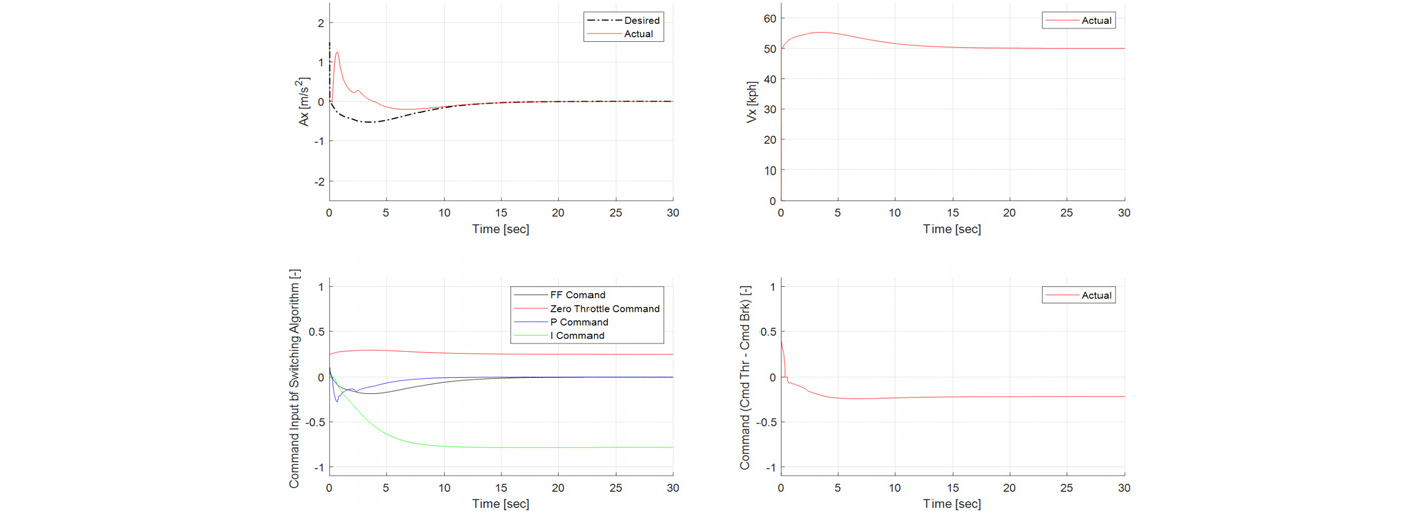
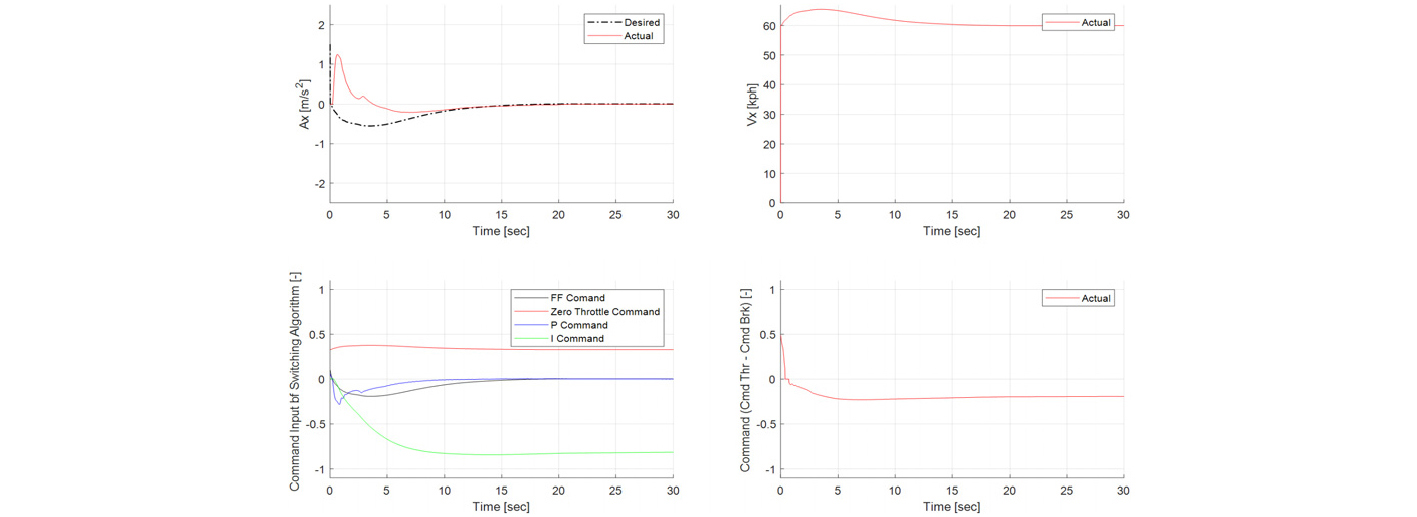
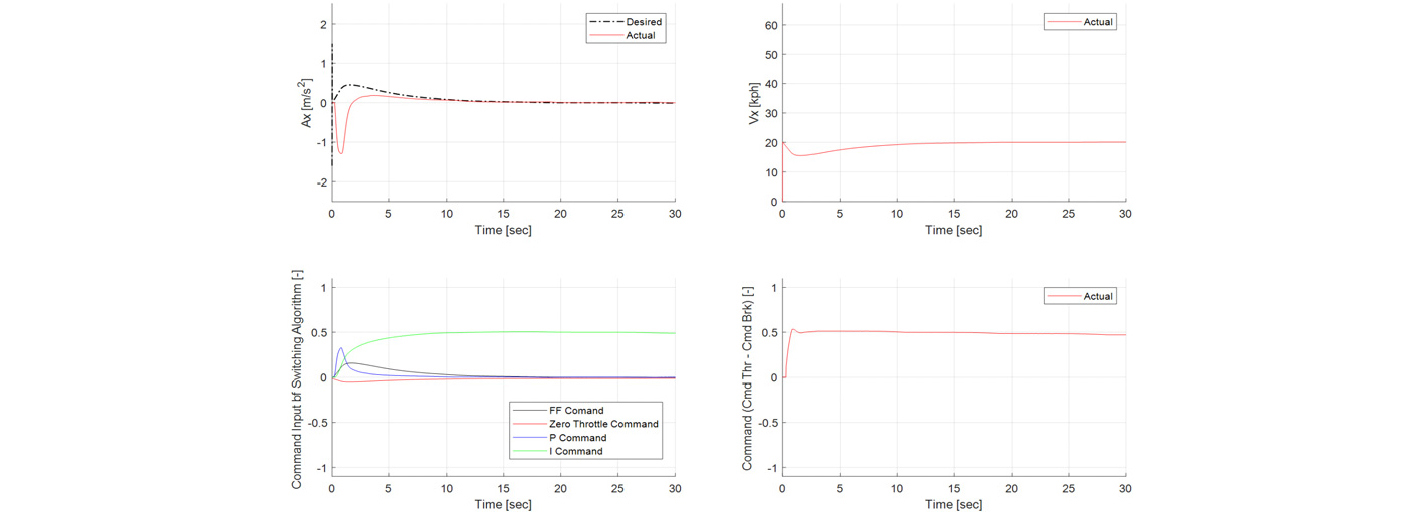
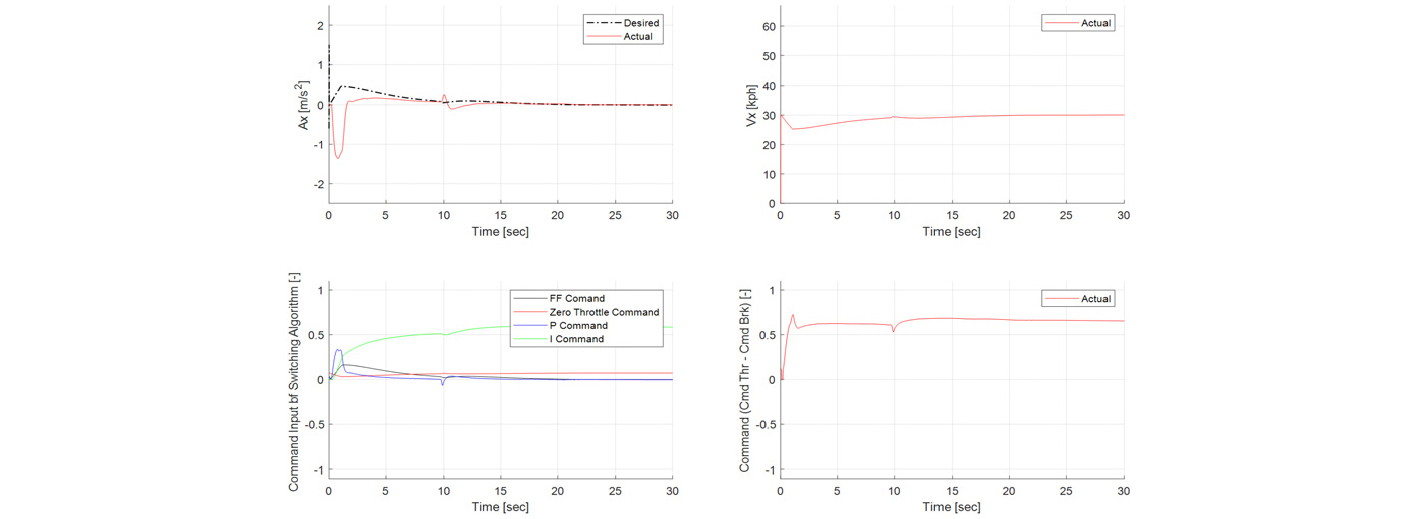
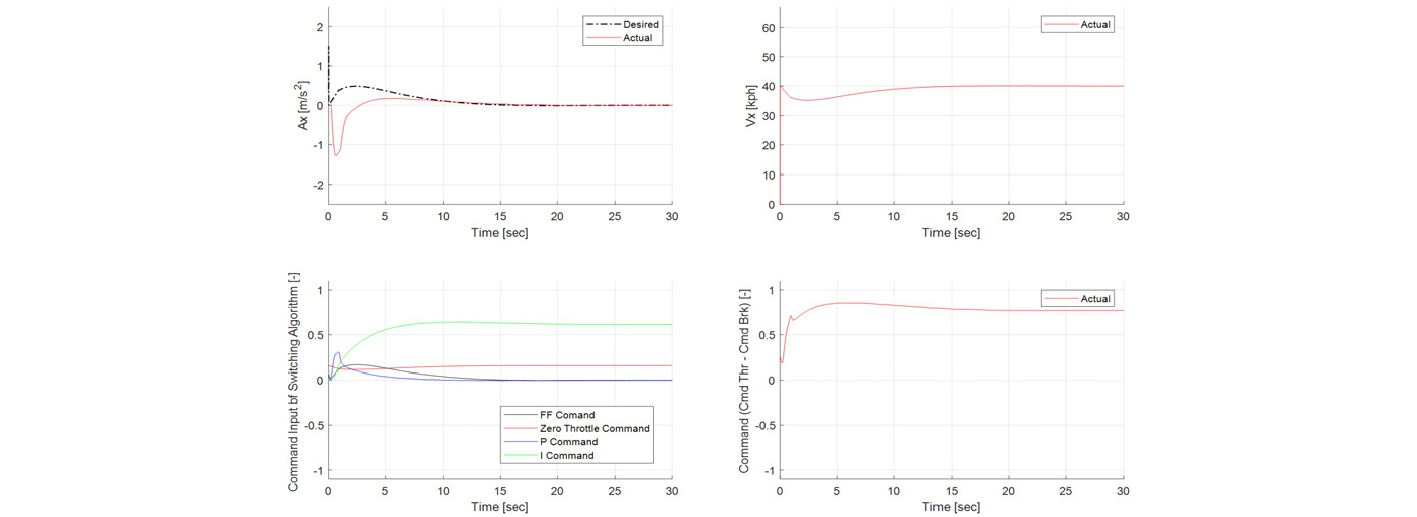
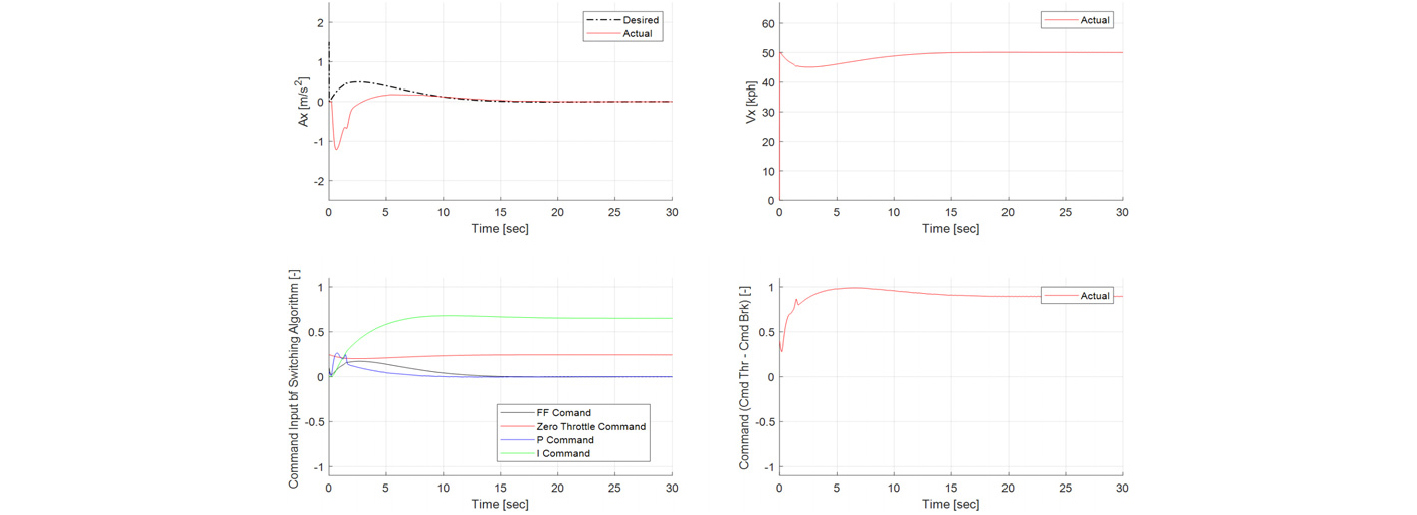
부록 1: 시뮬레이션 테스트 결과
본 연구에서 검증을 진행한 시뮬레이션 시나리오는 Table 4와 같다. Kff1, Kff2는 각각 0.35, 0.14의 값을 사용하였다.

부록 2: 실차 테스트 결과
차량 1에 대한 실차 테스트 시나리오는 Table 5와 같다. Kff1, Kff2는 각각 0.1, 0.4의 값을 사용하였다.
Table 5.
Vehicle test scenario for vehicle
| ax,des [m/s2] | Vx range [kph] | Slope [%] |
| -1 | 0~40 | 0 |
| -1.5 | 0~50 | 0 |
| -2 | 0~60 | 0 |
| 1 | 0~40 | 0 |
| 2 | 0~40 | 0 |
| 0 | 20 | ±5 |
| 0 | 30 | ±5 |
| 0 | 40 | ±5 |
| 0 | 55 | ±5 |
차량 2에 대한 실차 테스트 시나리오는 Table 6과 같다. Kff1, Kff2는 각각 0.25, 0.25의 값을 사용하였다.
Table 6.
Vehicle test scenario for vehicle
| ax,des [m/s2] | Vx range [kph] | Slope [%] |
| -1 | 0~40 | 0 |
| -1.5 | 0~50 | 0 |
| -2 | 0~40 | 0 |
| -3 | 0~60 | 0 |
| 1 | 0~50 | 0 |
| 1.5 | 0~60 | 0 |
| 2 | 0~60 | 0 |
| 0 | 20 | ±5 |
| 0 | 40 | ±5 |

차량 3에 대한 실차 테스트 시나리오는 Table 7과 같다. Kff1, Kff2는 각각 0.05, 0.09의 값을 사용하였다.