

1. 서 론
2. 인간 모사 학습 기반 구동기 고장 허용 제어 및 탐지 알고리즘
2.1. 인간 모사 적응형 되먹임 제어 알고리즘
2.2. 인간 모사 학습 알고리즘
2.3. 성능 지수 기반 구동기 고장 탐지
3. 성능평가 결과
4. 결 론
1. 서 론
자율주행은 교통수단이 사람의 조작 없이 스스로 판단하고 운행하는 시스템을 의미한다. 차량은 시간에 따라 성능이 저하되거나 혹은 예상치 못한 고장이 발생할 수 있다. 자율주행 자동차의 고장은 크게 세 부분으로 나누어질 수 있으며 이는 구동기 고장, 센서 고장 또는 설계된 알고리즘의 오류로 인한 고장이 존재한다. 구동기 고장을 예를 들면 자율주행을 위해 이용된 대상 차량이 전기 자동차인 경우 유도 전동기가 이용된다. 유도 전동기는 전기적, 기계적 및 환경적인 요인에 의한 고장이 발생될 수 있다.(1) 유도 전동기 기반 자율주행 차량에 앞서 언급된 구동기 고장이 발생하여 성능이 저하된다면 차량은 자율주행 제어 명령을 합리적으로 수행하는 것이 어렵다. 그러므로 자율주행 차량의 구동기 고장 안전을 위한 고장 탐지 및 고장 허용 제어 기술 개발은 중요하다. 이에 자율주행 차량의 주행 안정성 향상을 위해 대학들에서는 고장 탐지 및 고장 허용 제어 기술 개발 및 다양한 연구들이 진행되고 있다.
Jeon 등(2)은 전기 자동차의 구동기로 이용되는 인휠 모터 센서의 고장 탐지를 위해 고장에 따른 차량 동역학 모델의 외란 분석 및 패리티 방정식을 기반으로 센서 통합 고장 진단 알고리즘을 제안하였다. Abci 등(3)은 모바일 로봇 시스템의 센서 및 구동기 고장 안전을 위한 필터 뱅크 및 Kullback-Leibler Divergence 이론을 이용하여 고장 탐지 알고리즘을 개발하였다. Kommuri 등(4)은 영구자석 동기식 모터의 센서와 구동기 고장 안전을 위해 속도 임계값 및 고차 슬라이딩 모드 관측기 기반 고장 탐지 및 고장 허용 제어 알고리즘을 제안하였다. Mekki 등(5)은 모터 시스템의 고장 안전을 위해 슬라이딩 모드 관측기를 기반으로 모터의 고장을 재건하고 슬라이딩 모드 제어기를 이용하는 고장 허용 제어 알고리즘을 제안하였다. Karras 등(6)은 모바일 로봇의 구동기 고장 대응 및 장애물 회피를 위해 각 모터 휠에 계측되는 전류의 잔차 기반의 가중 행렬을 이용하여 모델 예측 제어기로부터 제약 조건을 고려하는 최적 구동 제어 입력 기반 고장 허용 제어 알고리즘을 제안하였다. Abci 등(7)은 휠 모바일 로봇의 구동기 고장 탐지를 위해 확장형 정보 필터(Extended Information Filter) 기반 고장을 추정하고 이를 되먹임하여 PI 제어기를 기반으로 고장 허용 제어를 수행하는 전략을 제시하였다. Zhang 등(8)은 4륜 이중 구동 모바일 로봇의 조향부 고장 대응을 위해 이중화된 휠을 이용하며, 체계 슬라이딩 모드 제어기(Fractional-Order Sliding Mode Control) 기반 목표 토크를 할당하는 구동 제어 알고리즘을 제시하였다.
자율주행 차량의 주행 안정성 향상을 위해서는 구동기 외에 센서에 대한 안전성 확보도 중요하다. 그러므로 센서 고장의 대응을 위한 기술 연구들도 지속적으로 진행되고 있다. Boukhari 등(9)은 횡방향 자율주행의 고장 안전을 위한 센서 고장 허용 제어 전략으로 디스크립터 관측기(Descriptor observer)를 이용하여 고장을 추정하고 PID 제어를 이용하여 고장을 포함하는 제어 입력을 도출하는 전략을 제안하였다. Realpe 등(10)은 자율주행 차량의 센서 고장 탐지 및 진단을 위해 차량에 부착된 센서들로부터 획득한 데이터들을 융합하여 map을 형성하고 기준 센서로 형성된 map 간의 데이터 차이를 SVM(Support Vector Machine)에 학습하여 고장을 탐지하는 알고리즘을 제안하였다. Fourlas 등(11)은 자율주행 모빌 로봇의 센서 고장 진단을 위해 휠 속도를 추정하는 칼만 필터를 설계하고 고장을 추정하는 고장 진단 알고리즘을 제안하였다. Jeong 등(12)은 자율주행 차량을 위해 센서와 구동기의 잔차의 경향을 파악하고 이를 분석하여 고장 탐지 알고리즘을 설계하였다. Edwards 등(13)은 센서 고장 허용 제어 전략을 위해 다중 슬라이딩 모드 관측기 기반 고장을 추정하고 슬라이딩 모드 제어기를 이용하여 허용 제어를 수행하는 전략을 제시하였다. Boukhari 등(14)은 자율주행 차량의 센서 고장 허용 제어 알고리즘을 위해 비례-미분(Proportional-Integral) 및 디스크립터 관측기를 이용하여 고장을 추정하고 추정된 고장을 되먹임하는 고장 허용 제어 알고리즘을 제안하였다. Tran 등(15)은 리튬 이온 베터리의 성능 저하의 대응을 위해 가중 이동 평균 필터 및 임계값을 이용하는 고장 탐지 알고리즘을 개발하였다.
기존 연구를 살펴보면 센서 고장에 대한 연구 사례들이 미흡하였으며, 센서 고장의 경우 디스크립터 관측기, SVM 및 칼만필터, 슬라이딩 모드 관측기, 가중 이동 평균 등의 이론들을 이용하여 센서 고장을 탐지하였다. 그리고 구동기 고장의 경우 고장 추정, 확장형 정보 필터, 차량의 성능 지수를 이용한 고장 탐지 방법들이 제안되었다. 또한 구동기 고장 허용 제어를 위해 슬라이딩 모드, 퍼지, H∞ 및 상태 되먹임 제어 방법들을 기반으로 고장 허용 제어 방법들이 연구되고 있음을 확인할 수 있다. 그러나 기존 알고리즘들은 정확한 모델이나 다양한 초기 파라미터들을 요구하는 것을 확인하였다. 이와 같은 한계점을 극복하기 위해 본 연구에서는 종방향 자율주행을 위해 실시간으로 인간의 학습 과정을 모사하여 학습을 수행하는 학습 알고리즘을 이용하는 적응형 구동기 고장 허용 제어 알고리즘을 제안한다. 또한, 구동기의 고장을 탐지하기 위해 성능 지수 기반 고장 탐지 알고리즘을 제안한다. 본 연구의 주된 연구 내용은 다음과 같이 요약될 수 있다.
1) 종방향 자율주행을 위한 인간의 학습 과정을 모방한 학습 알고리즘을 기반으로 적응형 구동기 고장 허용 제어 알고리즘 개발
2) 구동기 고장을 탐지하기 위해 구동기의 성능 지수 및 고장 단계를 판단하는 알고리즘 개발
구동기 고장 허용 제어를 위해 되먹임 제어 방법을 이용하여 요구 가속도를 출력한다. 요구 가속도는 적응 규칙을 이용하여 갱신된다. 가상 함수를 설계하고 적응형 규칙은 기울기 하강법(Gradient descent method)과 순환 최소 자승(Recursive least square, RLS)으로부터 계산되는 추정 계수들을 이용하여 설계되었다. 적응형 규칙과 거리 기반 함수 설계를 통해 제어 파라미터들이 자동 결정되도록 알고리즘을 설계하였고, 나머지 한 개의 제어 파라미터를 실시간 자동 갱신하기 위해 인간 모사 학습 알고리즘을 제안하였다. 인간 모사 학습 알고리즘은 퍼셉트론 학습 방법을 기반으로 설계되었다. 또한, 제안된 학습 알고리즘은 목적함수의 변화율에 따라 나머지 제어 파라미터를 유한 저장 공간에 저장 여부 및 기울기 하강법을 이용하여 파라미터 갱신 여부가 결정되도록 설계되었다. 구동기 고장 탐지는 Window 기반 성능 지수를 이용하여 고장을 탐지하고 고장의 단계를 구분한다. 성능 지수 도출을 위해 제어 오차로부터 Wiindow 기반 가중 표준 편차를 계산한다. 성능 지수는 0~100%의 값들을 선형적으로 나타내기 위해 설계 변수들과 실시간 계산되는 Window 기반 가중 표준 편차를 이용하여 설계되었다. 또한, 구동기 고장을 정상(Normal), 경고(Warning) 및 비상(Emergency) 단계로 구분하기 위한 임계값들을 정의하여 도출된 성능 지수를 기반으로 구동기 고장 단계를 구분하였다. 본 논문에서 제안된 알고리즘 평가를 위해 CarMaker를 이용하였다.
본 논문의 나머지 부분은 다음과 같이 구성되어 있다. 2 장에서는 적응형 구동기 고장 허용 제어 및 탐지 알고리즘에 대해 설명한다. 3 장에서는 제안된 알고리즘에 대한 성능평가 결과를 설명 및 분석하며, 4 장에서는 결론 및 한계점을 분석하고 연구의 향후 계획에 대해 기술한다.
2. 인간 모사 학습 기반 구동기 고장 허용 제어 및 탐지 알고리즘
2.1. 인간 모사 적응형 되먹임 제어 알고리즘
Fig. 1은 종방향 자율주행의 고장 안전을 위한 구동기 고장 탐지 및 인간 모사 학습 기반 적응형 고장 허용 제어 알고리즘의 모델 개략도를 보여준다.
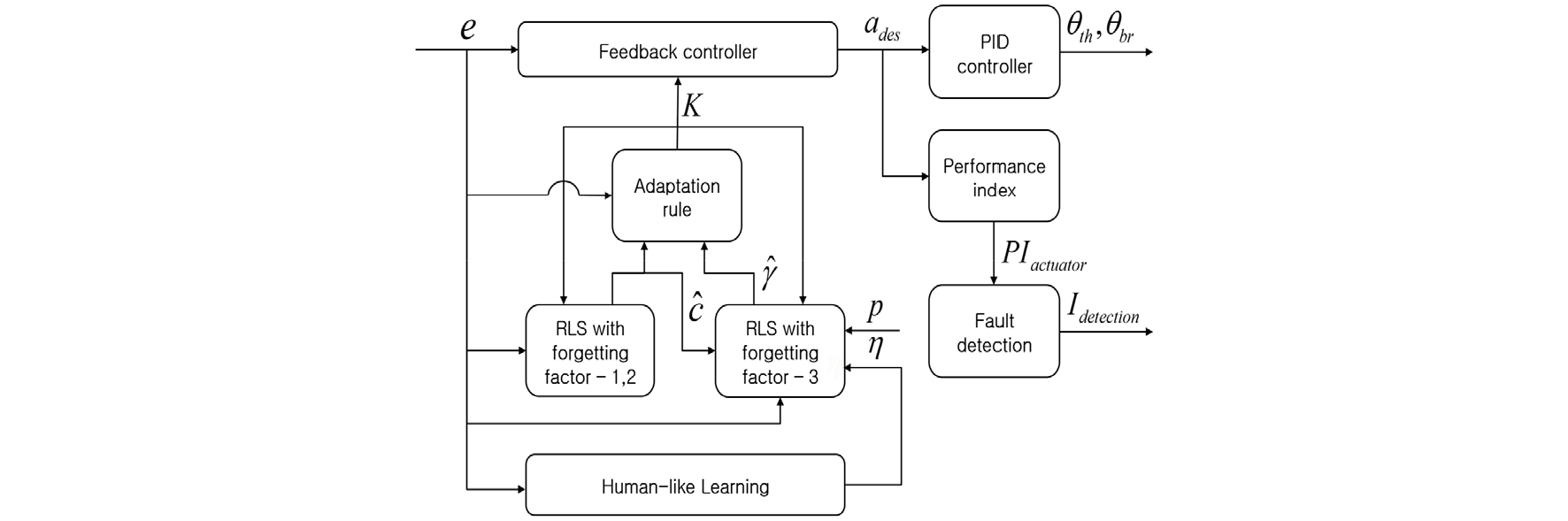
e는 상대거리 및 속도에 대한 제어 오차를 나타내며, K는 되먹임 이득을 나타낸다. 이들은 요구 가속도(ades)를 도출하기 위해 이용되었으며, 도출된 요구 가속도는 구동기 고장 허용 제어 및 고장 탐지를 위해 이용된다. 구동기 고장 탐지를 위해 요구 가속도와 현재 가속도간의 오차를 계산하고 표준 편차를 도출하여 성능 지수(PIactuator)를 출력하여 Fault detection 블록으로부터 고장 탐지 지수 Idetection를 도출한다. Idetection는 고장 단계에 따라 0~2의 값을 도출된다. 되먹임 이득 갱신을 위해 RLS with forgetting factor-1,2,3 블록들로부터 출력되는 추정치() 및 적응형 이득()이 이용되었다. 적응형 규칙으로부터 제어 파라미터 η는 실시간 도출되는 제어 오차를 이용하여 인간 모사 학습(Human-like Learning)을 이용하여 갱신되도록 설계되었다. 마지막으로 구동기 고장을 고려한 요구 가속도가 Feedback controller 블록으로부터 출력되고 PID 제어기로부터 쓰로틀 및 브레이크(θth, θbr) 제어 입력을 도출하였다. 자율주행 종방향 제어를 위해 요구 가속도는 되먹임 제어기로부터 다음과 같이 계산된다.
종방향 주행 상황에서 식 (1)에서 ecle, erel는 각각 선행 차량과의 상대 거리 및 상대 속도 오차를 나타낸다. 되먹임 이득은 적응 규칙을 기반으로 갱신되도록 설계하였고 오차 변화율과 상관관계를 가상 함수로 정의하였다. 적응 규칙 설계를 위해 정의된 가상 함수는 다음과 같다.
식 (2), (3)에서 C는 망각인자가 적용된 순환 최소 자승법을 이용하여 추정된다. Fig. 2는 C와 γ를 추정하기 위한 순환 최소 자승 모델의 모델 개략도이다.
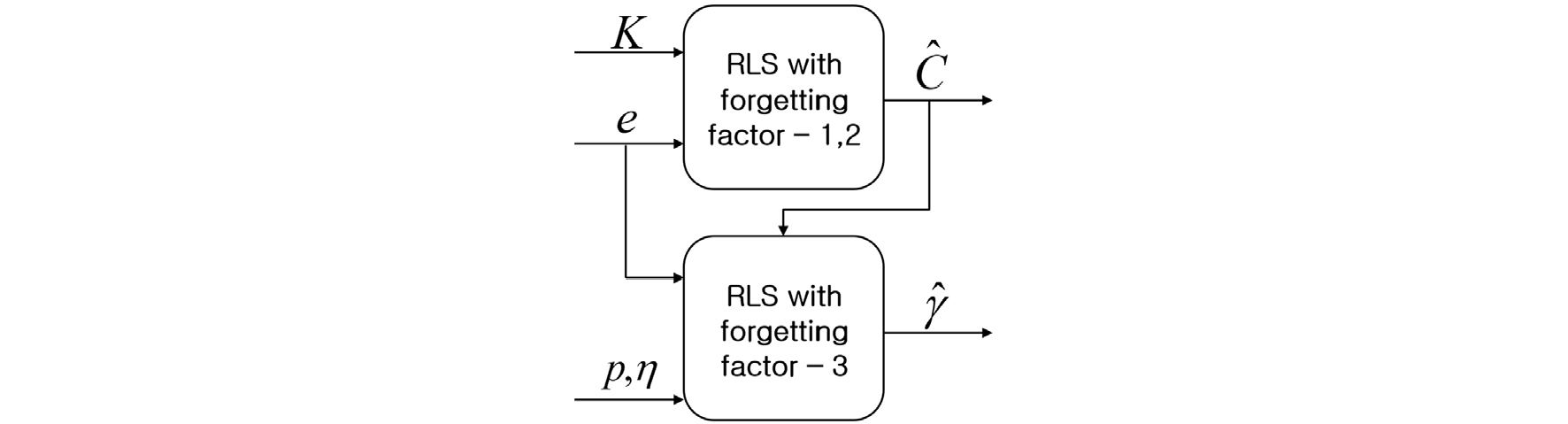
Fig. 2에서 보이듯이 는 되먹임 이득과 제어 오차 간의 가상 함수를 이용하여 도출되고 적응형 이득 는 제어 오차와 추정 계수 및 설계 변수 p와 η를 기반으로 추정된다. 계수 와 적응형 이득 의 추정을 위해 이용된 순환 최소 자승의 선형 관계식은 출력(Y), 복귀자(Φ), 추정치(Θ)로 구성되었으며 해당 식은 다음과 같다.
식 (4)의 추정치는 이득 및 공분산을 이용하여 갱신되고 다음 수식들을 기반으로 실시간 계산된다.
설계된 RLS 기반 도출된 추정 계수들은 적응형 되먹임 이득을 갱신하기 위해 이용되었다. 다음은 제어 오차와 가중치(W)를 이용하여 정의된 목적함수이다.
기울기 하강법을 이용하여 식 (4)의 목적함수를 되먹임 이득에 대해 편미분하면 다음과 같다.
식 (10)과 가상 함수를 이용하여 되먹임 이득의 시간에 대한 변화율로 재정리하였다. 식은 다음과 같이 나타낼 수 있다.
적응형 이득(γ)는 기울기 하강법에 제시된 방향으로의 크기를 나타낸다. 제어 파라미터의 차원을 최소화하기 위해 적응형 이득을 갱신한다. 적응형 이득 갱신을 위해 되먹임 이득의 변화율 크기와 제어 오차와의 관계식을 도출하였다. 도출된 거리 기반 가상 관계 함수는 다음과 같다.
식 (13)은 적응 이득 값을 갱신하기 위해 설계된 거리 기반의 조건식이며 제어 오차가 0일 경우 적응 이득 값이 0이 된다. 설계 변수 p는 1의 값으로 정의되었으며, 적응 이득 값들은 설계된 식 (13)의 관계식을 기반으로 순환 최소 자승을 이용하여 추정된다. 관계식 내 η는 적응형 이득 갱신을 위한 축소된 제어 파라미터로써 인간 모사 학습을 이용하여 갱신된다.
2.2. 인간 모사 학습 알고리즘
사람은 합리적 판단을 위해 과거의 경험으로부터 학습하는 것이 필요하다. 뇌가 미래의 결과를 좋은 결과를 보상받기 위해 어떻게 학습을 하는지에 대한 신경생물학을 이해하는데 연구가 진행된 바도 있다. Doherty 등(16)은 인간의 뇌에서 강화 학습 메커니즘 구조를 검토하였으며, 사람이 좋은 결정을 내리기 위해서는 과거의 경험으로부터 배우는 것이 유익함을 확인하였다. 이처럼 사람은 미래에 성공 혹은 실패를 겪는다. 만약 실패를 거듭하여도, 이는 뇌에 일부분에 자리 잡아 망각에 영향을 받지 않는 한계 내에서는 성공을 위한 과정을 거듭할 것이다. 그러므로 본 연구에서는 적응형 구동기 고장 허용 제어 알고리즘의 최소화된 제어 파라미터 η를 갱신하기 위해 인간의 학습 방법을 모사한 학습 알고리즘을 제안한다. Fig. 3은 제안된 인간 모사 학습 알고리즘의 개념도를 나타낸다.
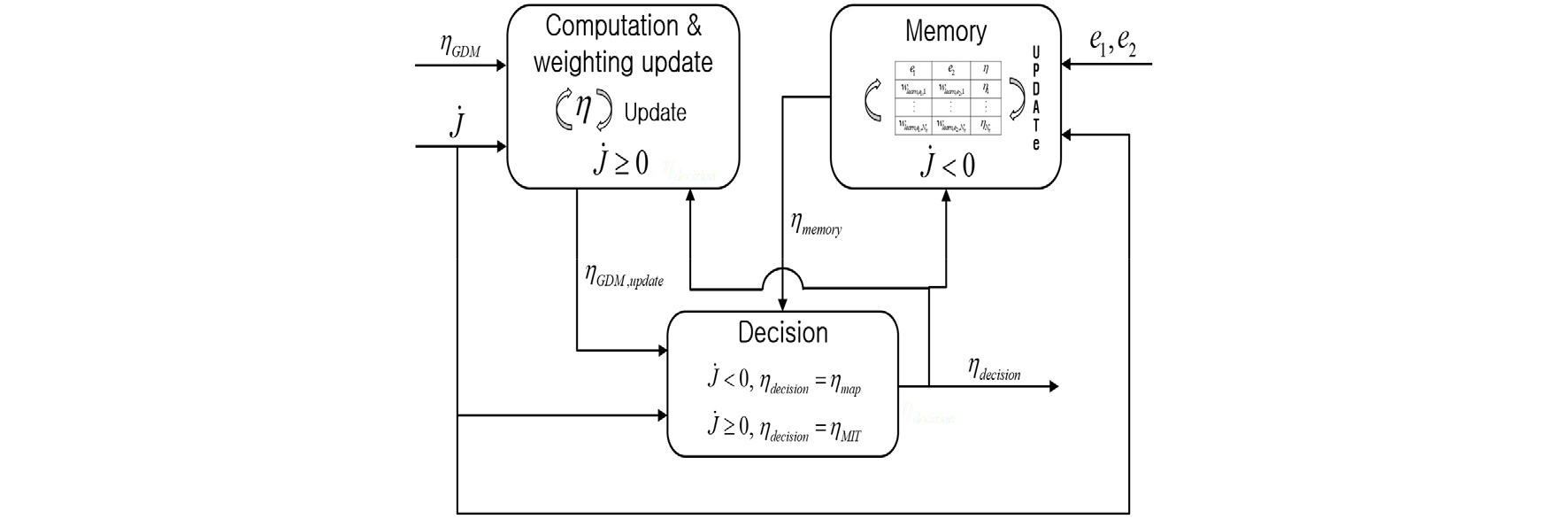
Fig. 3에서 인간 모사 학습 알고리즘은 퍼셉트론 학습 방법을 이용하여 설계하였으며, 초기 η는 설계자에 의해 결정된다. 인간 모사 학습 알고리즘에서 가중치 갱신 및 Memory 내에 데이터 저장 여부는 목적함수 변화율의 부호에 따라 결정된다. η는 목적 함수의 변화율에 따라 학습을 위한 가중치가 기울기 하강법을 이용하여 갱신되고 Memory에 저장된 데이터들은 제어 오차들과 η이다. 데이터 저장은 Window의 크기를 고정 값으로 설계하여 데이터의 크기가 제한된 범위 Nη를 넘지 않도록 제한하였다. 종방향 자율주행을 위한 ηdecision을 출력을 위해 인간 모사 학습의 Decision 규칙을 정의하였다. ηdecision은 목적함수의 변화율에 따라 기울기 하강법을 이용하여 도출된 ηGDM 혹은 Memory에 의해 출력된 ηMemory로 결정된다. η를 출력하기 위한 활동함수는 다음과 같다.
식 (17)은 시그모이드 함수를 이용하여 설계되었다. r은 도출되는 출력의 범위 설계를 위한 변수이고 본 연구에서는 1로 적용하였다. η는 목적함수의 변화율이 음수라면 갱신되지 않는다. 반면 목적함수 변화율이 0을 포함한 양수일 경우 가중치를 조정하고 η를 갱신한다. 과 과의 관계로부터 를 추정하고 갱신의 방향성을 결정을 위해 이용하였다. η 갱신을 위한 수식 및 갱신의 방향성을 결정하는 ηsign는 다음과 같다.
인간 모사 학습 알고리즘에서의 학습률은 ε로 나타내고 목적함수 변화율의 부호는 갱신 및 저장 여부를 결정한다. 기술된 Decision rule은 아래와 같다.
식 (22)와 같이 목적함수의 변화율이 음수 조건에서는 데이터들이 저장되고 저장된 데이터들은 현재 제어 오차와 비교하여 과거의 η를 선택적으로 재사용한다.
2.3. 성능 지수 기반 구동기 고장 탐지
구동기 고장 탐지를 위해 성능 지수를 설계하였으며, 성능 지수는 현재 자차량의 가속도와 요구 가속도 간의 오차를 이용하여 계산되었다. 구동기에 고장이 발생한 경우 성능이 저하되어 상위 제어기로부터 출력되는 요구 가속도를 추종하는 것이 어려우며, 제어 오차의 크기는 증가하게 된다. 이와 같은 현상을 이용하여 성능 지수를 이용한 고장 탐지 알고리즘을 설계하였으며, Fig. 4는 본 연구에서 제안하는 고장 탐지 알고리즘의 개념도이다.
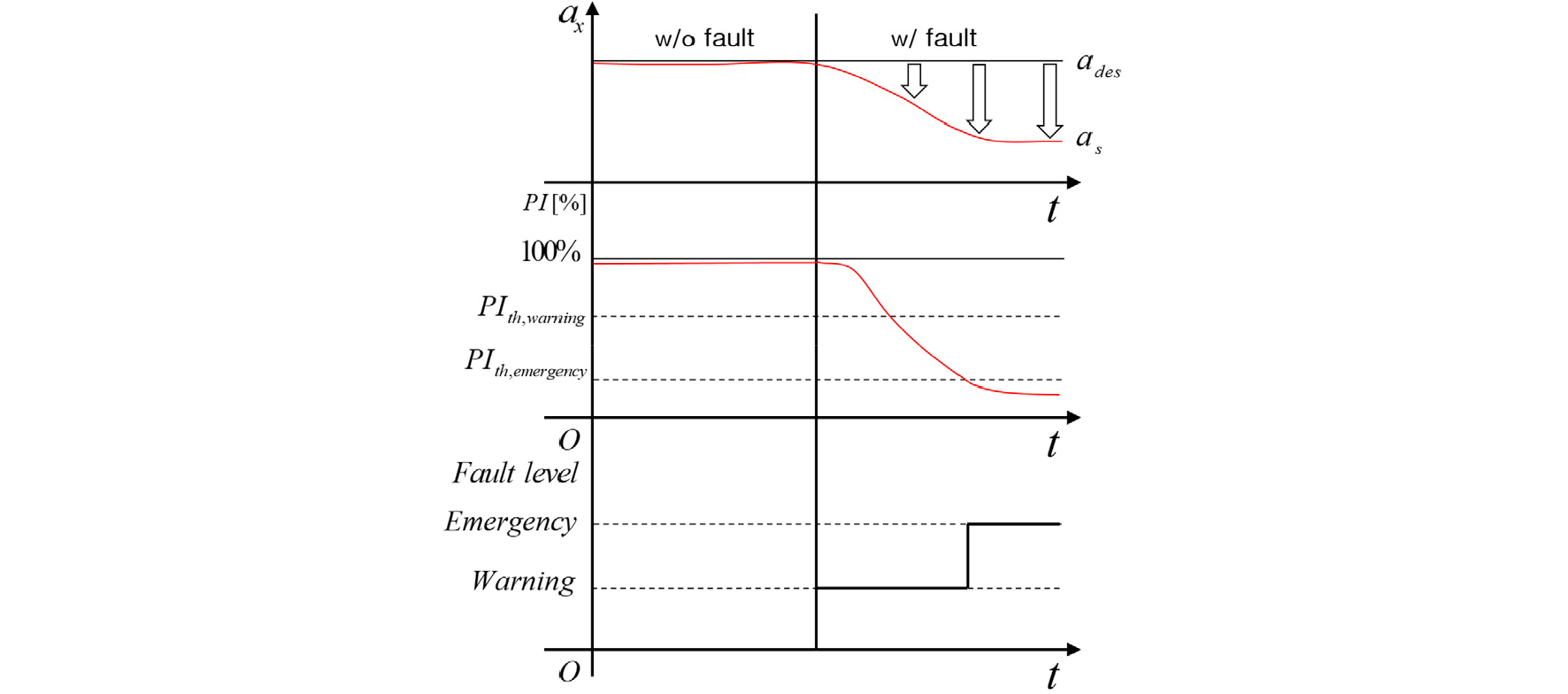
Fig. 4에서 고장이 발생한 시점으로부터 성능지수는 100% 이하의 값을 갖는다. 그리고 두 개의 성능지수 한계 값을 정의하여 고장의 단계를 인지할 수 있도록 설계하였다. 성능 지수를 도출하기 위해 실시간으로 오차에 대한 표준 편차를 계산하고, 과거 데이터에 대한 영향력을 줄이기 위해 Nwindow개의 데이터를 갖는 Window와 가중치를 적용하였다. 적용된 가중치는 0~1의 값이 도출되도록 5차 함수가 이용되었으며, Fig. 5에서 5차 함수를 이용한 가중치 함수 결과를 보여준다.
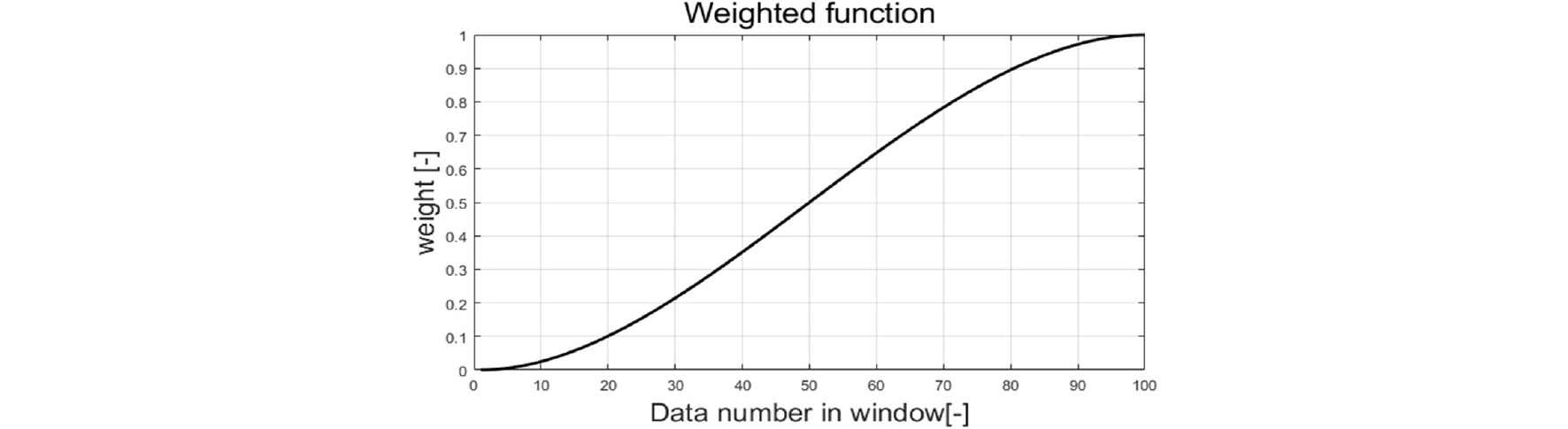
Fig. 5에서 정의역은 Window 내 n번째 데이터 번호를 의미한다. 가중치는 현재의 데이터와 가까울수록 1에 가까운 값을 갖는다. 성능 지수를 계산하기 위한 표준 편차는 식 (24)와 같이 계산된다.
식 (24)에서 μ는 Window 내에서 계산된 데이터 평균을 나타내며, 부드러운 성능 지수를 도출하기 위해 시정수 τ를 이용하여 1계 도함수가 적용된 가속도 오차 eacc를 식 (26)과 같이 계산한다. 식 (27)에서 5차 함수의 계수 a1, a2, a3, a4, a5, a6는 각각 -2.58×10-11, -7.74×10-9, -2.84×10-6, 3.39×10-4, -6.7×10-4, 4.34×10-4으로 적용되었다. 성능지수는 구동기가 정상 성능을 갖는 상태일 때의 표준 편차 3배 값(σth)과 표준 편차의 최댓값(σmax)을 이용하여 계산된다. 정의된 임계값에 따라 성능 지수가 계산되며, 성능 지수 도출을 위한 경계 조건들을 다음과 같이 정의하였다.
도출된 성능지수를 이용하여 구동기 상태를 정상(Normal), 경고(Warning) 및 비상(Emergency) 임계값에 따라 고장을 구분하도록 고장 탐지 알고리즘을 설계하였다. 앞서 언급된 고장 단계에 따라 고장 탐지 알고리즘으로부터 도출된 고장 탐지 지수 Idetection은 다음과 같은 값을 갖도록 설계되었다.
위 식들과 같이 도출된 성능 지수에 따라 구동기 고장이 탐지된다. 다음 절에서는 본 논문에서 제안하는 인간 모사 학습을 이용하는 적응형 구동기 고장 탐지 및 허용 제어 알고리즘에 대한 성능평가 결과를 기술하고 분석한다.
3. 성능평가 결과
본 논문에서 제안하는 인간 모사 학습 기반 적응형 고장 허용 제어(AFTC) 및 탐지 알고리즘의 합리적인 평가 및 분석을 위해 Matlab/Simulink와 상용 소프트웨어 CarMaker를 이용하였다. 다양한 성능평가 및 결과 분석을 위해 성능평가는 스텝(Step), 램프(Ramp), 위브(Weave) 형태의 요구 속도를 추종하는 시나리오를 적용하였으며, 차량은 CarMaker에서 제공되는 BMW 5 시리즈를 이용하였다. 제안된 알고리즘의 평가 결과는 선형 2차 조절기(LQR) 적용 결과와 비교되었다. 구동기 고장을 모사하기 위해 하위 제어기로부터 도출된 제어 입력에 비례 계수를 적용하여 작은 입력 값이 인가되도록 하였다. Table 1은 성능평가를 위해 이용된 파라미터이다.
Table 1.
Parameters used for performance evaluation
Table 2는 적용된 시나리오 및 주행 조건들이며, 모든 주행 시나리오들은 직진 주행을 위해 CarMaker에서 제공되는 운전자 모델을 적용하였다.
Table 2.
Driving scenarios and conditions for performance evaluation
Table 1과 2에서 기술된 파라미터 및 시나리오들이 적용된 평가 결과를 도출하였으며, Fig. 6~19는 AFTC 및 LQR을 이용하여 스텝 형태의 요구 속도를 추종하는 성능평가 결과이다.
Fig. 6~8은 제안된 AFTC와 LQR의 요구 속도 및 상대 거리 추종 결과들이다. 35~60초에서 구동기 고장이 주입 되었음에도 불구하고 AFTC가 적용된 결과의 경우 요구 속도를 합리적으로 추종하는 것을 확인하였다. 반면 LQR의 경우 요구 속도 대비 현재 차량의 속도가 약 10kph 차이를 갖는 것을 확인하였다. 상대 거리의 경우에도 LQR은 최대 약 15m AFTC는 최대 약 1m의 차이를 갖는 결과를 보였다. Fig. 9와 10에서 순환 최소 자승으로부터 도출된 추정 계수와 적응형 이득을 보여준다. 고장 허용 제어를 위한 제어 파라미터 η는 Fig. 11과 Fig. 12에 학습을 위한 가중치들로부터 Fig. 13과 같이 갱신된 결과를 보였다. Fig. 14는 목적함수의 값이며, 고장이 적용된 35~60초에서 오차가 커지므로 목적함수의 값도 커진 결과를 확인하였다. Fig. 15에서 갱신된 적응형 이득으로부터 요구 가속도를 도출하기 위한 되먹임 이득들이 계산된 결과를 확인할 수 있다. 고장 허용 제어를 위해 제안된 AFTC로부터 계산된 요구 가속도와 LQR로부터 출력된 요구 가속도는 Fig. 16에서 확인할 수 있다. Fig. 17은 도출된 가속도 오차 결과로 이를 기반으로 Fig. 18과 같이 성능 지수를 계산하기 위한 표준 편차를 계산하였다. 계산된 표준 편차를 기반으로 성능 지수는 Fig. 19와 같이 도출되었다. 성능 지수로부터 구동기 고장은 AFTC의 경우 36.56초 LQR은 38.32초에 고장이 탐지된 결과를 보였다. 또한, 고장 탐지 시점은 실제 적용된 고장 시점과 각각 1.56초 및 3.32초의 차이를 보이는 것을 확인할 수 있다. Fig. 20~33은 램프 형태의 요구 속도를 추종하는 성능평가 결과들이다.
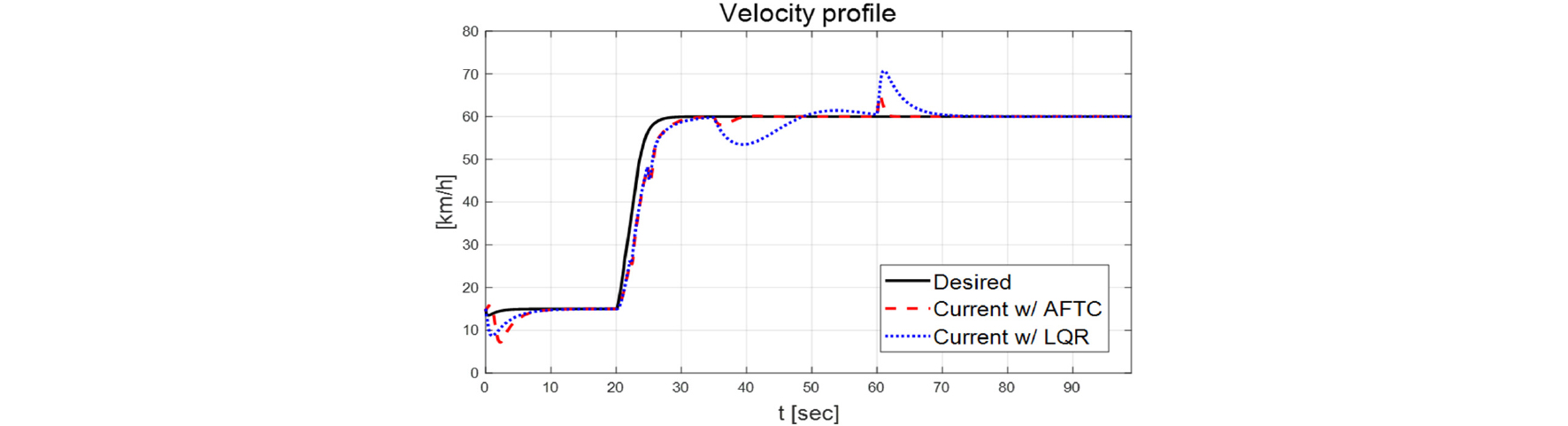
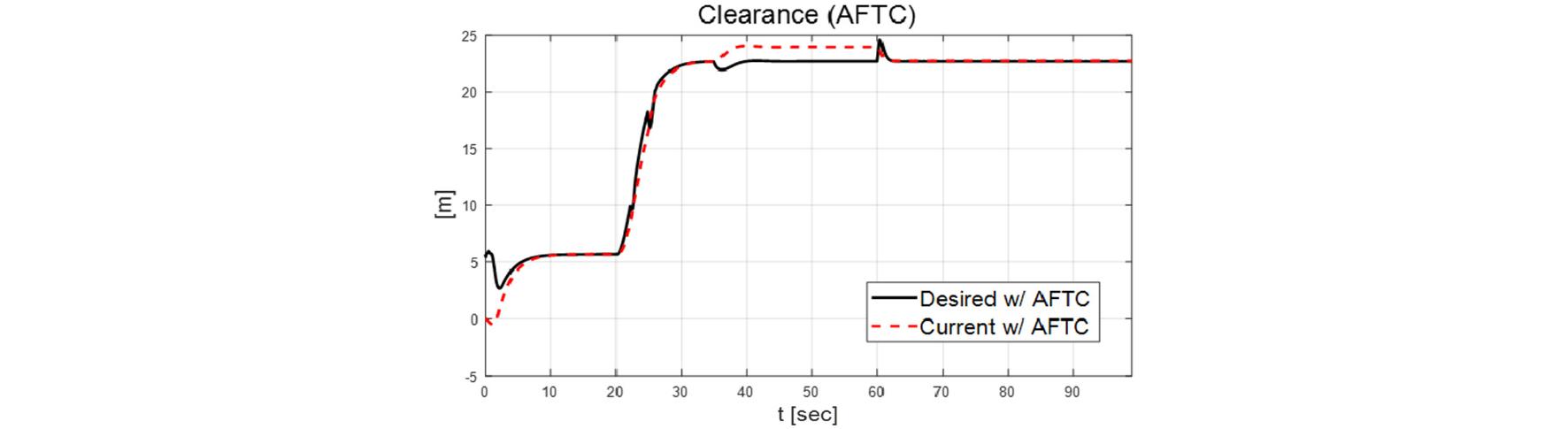
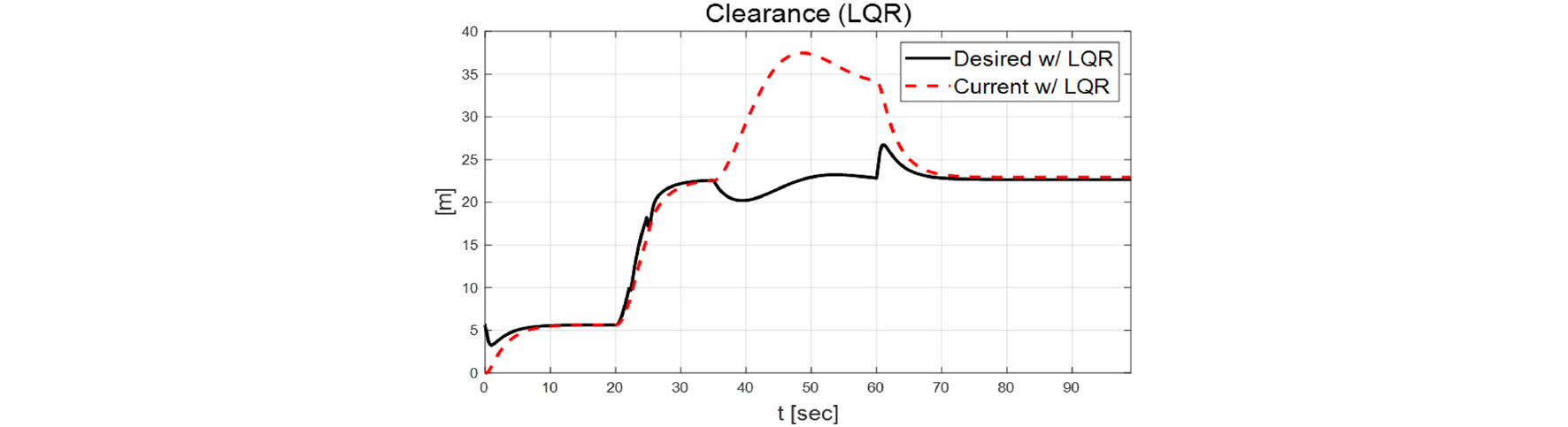
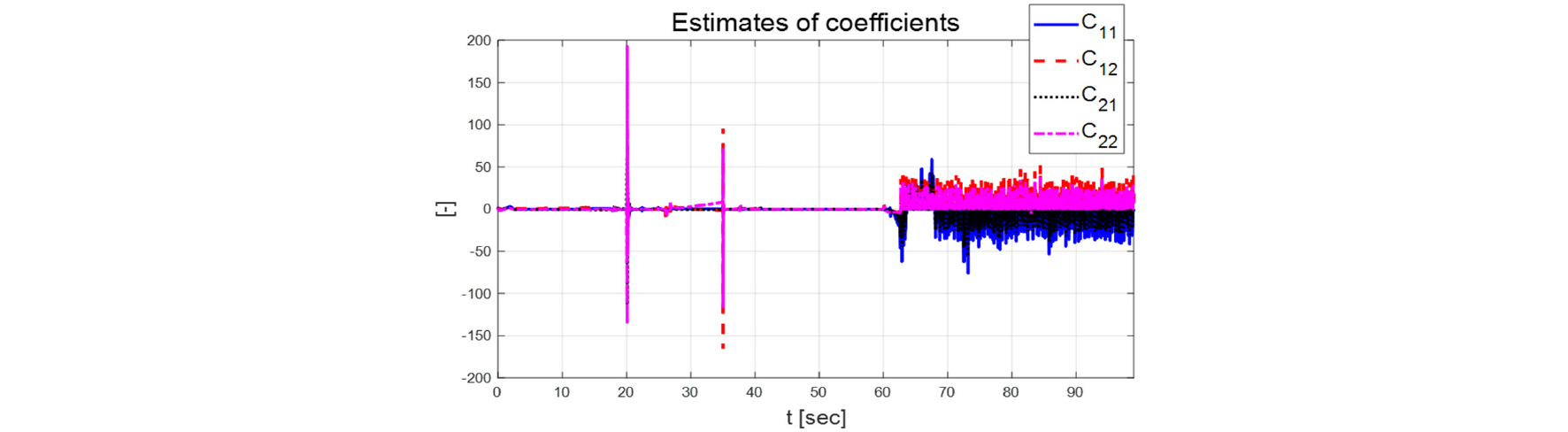

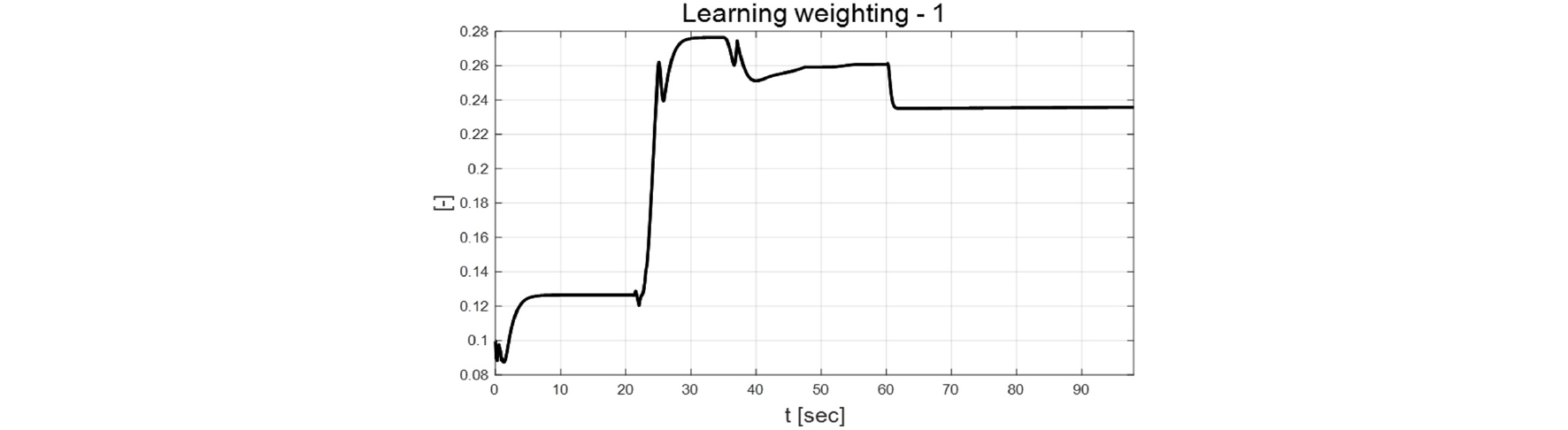
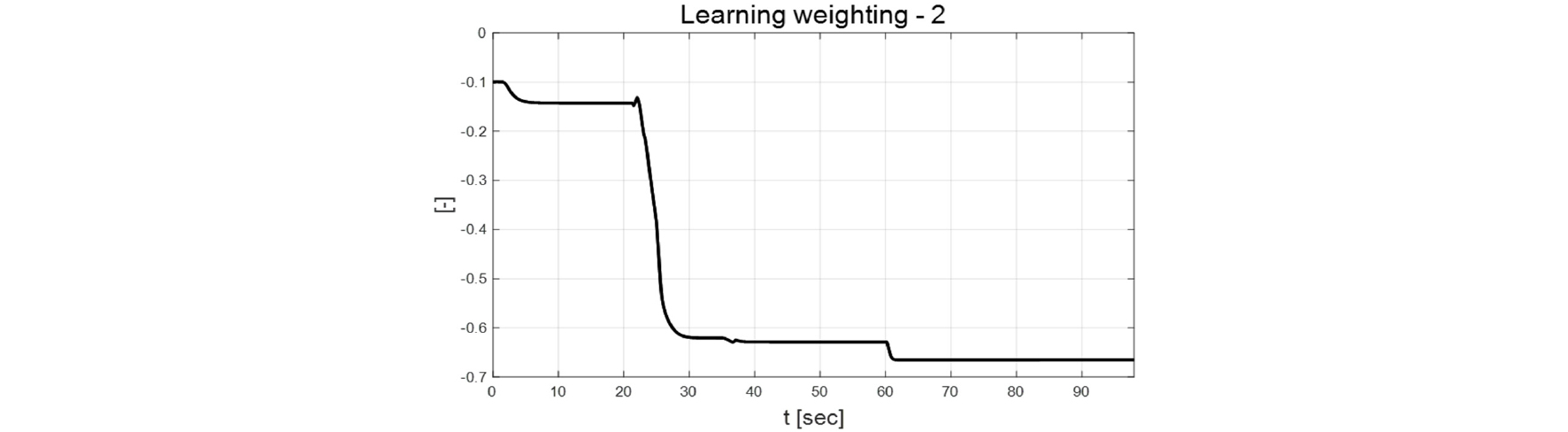
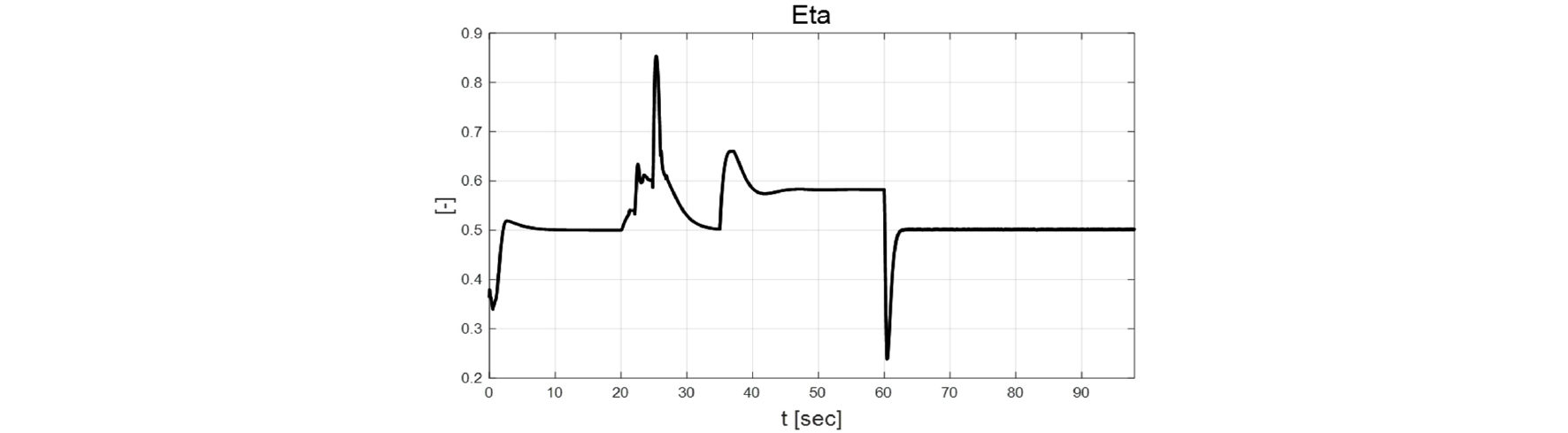
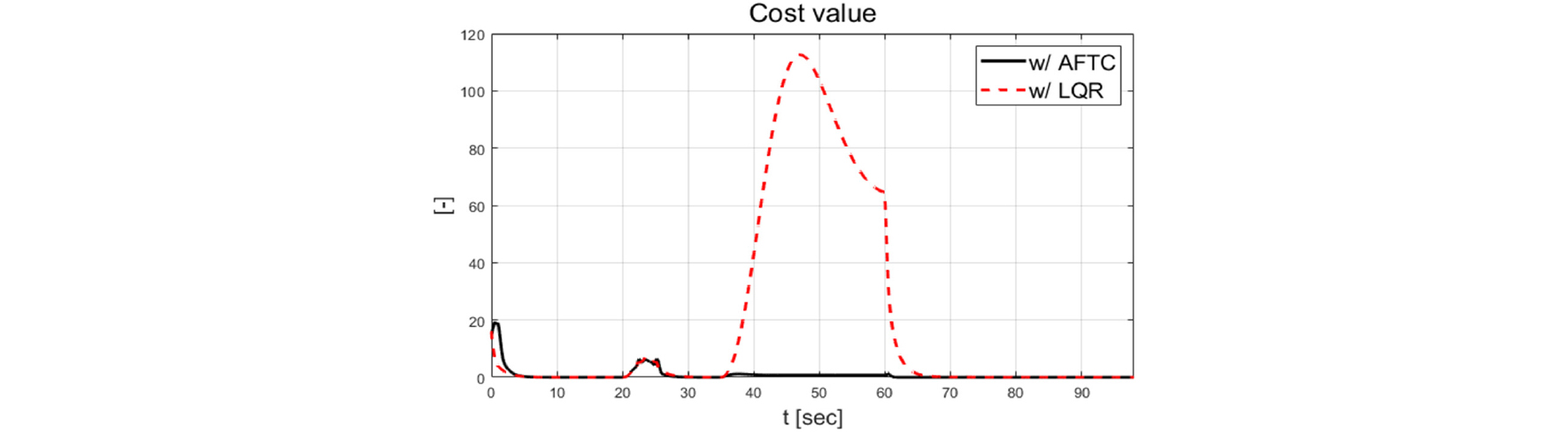
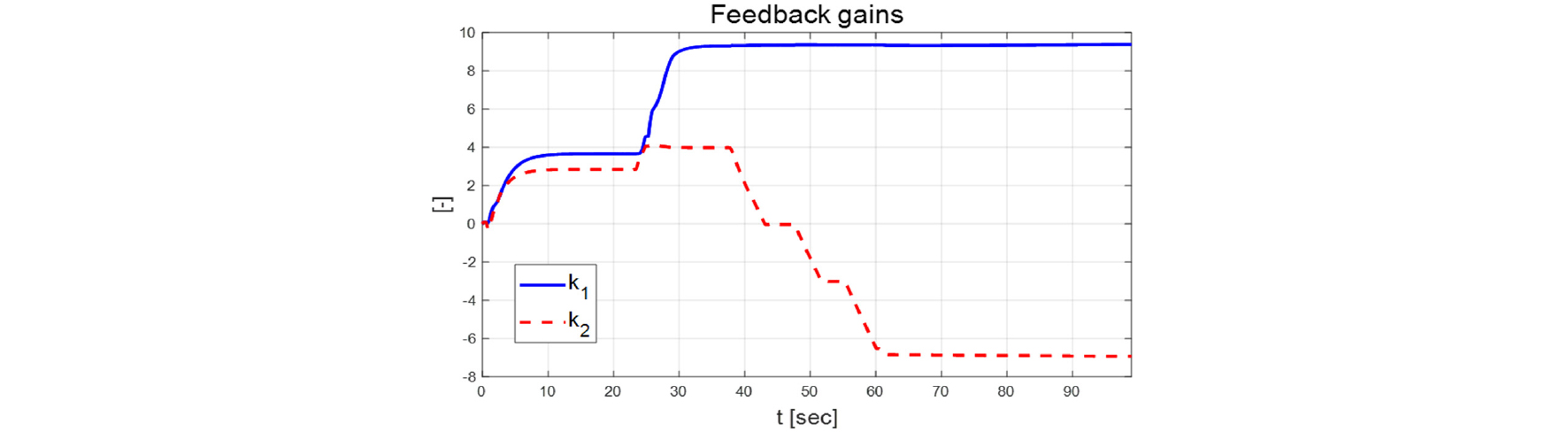
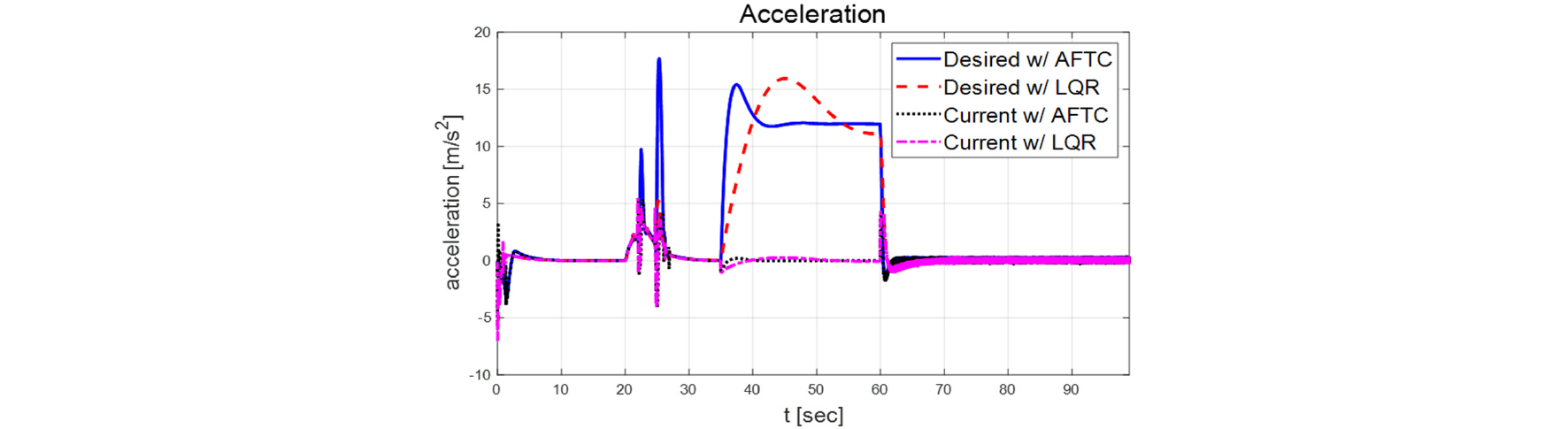
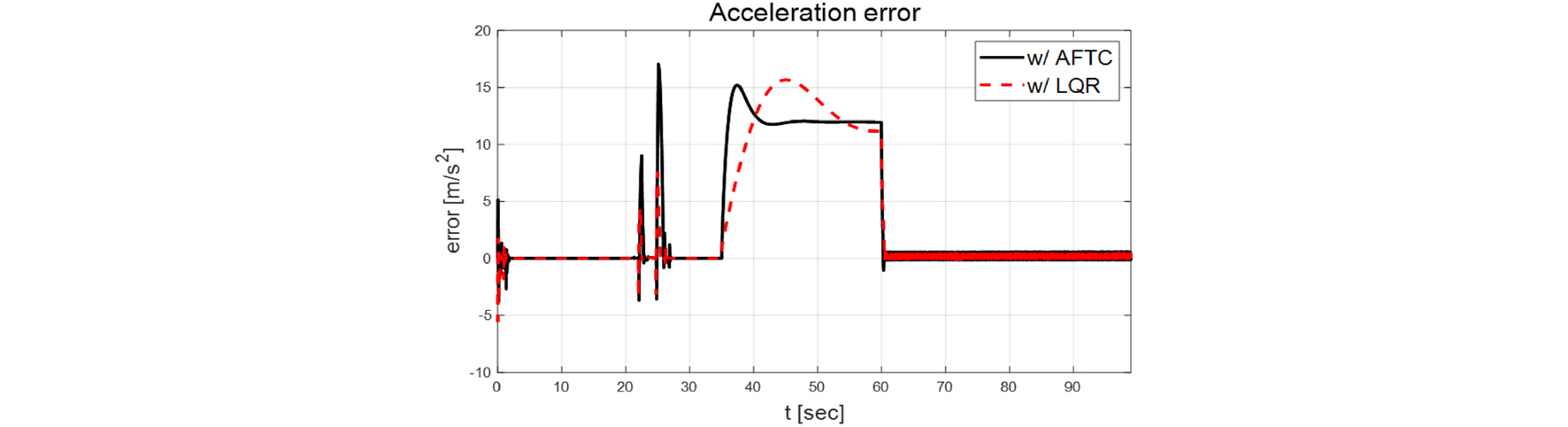
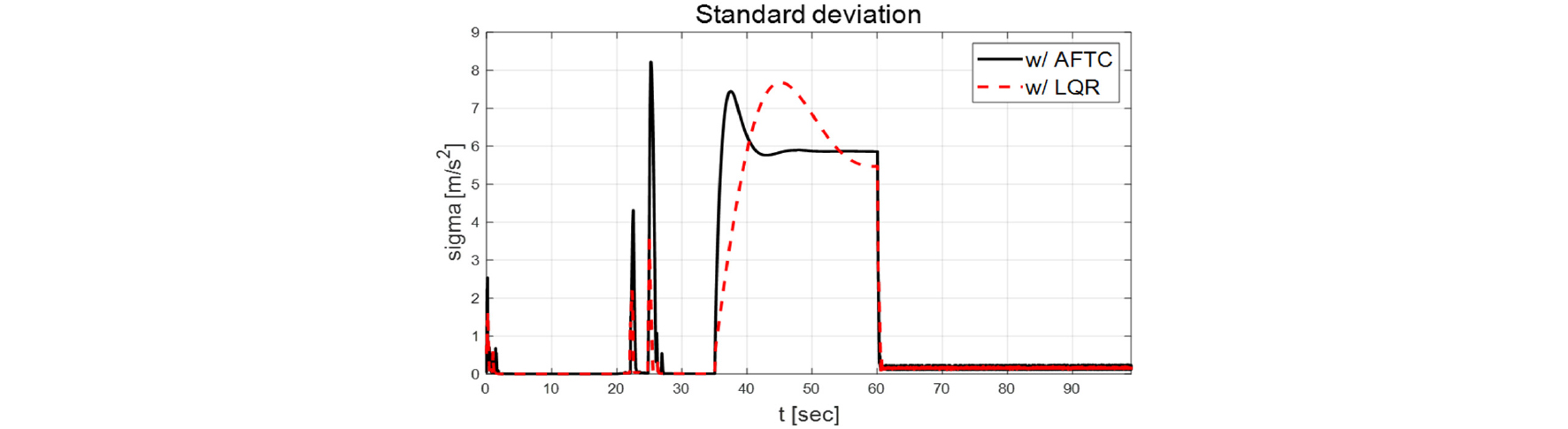
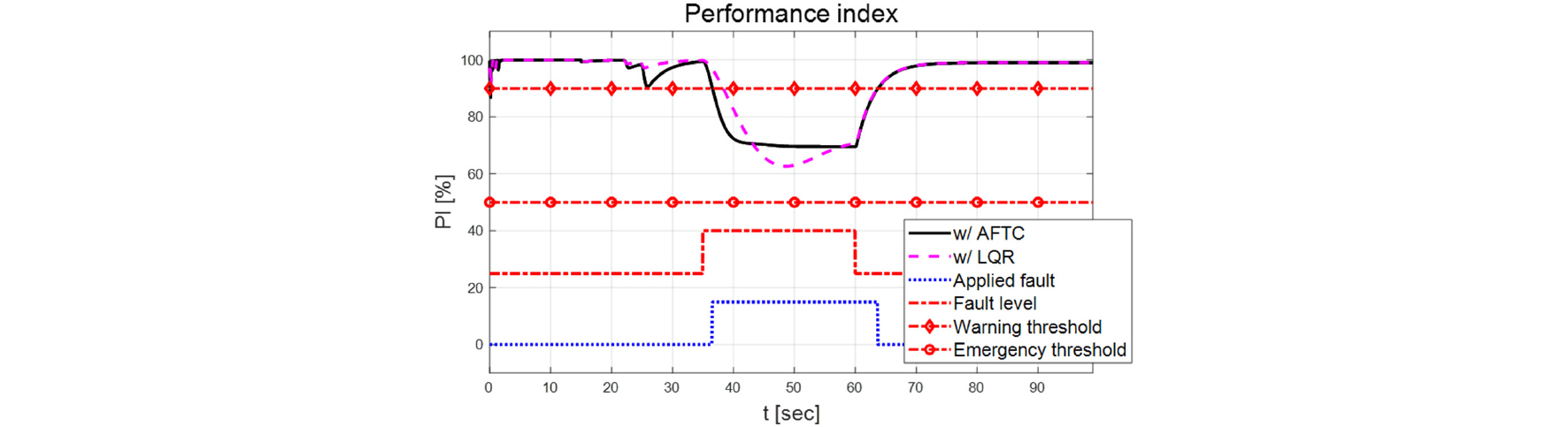
Fig. 20~22는 AFTC 및 LQR을 이용하여 요구 속도 및 상대거리를 추종한 결과이며, AFTC는 고장이 있음에도 불구하고 합리적인 추종 결과와 LQR은 속도는 최대 10kph 상대 거리는 최대 10m의 오차를 보였다. Fig. 23과 24는 순환 최소 자승을 기반으로 추정 계수와 적응형 이득의 추정 결과이다. 또한, 적응형 이득을 추정하기 위한 제어 파라미터 η에 대한 결과를 Fig. 27에서 확인할 수 있다. η를 갱신하기 위해 인간 모사 학습을 위한 학습 가중치는 Fig. 25와 26과 같은 결과들을 보였다. AFTC와 LQR은 목적함수의 값은 Fig. 28과 같은 결과를 확인할 수 있다. 이에 되먹임 이득은 고장 허용 제어를 위해 Fig. 29와 같은 결과들을 갖는다. 계산된 되먹임 이득을 이용하여 요구 가속도는 Fig. 30과 같은 결과들을 보였다. 요구 가속도와 현재 가속도 간의 오차는 Fig. 31과 같은 결과를 보였으며, 이를 이용하여 계산된 표준 편차는 Fig. 32와 같다. Fig. 33은 고장 탐지를 위한 성능 지수이며, 표준 편차를 이용하여 계산된 결과이다. Fig. 33에서 성능 지수를 이용하여 고장이 탐지된 것을 확인할 수 있으며, AFTC의 고장 탐지 시점(37.63초)과 LQR의 고장 탐지 시점(39.20초)은 실제 고장 시점(35.00초)와 각각 2.63초와 4.20초의 차이를 보이는 것을 확인하였다. Fig. 34~47은 위브 형태의 요구 속도를 추종하는 성능평가 결과들이다.
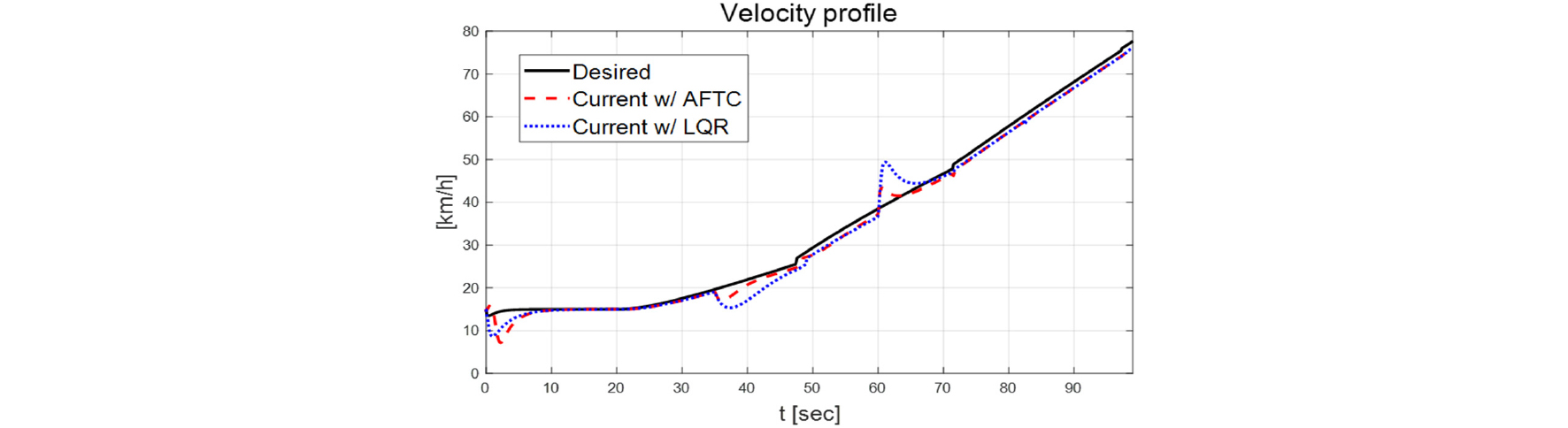
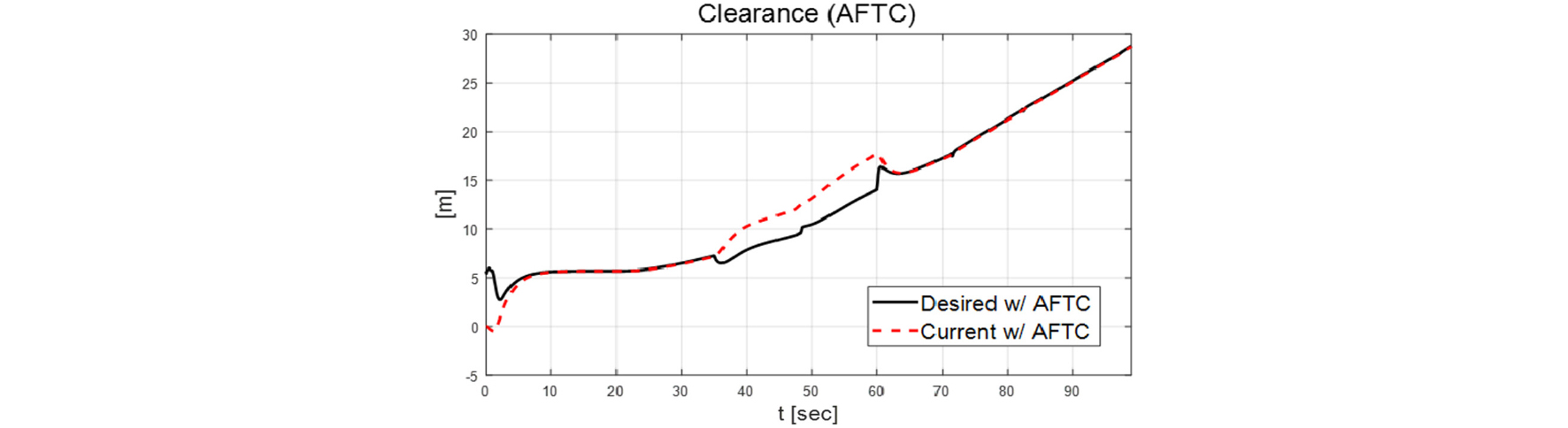
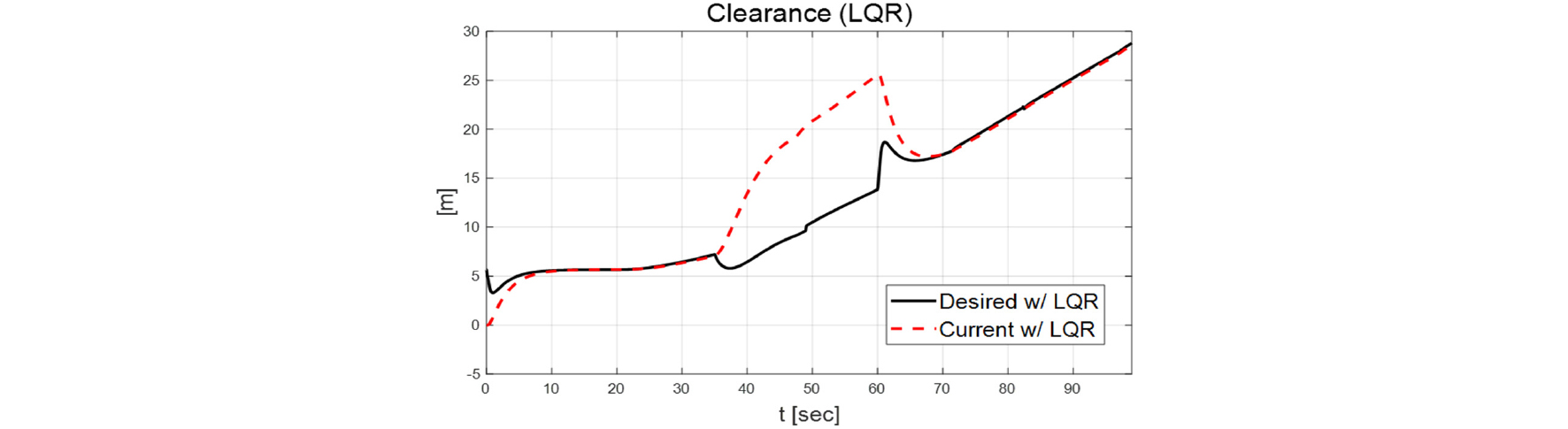
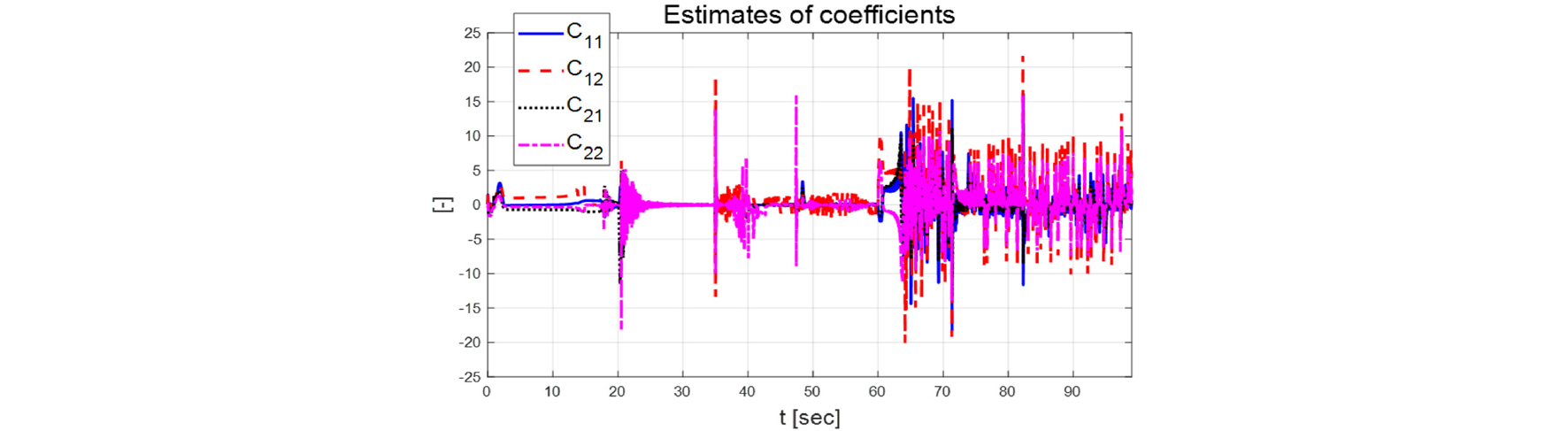
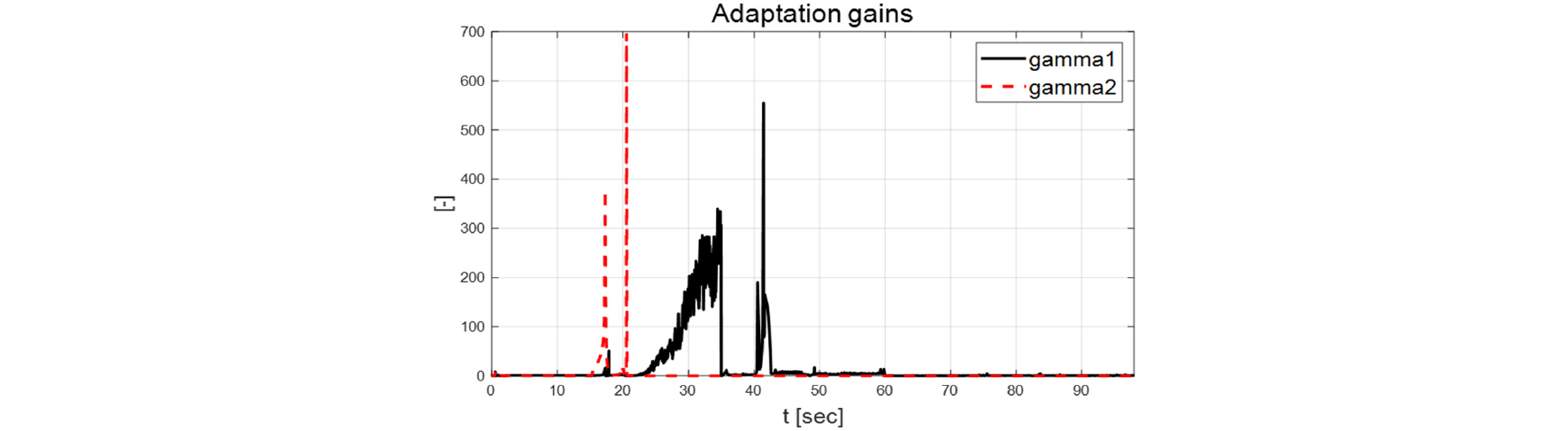
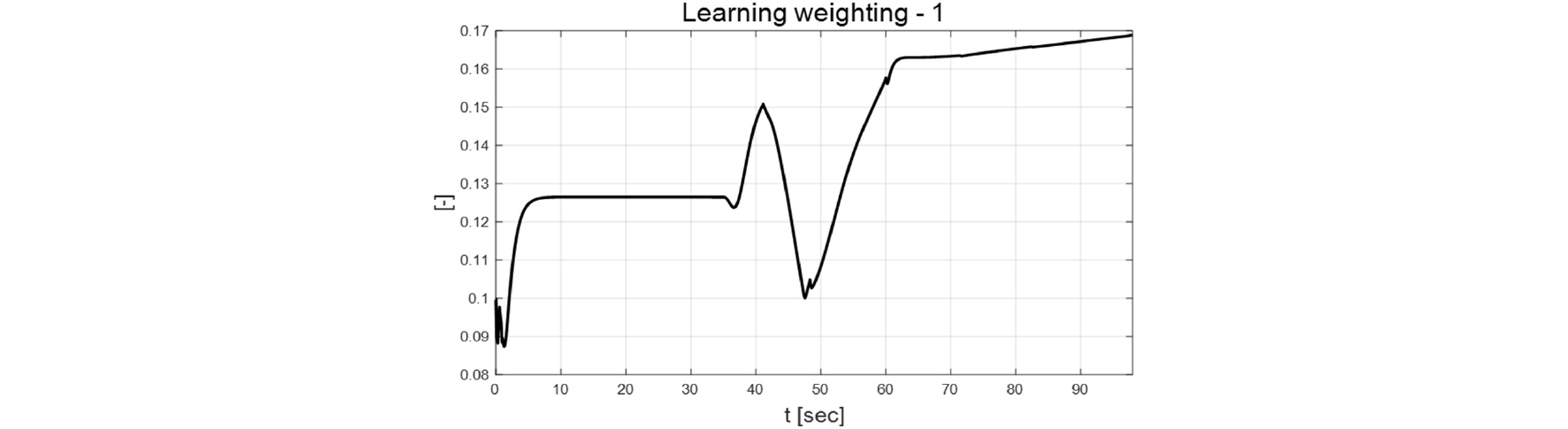
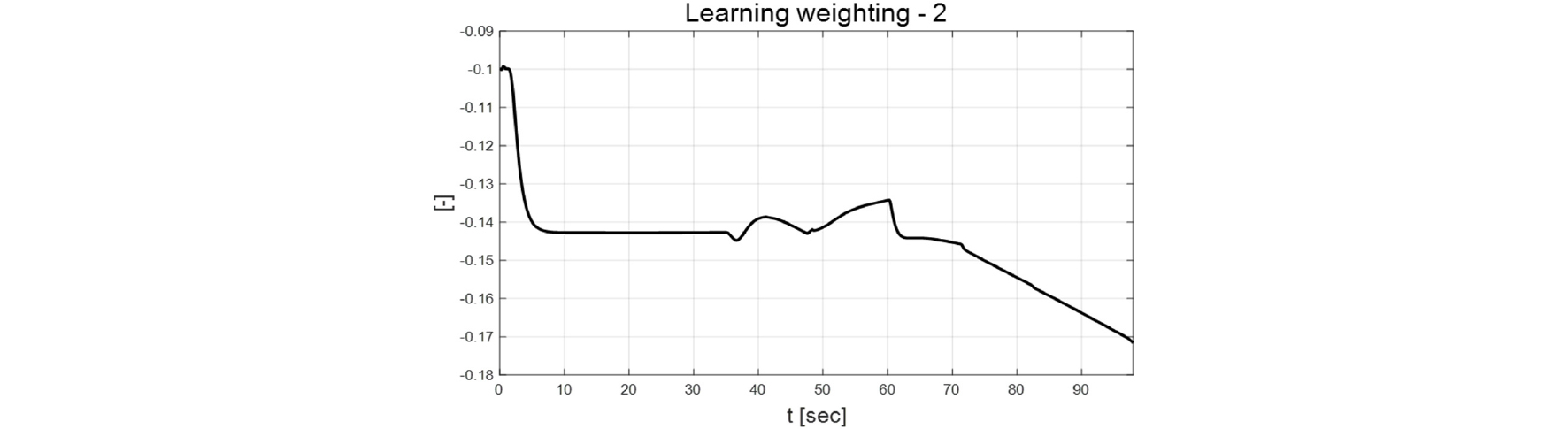
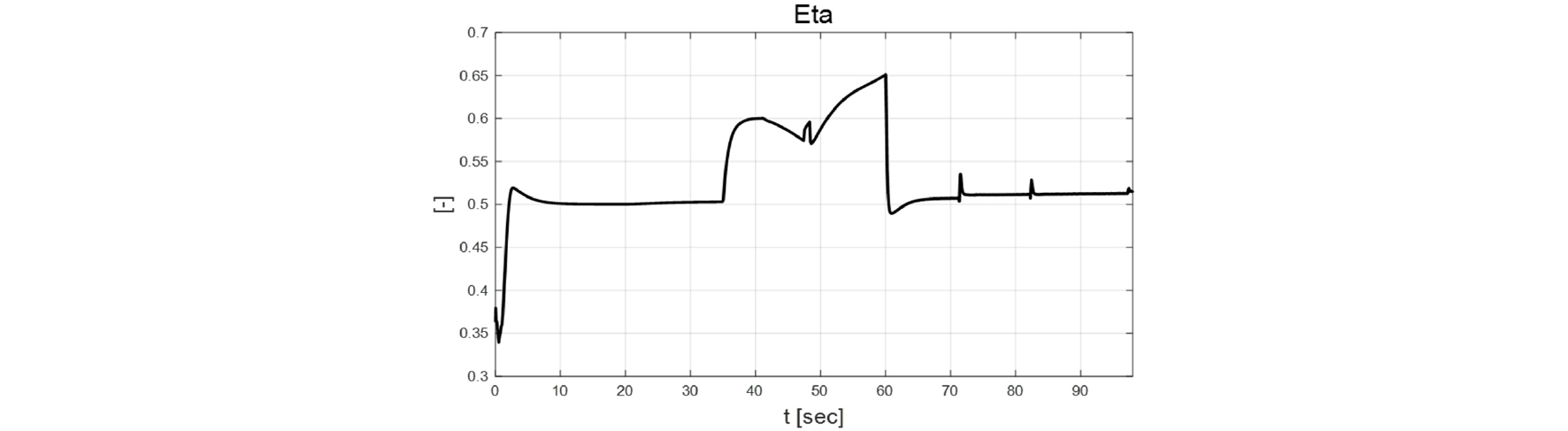
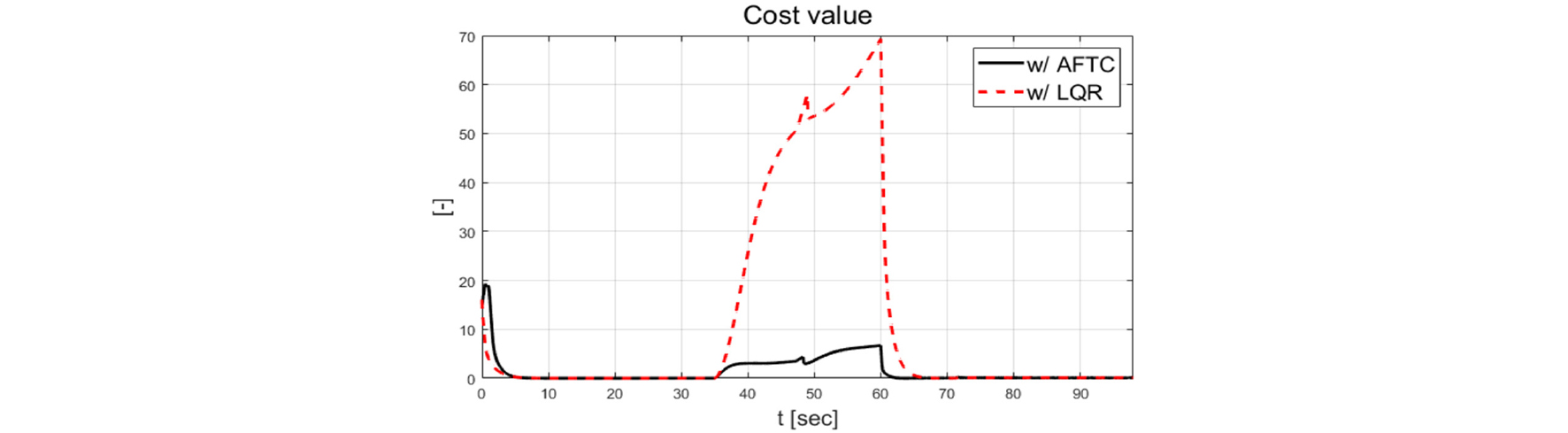
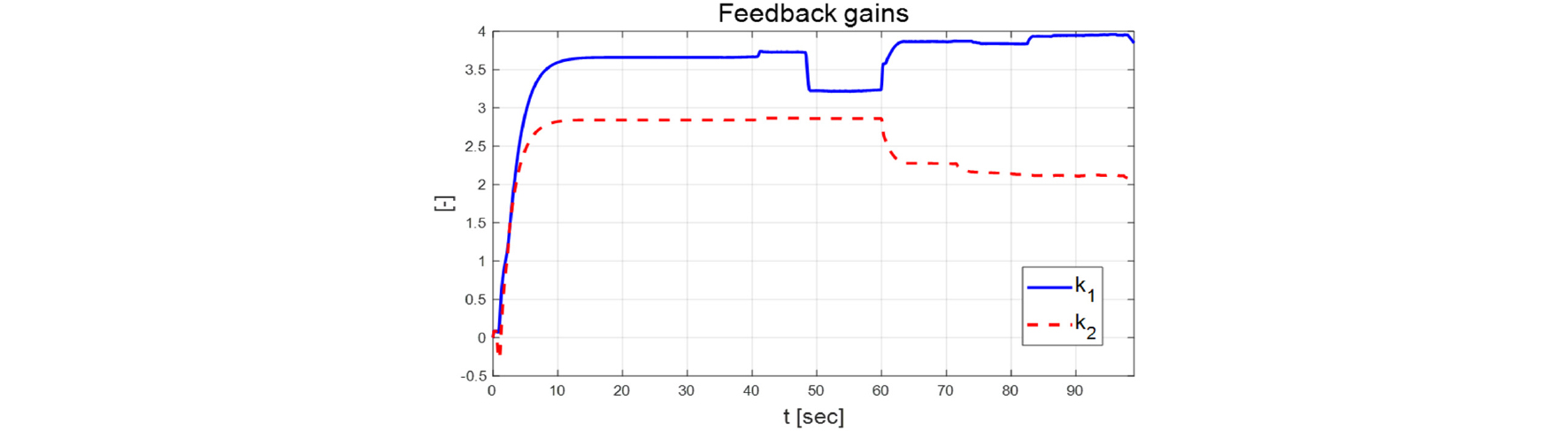
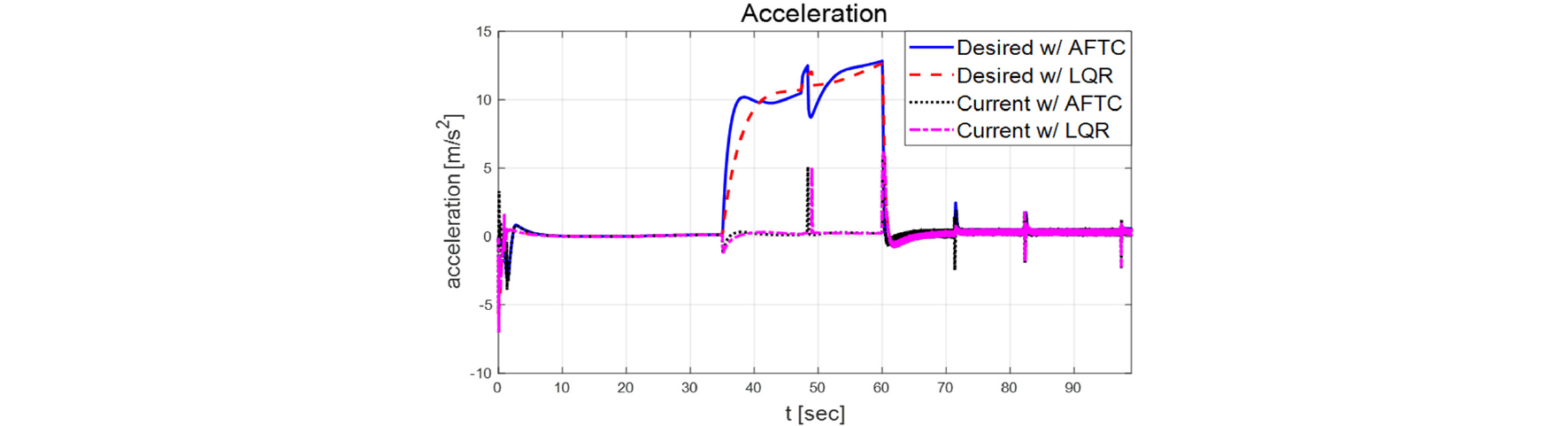
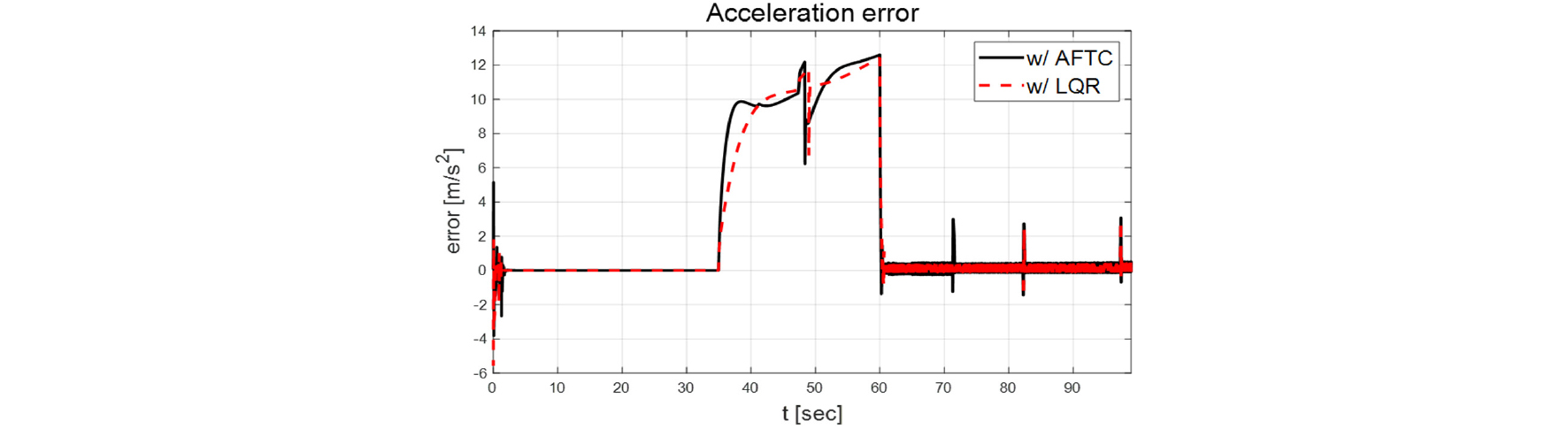
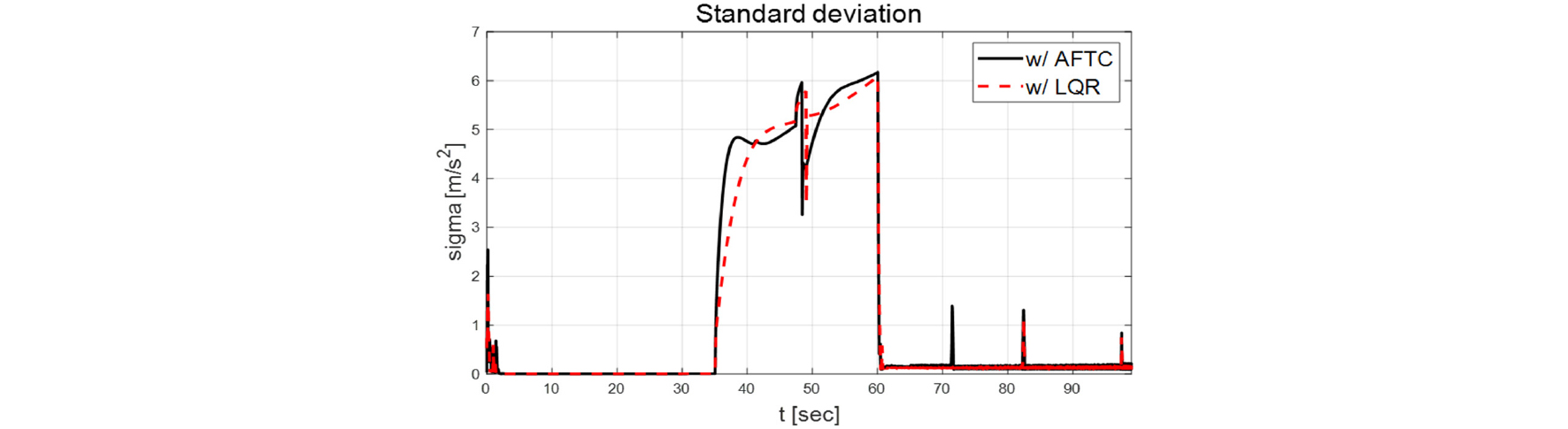
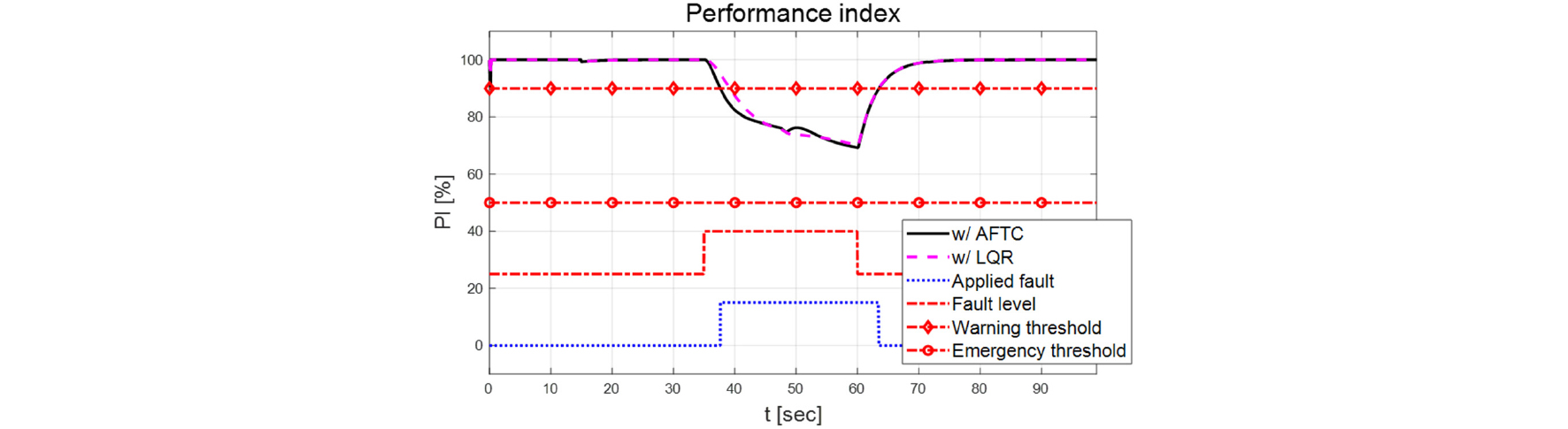
Fig. 34~Fig. 36은 요구 속도와 요구 상대 거리를 AFTC 및 LQR을 이용하여 추종한 평가 결과이다. 고장이 적용된 경우 LQR은 요구 속도 및 요구 상대 거리를 각각 최대 약 10kph와 약 30m 차이로 추종하지 못하는 결과를 보였다. Fig. 37과 38은 이전 성능평가 Case들과 동일하게 순환 최소 자승으로부터 적응형 규칙을 위한 추정 계수와 적응형 이득을 추정한 결과이다. 적응형 이득은 Fig. 41에서 η가 갱신된 결과에 따라 조정되고 η는 Fig. 39와 40의 학습 가중치에 따라 갱신된다. Fig. 42는 제어를 수행하며 발생된 목적함수의 값을 보여준다. Fig. 44는 제어기로부터 도출된 요구 가속도와 현재 차량의 가속도로 Fig. 43에서 도출된 되먹임 이득에 따라 요구 가속도를 갱신한다. 요구 가속도와 현재 가속도 간의 오차를 계산하고 Fig. 45와 같은 결과를 보였다. 이를 기반으로 표준 편차를 계산하여 Fig. 46과 같은 결과를 도출하였다. 표준 편차로부터 도출된 성능 지수는 Fig. 47에서 확인할 수 있다. Case 3에서의 도출된 고장 탐지 결과는 AFTC는 36.30초 LQR은 38.21초에 탐지된 것을 확인할 수 있으며, 실제 탐지 시점과는 1.30초 및 3.21초 차이를 갖는다. 결과적으로 본 연구에서 제안된 인간 모사 학습 기반 적응형 구동기 허용 제어 및 고장 탐지 알고리즘은 고정된 파라미터를 갖는 LQR 대비 파라미터를 갱신하여 합리적 결과들을 확인하였다. 표준 편차 개념을 이용하여 AFTC와 LQR의 추종 및 탐지 성능의 분석 및 비교를 위해 요구 속도와 현재 속도 간의 오차를 기반으로 도출된 표준편차 값과 고장 탐지 시간을 Table 3, 4에 기술하였다.
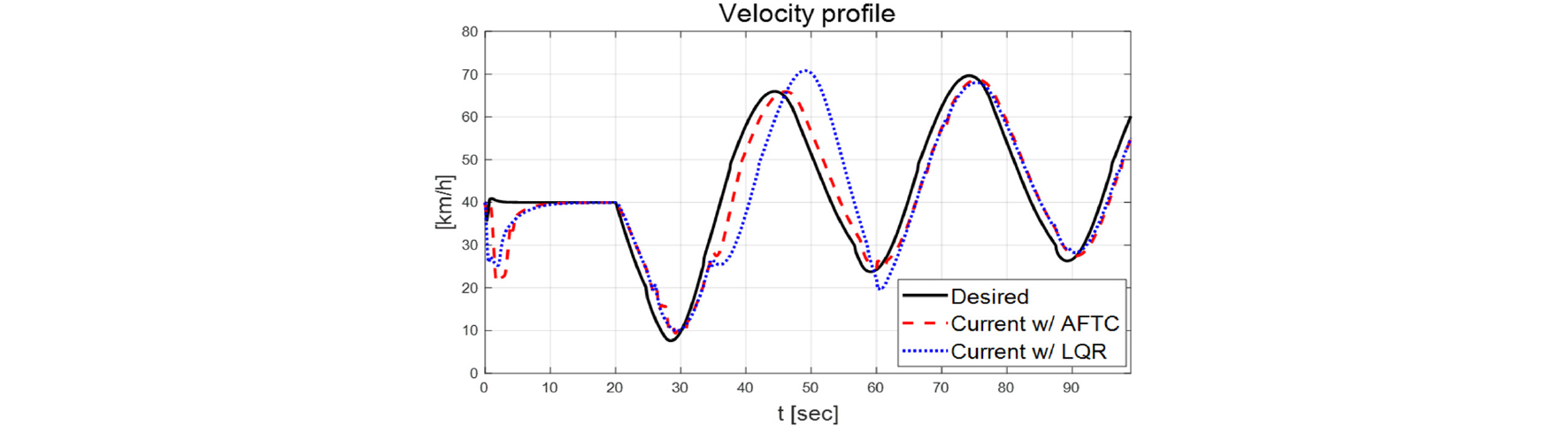
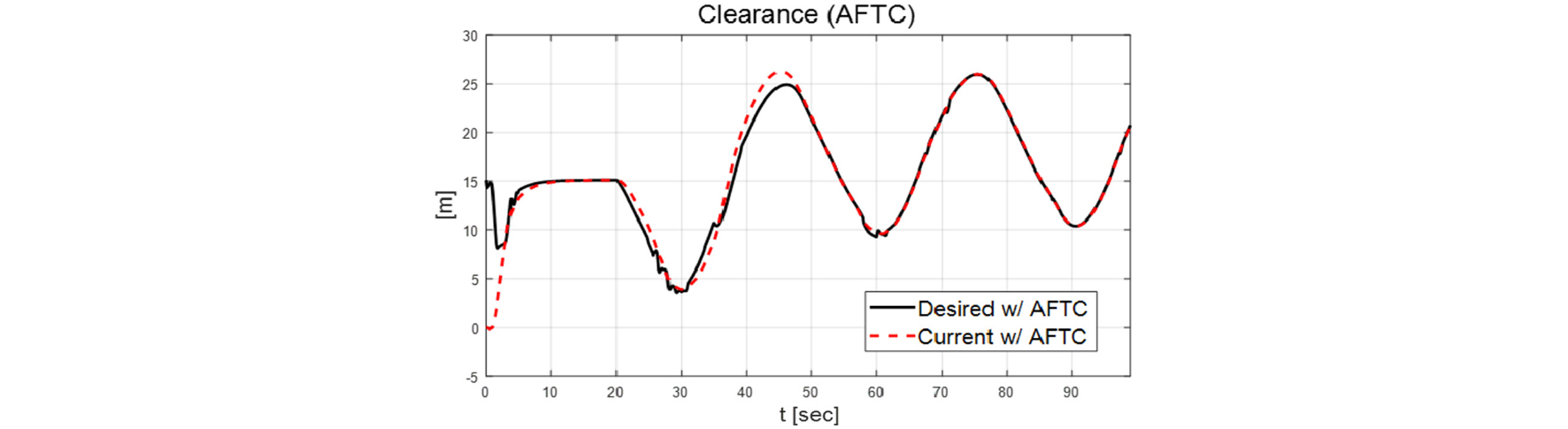
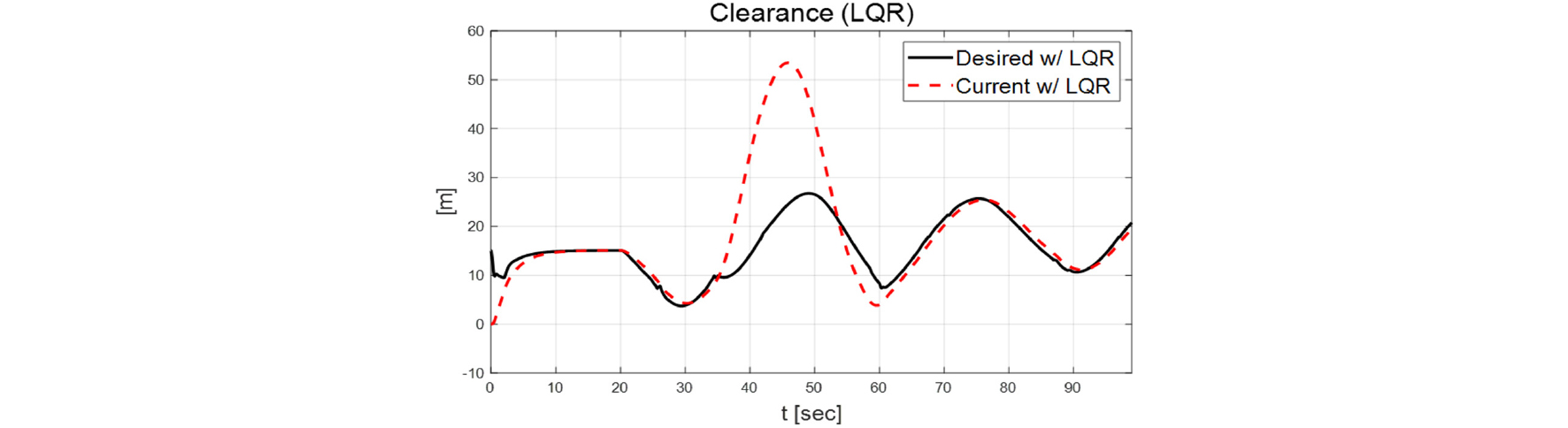
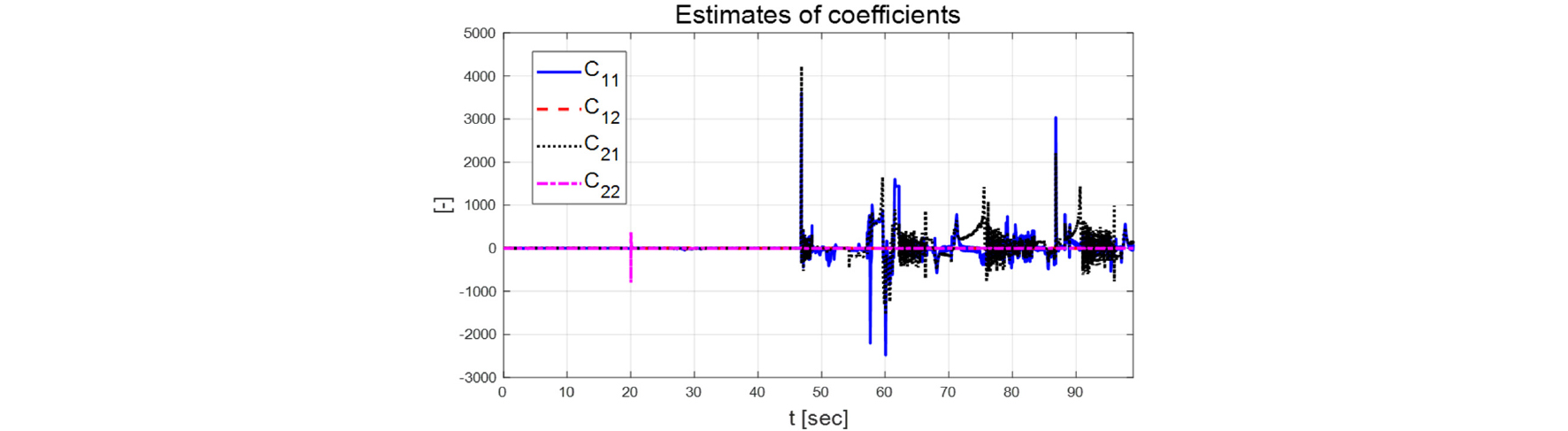
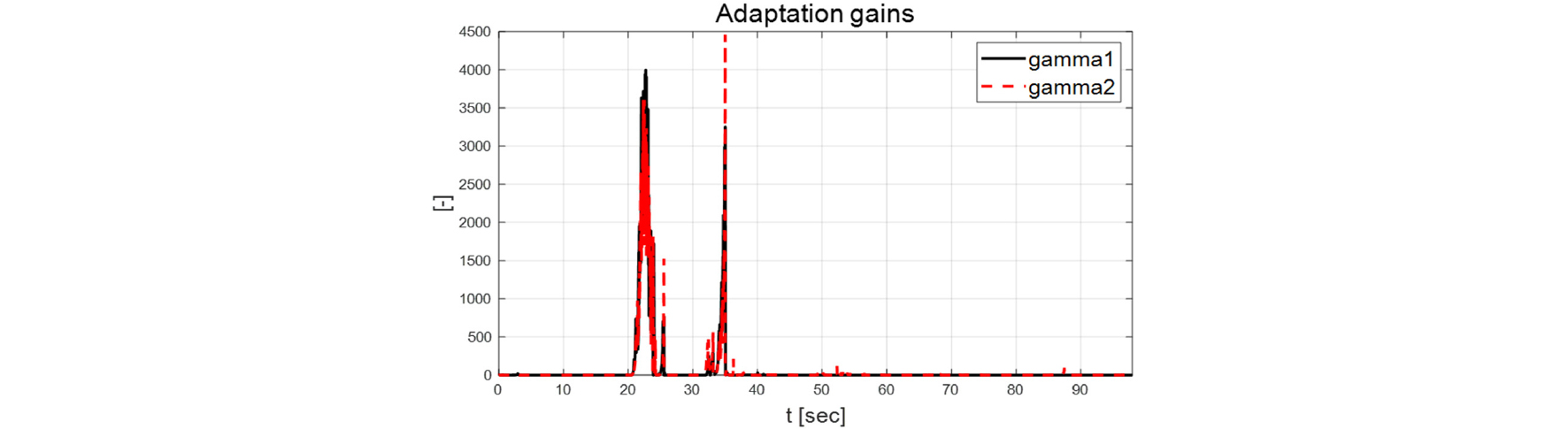
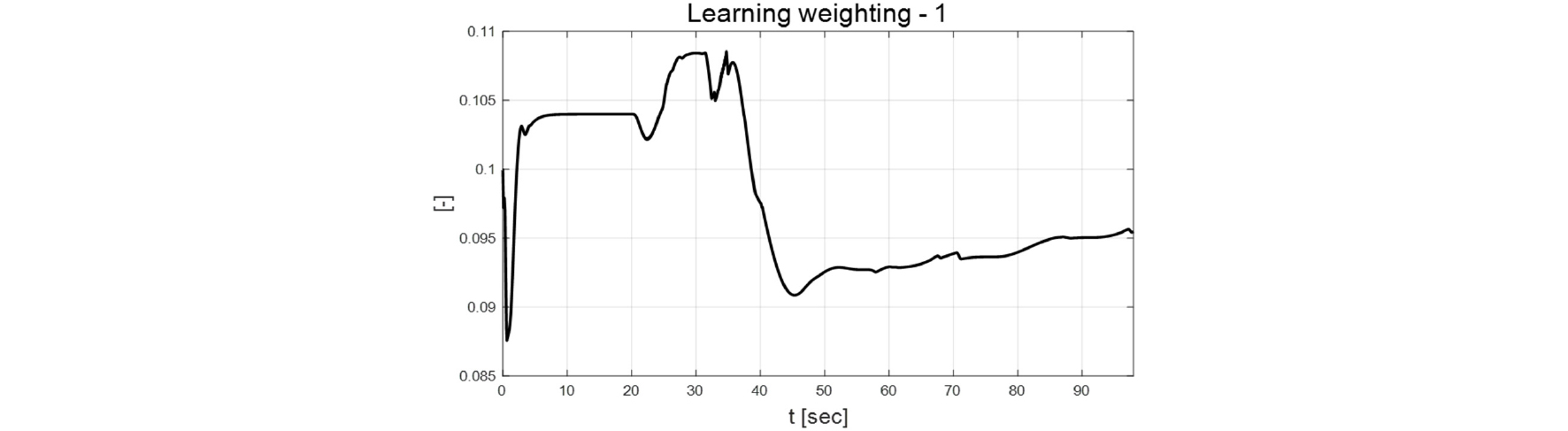
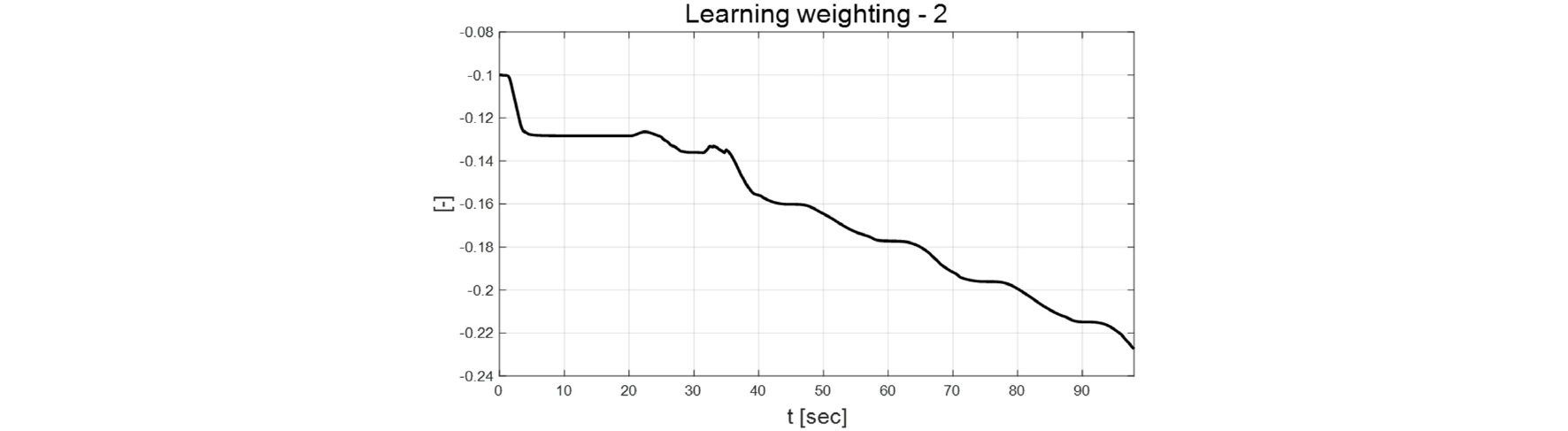
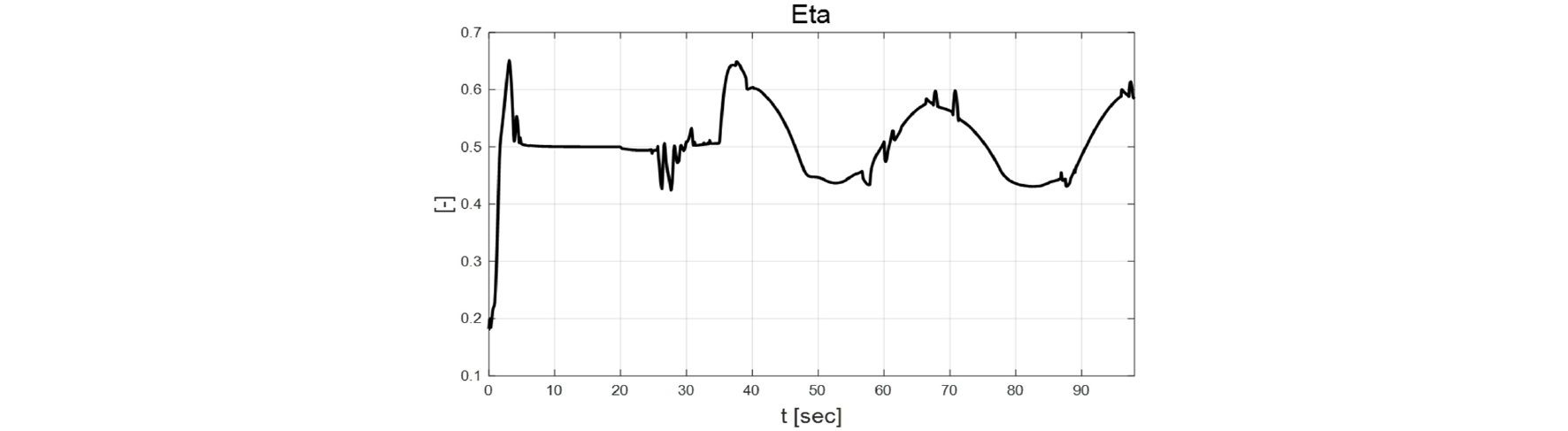
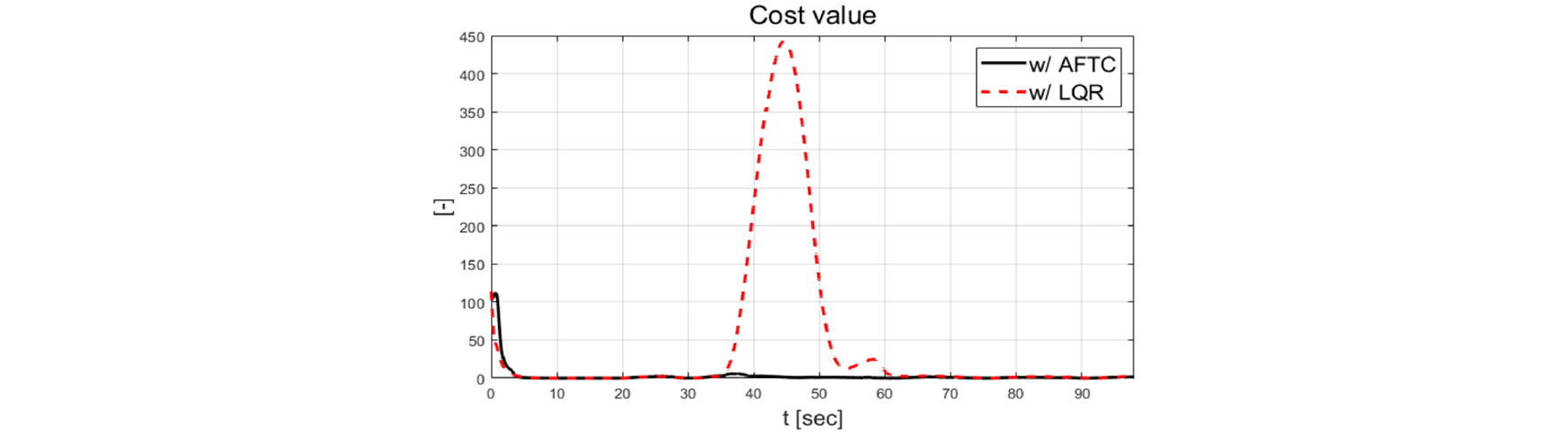
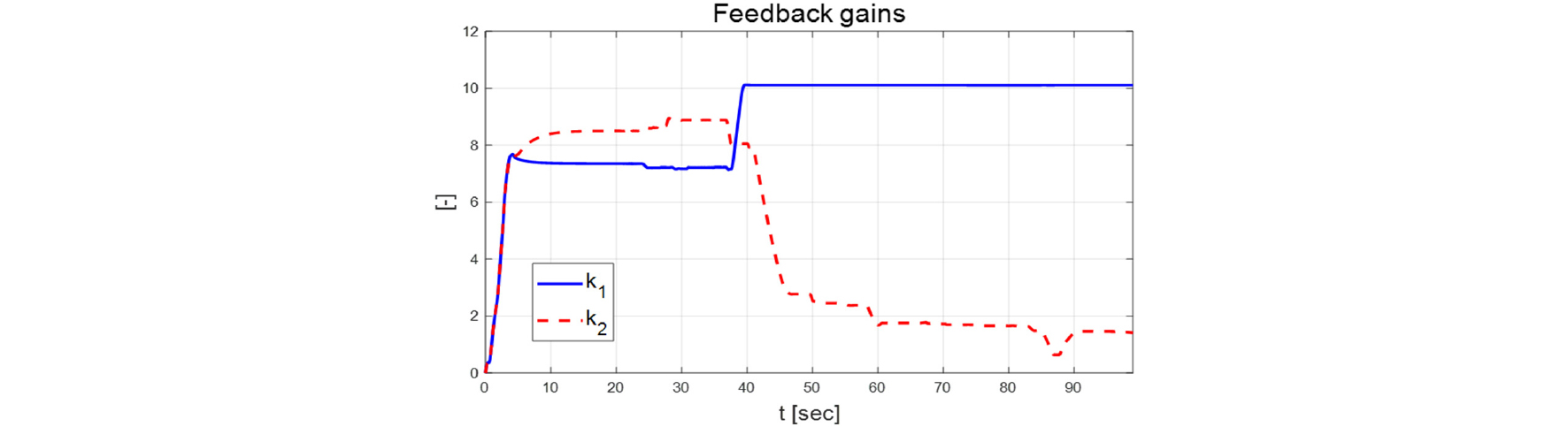
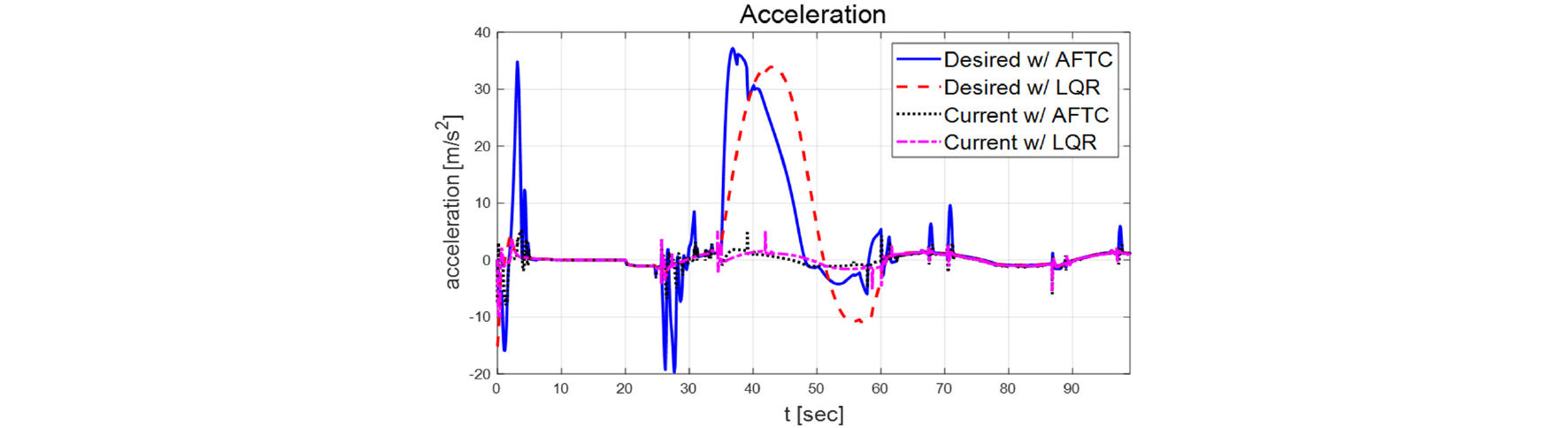
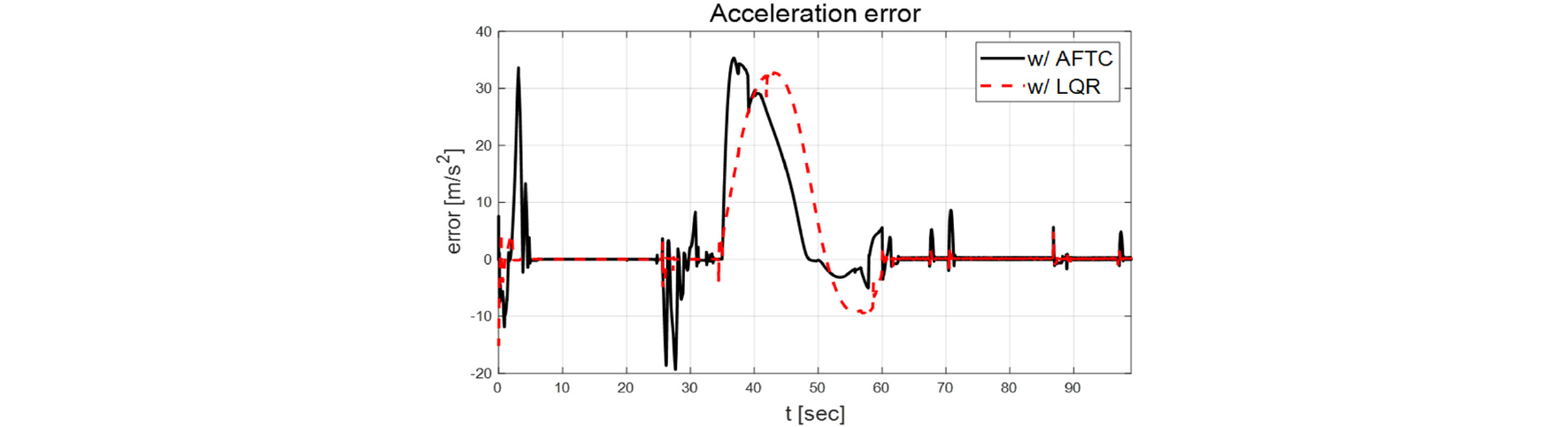
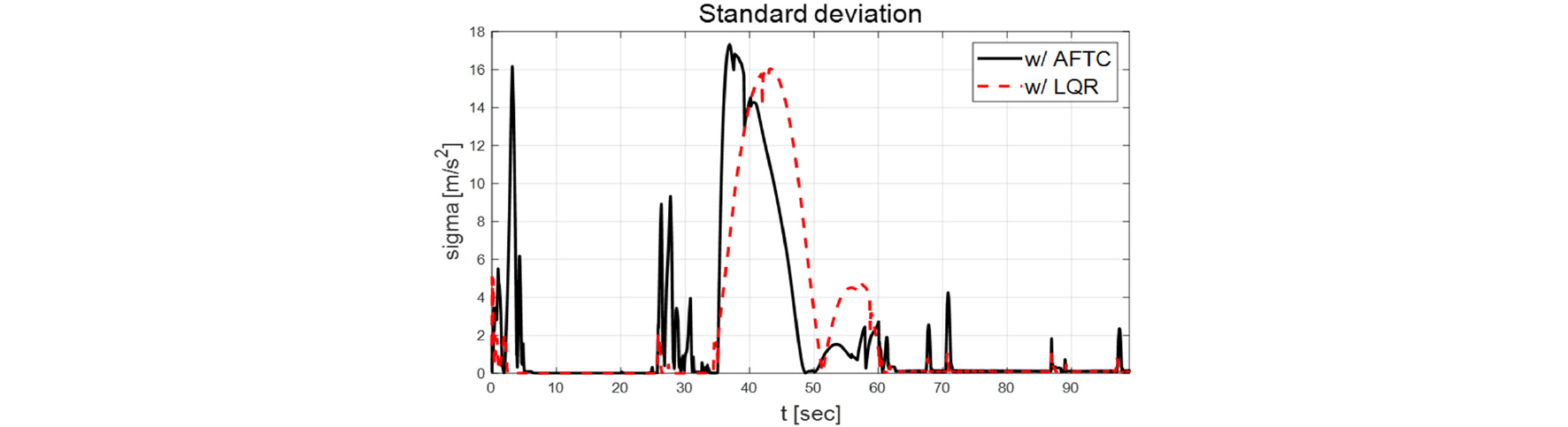
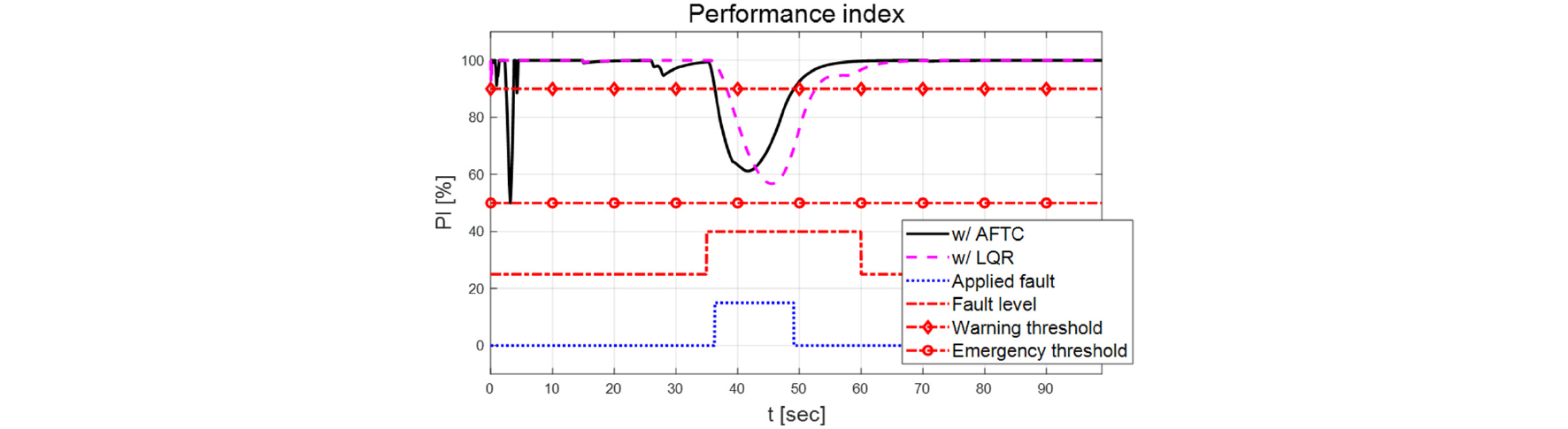
Table 3.
Standard deviation of velocity tracking error
| Velocity error [standard deviation] | ||
| Division | AFTC | LQR |
| Case1 | 0.50 [kph] | 2.93 [kph] |
| Case2 | 0.63 [kph] | 1.34 [kph] |
| Case3 | 5.57 [kph] | 14.92 [kph] |
Table 4.
Fault detection time
| Division | Fault injection time | Fault detection time | |
| AFTC | LQR | ||
| Case1 | 35[sec] | 36.56 [sec] | 38.32 [sec] |
| Case2 | 35[sec] | 37.63 [sec] | 39.20 [sec] |
| Case3 | 35[sec] | 36.30 [sec] | 38.21 [sec] |
Table 3, 4에서 보이듯이 제안된 인간 모사 학습 기반 적응형 고장 허용 제어 알고리즘은 LQR 대비 모델의 정보 없이도 고장 허용 제어를 수행하고 합리적인 요구 속도 및 상대 거리를 추종하기 위한 종방향 요구 가속도를 도출하였다. 도출된 가속도 오차는 현재 가속도 간의 오차를 계산하여 성능 지수를 도출하고 고장을 탐지하는 결과를 도출하였다. 제안된 알고리즘은 고려해야 할 파라미터들을 감소시켜 최소한의 파라미터를 갖도록 설계되었으며, 인간 학습을 모사한 학습 알고리즘을 개발하였다. 그러나 현재 알고리즘에 이용되는 인간 모사 학습 알고리즘은 과거의 저장된 데이터들을 재이용하고 합리적인 고장 허용 제어를 위해 η를 갱신의 간격을 조절하는 Δη 및 학습률 ε의 튜닝이 필요한 한계점이 있다. 다음 장에서는 결론과 한계점 분석 및 향후 제안된 알고리즘의 고도화 계획에 대해 기술한다.
4. 결 론
본 논문에서는 종방향 자율주행의 고장 안전을 위한 구동기 고장 탐지 및 인간 모사 학습 기반 적응형 고장 허용 제어 알고리즘을 개발하였다. 알고리즘은 고장 허용 제어를 위한 요구 가속도를 도출하기 위해 되먹임 제어기를 설계하였다. 그리고 요구 가속도 갱신을 위해 적응형 규칙을 순환 최소 자승과 기울기 하강법을 이용하여 설계하였다. 제어를 위해 고려되는 파라미터를 최소화하여 이를 갱신하기 위한 인간 모사 학습 알고리즘을 개발하고 적용하였다. 인간 모사 학습 알고리즘은 인간의 학습 방법을 모사하여 실시간으로 과거의 데이터들을 재이용하여 현재의 제어를 수행하도록 설계되었다. 제안하는 인간 모사 학습 알고리즘은 비용함수의 변화율 부호에 따라 제어 파라미터를 두 가지의 방법으로 출력한다. 비용함수의 변화율 부호가 양수인 경우 기울기 하강법을 기반으로 학습을 위한 가중치를 갱신하고 이를 기반으로 제어 파라미터를 계산하고 이와 달리 비용함수의 변화율 부호가 음수인 경우에는 저장된 데이터를 이용하여 제어를 수행하도록 설계되었다. 그리고 고장 탐지는 가속도 오차를 이용하여 계산된 표준 편차를 도출하였다. 표준 편차는 과거의 저장된 데이터의 영향도를 줄이기 위해 Window 내의 가속도 오차를 이용하고 가속도 오차에 가중치가 적용되어 계산되었다. 표준 편차를 기반으로 도출된 성능 지수는 고장을 탐지하기 위해 이용되었다. 계산된 성능 지수 값을 기반으로 고장의 단계를 정상, 경고, 비상 단계로 구분하는 판단 알고리즘을 제안하였다. 제안된 AFTC는 LQR과 비교 평가되었으며 평가 결과로부터 AFTC는 LQR 대비 요구 속도 및 상대 거리를 합리적으로 추종한 결과와 고장을 탐지할 수 있음을 확인하였다. 인간 모사 학습을 이용하여 과거의 목적함수의 변화율이 음수인 경우의 제어 파라미터들을 기억하여 제어를 수행하였지만 합리적은 고장 허용 제어를 수행하기 위해 학습 파라미터 갱신이 필요하였다. 그러므로 현재 과거의 데이터를 이용한 제어가 아닌 기울기 하강법을 이용한 알고리즘 고도화를 계획하고 있다. 향후 제안된 알고리즘은 자율주행 자동차의 고장 안전을 위한 시스템에 이용될 것으로 기대한다.
