

1. 서 론
2. eHMI 기술의 현장 평가 방법론
2.1. eHMI 의사소통 필요 구간 설정
2.2. eHMI 의사소통 메시지 표출 방법
2.3. 실험 환경 조건 및 횡단 반응 실험 수행 방법
3. 데이터 수집 및 구축
4. 분석결과
4.1. ‘메시지 없음’ 상황의 횡단 반응
4.2. ‘양보’ 메시지 제공 상황의 횡단 반응
5. 결 론
1. 서 론
도로의 원활한 흐름은 운전자와 보행자 간의 효율적인 의사소통에 근거하며 이러한 의사소통은 주로 빛, 손짓, 소리 등의 비언어적이고 명시적인 행동으로 이루어진다. 하지만 자율주행 기술의 발전으로 운전자가 없는 자율주행차량이 등장하면서 자율주행차가 기존 운전자를 대신하여 보행자와 도로를 공유하며 상호작용하는 상황을 대비해야 한다.(1) 이를 위해 운전자와 보행자 간 의사소통을 위한 대체 수단으로 차량의 외부 등화장치를 활용한 시각적 외부 인간-기계 인터페이스(External Human-Machine Interfaces, eHMI)가 제안되었으며,(2) 2012년부터 미국과 유럽에서 자율주행차량과 보행자 간 의사소통에 관한 연구가 진행되었다.(3)
미국 도로교통안전국(National Highway Traffic Safety Administration, NHTSA)은 자율주행차량이 주행상태 정보를 제공하는 기능을 장착하도록 권고하며, 국제자동차기술자협회(Society of Automotive Engineers, SAE) 산하의 램프 관련 그룹인 J3134는 자율주행차량의 외부 표시장치에 관한 세부 사항을 규정하여 해당 장치의 장착을 유도하고 있다.(4) 우리나라의 경우 2020년 국토교통부가 레벨4 자율주행차의 제작 안전 가이드라인을 발표하였으며 eHMI를 사고 저감을 위한 상호작용 기술 항목으로 언급한 바 있다.(5) 이와 같이 자율주행차와 보행자 간 의사소통을 위한 eHMI의 중요성이 대두되면서 eHMI의 설계부터 이용자 수용성에 관한 내용에 이르기까지 폭넓은 분야의 연구가 활발하게 진행되고 있다.(6)
eHMI 연구 및 실험 방법은 이미지나 영상을 컴퓨터 스크린을 통해 보여주고 응답하는 스크린 조사와 시뮬레이터 또는 가상환경에서의 피실험자의 반응을 측정한 연구, 그리고 실제 도로 실험에서의 이용자의 행태를 측정하는 방법의 연구로 분류되며 각각 장단점을 지닌다. 컴퓨터 스크린 테스트는 제어된 환경에서의 반복 테스트를 통해 효율적인 데이터 수집이 가능하다는 장점이 있지만 실제 움직이는 환경에서의 동적인 평가는 어려우며 스크린을 통한 경험은 현실과 차이가 나타난다는 한계점이 존재한다.(7) 가상환경이나 시뮬레이터를 활용한 연구는 실제 위험 요소 없이 다양한 사고 시나리오의 테스트가 가능하고 초기 구축 비용이 들지만 한 번 구축하면 반복 테스트가 가능하다는 장점이 있다. 하지만 이 또한 실제 도로 환경에서의 피실험자의 동적인 움직임과 차이가 있을 수 있다.(8) 마지막으로 실도로 테스트는 현장에서의 보행자의 행동을 관찰하고 측정하는 방법으로, 스크린과 가상환경에서 관찰하기 어려운 피실험자의 자연스러운 행동과 반응을 포착할 수 있다는 장점이 있지만 실제 차량과 보행자가 이동하며 이루어지는 실험의 경우 사고 위험이 발생할 수 있으므로 통제되고 안전이 확보된 공간에서 제한된 시나리오의 실험 진행이 요구된다.(9) 이러한 문제로 현장 또는 실제 도로에서의 명시적인 의사소통을 위한 eHMI의 효과 평가 연구는 스크린과 가상환경에서의 연구에 비해 상대적으로 부족한 실정이다.
Horn et al.(2023)은 H2020 interACT 프로젝트에서 eHMI에 대한 보행자의 반응을 조사하기 위해 24명의 피실험자를 대상으로 손을 들어 횡단 결정 의지를 표현하는 조사를 테스트 트랙(Test track)에서 수행하였으나 eHMI가 보행자의 횡단 결정이나 감속 인식에 효과가 없다는 결과가 나타났고,(10) Clamann et al.(2017)은 차량 전방에 eHMI를 설치하고 실제 도로에서 보행자들에게 횡단 정보를 제시한 후, 피실험자들이 횡단 의사를 밝히기 위해 손을 들어 표현하도록 한 결과, eHMI에 따른 안전한 횡단 결정에 유의한 차이가 나타나지 않았다.(11) Faas et al.(2020)은 59명의 피실험자를 대상으로 다양한 eHMI 설계에 대한 사용자 경험을 평가하였으며, Daimler AG 주행장에서 가짜 자율주행차가 보행자로부터 51 m 거리에서 최대 30 km/h 속도로 주행하고 25 m 지점에서 양보하기 시작하여 7 m에서 정지하는 시나리오에 대해 테스트하였다. 영상 촬영을 통해 보행자의 횡단 시작 시간을 측정하였고 다양한 eHMI를 경험한 피실험자는 설문지를 통해 신뢰성, 안전성, 사용자 경험을 평가하였다. ‘상태+의도’ 정보 제시 시 횡단이 빠르게 시작되었으며, ‘상태+인식’ 정보 제시했을 때 횡단이 늦어졌다.(12) Habibovic et al.(2018)의 연구는 자율주행차와 보행자 간 상호작용을 개선하기 위한 eHMI를 설계하고 평가하는 연구를 수행하였고, 실험 차량의 전면 유리 상단에 디스플레이 장치를 설치한 후 차량이 보행자로부터 약 50 m 거리부터 12 km/h의 속도로 이동하여 5 m 위치에서 정지하는 시나리오로 주행하였다. 주변에 보행자가 있는 경우 ‘I’m in automatic mode’ 신호를, 양보하려고 하면 ‘I’m about to yield’ 신호를, 또한 차량이 멈췄을 때 ‘대기 중’ 신호를 활성화하였다. 또한 차량이 정지 후 주행을 시작할 때 ‘I’m to start driving’ 신호가 활성화되도록 설계하였다. 실험 후 설문지를 응답을 통해 eHMI가 보행자의 안전감에 긍정적인 영향을 미치는 것을 확인하였다.(13) 이와 같이 실제 트랙에서 진행된 현장 연구는 횡단 결정 시 손을 들거나 버튼을 누르는 등 횡단 결정을 위한 대체 동작으로 횡단을 표현하였으며, 이는 실제 동작과의 간극이 발생할 수 있어 실도로에서 피실험자의 실제 움직임에 대한 실험을 통해 메시지의 효과를 평가할 필요가 있다. 또한 기존 연구의 결과를 살펴보면 eHMI의 효과에 상충되는 결과가 나타났다.(14)
이상의 선행연구와 같이 국외에서는 이미 현장 연구가 활발히 진행되고 있는 것과 대조적으로, 국내에서는 eHMI의 중요성이 높음에도 불구하고 관련 연구가 다소 부진한 실정이다. 이러한 상황을 고려할 때, eHMI에 대한 연구는 시기적절하며 매우 필요하다고 할 수 있다.
따라서 본 논문에서는 레벨 4 자율주행차의 도심 운행 시 보행자와의 의사소통을 위한 eHMI 기술에 대한 현장평가를 위한 방법론을 제안한다. 2장에서는 eHMI 기술의 현장 평가를 위한 의사소통 필요 구간과 실험 환경 그리고 메시지 표출 방법을 설정하여 횡단 반응실험 수행 방법 및 절차 기술한다. 3장에서는 데이터 수집 및 구축 방법을 기술하고, 4장에서는 eHMI 메시지에 따른 횡단 반응실험 결과에 대하여 서술한다. 5장에서는 본 논문의 결론을 맺는다.
2. eHMI 기술의 현장 평가 방법론
자율주행차-보행자 간 의사소통을 위한 eHMI 기술의 현장 평가를 위한 방법론을 개발하기 위해 차량과 보행자 간 의사소통이 필요한 구간을 설정하고 의사소통을 위한 메시지 표출 방법을 선정하였다.
2.1. eHMI 의사소통 필요 구간 설정
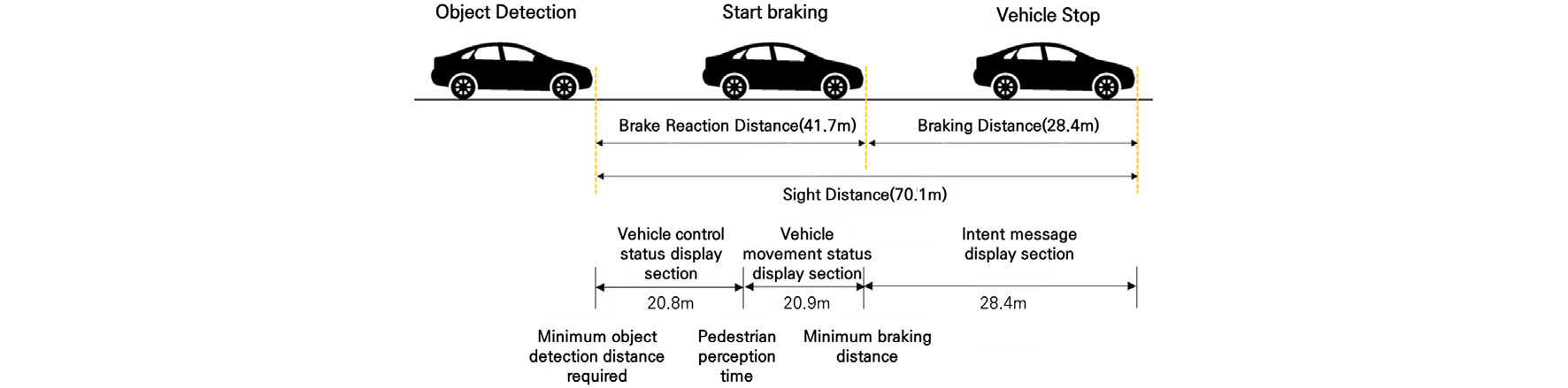
자율주행차가 메시지를 제공하면서 안전하게 이동하고 제동하기까지의 거리인 객체 탐지 요구 거리를 의사소통 필요 구간으로 정의하였으며 Table 1과 같다. 자율주행차 개발기업의 ‘객체 탐지 시간’인 3초를 적용하였을 때,(15) 미국 주도로 및 교통 행정관 협회(American Association of State Highway and Transportation Officials, AASHTO)의 노면 습윤상태의 종방향 미끄럼 마찰계수(0.347)를 적용하여 정지거리를 산출할 경우,(16) 시속 50 km 차량의 최소 객체 탐지 요구 거리는 70.1 m이며, 시속 30 km 차량의 최소 객체 탐지 요구 거리는 35.2 m로 추산된다.
Table 1.
Defining the distance requiring explicit communication
| Vehicle speed | Object detection distance | Braking distance |
Communication required distance for autonomous vehicles |
| 50 km/h | 41.7 m | 28.4 m | 70.1 m |
| 30 km/h | 25 m | 10.2 m | 35.2 m |
차량은 Fig. 1과 같이 객체가 탐지되면 제어권 상태를 알리는 메시지를 제공하고, ‘보행자 인지 시간’인 1.5초 이동 후 ‘통과 예정’ 또는 ‘감속 중’이라는 움직임 상태 메시지를 제공한다. 2단계 메시지가 감속일 경우, 서서히 감속하여 정지하면 되지만, ‘통과 예정’일 경우 최소 제동거리에서 경고 메시지와 함께 제동을 시작하여야 한다.
자율주행차량은 속도에 따라 요구되는 최소 정지거리에서 도로 이용자를 인지하고 제동 명령을 내리기 위해 주변의 도로 이용자와 교통 상황을 사전에 인지 및 판단하고 있어야 한다. 또한 해당 구간에서 의사소통을 위한 메시지는 제시 방법(단독 메시지 또는 단계별 메시지)과 내용(양보, 경고)에 따라 세부적으로 추가 설정되어야 한다.
2.2. eHMI 의사소통 메시지 표출 방법
자율주행차량이 실제로 메시지를 제시하는 환경과 상황에서의 메시지 평가를 위해서는 메시지가 제시되는 방법과 그 위치에 대한 설정이 필요하다. 인지 심리학에서는 보행자의 횡단 과정(crossing task)을 세 단계(인식-판단-반응)의 정보처리 과정으로 정의하고 있으며,(17) 각 단계에 적합한 메시지를 보행자에게 제시할 필요성이 있다고 판단되어 본 연구에서는 Table 2와 같이 3단계 메시지 표출 방법을 선정하였다. Bindschädel et al.(2022)의 연구 또한 맥락적 메시지를 단계별로 제시 방안을 제안하고 있다.(18)
Table 2.
Strategy for conveying contextual messages
2.3. 실험 환경 조건 및 횡단 반응 실험 수행 방법
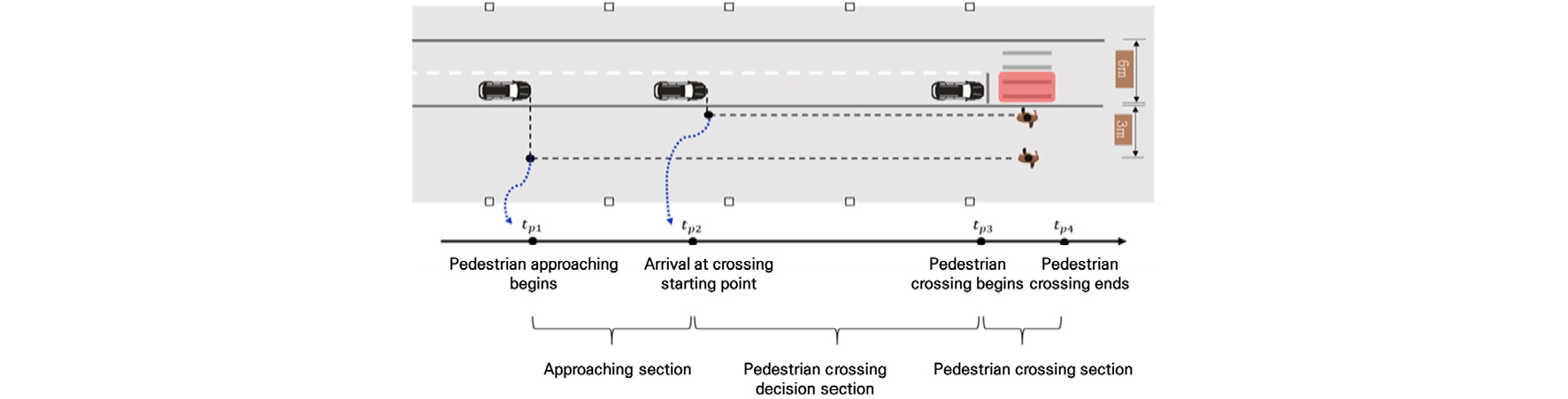
본 연구에서 활용된 시각적 eHMI 기술은 프로젝션 라이팅 기술로 주간 상황에 비해 시계확보가 어려운 야간상황에 ‘빛’을 도로 노면에 투영하여 메시지를 제공하는 기술로 달빛 정도 밝기(1룩스 미만)의 야간도로 환경을 조성하여 실험하였다. 또한 차량과 보행자의 교착상태에서의 메시지의 상호작용 효과를 실험하기 위해 무신호 횡단보도 상황에서 차량과 보행자 모두 움직이는 동적 상황을 연출하여 실험을 수행하였다. 차량은 130 m 거리에서 30 km/h까지 가속하고 정지선으로부터 40 m 거리에서 등감속하여 정지선에서 정지한다. 이때 메시지가 표출되어야 하는 단계별 지점에서 메시지가 표출된다. 이때 피실험자는 횡단보도로부터 3 m 떨어진 거리에서 실험을 시작하며, 실험 시작과 동시에 차량이 출발하면 횡단보도로 접근하고, 횡단을 결정한다.

메시지에 따른 효과를 도출하기 위해서 메시지가 제시되지 않는 ‘메시지 없음’ 상황에서의 횡단 실험을 진행한 후, ‘양보’ 메시지가 제시되는 시나리오에 대한 횡단 실험을 차례로 진행하였다. 피실험자는 전체 횡단 실험 횟수를 안내받았지만, 메시지의 제시 여부와 메시지가 표출되는 정보는 알 수 없는 상태로 실험을 수행하도록 하였다. 90명의 피실험자는 Fig. 3과 같이 ‘메시지 없음’ 상황에서 횡단 반응실험 후 Fig. 4와 같이 ‘양보’ 메시지가 제시되었을 때의 횡단 실험을 차례로 진행하였다.


3. 데이터 수집 및 구축
피실험자는 횡단보도로부터 3 m 떨어진 위치에서 실험을 시작하여 횡단보도로 접근하고 횡단을 결정하였으며, 이때 피실험자는 보행 측정 장비(gaitup lab, Switzerland)를 신발에 장착하고 횡단하도록 하였다. 측정 장비의 IMU 센서를 통해 피실험자의 움직임에 따른 보행 가속도를 측정하였으며, 수집된 raw 데이터는 Fig. 5와 같이 0.0039초 단위의 가속도와 자이로(방향)에 대한 정보로 수집 후 0.1초 단위 속도 데이터로 적분 변환하는 과정을 거쳤다.

Table 3.
Detailed field pedestrian crossing response experiment
그 외 차량의 출·도착 단계별 메시지 제공 시각을 조사원이 기록하였고, 보행자의 횡단보도 접근 시작, 도착, 횡단 시작 시각 데이터를 촬영하고 기록하여 데이터를 Fig. 6과 같이 수집하였으며, 피실험자의 횡단 속도의 측정 시간을 기준으로 차량 속도 데이터와 Table 4와 같이 매칭하여 분석 데이터를 구축하였다.
4. 분석결과
4.1. ‘메시지 없음’ 상황의 횡단 반응
‘메시지 없음’ 상황에서 피실험자의 횡단 결정 여부는 Table 5와 같이 나타났다. 우리나라 「노인복지법」에 따르면, ‘노인’의 연령 기준을 만 65세로 정의하고 있어, 이를 바탕으로 본 연구에서는 일반보행자를 만 18세 이상 65세 미만, 고령 보행자를 만 65세 이상의 보행자로 구분하였다. 일반보행자의 경우 60명의 피실험자 중 55.0%(33명)은 횡단을 결정하였고 나머지는 횡단을 포기하였다. 고령 보행자의 30명의 피실험자 중 63.3%(19명)가 횡단을 결정하였다. 고령자의 횡단 결정 수가 일반 보행자보다 높지만 유의한 차이는 나타나지 않았다. 성별에 따른 횡단 결정은 남성 중 63.0%(29명), 여성 중 52.3%(29명)가 횡단 결정을 결정하였으나 유의한 차이는 나타나지 않았다.
Table 5.
Pedestrian crossing decisions without eHMI message
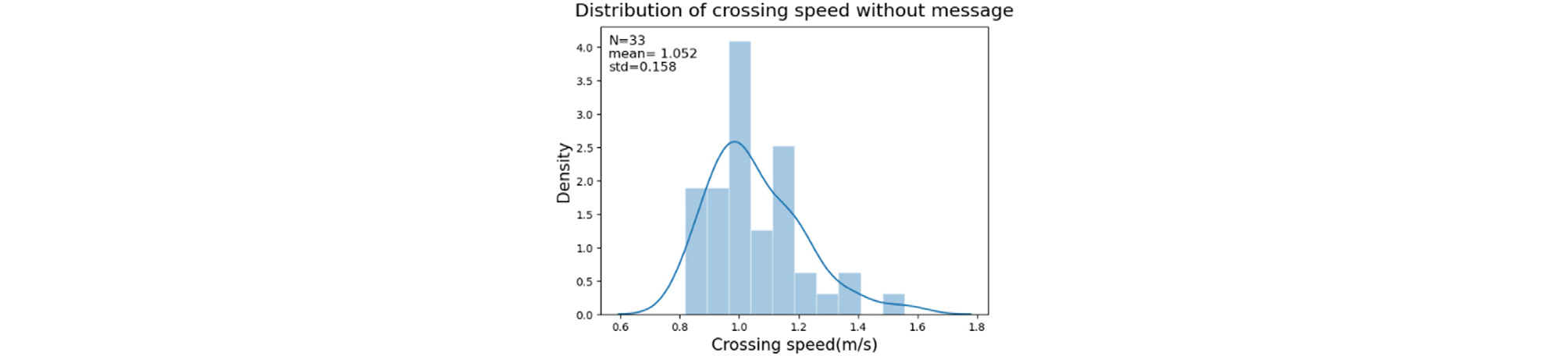
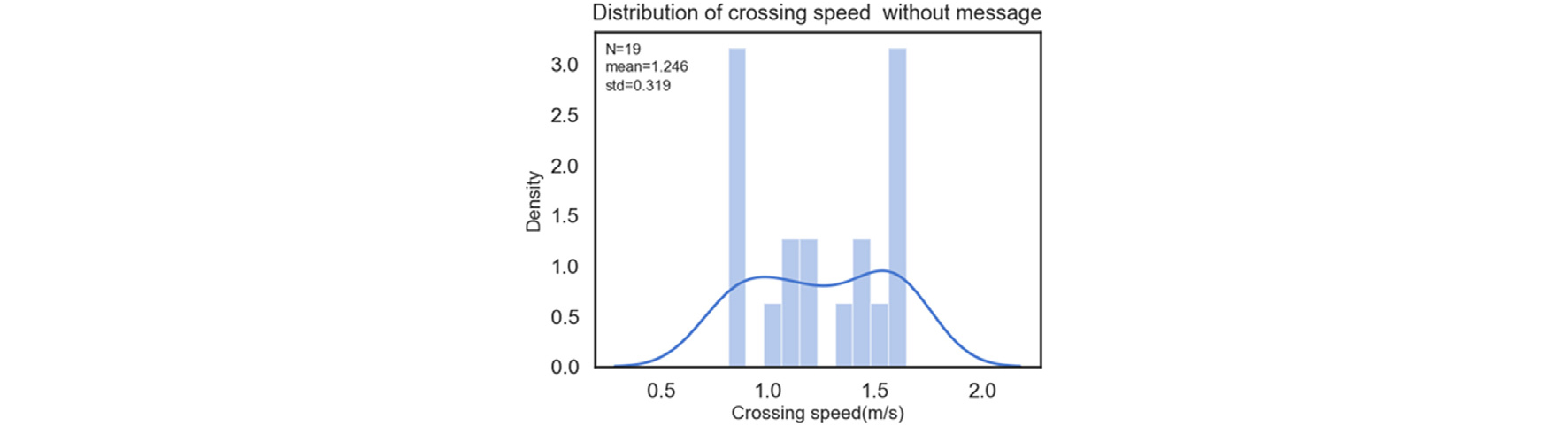
‘메시지 없음’ 상황에서 횡단을 결정한 피실험자의 횡단 속도는 Table 6과 같은 결과가 나타났다. 일반 보행자의 횡단 속도는 평균 1.052(m/s), 표준편차 0.158(m/s)이며, 고령 피실험자의 횡단 속도는 평균 1.246(m/s), 표준편차 0.319(m/s)로 고령 피실험자의 횡단 속도가 일반 피실험자보다 유의수준 10% 수준에서(t=1.89, p=0.073*) 빠르며 속도의 편차도 큰 결과가 나타났다.
Table 6.
Crossing speed of pedestrians in a ‘no message’
| Age | Pedestrian crossing speed (m/s) |
Independent t-test (p-value) | |
| Average | Std | ||
| Non-eldery | 1.052 | 0.158 | 1.89 (0.073*) |
| The eldery | 1.246 | 0.319 | |
‘메시지 없음’ 상황에서 피실험자들의 횡단 속도 분포는 Fig. 7과 Fig. 8에서 확인할 수 있듯이 서로 다른 결과가 나타났다. 일반 보행자의 횡단 속도 분포는 Fig. 7과 같이 정규분포를 따르면서도 오른쪽으로 꼬리가 긴 분포를 보였다. 이는 일반 보행자들의 대부분이 평균보다 느린 속도로 이동하지만, 일부 보행자들은 상대적으로 빠르게 이동하는 경향이 있음을 의미한다. 반면, 고령 보행자의 횡단 속도 분포는 Fig. 8에서 확인할 수 있듯이 두 개의 봉우리(이분형 패턴, bimodal pattern)를 보였다. 이는 고령 보행자들이 ‘메시지 없음’ 상황에서 두 가지 주요 행동 패턴으로 나뉘어 있음을 시사하는데, 일부 고령 보행자는 매우 느린 속도로 횡단하는 반면, 다른 일부는 빠른 걸음이나 뛰는 방식으로 횡단하는 양상을 보였다. 이처럼 평균 횡단 속도는 큰 차이가 없었으나, 분포 형태에서 고령 보행자와 일반 보행자 간에 뚜렷한 차이가 발생하는 것을 확인할 수 있었다.
4.2. ‘양보’ 메시지 제공 상황의 횡단 반응
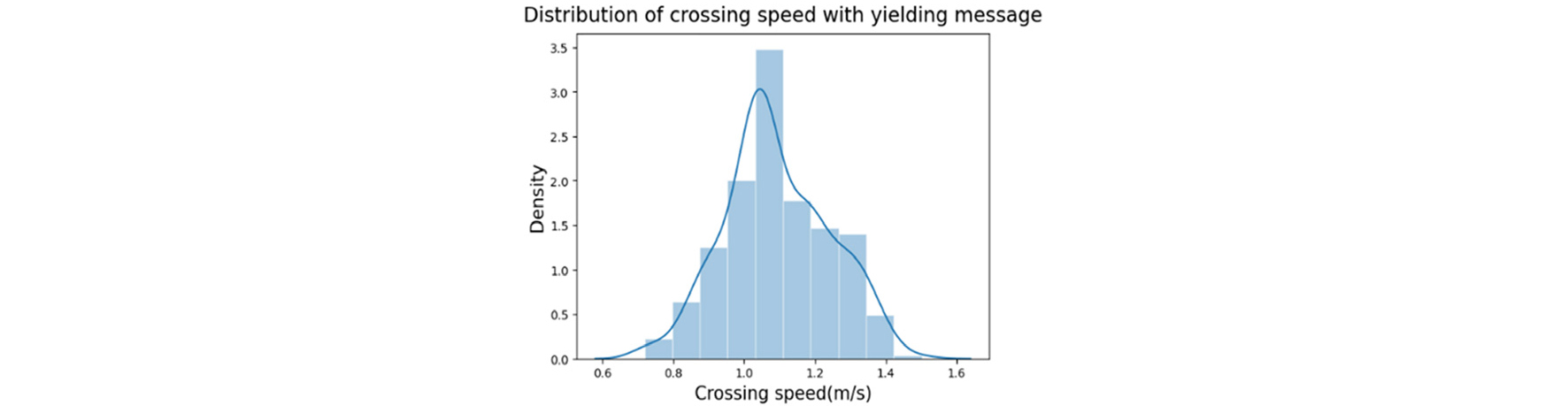
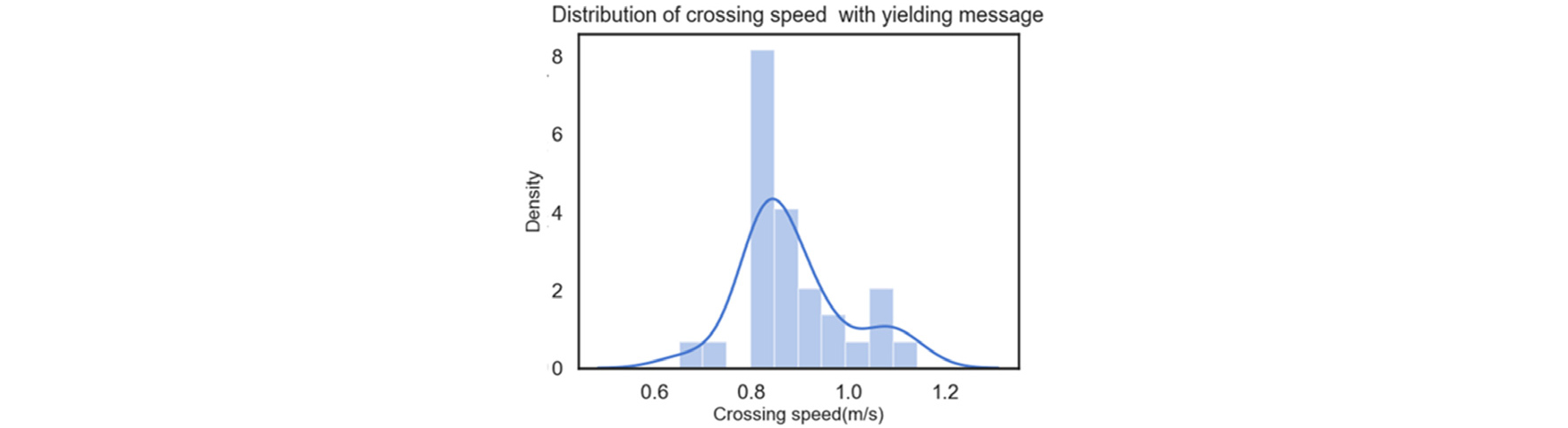
‘양보’ 메시지가 제시되었을 때 피실험자들의 횡단 속도는 Table 7과 같이 나타났다. 일반 보행자의 경우 ‘양보’ 메시지가 주어졌을 때 평균 횡단 속도는 1.092 m/s, 표준편차는 0.147 m/s로, ‘메시지 없음’ 상황(평균 1.052 m/s)과 비교했을 때 0.04 m/s 증가하였다. 그러나 이 변화는 통계적으로 유의미하지 않으며(t=0.975, p=0.330), ‘양보’ 메시지가 일반 보행자의 속도에 영향을 미친다고 할 수 없다. 반면, ‘양보’ 메시지가 주어졌을 때 고령 보행자의 평균 횡단 속도는 0.885 m/s, 표준편차 0.110 m/s로, ‘메시지 없음’ 상황(평균 1.246 m/s)과 비교해 -0.361 m/s 감소하였으며, 이는 유의수준 1%에서 통계적으로 매우 유의미한 차이가 나타났다(t=-8.738, p=0.000***). 이러한 결과는 ‘양보’ 메시지가 고령 보행자들의 뛰거나 빠르게 걷는 행동을 줄여, 안정적인 속도로 횡단하게끔 영향을 미쳤음을 시사한다.
Table 7.
Crossing speed of pedestrians in a ‘Yielding message’
‘양보’ 메시지 제시 후 횡단 속도의 분포는, 일반보행자의 경우 더 많은 보행자의 횡단 결정이 발생하여 ‘메시지 없음’ 상황에서 왼쪽으로 치우친 분포에서 Fig. 9와 같이 정규분포 형태로 변화하였다. 고령자의 경우도 ‘메시지 없음’ 상황에서 나타났던 양분형 횡단 속도 분포가 Fig. 10과 같이 안정적인 패턴으로 변화하였고 표준편차도 작아진 것을 볼 수 있다.
5. 결 론
본 연구는 레벨 4 자율주행차의 도심 운행 시 보행자와의 의사소통을 위한 기술에 대한 현장 평가를 위한 방법론을 개발하였다. 이를 위해 보행자의 횡단 과정(인식, 판단, 반응)에 적합한 3단계 메시지와 표출 위치를 설정하였다. 현장 평가는 고령자 30명을 포함한 총 90명의 피실험자를 대상으로 수행되었으며, 무신호 횡단보도에서 차량이 접근하는 동적 상황에 제시되는 메시지에 따라 피실험자의 횡단 반응을 측정하여 객관적 평가를 진행하였다. 메시지가 제시되지 않는 상황에서 보행자의 일반 횡단 상황을 실험한 결과, 총 90명 중 42.2%(38명)가 횡단을 포기했다. 횡단이 발생했던 집단은 대부분 차량이 정지한 후 횡단을 결정했으며, 특정 일부 보행자 집단에서는 차량 접근 여부와 상관없이 횡단을 결정하는 특성이 나타났다. 개인의 횡단 패턴은 다양하게 나타났으며, 일부 집단은 횡단 시 뛰거나 빠른 걸음으로 횡단하는 특성을 보였다. 이후 ‘양보’ 메시지가 제공되면서 횡단 패턴과 속도 분포에 변화가 나타났는데, 횡단을 포기했던 38명의 피실험자는 모두 횡단을 결정했다. 특히 고령자 중에서는 뛰거나 빠른 걸음으로 횡단하던 집단이 일반 속도로 횡단하는 변화가 관찰되었으며, 전반적으로 횡단 결정이 빨라져 횡단 종료 시간이 단축되었다. 횡단 결정을 위한 대체 동작이나 행동은 실제 도로에서의 보행자들이 횡단을 결정할 때 사용하는 것과는 차이가 있을 수 있기 때문에 실제 도로 환경에서 실험은 매우 중요하다. 횡단 결정에 대한 효과적인 메시지를 개발하고 이를 평가하기 위해서는 실도로에서 피실험자들의 실제 움직임을 관찰하고 분석하는 현장평가에 관한 지속적 연구가 필요하다. 이러한 피실험자들의 행동반응을 통해 기술의 수용성과 메시지의 효과적인 전달 여부를 평가함으로써 자율주행차량과 보행자 간 의사소통을 개선하는 메시지의 효과를 더욱 신뢰할 수 있을 것이다.
