

1. 서 론
2. 자율주행자동차 기준 동향
2.1. 자율주행자동차 해외 입법동향
2.2. 자율주행자동차 국내 입법동향
2.3. 자율주행자동차 제작 안전 가이드라인
3. 자율주행자동차 검사방법(Lv.3이하)
3.1. ADAS검사 방법 및 기술
3.2. OTA 검사 기술
3.3. KADIS를 이용한 검사 방법
4. 자동차 관제기술
4.1. 자율주행 정보기록 장치
4.2. BUS BARO
4.3. 전기자동차 관제시스템
5. 자율주행자동차 Lv.4 검사 방향성
5.1. 자율주행자동차 기준 강화
5.2. 자율주행자동차 관제기술 활용 검사
6. 결 론
1. 서 론
자동차 제작 및 정보통신 기술의 발전과 더불어 자율주행자동차의 보급이 점차 확대 되고 있다. 또한, 국내외 적으로 자율주행 자동차 Lv.4의 안전 기준 및 시범 차량 개발에도 서두르고 있는 실정이다. 정부에서는 ‘19년 정부합동 자율주행기술 개발로드맵을 발표하면서 Lv.3 이상의 자율주행자동차가 ‘25년에는 신차 판매시장의 11.5%, ‘30년에는 54.2%를 차지할 전망이라 밝혔다.(1) 이에 따라 국내에서는 미래 자동차에 대한 검사 기술을 개발하기 위해 다양한 노력들을 하고 있으나, 개발 방향등에 대해서 많은 고민을 하고 있다.
또한, 각국의 연구기관들이 자율주행 Lv.4 차량에 대해서도 컨셉 차량을 진행하고 있으며, Fig. 1과 같이 레이더, 라이더, 카메라 등 자동차 인지 관련 센서가 약 12개 정도 장착이 되어 있으며, 차량 후면에는 자율주행에 사용되는 센서에 대한 데이터 관리를 위해 데이터 플랫폼 형식으로 이루어져 있다.(2)

이에 따라 자율주행자동차 레벨이 고도화 될수록 움직이는 작은 플랫폼이라고 할 수 있으며, 기존의 검사를 통해서는 자율주행 자동차에 대한 검사를 할 수 없을 수 있으며, 국내 서울시 심야 자율주행 버스를 예로 들면, 현재는 운전자 등이 있긴 하나, 실제로 운전의 주체가 되지 못하고 현재 자율주행 도입을 위해 운전석에 앉아서 버스를 관리하는 관리자 역할을 하게 된다.(3) 이로 인해 앞으로 자율주행 시대가 오면 운전자의 개념이 사라지기 때문에 검사를 위해 검사소에 방문을 하는 것 또한 새로운 패러다임이 적용되어야 할 것이다.
본 연구는 이러한 고도화된 기술이 적용이 된 자율주행자동차를 검사기술을 개발하기 위해 기존 연구된 검사 기술 및 자율주행자동차 관련 기준 등을 분석하고, 검사 방향성을 제시하고자 한다.
2. 자율주행자동차 기준 동향
2.1. 자율주행자동차 해외 입법동향
자율주행자동차 시대를 대비하기 위한 세계 각국의 정책과 법제도의 접근방식은 두 가지로 나눌 수 있다. 첫째는 영국과 독일, 일본 등과 같이 현행 법체계 내에서 자율주행자동차의 시험 또는 상용화 가능성을 검토하는 방식과, 적극적인 입법 활동을 통해 자율주행차를 진행 또는 규제하려는 태도를 보이는 미국의 사례이다.
미국을 제외한 대다수 국가는 종전 법제도의 틀의 적용 가능성에 대한 해석적 접근을 우선시 하고 있고, 시험주행에 한정하지 않고 상용주행도 고려하고 있다. 또한 자율주행기능이라는 신기술 도입·적용에 따른 우려의 불식과 위험성 예방을 위한 대응으로서 현시점에 적용 가능한 정부 정책을 제시하거나 지침 또는 가이드라인 등의 연성 규범을 마련하고 국제법의 영역에서 공동의 해법을 찾기 위한 논의를 진행 중에 있다.
미국의 경우 독자적인 입법을 통해서 무인자동차를 비롯하여 자율주행이라는 혁신적 기술을 당장 법제도에 수용하려는 태도를 보이고 있다.(4)
2.2. 자율주행자동차 국내 입법동향
2015년 「자동차관리법」개정을 통해서 자율주행자동차의 개념을 법제화 하고, 시험·연구 목적의 자율주행차 임시운행에 관한 구체적 규정을 마련했다. 이를 통해 연구개발의 최소한의 제도적 장치는 마련되었다고 볼 수 있다.
국내 자율주행자동차 Lv.4 자동차안전관리는 「자율주행자동차법」과 「자동차관리법」으로 이원화 되어 있다. Lv.4 자율주행자동차 상용화에 대비해 입법체계의 통일성과 법률 집행의 일관성을 확보하기 위한 방안으로 안전관리 관련 법률체계의 개편방안에 대한 연구도 진행되고 있다.(5)
2.3. 자율주행자동차 제작 안전 가이드라인
자율주행자동차 제작과 관련하여 안전가이드 라인을 국내에서는 Lv.3 안전가이드라인을 제시 하였으며, 본 연구에서는 다양한 안전가이드라인 중 자율주행정보 기록장치의 성능기준에 대해서 검토하고자 한다.
국제적으로 ECE/TRANS/WP.29/2020/81로부터 데이터의 기록 주기, 범위 및 항목 등에 대한 기술적 사항으로 공인된 국내외의 기준 및 표준을 참조하여 정하고 지속적으로 업데이트 하고 있으며, 국내에서는 자동차 및 자동차부품의 성능과 기준에 관한규칙[별표 27]에 따라 자율주행 정보에 대해 기록하는 장치에 대해 성능기준을 마련하고 있다.
3. 자율주행자동차 검사방법(Lv.3이하)
3.1. ADAS검사 방법 및 기술
국내에서는 자율주행 Lv.2 이상 ADAS 검사를 위해 VILS 시스템을 개발하였으며, 가상의 주행환경을 모사하여 ADAS 기능들이 정상적으로 동작하는지 검사하는 방식으로 아래와 같이 기술개발이 되었다.

3.1.1. H/W구성
자동차 OEM에서는 자동차의 조립이 완료된 이후 최종검사 공정인 EOL(End of Line)에서 자동차를 롤러위에서 주행시키며 완성된 자동차의 롤 및 브레이크의 성능을 검사하기 위해 DÜRR 社의 X-Road Curve를 사용하고 있으나, 공단에서는 이를 ADAS 검사를 위해 해당 장비를 도입하였으며, 별도 차량 고정 작업 없이 최대 시속 170 km/h 및 조향주행을 모사할 수 있도록 개발 하드웨어 구성을 마련하였다.
3.1.2. S/W구성
자동차 ADAS 인지 센서로 레이더 센서 및 카메라 센서를 검사할 수 있는 장비를 마련하였다.
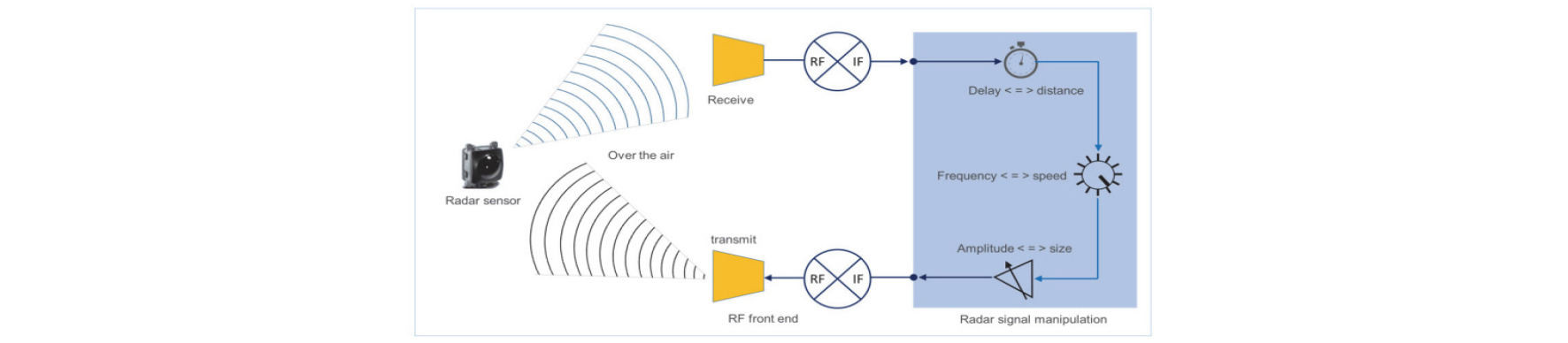
우선 차량의 장착된 레이더 센서를 검사하기 위해 공간, 안전성 측면을 고려한 레이더시뮬레이터를 통해 가상의 레이더와의 연계기술을 통해 차량이 타겟이 없더라도 가상 레이더를 통해 인지할 수 있는 시스템을 Fig. 3과 같이 마련하였다.
또한, 카메라 센서기술을 대응하기 위해 영상 시뮬레이터를 도입하여 도로의 차선, 상대 차량 등 도로 환경을 시뮬레이션 할 수 있는 시스템을 마련하였다.
마지막으로 테스트 차량의 ADAS 기능을 활성화 하기 위해 리얼타임 시뮬레이터를 통해서 레이더 및 영상 시뮬레이터를 제어 할 수 있는 시스템을 마련하고, 테스트 차량의 차속 및 조향각 신호를 실시간으로 받아 레이더 및 영상 시뮬레이터에 반영할 수 있는 시스템을 마련하였다.
3.1.3. ADAS검사 통합 시스템
Fig. 4와 같이 H/W와 S/W의 구성을 통합한 시스템을 마련하여, 자동차가 실 주행을 하지 않더라도 주행모사 상태에서 현재까지 AEB, FCW, ACC, LKAS, LDWS, TCS, ABS 등 7가지 이상의 ADAS 검사를 할 수 있는 시스템을 개발하였다.(6)

향후 Lv.3 자율주행자동차 검사까지 활용 할 수 있도록 시스템 고도화 등을 진행하고 있으며, Dynamic Headlamp도 포함한 검사 기술을 개발 하고 있다.
3.2. OTA 검사 기술
테슬라 등 일부 자동차의 경우 자동차 산업이 SDV(Software Defined Vehicle)로 전환되고 있으며 더 이상 자동차의 H/W 기술 보다 S/W의 기술이 중요시 되고 있다. 대부분의 제작사 들은 자동차의 기술 업데이트를 위해 OTA(Over The Air)기술을 활용하여 무선 S/W 업데이트를 통해 기술개발을 하고 있으나, 이를 관리 할 방안이 없었다.
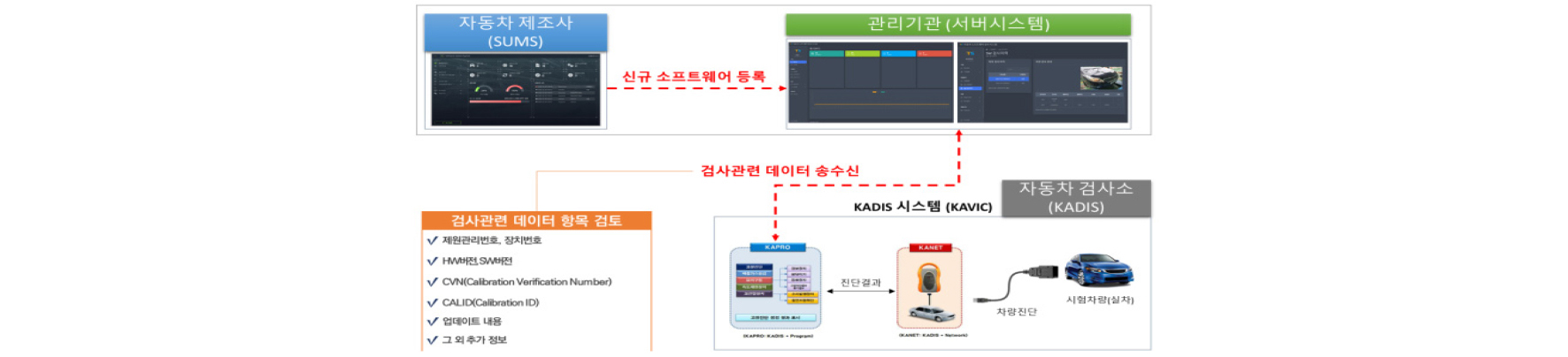
하지만, 국내에서 ‘23년 11월 테슬라 진단을 포함한 S/W 업데이트 관리기술을 개발하고 이를 국가차량관리시스템(VIMS)에 반영하여 새로운 유형에 대한 안전관리 체계를 Fig. 5와 같이 구축 하였다. 이는 미래 자율주행자동차에서 필수적으로 포함이 될 기술인 OTA 검사 테스트 베드이며, 현재 시범운영을 하고 있다.
3.3. KADIS를 이용한 검사 방법
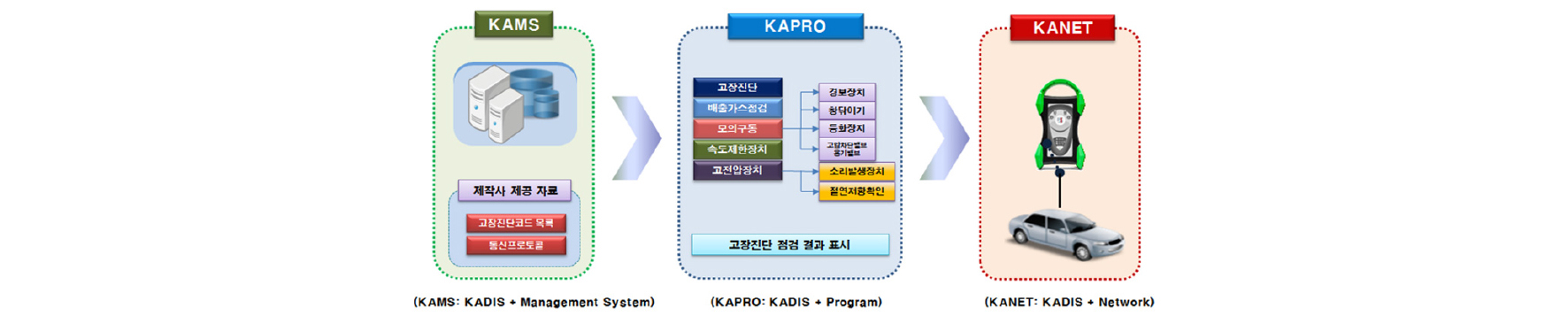
한국교통안전공단에서는 KADIS(Korea Automobile Diagnosis System)을 개발하였고, 국내 운행 전차량에 대한 검사가 가능한 서버형 범용 진단기를 Fig. 6과 같이 개발하였다. KADIS는 KAMS(서버), KAPRO(프로그램), KANET(진단기)으로 구성이 되어 있으며, OBD(On-Board Diagnostics)를 통해 차량을 검사 할 수 있다. 최근 보급되는 자동차에는 운전자의 안전운전을 지원하는 ADAS에 대한 검사를 위해 기술개발이 되어 있으며, ADAS의 기본이 되고 있는 각종 센서(카메라, 레이다 등)에 대해 정상적인 장착상태 유무를 판단하는 기술을 마련하여, 검사를 진행 하고 있다.(7)
4. 자동차 관제기술
4.1. 자율주행 정보기록 장치
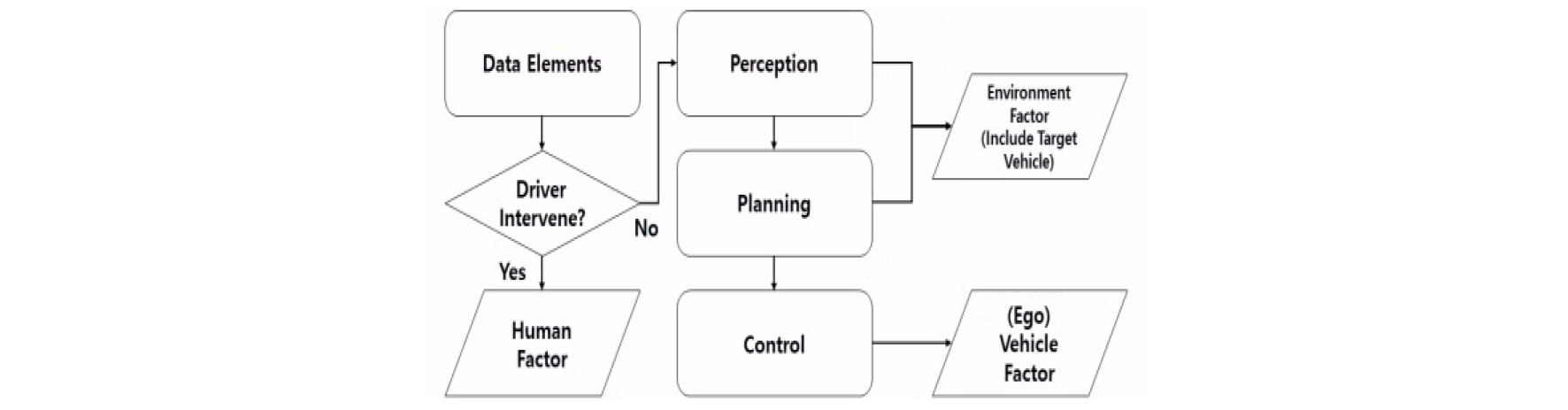
자율주행자동차 안전 가이드라인을 통해 자동차의 자율주행 정보기록 장치를 마련하도록 하고 있으며, 이에 따른 기록항목으로는 자동차 사고 기여요인 3가지와 더불어 자율주행 3요소인 ‘인지’, ‘판단’, ‘제어’를 복합적으로 고려하여 Fig. 7과 같이 기록항목을 도출 할 수 있도록 연구 되고 있다.(8) 다만 현재 시점의 자율주행 정보 기록장치의 경우 자율주행자동차의 교통사고 발생 시 사고조사의 목적이 크게 설정되어 있다.
4.2. BUS BARO
국내에서는 창원특례시를 기반으로 시내버스 안전모니터링을 위해 약 700대 가량의 사업용 시내버스에 자동차 실시간 데이터를 확보하기 위해 Fig. 8과 같이 시스템을 마련하였으며, 해당 기술의 경우 수소, 전기, CNG, 디젤 연료 버스에 대해서 100~400개 데이터를 초당 받고 관리 하고 있다.(9)
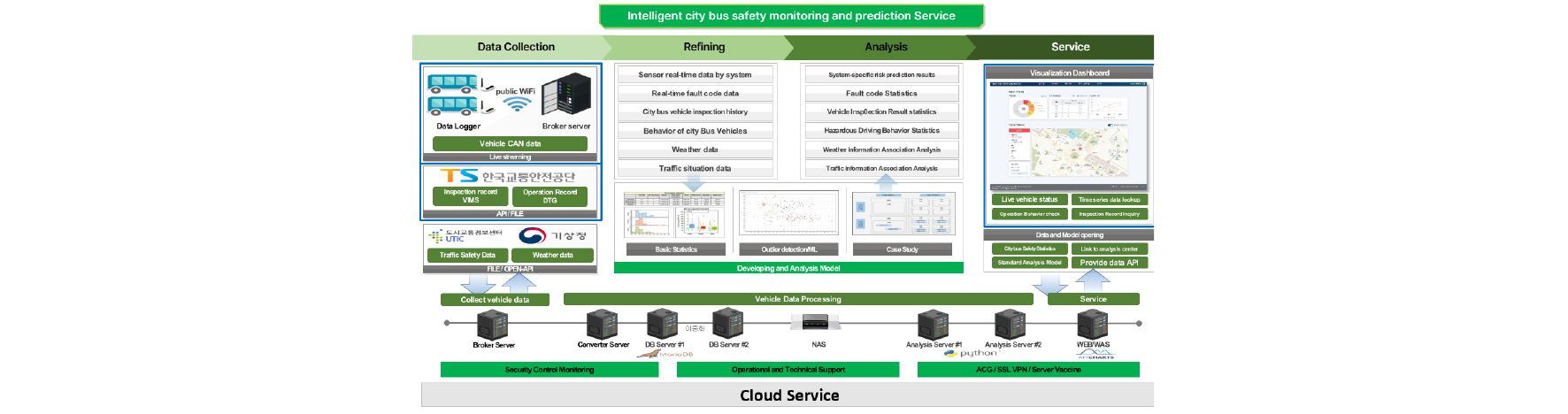
이러한 시스템은 현재 부산-울산-경남의 시외버스 및 광주광역시 시내버스에 약 1,300여대에 데이터 로거가 장착 확산되어 있다.
이러한 데이터 수집을 통해서 차량의 연비(전비), 운행행태, 공회전, 과속, 브레이크 작동여부 등 모니터링 할 수 있는 시스템을 마련하였으며, Autoencoder 기법을 활용하여 버스 센서에 대한 예지정비 모델을 구성하였다.
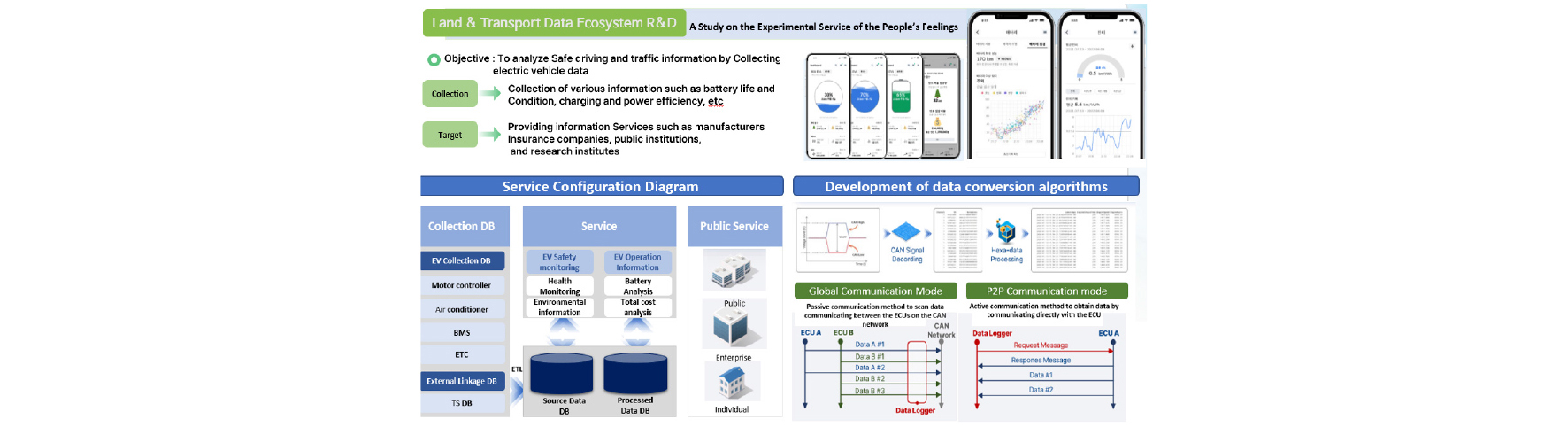
4.3. 전기자동차 관제시스템
또한 사업용 전기화물자동차의 데이터 수집을 통해서 편리하고 간편한 안전운전 및 통행 정보 분석 시스템을 마련하여 준비하고 있다. 배터리 수명(SOH), 충전(SOC) 등 실시간 각 셀 당 전압, 온도데이터 등 Table 1과 같이 전기자동차의 데이터를 수집하고 있으며, 이를 통해 화재 예방 등 다양한 방향으로 기술이 사용되고 있다.(10)
Table 1.
Electric vehicle data collection items
해당 시스템은 GPS 및 전기자동차의 실 데이터를 이용하여 서비스를 Fig. 9와 같이 마련하고 있으며, 전기자동차의 관제의 역할을 하는 시스템이다. 데이터의 추출 방식은 차량 내 OBD를 통해서 데이터를 추출하고 있으나, 일부 OBD가 없는 자동차에 대해서 추가적으로 데이터 확보방안에 대해 연구 진행을 하고 있다.
5. 자율주행자동차 Lv.4 검사 방향성
자율주행자동차 Lv.4 검사의 경우 현재 자동차 검사와는 패러다임이 변화해야 할 것이다. 기존의 운전자가 검사소에 방문하여 검사를 수검하는 방향을 완전히 바꾼 관제 등을 통해서 자율주행자동차의 실시간 관제를 해야 할 것이다.
하지만 현재 자율주행자동차와 관련하여 임시주행 허가를 받은 차량은 일부 구간에서만 주행을 할 수 있기 때문에 검사소 까지 갈수가 없어 제도적 문제도 해결해야하고, H/W 부품의 문제 등은 검사소 출장 검사를 통해서 검사원이 직접 방문을 통해 검사해야 할 것으로 판단된다.
또한, 사업용 차량의 경우 실시간 관제가 적용할 수 있으나, 비사업용 차량은 차주의 동의가 없는 경우 관제가 어렵기 때문에 티어 다운등의 방식을 통해 검사도래 시 검사소로 갈 수 있도록 하는 방법을 고민해봐야 할 것이다.
5.1. 자율주행자동차 기준 강화
현재 국토부에서는 ‘19년 세계 최초 Lv.3 자율주행자동차에 대한 안전기준을 마련했으며, ‘20년 Lv.4 자율주행자동차 제작안전 가이드라인을 마련하였다.(11)
그 중 주행안전 항목의 ⑤번 항목의 데이터 기록장치에 대해서 강화를 해야 할것으로 보인다.
현재 데이터 기록장치와 관련해서는 자율주행시스템의 작동여부, 해제 원인, 제어권 전환요구, 비상운행의 시작과 종료, 위험최소화운행 시작, 고장상황등을 기록하고 있고, 각 상황별 발생 사유, 발생 날짜 및 시각을 초단위로 저장하고, 데이터는 최소 6개월이상 보존하도록 되어 있다. 또한 데이터의 기록 주기, 범위 및 항목 등에 대한 기술적 사항은 공인된 국내·외의 기준·표준(자동차 안전기준, UNECE/WP29 등)을 참조하여 정하고 지속적으로 업데이트 하고 있으나, 자동차의 관리 측면에서의 데이터는 아래와 같이 전혀 받고 있지 않다.
「제17조(운행기록장치 등)」 자율주행자동차에는 「교통안전법」제55조제1항에 따른 운행기록 장치를 장착하여야 하고, 「도로법」제2조에 따른 도로에서 운행할 때에는 다음 각 호에 해당하는 정보를 저장하여야한다. 다만, 운행기록장치를 통해 저장할 수 없는 정보의 경우에는 별도의 기록장치를 장착하여 해당 정보를 저장하여야 한다.
1. 자율주행자동차의 속도
2. 분당 엔진회전수 또는 구동모터 회전수
3. A형 자율주행자동차의 경우 제동·가속제어 조종장치의 신호 및 작동 주체
4. B형 자율주행자동차 및 C형 자율주행자동차의 경우 제어신호 정보 및 작동주체, 제10조에서 정한 조종장치 작동상태
5. GPS 위치정보
6. 종방향 및 횡방향 가속도
7. 시간대별 자율주행시스템의 작동모드
8. 조향핸들의 각도 또는 조향바퀴의 각도
9. 자동변속장치의 변속단 위치
이에 따라, 자율주행 자동차 성능 인증 안전 요건 확인 및 안전운행 규정 중 제17조(운행기록장치 등)에 대해 추가적으로 본 연구에서는 고장진단코드(DTC), 진단데이터(센서데이터), 전기자동차의 경우 배터리 셀 온도, 셀 전압 등 추가하여 강화할 필요가 있다.
5.2. 자율주행자동차 관제기술 활용 검사
한국교통안전공단에서는 운행자동차 안전관리를 위해 BUS-BARO 시스템, 전기자동차 관제시스템, DTG, 위험물운송차량 관제시스템 등 다양한 부분에 있어서 관제를 통해 관리를 하고 있다.
앞으로의 자동차 검사는 관제기술이 주를 이루어 실시간으로 국민의 자동차를 관리를 하는 플랫폼을 개발해야 하며, Lv.4 이상의 자동차의 경우 움직이는 플랫폼이기 때문에 이에 따른 각 플랫폼을 검사하는 시스템을 마련해야 할 것으로 판단된다. 또한, 출장검사 등을 통해 이상발견 시 기존의 검사 주기가 아닌, 수시 검사를 통해 실시간으로 자율주행자동차에 대한 관리를 전사적으로 해야 할 것으로 판단되며, 검사 영역은 일정주기가 아닌 실시간으로 더욱 확대가 되어야 하며, 자율주행자동차 운행안전성 확보를 목표 삼아야 할 것이다.
6. 결 론
본 연구는 자율주행자동차 Lv.4 이상 자동차에 대한 검사기술 방향성을 연구하기 위해 Lv.3 이하 자율주행자동차의 기준 및 그에 따른 현재 개발이 되어 지고 있는 검사 방법을 소개하고 기존의 자동차의 관제 기술을 하여 Lv.4 이상의 자율주행자동차에 대한 검사 방향성을 제시하였다.
본 연구의 결과를 요약하면 다음과 같다.
1) 자율주행자동차 Lv.4 이상 자동차에 대한 국제적인 기준 및 법안 마련을 위해 노력중이며, 국내에서는 자율주행자동차법과 자동차관리법에 대한 이원화 된 문제가 있어, 향후 체계적 안전관리를 위한 법률체계 개편 등 추가적인 연구가 필요하다.
2) 국내에서는 자율주행자동차 Lv.3 이하 자동차에 대해서는 ADAS 검사 통합 시스템과 OTA 검사기술, 자체 제작한 KADIS를 이용한 OBD 검사 3가지 방향성을 가지고 기술 개발을 하고 있다.
3) 자동차 관제기술개발을 위해 자율주행 정보 기록장치에 대한 개선 연구와 함께, 실제 대중교통 및 전기자동차에 대한 실시간 진단데이터를 확보하는 연구를 진행하고 있다.
4) 이에 따라 본 연구에서는 자율주행 자동차 성능 인증 안전 요건 확인 및 안전운행 규정 중 제17조(운행기록장치 등)에 대해 추가적으로 고장진단코드(DTC), 진단데이터(차량 센서데이터) 등을 추가하여 강화할 필요가 있다.
5) 자율주행 자동차 Lv.4 이상 자동차의 검사 방향성은 법제도 문제, 현재 검사 시스템 문제 등 다양한 부분에 있어 개선이 필요 하고 있으며, 본 연구에서는 관제 기술을 통해 검사 영역이 일정주기가 아닌 실시간으로 출장검사 및 관제검사를 통해 자동차 운행안전성을 확보해야 한다고 판단된다.
6) 또한, 사전에 제작기준 등을 반영한 자율주행자동차검사 기준개발 방향성은 CITA 등의 국제 표준화에 선도 할 수 있을 것으로 판단된다.
