

1. 서 론
2. 실험 방법
2.1. 실험개요
2.2. 실험 대상 및 실험 장치
2.3. 실험조건 및 실험순서
3. 실험 결과 및 고찰
3.1. 어라운드 뷰 모니터링 시스템 사용/미사용 제동 시간 분석
3.2. 이상치(Outlier) 분석
4. 결 론
1. 서 론
현재 국토교통부에 등록된 총 554,128대의 건설기계 중 지게차는 217,517대(39.3%)로서, 등록대수가 높은 건설기계이다.(1) 더구나, 언택트 소비가 증가함에 따라 물류산업이 급속하게 활성화되어 지게차의 사용빈도는 더 늘어날 것으로 예측된다.
보고된 재해통계에 의하면, 높은 사용빈도와 함께 지게차 사고는 사망사고 기인물 1위에 위치해 있다. 2017년에서 2021년까지 제조업에서 지게차로 인한 부상자가 1,954명으로 두 번째로 높은 수치를 보이며, 사망자는 77명으로 사망사고 기인물 1위에 위치해있다.(2) 또한 2018년에서 2020년까지 건설업에서는 지게차로 인한 사고재해자가 3,829명(사망 81명) 발생하였다.(3)
높은 산업재해 감소와 예방을 위해 정부의 노력은 지속적으로 경주되어 왔다. 2018년 발표된 ‘국민생명 지키기 3대 프로젝트’에 발맞추어 고용노동부에서는 4대 중점 추진과제 중 하나로서 ‘고위험 분야 집중관리’를 중점추진과제로 설정한 바 있다.(4) 이 중 건설기계·장비에는 안전장치 설치 의무화가 포함되어 산업안전보건기준에 관한 규칙 제179조 제2항이 2019년에 개정, 2021년에 시행되었다. 이에 따라, 사업주는 작업자와 지게차가 충돌할 위험이 있는 경우에 해당 지게차에는 후진경보기와 경광등, 후방감지기를 설치하는 등 후방을 확인하기 위한 조치가 의무화되었다.(5)
한편, 일부 대기업, 관공서, 중대재해 발생 사업장에서는 승용차에 설치되어온 ‘어라운드 뷰 시스템’을 중장비, 화물트럭 등에 적용하고 있다. 지게차 사고유형 중 끼임과 부딪힘이 많은 비중을 차지하는 점을 감안하면, 전후방 운전 중 지게차의 어라운드 뷰 기능 적용은 안전사고 예방에 효과가 있음을 예상할 수 있다.
최근 발표된 어라운드 뷰 모니터링 기능 관련 선행연구를 살펴보면, 기능 구현을 위한 알고리즘의 향상이나 추가기능 연구가 진행되었다. 김종호 등(6)은 AVM을 사용하여 정지선 감지를 통한 자율 주행 보정 알고리즘을 제시하였다. 고영준 등(7)은 영상 시스템에 쌍곡선 실린더형 반사체를 이용했을 때 나타나는 왜곡 현상을 보정하는 알고리즘을 제안하였고, 유환신과 정의붕(8)은 본래에 어라운드 뷰 모니터링 시스템이 갖고있는 사각지역 감시 기능 외에 추가적인 기능인 차선 인식, 충돌거리 인식 등을 활용하고자 하였다. 홍재근(9)은 자동 주차 시스템(Automatic Parking System, APS)과 어라운드 뷰 모니터링 시스템을 통합하고 광각 카메라의 구조와 왜곡되는 영상에 대한 보정, 초음파 센서로 거리를 측정하는 원리를 확인하여 하나의 시스템으로 운영함으로써 주차할 수 있는 공간을 탐색하고, 자동으로 주차를 실행하는 기능을 구현하였다.
하지만, 어라운드 뷰 시스템의 지게차 적용을 통한 안전사고 예방 효과성 분석에 대해서는 체계적으로 연구가 진행된 바가 없다. 따라서, 본 연구에서는 실제로 어라운드 뷰 모니터링 기능을 지게차에 활용하였을 경우, 장애물 인지효과에 대해 알아보고자 한다. 어라운드 뷰 모니터링 기능 사용 지게차와 비사용 지게차를 운전하였을 때, 조종사의 장애물 인지 능력을 제동시간 비교를 통해 분석하였다. 정해진 경로를 따라 지게차 전진/후진 시 인위적으로 상황을 설정하여 제동시간을 측정하고 분석하였다.
2. 실험 방법
2.1. 실험개요
지게차가 Fig. 1에 보이는 바와 같이 경로를 따라 투광등 사이를 전진 또는 후진하는 중, 1~8번에 각각 배치된 진행요원이 미리 정해진 순서에 따라 수신호와 함께 투광등을 켜게 된다. 투광등을 켜지는 순간은 지게차와 사람이 충돌하는 것을 가정하는 것으로서, 조종사가 이를 인지할 경우 육안, 백미러, 어라운드 뷰 시스템을 통해 지게차를 정지하며, 정지시간을 측정하였다.
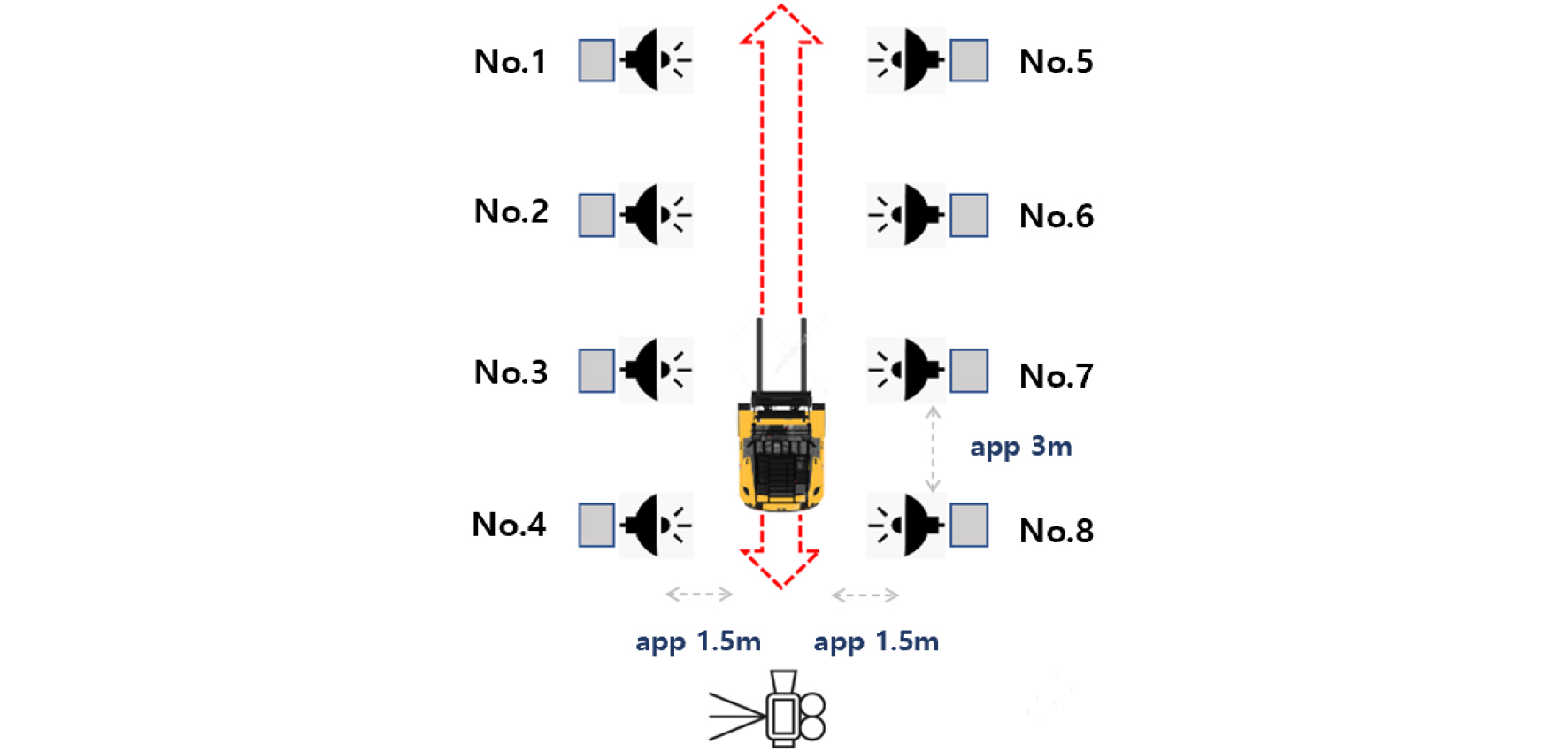
각 투광등 사이 간격 및 지게차와 투광등 사이 간격을 각각 3 m, 1.5 m가 되도록 투광등을 배치하였으며, 각 투광등에는 사전실험순서를 파악한 진행요원을 배치하였다. 지게차 후방에는 캠코더를 위치시켜 실험을 비디오 녹화하여 투광등과 지게차의 제동등이 켜지는 시간을 1/100 초 단위까지 산출하였다.
2.2. 실험 대상 및 실험 장치
조종사 특성과 운전환경 특성을 최소화하기 위하여 어라운드뷰 사용경험이 없는 총 8명의 실험참가자를 지게차 조종사로 구성하였다. 참가자 1인당 32회의 제동 측정을 Table 1에 요약한 바와 같이 실시하였다. 8명의 참가자들은 지게차 평균 조종경력은 10.1년으로서 평균 연령 41.9년의 지게차 조종 종사자들이다.
Table 1.
Driving condition for one driver
| Moving foward | Moving backward | Total | |
| Without AVM | 8 | 8 | 16 |
| With AVM | 8 | 8 | 16 |
| Total | 16 | 16 | 32 |
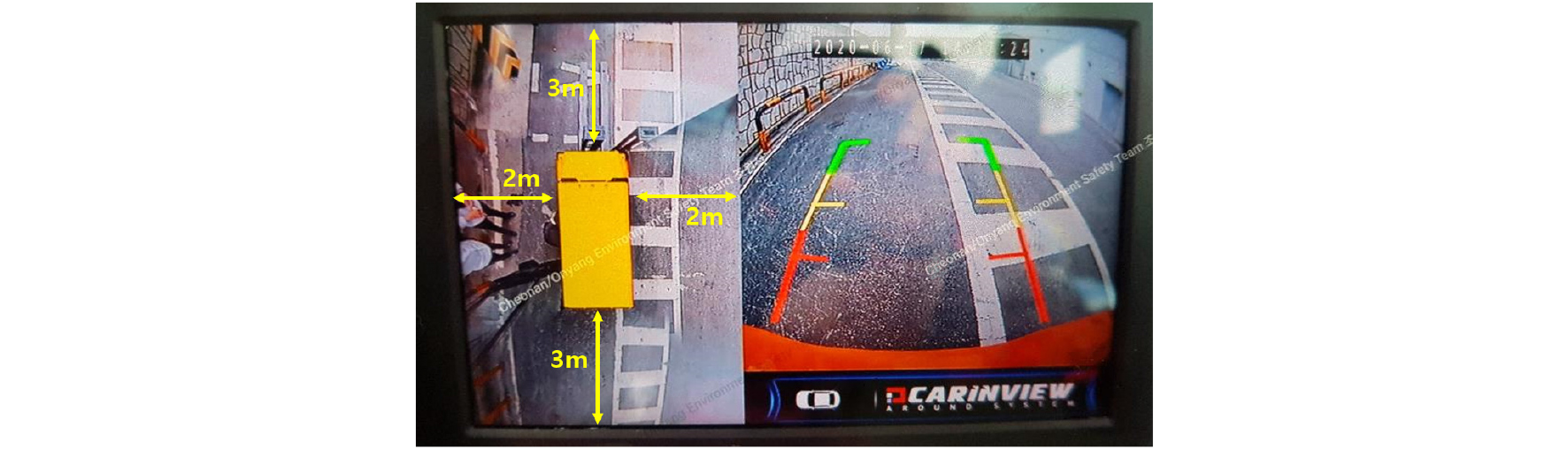
사용된 장비는 (주)두산 산업차량의 디젤지게차 D50EV-7PLUS 모델 1대를 이용하였고, SONY사의 CMOS칩을 사용한 카메라 4대를 브라켓을 이용하여 Fig. 2에 표시된 위치에 설치하였다. 여러 위치에서 획득한 이미지의 영상처리를 통해 조합된 영상을 조종석 내부에서 모니터링이 가능하다. 어라운드뷰 시스템(카인뷰AAV-100DH 모델, ㈜ 아이우스)의 내부모니터를 지게차 조종석 중앙에 설치하여 조종자가 전면을 응시할 때 자연스럽게 볼 수 있도록 하였으며, Fig. 3에 나타낸 내부모니터 화면을 통해 지게차 전방/후방으로부터 약 3 m, 좌/우측면으로부터 약 2 m 정도를 확인할 수 있도록 하였다.

2.3. 실험조건 및 실험순서
평탄한 바닥에 80~150 W 밝기의 8개의 투광등을 양측으로 각 4개씩 설치하고, 낮시간대에 진행하였다. 투광등의 높이는 제7차 한국인 인체치수조사(2015년) 결과에서 산출된 20~50대 남녀 어깨높이의 평균 1.35 m에서 평균 키 1.67 m 사이로 결정하였다.(10)
지게차의 어라운드 뷰 사용 여부 및 전진/후진의 4가지 조건을 Table 2와 같이 조종사 1인당 총 32회 진행하였다. 이 과정을 비디오 녹화하여 투광등과 지게차의 제동등이 켜지는 시간을 1/100 초 단위까지 산출하였다.
Table 2.
Order of experiment
3. 실험 결과 및 고찰
3.1. 어라운드 뷰 모니터링 시스템 사용/미사용 제동 시간 분석
본 실험을 통해 총 8명의 실험참가자는 어라운드 뷰 사용 여부, 투광등 켜짐 위치, 조종방향을 달리하여 Table 2에 정해진 순서에 따라 개인별 32회의 측정을 통해 제동시간 데이터 256개를 수집하였다.
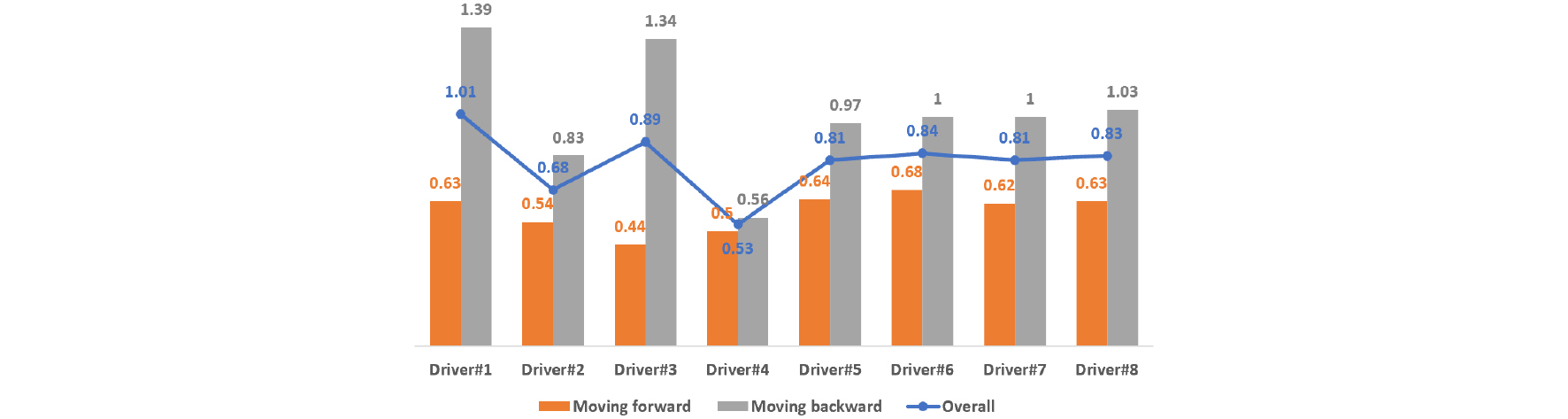
Fig. 4에는 조종사 개인별 평균 제동시간을 나타내었다. 평균 제동시간을 분석할 때, 조종사 모두 전진 중 제동시간보다 후진 중 제동시간이 더 크게 측정되었다. 전진 시에는 1초 이하의 평균제동시간을 보였으며, 조종사 간 편차는 크지 않았다. 반면, 후진 시에는 모든 조종사가 장애물을 인지하고 제동까지 1초 이상으로, 전진 시에 비해 평균 제동시간이 증가하였고, 개인별 편차가 제동시간에 큰 영향을 끼치지 않는 것으로 나타났다. 즉, 시야가 확보된 전진 시와 시야가 직접적으로 확보되지 않은 후진 시에 돌발 상황이 발생한 경우 제동시간에 차이가 있었으나, 조종사 개인별 편차는 크지 않은 것으로 생각된다.
수집된 데이터 256개가 정규분포를 형성하는지 확인하기 위해 Kolmogorov-Smirnov 검정(11)을 실시하고, 검정결과 95% 신뢰수준 하에 정규분포를 따른다는 귀무가설을 기각하였다.
따라서, 해당 데이터가 정규분포가 아님을 확인하고, 비모수 통계분석을 실시하였다. Python/Scipy 모듈에서 제공된 Mann-Whitney U 검정11)을 사용하여 어라운드 뷰 사용/미사용에 따른 제동시간의 차이를 분석하였다. Table 3과 Fig. 5에 통계검정 결과를 나타내었으며, 사용된 Mann-Whitney U검정에 사용된 통계량은 다음 식과 같이 계산된다.
Table 3.
Analysis of braking time with or without the around view monitoring system
| AVM | Number of samples |
Mean (sec) |
Standard deviation (sec) | U | p |
| Without AVM | 128 | 0.84 | 0.728 | 8091.0 | 0.865 |
| With AVM | 128 | 0.76 | 0.470 |
where
n1 : the number of data in U1 (without AVM)
n2 : the number of data in U2 (with AVM)
R1 : sum of rankings in U1 (without AVM)
R2 : sum of rankings in U2 (with AVM)
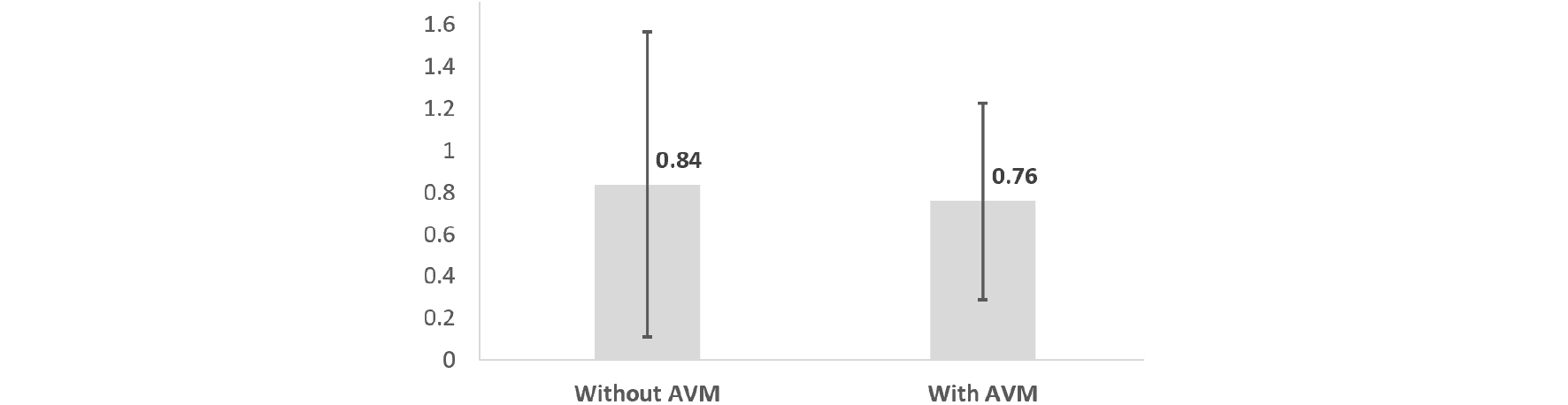
Fig. 5와 Table 3에는 어라운드뷰 기능 사용 유무에 따른 평균제동시간 비교를 나타내었다. 어라운드뷰 기능의 미사용 시에 평균 제동시간은 0.84초, 어라운드 뷰 사용 시에 평균 제동시간은 0.76초로 어라운드 뷰 사용 시의 제동시간이 0.08초 더 짧게 나타난다. 그러나 유의확률(p)이 0.865로 0.05보다 크므로, 어라운드 뷰 모니터링 시스템 사용 시 평균적인 지게차 제동시간을 줄이는 효과가 통계적으로 유의하지 않은 결과가 나타났다.
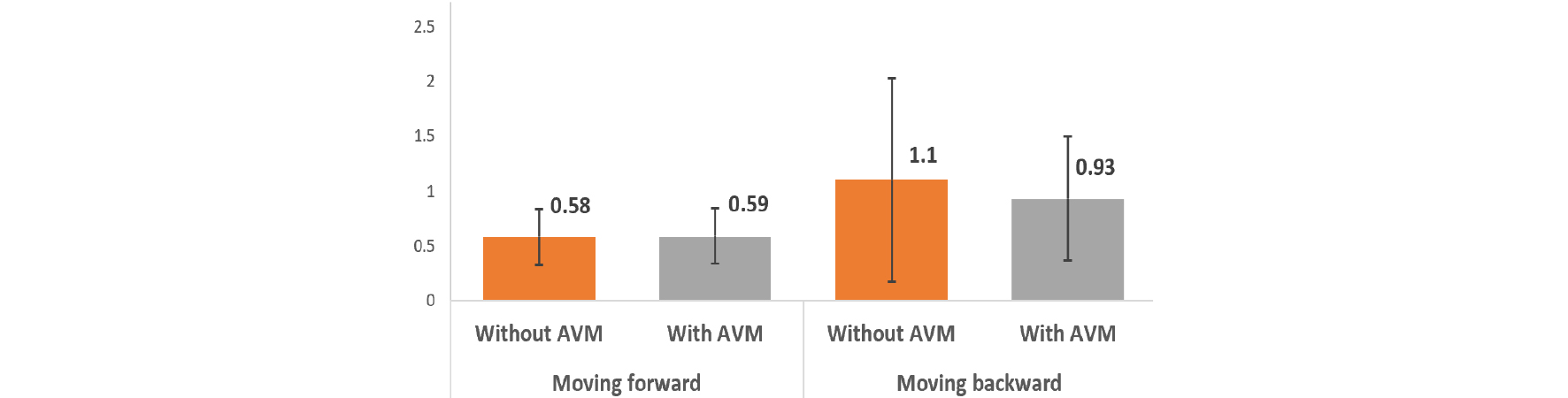
Table 4와 Fig. 6에는 전진시와 후진시의 어라운드뷰 사용 효과를 비교하기 위해 평균제동시간을 나누어 분석하였다. 후진에서 어라운드 뷰 기능의 미사용 시에 평균 제동시간은 1.1초, 어라운드 뷰 사용 시의 평균 제동시간 0.93초로 어라운드 사용 시의 제동시간은 0.17초 더 짧게 나타났다. 그러나, 전진 시에는 어라운드뷰 기능의 미사용 시 평균 제동시간은 0.58초, 어라운드 뷰 사용 시 평균 제동시간은 0.59초로 오히려 어라운드 뷰 미사용 시에 0.01초 더 짧게 나타났다. 하지만, 전진 시에 유의확률(p)이 0.608, 후진 시에 유의확률(p)이 0.681로서, 0.05보다 크게 나타나 통계적으로 유의하지 않다. 결론적으로, 어라운드 뷰 사용은 평균 제동시간을 감소시키는 효과가 있다고 보기 어렵다.
Table 4.
Statistics of braking time with respect to driving direction and around view system
3.2. 이상치(Outlier) 분석
이상치는 정상적인 범위에서 크게 벗어난 값들을 일컫는다. 이상치를 구하기 위해 Tukey가 1977년에 제안한 방법을 채택하였다.(12) 해당 방법은 사분위수를 이용하여 다음의 과정을 통해 하한치, 상한치를 구하고 해당 값을 벗어나는 데이터를 이상치로 정의한다.
where
Q1 : 25 percentile
Q3 : 75 percentile
본 실험을 통해 수집된 제동시간 데이터를 바탕으로 식 (1)을 적용하면 IQR은 0.5375, 하한치는 -0.3863, 상한치는 1.5369이다. 즉, 이상치는 상한치를 초과하는 1.54초 이상의 데이터로 규정한다. 해당 실험에서 이상치는 지게차 조종사가 경로를 따라 이동하는 과정에서 외부 자극(투광등/수신호)을 인지하여 지게차를 정지하기까지 걸리는 시간이 정상범위로부터 벗어남을 의미한다.
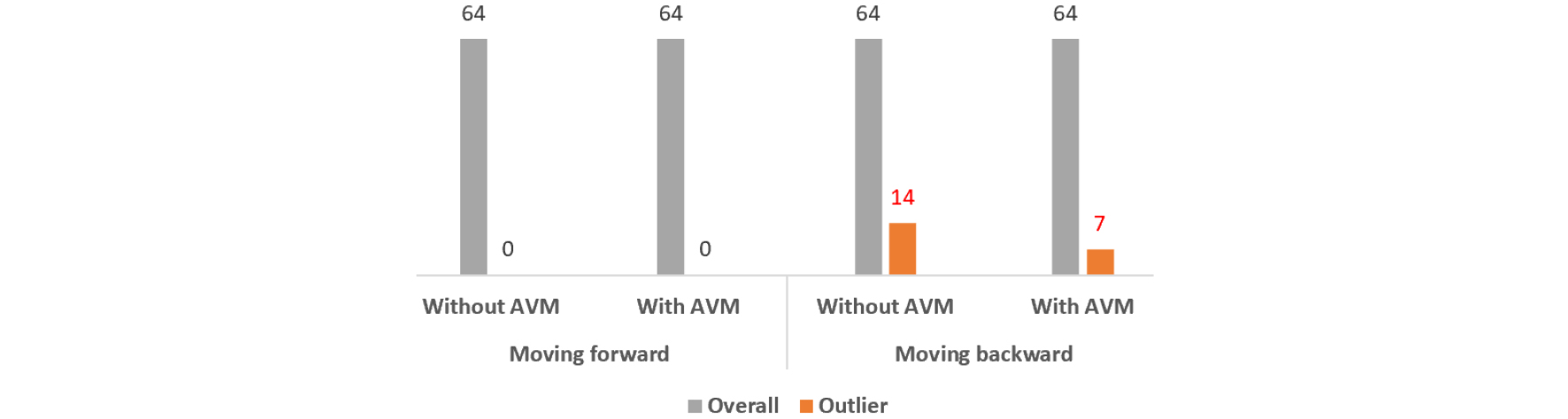
본 실험에서 얻어진 실험결과를 바탕으로 이상치 분석 데이터를 Table 5와 Fig. 7에 전진시와 후진시로 구분하여 나타내었다. 지게차 전진 시에는 이상치가 발견되지 않은 반면, 후진 시에는 AVM을 사용한 경우와 사용하지 않은 경우 모두에서 이상치 데이터가 발견되었다. 다만, 이상치 빈도는 AVM 미사용시 14회, 사용하였을 때에는 7회로서 이상치비율은 각각 21.9%와 10.9%로 나타났다. 즉, AVM 사용 시 장애물 미인지 횟수는 AVM 미사용시에 비해 절반으로 감소될 수 있음으로 해석된다.
Table 5.
Analysis of outliers in braking time with or without the use of the AVM system
이상치 데이터가 나타난 후진 시에 비해 전진 시에 이상치 데이터가 나타나지 않은 이유는 지게차에 짐을 싣지 않은 채 실험을 진행했기 때문인 것으로 생각된다. 이는 본 실험에서 전진 시에 전방 시야가 충분히 확보되므로 사각지대의 형성이 최소화된다. 따라서 지게차 조종사는 어라운드 뷰 기능의 사용에 관계없이 정면과 좌우를 쉽게 관측할 수 있고, 외부 자극을 쉽게 인지하여 이상치가 발생하지 않은 것으로 판단된다. 반면, 후진 시에는 어라운드 뷰 사용에 관계없이 조종사가 백미러를 보거나 뒤를 돌아보는 행동이 추가된다. 이를 통해 백미러로 보지 못하는 위치가 생기고 뒤를 돌아볼 경우에 돌아보는 방향의 반대쪽에 보지 못하는 위치가 생긴다. 따라서 후방에 대한 사각지대가 형성되어 외부자극을 발견하기 어렵게 되고 이상치가 발생하였다.
후진 시에 어라운드 뷰 기능을 사용하였을 때, 지게차 조종사가 모니터를 통해 사각지대를 최소화한 상황에서 외부자극을 인지할 수 있으므로 이상치가 감소한 것을 확인할 수 있다. 후진 과정에서 어라운드 뷰 사용 시에 지게차 조종사가 조종경로를 확인하기 위해 직접적으로 뒤를 확인하거나, 모니터 확인을 통한 후진의 미숙으로 인하여 외부자극에 대한 인지가 늦어져 이상치가 발생하였을 것이라 예측하였으며, 후진 시에 어라운드뷰 사용은 이상치 감소에 영향을 주는 것을 확인할 수 있었다.
본 실험은 실제 산업현장과 달리 지게차에 짐을 싣지 않은 채 진행된 실험이므로 실제와 다소 차이가 있는 한계가 있다. 하지만, 일반적으로 지게차 조종사의 전방 시야가 짐에 의해 가려지는 경우에는 본 실험의 후진주행과 같이 사각지대가 형성되고, 지게차 조종사들이 관습적으로 전진이 아닌 후진으로 주행한다. 충돌 사고는 대부분 수동 운행되는 지게차에서 작업자의 부주의로 발생한다.(13) 더구나, 후진 시에는 조종사의 시야확보가 어려워져 사각지대에 위치한 장애물과 충돌하기 쉽다.(14) 따라서, 실제 산업현장에서는 많은 비율의 지게차 사고가 운행 경로 범위로 들어오는 장애물을 사각지대로 인하여 보지 못하거나, 조종사가 현재하고 있는 작업에 집중하여 시야가 좁아져 장애물 인지문제로 발생한다. 이러한 사실은 본 분석에서의 평균제동시간보다는 이상치 데이터의 비율과 더 깊은 관련성이 있다고 볼 수 있다.
본 연구를 통해 어라운드 뷰 모니터링 시스템이 평균 제동시간에 미치는 영향은 크지 않은 것으로 나타났으나, 이상치에 해당하는 경우를 감소시켜 실제 산업현장에서 발생하는 지게차에 의한 부딪힘 및 끼임 사고를 예방함에 도움이 될 수 있을 것이라 예상된다.
4. 결 론
본 연구는 어라운드 뷰 모니터링 시스템의 사용/미사용에 따라 지게차 조종사가 외부 자극을 인지하여 지게차를 제동하기까지 걸리는 시간을 측정하고, 수집된 데이터를 분석, 비교를 통해 어라운드 뷰 기능이 지게차 제동시간에 영향을 주는지 확인하였다. 이를 통해 어라운드 뷰 기능의 사용이 실제 산업현장의 지게차 안전사고를 감소시키는 효과가 있는지 실험적 방법을 통해 알아보았다.
어라운드 뷰 기능의 사용/미사용에 따라 제동시간을 분석한 결과는 어라운드 뷰 기능의 미사용 시에 평균 제동시간은 0.84초, 사용 시에는 0.76초로 어라운드 뷰 기능의 사용 시에 평균 제동시간이 0.08초 더 짧게 나타났으나, 통계적으로 유의한 차이는 발생하지 않았다.
그러나 이상치(Outlier) 분석 시에 제동시간의 정상적인 범주를 초과하는 이상치는 상한치를 초과하는 1.54초 이상의 제동시간 데이터로 정의하였고, 256개의 제동시간 데이터 중 21개가 이상치에 해당되며 이상치데이터는 후진 시에만 발생함을 확인할 수 있었다. 또한 후진 시에 어라운드 뷰 미사용 시 14개가 이상치로, 사용 시 7개가 이상치임을 확인할 수 있었고, 사용 시에 비해 미사용 시에 2배 많이 발생하였다.
이상치는 지게차 조종사가 외부 자극을 인지하여 지게차를 정지하기까지 걸리는 시간이 정상적인 시간보다 많음을 의미하고, 이는 실제 산업현장에서 지게차 조종사가 장애물을 늦게 인지하여 부딪힘이나 끼임과 같은 재해가 발생할 수 있음을 의미한다. 따라서 지게차 후진 시에 어라운드 뷰 모니터링 시스템의 사용이 이상치를 감소시키는 것을 정량적으로 확인할 수 있었고, 이는 지게차로 인한 부딪힘, 끼임 등의 안전사고발생 감소효과가 있을 것이다.
