

1. 서 론
2. 차량 모델 정합성 검증 방법
2.1. 시뮬레이션 모델 검증 표준
2.2. 정합성 검증 파라미터
2.3. 차량 모델 검증 시스템 구성
3. 차량 거동 검증
3.1. 차량 거동 검증 시나리오
3.2. 평가 결과
4. 주행 환경 검증
4.1. 주행 환경 검증 시나리오 선정
4.2. 주행 환경 검증 파라미터
5. 결 론
1. 서 론
자율주행 기술이 발전함에 따라 차량의 안전성 및 성능 검증의 중요성이 높아지고 있다. 특히 자율주행 차량의 기술적 신뢰성을 확보하기 위해서는 철저한 검증 절차가 필수적이다. 하지만 실제 차량을 이용한 검증 방법은 막대한 비용과 높은 안전사고 위험을 동반한다는 단점이 있다. 이에 따라 최근 실제 차량 테스트를 대체하거나 보완할 수 있는 시뮬레이션 기반의 가상 검증 기술이 주목받고 있다. 시뮬레이션 환경을 활용하면 다양한 주행 시나리오를 저렴한 비용과 낮은 위험성으로 반복 수행할 수 있으며, 이는 자율주행 차량의 기술의 신뢰성을 향상시키는데 매우 효과적이다. 그러나 시뮬레이션 모델이 실제 차량의 거동을 모사하지 못하면, 신뢰할 수 있는 검증 결과를 얻는 것이 어렵다는 한계가 있다.
이러한 한계점을 극복하기 위해 최근 실제 환경과 시뮬레이션 환경의 정합성을 향상시키기 위한 연구들이 활발히 진행되고 있다. 특히, 시뮬레이션 환경의 신뢰성과 현실성을 향상시키기 위해 정량적 검증, 실시간 모델 정합성, 차량 모델링 등 다양한 관점에서 접근하고 있다.
기존의 시뮬레이션을 통한 검증 방식은 제한된 조건에서 이루어지며, 적용 범위 또한 제한적이라는 한계가 있다.(1) 이를 보완하기 위해, 다양한 주행 조건과 시나리오에 대해 모델 신뢰도를 평가할 수 있는 통계 기반의 검증 프레임 워크가 제안되었다.(2) 이러한 접근은 시뮬레이션 결과와 실제 차량 데이터를 비교하여 오차와 예측 신뢰도를 정량적으로 분석함으로써, 기존보다 훨씬 정밀한 검증이 가능하다는 장점을 가진다.(3)
한편, 실시간 시뮬레이션 환경에서도 높은 물리적 정합성을 유지할 수 있도록, 계산 효율성과 정확성을 동시에 고려한 다물체 기반 차량 동역학 모델이 개발되었으며, 다양한 주행 실험을 통해 그 유효성을 입증하였다.(4) 운전자가 직접 개입하는 시뮬레이터 환경에서는 모션 피드백, 차량 거동 등 다양한 요소의 현실성이 시뮬레이션의 신뢰성과 직결되며, 이에 대한 정량적 검증 기준의 필요성이 제기되고 있다.(5) 또한, 시뮬레이션 핵심 구성 요소인 타이어-노면 상호작용 모델의 경우, 물리 기반 모델을 통해 다양한 환경 조건에서의 타이어 거동을 보다 정밀하게 예측하고 있으며, 이는 차량 시뮬레이션의 현실성을 높이는데 크게 기여하고 있다.(6)
따라서 본 연구에서는 상기 연구들을 바탕으로 실제 차량의 데이터를 바탕으로 차량의 종방향 및 횡방향 동역학 거동에 대한 시뮬레이션 환경의 정합성을 검증하는 방법론을 제안한다. 이를 통해 시뮬레이션 환경에서의 차량 거동을 실제 차량과 최대한 유사하게 구현하고, 자율주행 차량의 검증 신뢰성과 효율성을 높이고자 한다.
2. 차량 모델 정합성 검증 방법
2.1. 시뮬레이션 모델 검증 표준
실제 차량과 시뮬레이션 차량 모델의 정합성을 검증을 위해서는 실험 시나리오와 절차가 필수적이다. 따라서 시뮬레이션 모델의 검증을 위하여 차량 모델 검증 관련 표준을 검토하였다.
시뮬레이션 차량 모델 검증의 신뢰성을 보장하기 위하여 종방향 검증과 횡방향 검증을 구분하여 검토하였다. 종방향의 경우 가속, 감속, 제동 등 종방향 거동에 직접적인 영향을 미칠 수 있는 관련 표준들을 검토하였으며, 횡방향의 경우 사인 조향, 원선회 등 횡방향 거동에 직접적인 영향을 미칠 수 있는 관련 표준들을 검토하였다.
2.1.1. 종방향 정합성
시뮬레이션 차량 모델의 종방향 정합성 검증을 위하여 ISO-14512: Straight-ahead braking on surfaces with split coefficient of friction 문서를 인용하였다. 해당 문서는 차량의 종방향 거동을 테스트하기 위하여 직진 상황에서 브레이킹 거동에 대한 테스트 절차와 조건을 명시하였다.
테스트 절차는 다음과 같다. 시속 80 kph 이상의 조건에서 정상 상태를 유지할 수 있도록 3초 이상 주행하며, 해당 상황에서 최대 브레이킹(Full Braking)을 수행한다. 이 때, 속도의 조절이 필요할 경우 10 kph 또는 20 kph 단위로 조절할 수 있다. 또한, 도로의 경사는 종방향 2.5%, 횡방향 1% 이하여야 하며 길이는 50 m 이상, 폭은 충분히 넓어야 한다. 또한, 도로의 마찰 계수는 0.5 이상이어야 한다.
2.1.2. 횡방향 정합성
횡방향 정합성 검증의 경우 ISO-4138: Steady-state circular driving behavior 문서를 인용하였다. 해당 문서는 차량의 횡방향 거동을 테스트하기 위한 시나리오를 구분하였으며, 각 시나리오 별 테스트 조건과 과정을 명시하였다.
차량의 횡방향 테스트를 위해 구분된 시나리오는 Table 1과 같으며, 각 시나리오 별 테스트 조건은 다음과 같다. 1번 시나리오의 경우 표준 100 m 반경을 가져야 하며, 최소 30 m의 반경을 가져야 한다. 2번 시나리오의 경우 최소 20 m의 반경을 가져야 하나 100 m까지 증가시킬 수 있다. 3번 시나리오의 경우 표준 100 kph 속도를 가져야 하나, 필요한 경우 20 kph 단위로 조절할 수 있다.
Table 1.
Vehicle lateral dynamics test scenarios
| Test Scenario | |
| 1) | Constant Radius |
| 2) | Constant Steering Wheel Angle |
| 3) | Constant Speed |
2.2. 정합성 검증 파라미터
차량의 동역학 정합성 검증을 위하여 파라미터를 선정하였다. 차량의 거동을 검증하기 위한 파라미터와 주행 환경을 검증하기 위한 파라미터를 구분하였다. 차량 거동 검증 파라미터의 경우 실제 차량의 모션 데이터와 시뮬레이션 차량 모델의 모션 데이터 간 성능을 비교할 수 있는 파라미터를 선정하였으며, 주행 환경 검증 파라미터의 경우 실제 차량과 얼마나 동일하게 주행할 수 있는지를 비교할 수 있는 파라미터를 선정하였다.
2.2.1. 차량 거동 검증 파라미터
차량 거동 검증을 위한 파라미터는 종방향과 횡방향을 구분하여 선정하였다. 종방향의 경우 차량의 속도, 종방향 가속도 데이터를 검증 파라미터로써 선정하였으며, 횡방향의 경우 차량의 속도, 횡방향 가속도 데이터를 검증 파라미터로써 선정하였다.
해당 데이터는 실제 차량과 시뮬레이션 차량 모델 간 모션 데이터를 비교할 수 있는 파라미터이며, 실제 차량과 시뮬레이션 차량 모델이 얼마나 유사한 거동을 보이는지 평가할 수 있다.
2.2.2. 주행 환경 검증 파라미터
주행 환경 검증을 위한 파라미터는 주행 경로의 오차 값으로 선정하였다. 이는 실제 차량의 주행 경로를 시뮬레이션 차량 모델이 얼마나 유사하게 주행하는지 평가할 수 있다.
2.3. 차량 모델 검증 시스템 구성
2.3.1. 시스템 흐름
차량 모델 검증 시스템의 흐름은 Fig. 1과 같다. 실제 차량의 조향, 스로틀, 브레이크 데이터를 시뮬레이터 차량의 제어 입력으로써 사용한다. 실제 차량의 제어 입력 데이터는 ROS 통신을 통해 시뮬레이터에 입력된다. 제어 입력을 통해 시뮬레이션 차량의 데이터가 출력된다.
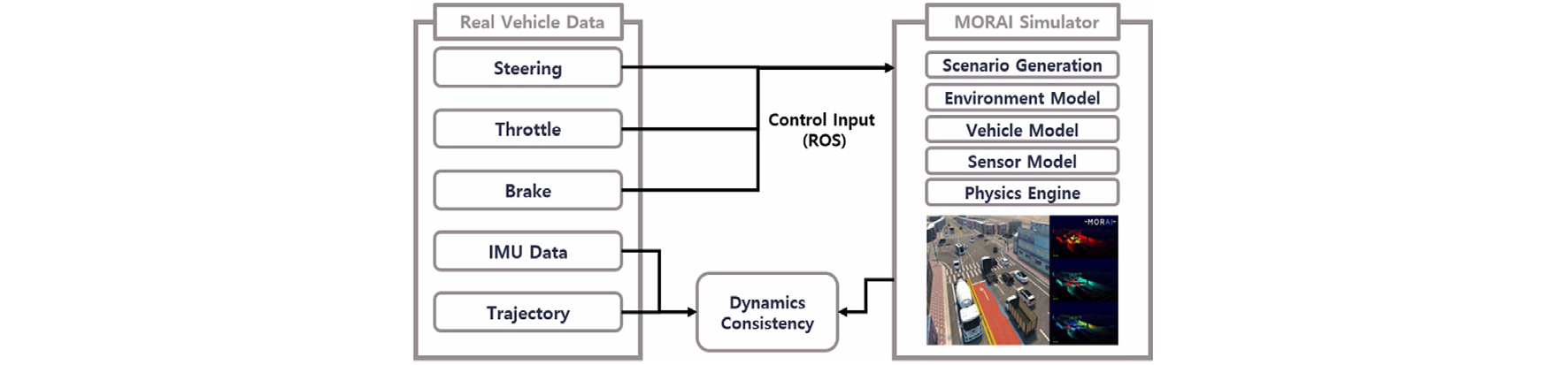
이 과정을 통해 도출된 IMU(Inertial Measurement Unit) 데이터는 차량 거동 검증 단계에서 차량 동역학 정합성을 검증하는데 사용한다. 주행 환경 검증 단계에서는 실제 차량의 제어 입력을 통한 시뮬레이션 차량의 주행 경로와 실제 차량 주행 경로를 비교한다.
2.3.2. 시뮬레이션 환경
자율주행 시뮬레이터인 MORAI SIM을 사용하여 시뮬레이션 환경을 구축하였다. MORAI SIM은 Unity 기반의 자율주행 시뮬레이터로 다양한 정밀지도, 차량 및 센서 모델을 제공하여 자율주행 알고리즘 검증에 활용된다. 환경 세팅과 PC상세 성능은 Table 2와 같다.
Table 2.
Simulation environment and control pc setup
| Environment Setup Specification | ||
| Parameter | Specification | |
| Ubuntu (ROS) | Version | 20.04 |
| Rate | 50 HZ | |
| Control PC | Memory | 32 GB |
| CPU | Intel I7-14700K | |
| GPU | RTX 4060TI | |
ROS기반 통신을 위하여 Ubuntu 20.04 버전을 사용하였으며, 시뮬레이터의 제어 주기는 50 HZ 로 설정하였다. 제어 PC의 경우 메모리는 32 GB, CPU는 Intel I7-14700K, GPU는 RTX 4060TI 로 구성하였다.
2.3.3. 검증 실험 차량
검증을 위한 차량은 기아 모하비 차량을 사용하였으며, 차량의 정보는 Table 3과 같다.
Table 3.
Verification vehicle specification
| KIA Mohave | |
| Parameter | Specification |
| Curb Weight | 2,055 kg |
| Wheelbase | 2,895 mm |
| Horsepower | 260 hp |
| Torque | 56 kg.m |
2.3.4. 데이터 수집 하드웨어
차량의 데이터 취득을 위한 시스템 구성은 Fig. 2와 같다. 차량의 위치 정보와 모션 정보, 제어 입력 정보를 기록하기 위하여 GNSS, 가속도 측정 장치, 가감속 및 조향 명령 측정 장치로 구성되어 있다.

데이터 취득은 Fig. 2의 장비를 2.3.3의 검증 실험 차량에 부착하여 수행하였다. 다음 3장과 4장의 차량 거동 검증과 주행 환경 검증을 위하여 IMU를 통하여 가속도를 측정하여 차량의 모션 정보를 수집하였으며, 가감속 및 조향 명령 측정 장치를 통하여 차량의 제어 입력 정보를 수집하였다.
차량 거동 검증 시나리오의 경우 지능형 자동차 부품 진흥원(KIAPI)에서 실제 차량 데이터를 수집하였으며, 주행 환경 시나리오의 경우 자동차 안전 연구원(KATRI)의 K-City에서 데이터를 수집하였다.
3. 차량 거동 검증
3.1. 차량 거동 검증 시나리오
차량 거동 검증은 실제 차량과 시뮬레이션 차량 모델 간의 모션 데이터를 비교하기 위하여 수행하였으며, 종방향 검증 시나리오와 횡방향 검증 시나리오를 구분하여 선정하였다. 각 시나리오에서 2.2.1절에서 선정한 차량 거동 검증 파라미터를 통해 성능을 비교하였다.
3.1.1. 종방향 거동 검증 시나리오
종방향 거동 검증 시나리오는 2.1.1절의 종방향 정합성 평가를 위한 문서에 기반하여 선정하였다. 해당 문서는 직진 주행 상황에서 일정 속도에 도달한 후 Full Braking을 수행한다.
검증을 위한 속도는 50 kph 로 설정하였으며, 50 kph에 도달한 후 정상 상태를 유지하기 위해 3초간 속도를 유지한다. 이 후 Full Braking을 수행한다. 해당 시나리오에서 2.2.1 절과 같이 속도, 종방향 가속도 데이터를 비교하여 성능을 검증하였다.
3.1.2. 횡방향 거동 검증 시나리오
횡방향 거동 검증 시나리오는 2.1.2절의 횡방향 정합성 평가를 위한 문서에 기반하여 선정하였다. 해당 문서에서는 횡방향 거동을 평가하기 위한 시나리오를 Table 1과 같이 세 가지로 구분하였으며, 각 시나리오에 대한 평가 방법을 구분하였다.
검증을 위하여 1번 시나리오인 Constant Radius 시나리오를 선정하였다. 해당 시나리오를 수행하기 위한 원의 반경은 40 m로 설정하였으며, 이 과정에서 2.2.1 절과 같이 속도, 횡방향 가속도 데이터를 비교하여 성능을 검증하였다.
3.2. 평가 결과
종방향과 횡방향 검증에 대한 샘플 데이터는 Fig. 3, Fig. 4와 같다. 성능 비교를 위한 지표는 R-squared를 사용하였으며 Eq. (1)과 같다. 이는 독립변수가 종속변수를 얼마나 잘 예측하는지 판단하는데 사용하며, 0과 1 사이의 값을 가진다. 상관관계가 높을수록 1에 가까워지며, 이는 모델의 연관성이 높다는 것을 의미한다. SST는 총제곱합, SSR은 회귀제곱합, SSE는 잔차제곱합을 의미한다.
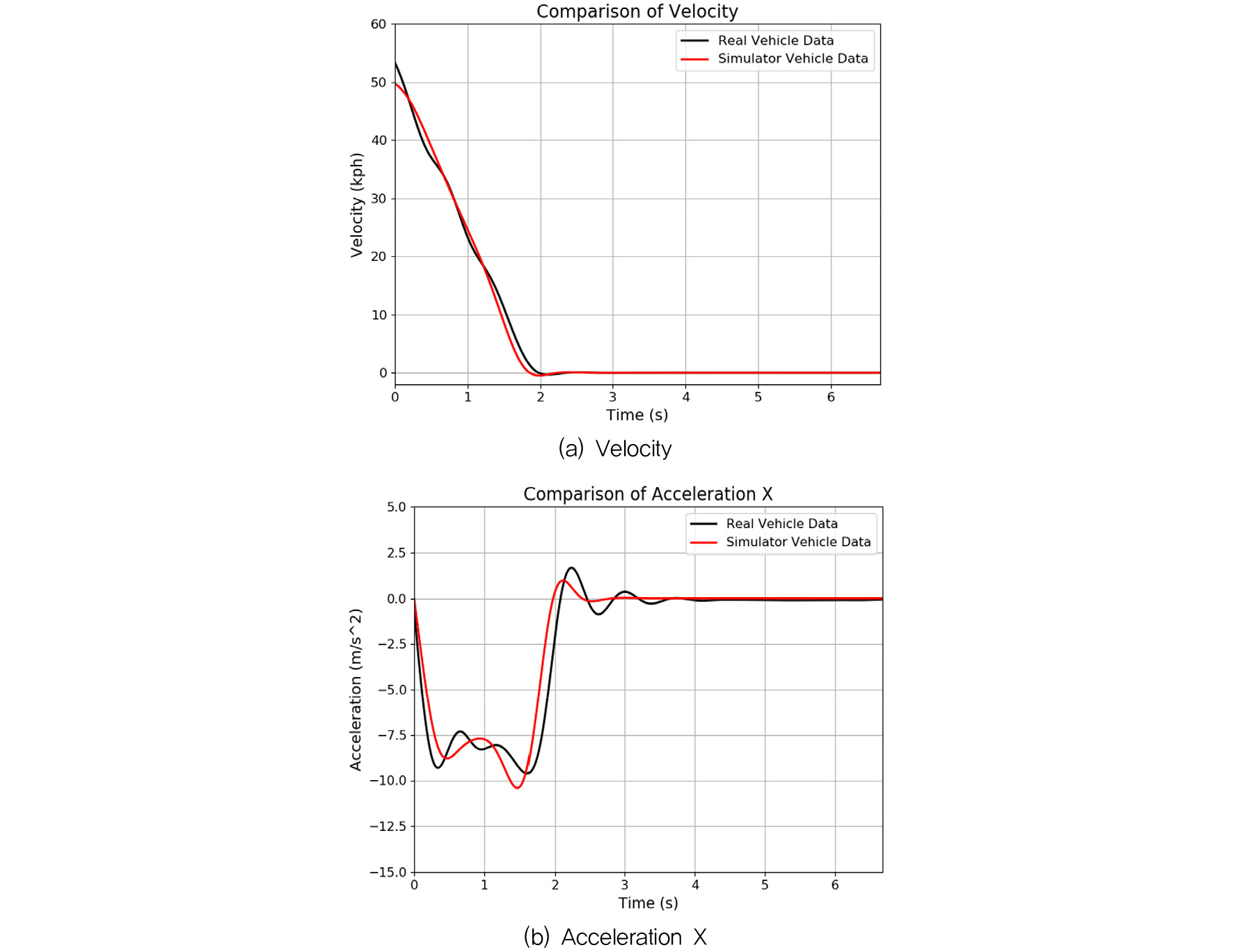
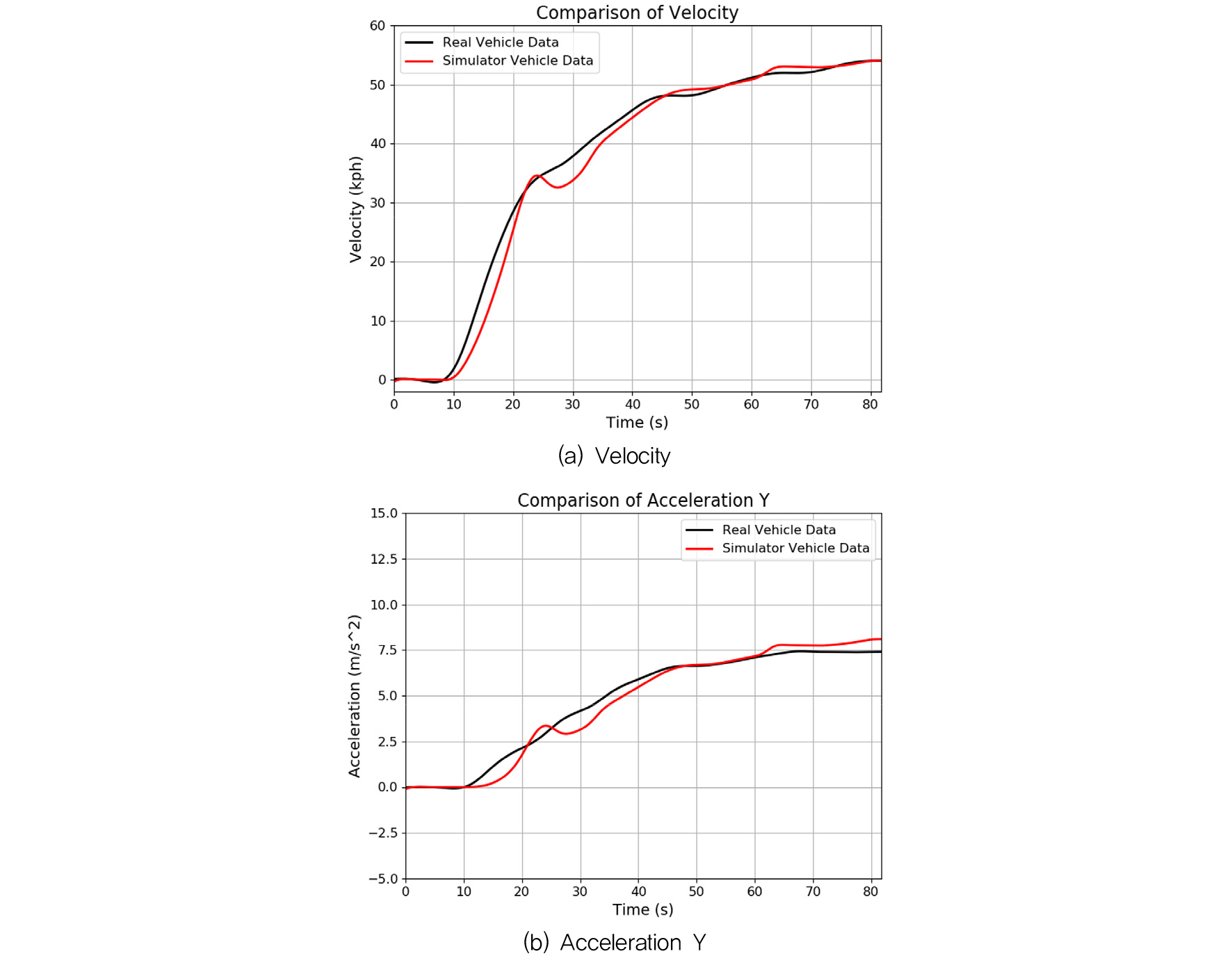
앞서 언급한 R-squared 지표를 바탕으로 종방향 거동 검증 시나리오와 횡방향 거동 검증 시나리오를 통하여 차량 거동을 평가하였다. 종방향 거동 검증 평가의 경우 앞서 언급한 속도, 종방향 가속도를 비교하였으며, 횡방향 거동 검증 평가의 경우 속도, 횡방향 가속도를 비교하였다. 각 파라미터에 대한 성능 비교는 Table 4와 Table 5와 같다.
4. 주행 환경 검증
주행 환경 검증의 경우 시뮬레이션 차량 모델이 실제 차량과 얼마나 유사하게 주행하는지 비교하기 위한 주행 환경 검증 방법을 제안한다. 이러한 검증은 자율주행 시스템의 개발 및 테스트 단계에서 시뮬레이션의 신뢰성을 확보하는데 필수적이다.
4.1. 주행 환경 검증 시나리오 선정
주행 환경 검증 시나리오의 경우 자동차안전연구원의 K-City와 같은 환경을 선정할 수 있다. K-City의 경우 도심로 주행 시나리오뿐만 아니라 고속도로 환경과 같은 실제 도로 환경을 모사한 다양한 주행 상황을 포함하고 있다. 또한 신호등, 횡단보도, 교차로 등 다양한 도로 인프라를 포함하고 있으며, 직선로와 곡선로를 비롯한 다양한 도로 형상을 구비하고 있다. 이처럼 실제 도로 환경을 모사한 테스트 베드의 경우 표준화된 환경으로 반복 가능한 실험을 설계할 수 있으며, 차량 모델의 동적 특성을 종합적으로 평가하는데 적합하다.
4.2. 주행 환경 검증 파라미터
시뮬레이션 차량 모델과 실제 차량 간의 주행 특성 비교를 위하여 경로 추종 정확도, 속도 프로파일 유사성, 차량 동역학 특성, 제어 응답성 등 다양한 핵심 파라미터를 선정하여 검증할 수 있다.
5. 결 론
본 연구에서는 차량 동역학 정합성 향상을 위한 시뮬레이션 환경의 검증 기법을 제안하고, 그 성능을 평가하였다. 종방향 및 횡방향 차량 거동을 검증하기 위해 실제 차량 데이터를 활용하여 시뮬레이션 환경과 비교 분석하였다. 그 결과 종방향에서는 속도와 가속도 데이터에서 높은 정합성을 보였으며, 횡방향에서도 유사한 성능을 확인할 수 있었다. 이를 통해 시뮬레이션 차량 모델이 실제 차량 거동과 높은 수준의 일치성을 보였으며, 이는 시뮬레이션 환경이 실제 차량의 물리적 특성을 효과적으로 반영하고 있음을 알 수 있다. 본 연구는 실제 환경에서의 물리적 테스트를 최소화하여 비용과 위험을 감소시킬 뿐 아니라, 자율주행 차량 기술의 신뢰성을 확보하는데 기여할 수 있는 차량 동역학 시뮬레이션 환경 검증 기법을 제안하였다. 향후 연구에서는 다양한 차량 모델과 복잡한 시나리오를 포함하여 정밀한 검증 기법을 개발할 필요가 있다.
