

1. 서 론
2. 자율주행 차량 센서 및 통신 장비 구성
2.1. 환경 센서
2.2. V2V 통신 장비
3. 양보 거동 계획
3.1. Virtual target vehicle 설정
3.2. 목표 거동 생성
4. 종 방향 제어 입력 계산
4.1. 종 방향 동역학 모델
4.2. 목표 거동 최적화
5. 실차 실험 결과
6. 결 론
1. 서 론
첨단 운전자 보조 시스템(Advanced Driver Assistance System, ADAS)이 발전하고 보다 적은 비용으로 기능 구현이 가능해지면서 양산 차량에 ADAS 기술이 점차 보편적으로 적용되고 있다.(1) 대표적인 종 방향 주행 보조 기술로는 Adaptive Cruise Control(ACC)이 있다. ACC는 단순 속도 추종 제어기와 달리 전방 차량과의 거리 및 상대 속도에 따라 목표 속도를 계획하고 추종한다. 횡 방향 주행 보조 기능으로는 Lane Keeping Assistance System(LKAS)가 있는데, 이 기능은 전방 차선 정보를 이용하여 차량이 차로 중심 위치를 유지하도록 운전자의 조작 없이 조향 입력 토크를 생성해 조향 각을 제어한다. 고속도로 및 자동차 전용도로 등 제한적 상황에서의 자율주행 기술의 경우 일부 양산 차량에 적용되어 있다.
반면 혼잡한 도심 교통 상황에서의 자율 주행 기술은 차량에 장착된 환경 센서 만을 이용해 구현하기 어려운 경우가 존재한다. 낮은 속력으로 이동하는 상대 차량의 거동은 예측하기 어려우며, 특히 차선 변경을 수행해 자 차선으로 들어오는 측방 차량의 경우 차선 변경 거동 초기에 미리 양보해 안전거리를 확보해야 한다. 이러한 문제를 해결할 수 있는 방법으로 V2V(Vehicle to Vehicle) 통신을 이용할 수 있다. 차량 간 통신을 이용하면 주변에 존재하는 차량들이 서로의 정보를 공유할 수 있는데, 공유 가능한 정보에는 위/경도 값과 같은 위치 정보뿐 아니라 속도, 조향 핸들 각도, 방향 지시등 정보와 같이 다양한 차량 상태가 포함된다. 따라서 환경 센서와 더불어 V2V 통신으로부터 수신된 정보를 이용하면 상대 차량의 주행 의도를 파악하고 이에 능동적으로 대응할 수 있다.
V2V를 이용하여 보다 광범위한 분야로 확장된 연구들이 진행되고 있다. 대표적인 예로 V2V 통신을 이용한 connected vehicle에 대한 연구를 들 수 있다.(2) 선행 차량을 따라 주행하는 일렬의 차량들은 전방 차량과 일정 거리와 시간 간격을 두고 운행하는데, V2V를 이용할 경우 더 좁은 간격으로 주행할 수 있다. 이는 상용 차량의 관점에서 수송 능력 및 효율 향상을 가져오게 된다.
또한, 상호 협력적 교차로 통과 및 차선 변경 기능을 수행하는 경우에도 V2V 통신을 적용할 수 있다.(3) 통신이 수립된 차량이 아닌 일반 차량에 대해서도 자 차량의 사각지대에 위치해 있지만 후방 차량의 인지 범위 내에 존재할 경우 위험 상황이 발생하기 전에 미인지 차량의 정보를 송신하여 보다 안전하게 주행이 가능하다.(4)
본 논문의 2장에서는 사용된 실험 차량의 환경 센서 및 통신 장비 구성에 대해 기술하였다. 3장에서는 cut in 차량에 대한 양보 거동 계획을 위해 도입한 virtual target vehicle에 대해 소개하고 목표 거동을 계획하는 방법을 제시한다. 계획된 목표 거동을 바탕으로 4장에서는 차량의 종 방향 가속도 입력을 결정하는 모델 예측 제어에 대해 서술하였다. 5장에는 본 연구에서 제시한 V2V 기반 양보 거동 계획 알고리즘을 실제 자율주행 차량을 이용해 검증하였다. 수행한 실험을 통해 저속 상황에서 주행 차선으로 차선 변경하는 측 전방 차량에 대한 양보 거동을 효과적으로 수행하는 것을 확인하였다.
2. 자율주행 차량 센서 및 통신 장비 구성
2.1. 환경 센서
알고리즘 검증 및 실험에 사용된 자율주행 차량의 환경 센서는 총 6개의 라이다 장비로 구성되어 있으며 인지 정보를 처리하는 IBEO ECU 및 자율주행 알고리즘을 수행하는 산업용 PC가 장착되어 있다. 라이다 센서의 구성도 및 인지 각도는 Fig. 1과 같고, 센서의 세부 사양 정보는 Table 1에 표기하였다.
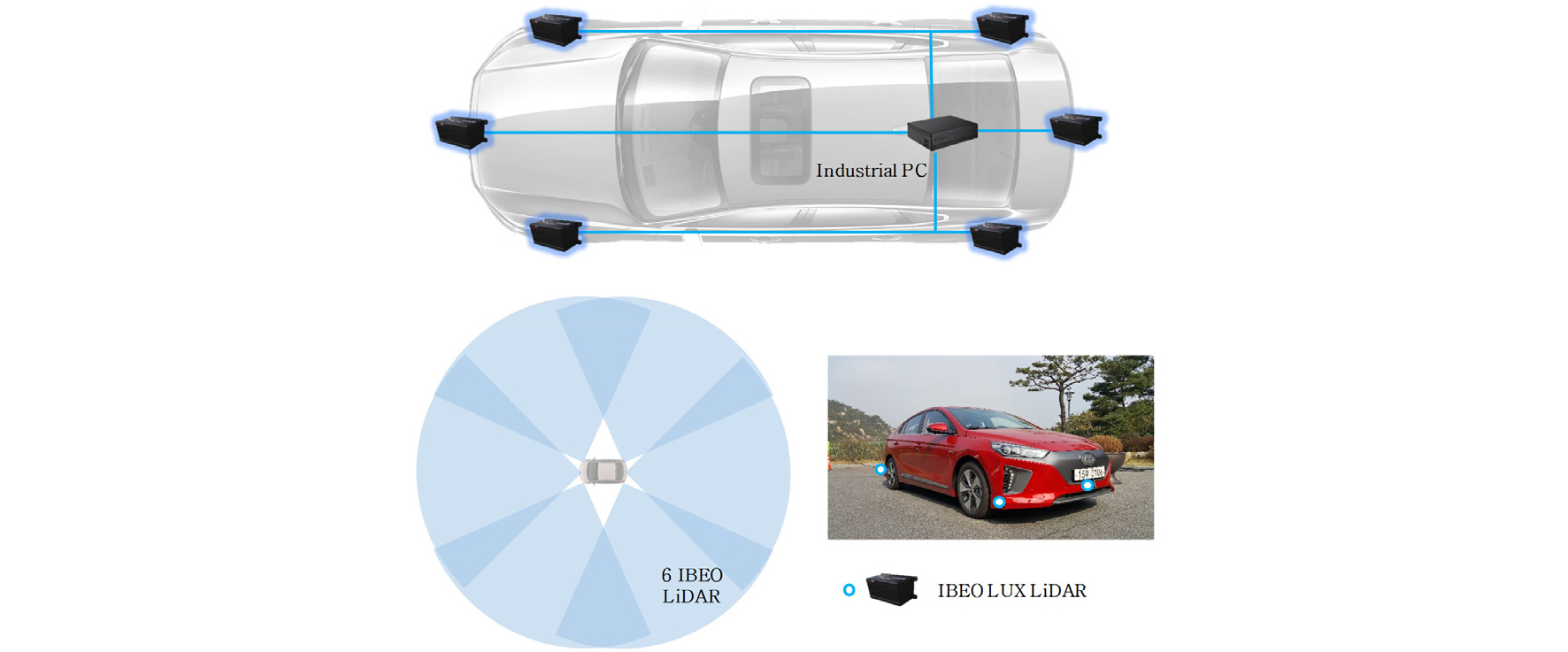
Table 1.
LiDAR sensor specifications
| Components/Model | Specifications |
| LiDAR/IBEO LUX LiDAR |
- 4 scanning layers - Horizontal field of view 4 layers: 85°; to -50°) - Vertical field of view: 3.2° - Data rate: 12.5~50.0 Hz - Accuracy: 10 cm |
라이다 센서로 인지된 점군 데이터는 IBEO ECU 장비에서 clustering 및 classification을 진행하여 타겟 정보로 변환된다. 처리된 타겟 정보와 점군 데이터는 PC로 송신된다.
2.2. V2V 통신 장비
자율주행 차량과 타겟 차량 간 V2V 통신을 위해 두 차량에 On Board Unit(OBU)와 통신 안테나를 각각 장착하였다. 타겟 차량의 센서 신호들은 주기적으로 OBU로 전송되며, WAVE 통신이 가능한 안테나를 통해 송신된다. 이 신호는 자율주행 차량에 장착된 WAVE 안테나로 수신되며 OBU를 거쳐 PC로 입력된다.
3. 양보 거동 계획
3.1. Virtual target vehicle 설정
측 전방에 위치한 차량이 자차선으로 차선을 변경하려는 의도를 인지한 경우, 운전자는 차선 변경에 필요한 안전 거리를 확보한다. 환경 센서 만을 사용하여 주변을 인지하는 자율주행 차량의 경우 상대 차량의 이동 방향이 확실하게 인지된 경우 현재 상태를 바탕으로 미래 거동을 예측할 수 있다. 하지만 정체 상황을 비롯한 혼잡 교통류 주행에서는 상대 차량의 의도를 예측하기 어렵고, 이 때문에 별도의 신호를 통해 차선 변경 의도를 수신할 필요가 있다. 운전자는 쉽게 인지하지만 환경 센서로 수신하기 어려운 대표적인 신호로 방향 지시등이 있는데, V2V OBU를 통해 수신된 상대 차량 정보를 이용하면 해당 차량의 절대 위치와 속도 및 방향 지시등 상태 정보를 알 수 있다.
측 차선에서 방향 지시등을 켜고 자 차선으로 차선 변경을 진행하고자 하는 전방 차량의 의도가 파악되면 해당 차량이 차선 변경을 완료하였을 때 위치하게 될 주행 차선 내 공간을 확보해야 한다. 따라서 본 논문에서는 이 위치에 가상의 타겟 차량을 생성하여 추종함으로써 해당 기능을 구현하였다. 관심 영역 내의 유의미한 차량에 대한 대응을 위해 cut in 차량의 종 방향 위치가 전방 30m 이내, 횡 방향 위치가 주행 차선 중심으로부터 차선 폭의 1/2이상 떨어진 경우 지시등의 방향이 주행 차선 방향과 일치할 때 가상 타겟을 생성하도록 조건을 두었다.
저속 주행 차선 변경 상황에서는 상대 속도 및 상대 종 방향 위치 변화가 작기 때문에 보수적인 대응이 가능하도록 가상 타겟의 종 방향 위치는 현재 cut in 차량의 종 방향 상대 위치와 같게 설정하였다.
3.2. 목표 거동 생성
차선 및 차간 거리 유지 기능을 수행하는 자율주행 자 차량은 가장 가까운 전방 차량을 추종한다. 이 경우 전방 차량과의 종 방향 안전 거리 및 상대 속도를 유지하도록 목표 거동을 계획한다. 전방 차량의 상대 거리가 안전 거리 이내에 존재하는 경우 다음과 같이 목표 속도를 계획한다.
식 (1)에서 vx,road, vx,target는 각각 도로 제한 속도와 전방 차량의 속도를 나타낸다. 전방 차량이 안전 거리보다 멀리 존재하는 경우 식 (2)와 같이 목표 종 방향 거동을 계획한다.(5)
px,target는 자차량 좌표계 기준 전방 차량의 위치를, cx,safe는 전방 차량과의 안전 거리를 의미한다. 합리적인 운전자는 전방 차량이 안전 거리에 비해 매우 멀리 존재하는 경우 안전을 위해 목표 주행 속도를 도로 제한 속도로 설정하고, 전방 차량이 안전 거리 근방에 존재하는 경우 목표 속도를 전방 차량의 주행 속도에 맞추어 주행한다. 이러한 종 방향 속도 계획을 적용하기 위해 전방 차량과의 종 방향 상대 거리에 대한 여유 거리의 비로 정의되는 변수 k를 도입하였다. k는 0과 1사이의 값을 가지며, 양 끝의 값은 각각 여유 거리가 0일 때와 전방 차량이 아주 먼 거리에 있을 때에 해당한다.
4. 종 방향 제어 입력 계산
4.1. 종 방향 동역학 모델
주행 차선 내 전방에 차량이 존재하는 경우 자 차량은 선행 차량과의 안전 거리를 유지하고 제한 속도를 준수하도록 종 방향 거동을 계획한다. 차량의 종 방향 감/가속 입력은 목표 가속도로 주어지게 되며, 입력 지연을 고려한 목표 가속도와 실제 가속도의 관계는 다음과 같은 1차 전달함수의 형태로 나타낼 수 있다.(6)
식 (3)에서 τ는 입력 가속도 값과 실제 가속도 값의 반응에서 시간 상수에 해당한다. 종 방향 속도와 위치, 가속도 사이의 미분 관계식을 이용하면 아래와 같은 종 방향 동역학 모델에 해당하는 식을 얻을 수 있다.
식 (4)에서 종 방향 상태 변수는 xlon=[pxvxax]T이며 입력 변수는 ulon=ax,des이다.
따라서 위 식에 기반하여 입력 신호인 종 방향 목표 가속도에 대한 종 방향 상태를 예측할 수 있다.
4.2. 목표 거동 최적화
종 방향 목표 상태가 결정되면 제어 입력에 해당하는 차량의 종 방향 가속도 입력을 계산해야 한다. 세 개의 종 방향 상태 변수에 대하여 목표 상태와의 오차를 최소화 하기 위해 모델 예측 제어 기법을 사용하였다. 최적화 목적 함수 및 제한 조건은 다음 식 (5)와 같다.(7)
최적화 변수 벡터는 목표 상태 변수와 현재 상태 변수의 차이인 xe=xlon,des-xlon이며, Q와 R은 각각 상태 오차와 입력에 대한 가중치 행렬에 해당한다. Np는 예측 step horizon으로, 본 논문에서는 Np=20을 사용하였다.
현재 시점에서 예측된 미래 시점의 상태 변수는 식 (4)를 이용해 계산하며, 주어진 목적 함수를 최소로 만드는 입력의 sequence 중 첫 번째 값을 현 시점에서의 종 방향 목표 가속도 입력으로 사용한다.
5. 실차 실험 결과
제안된 양보 거동 알고리즘을 시험하기 위해 자율주행 차량 및 일반 차량들을 이용한 실차 실험을 진행하였다. 1차선 전방에 위치한 차량이 2차선 후방에서 주행 중인 자율주행 차량 앞으로 끼어드는 상황을 산정하였으며, 혼잡 교통류 주행을 모사하기 위해 밀집한 차간 거리를 유지한 상태로 반복적인 정차 및 저속 주행을 수행하였다.
측 전방 차량의 차선 변경 의도를 파악하고 양보하여 차선 변경을 완료하기까지 전체 차량의 거동을 4개의 시점으로 나누어 나타낸 결과는 Fig. 2와 같다.
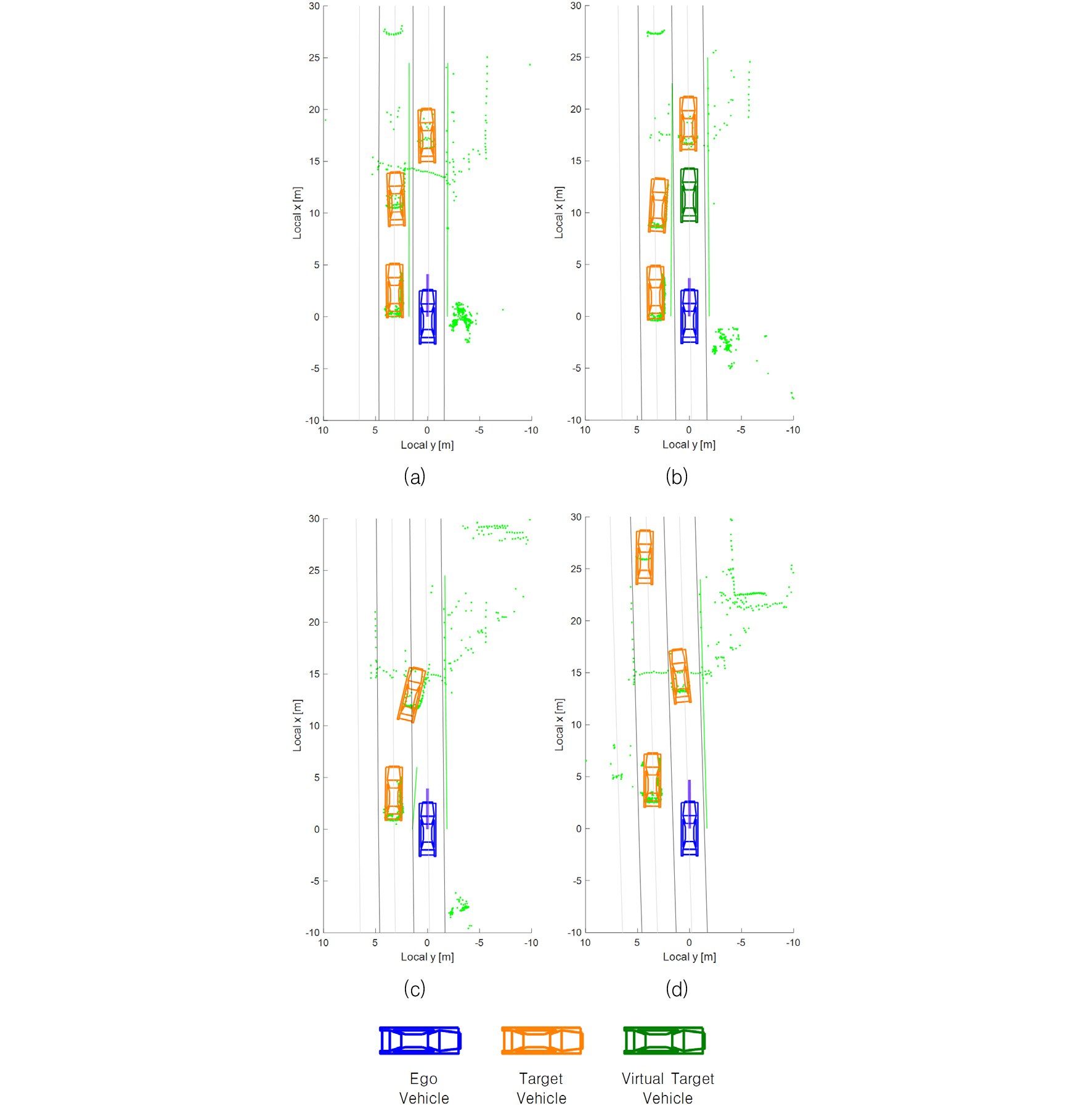
Fig. 2(a)는 측 전방 차량이 차선 변경을 시작하기 전 모든 차량이 차선 차간 거리 유지 주행을 하는 상황을 나타낸다. 이후 Fig. 2(b)와 같이 측 전방 차량이 방향 지시등을 점등하여 자 차량이 차선 변경 의도를 파악하고 양보 거동을 수행한다. 방향 지시등 점등 후 생성된 virtual target vehicle은 주변 차량 인지 결과와 함께 도시하였다.
안전 거리가 확보되면 cut in 차량은 Fig. 2(c)와 같이 차선 변경을 수행하여 두 차선 사이를 가로질러 주행한다. 차선 변경이 종료되어 완전히 주행 차선 내에 진입하면 자 차량은 cut in을 완료한 차량을 타겟 차량으로 하여 Fig. 2(d)와 같이 차간 거리 유지 기능을 수행한다. 양보 과정에서 상대 차량의 방향 지시등 상태에 따른virtual target 생성 여부와 자 차량의 종 방향 속도를 시간에 따라 나타낸 결과는 Fig. 3과 같다.
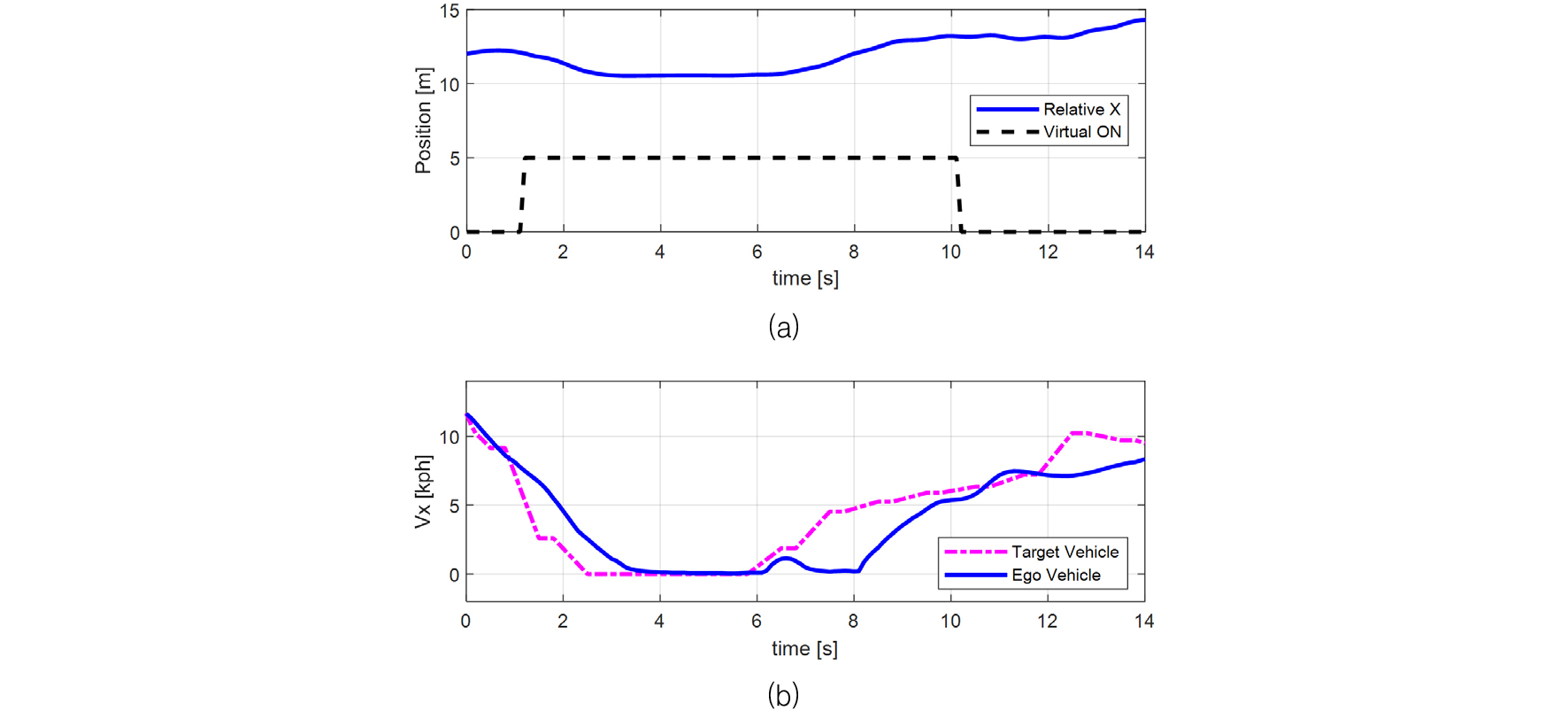
차선 변경 의도를 파악한 자 차량은 1~2초 시점에서 감속을 진행하고 정지한다. Target 차량은 정지 상태를 유지한 다음 6초 이후부터 가속하여 주행한다. 반면 ego vehicle은 virtual target및 주행 차선으로 넘어온 cut in 차량과의 충분한 안전 거리를 확보할 때까지 약 2초간 더 정지 및 저속 주행 상태를 유지한다. 이후 전방 추종 대상 차량이 cut in을 수행한 차량으로 바뀌고 안전거리가 확보되면 자 차량은 다시 가속하여 차선 차간 거리 유지 주행을 시작한다.
6. 결 론
본 연구에서는 차선 변경 의도를 가진 측 전방 차량에 대응하기 위한 V2V 통신 기반 양보 거동 계획 알고리즘을 소개하였고, 실험을 통해 자율주행 차량이 안전하게 목표 종 방향 거동을 추종함을 확인하였다. 실제 자율주행 차량 및 주변 일반 차량으로 구성된 실험을 통해 V2V통신을 이용하는 경우 차량 간 거리가 좁은 혼잡 교통류 주행 상황에서 측 차선 차량이 주행 차선을 침범하기 전에 차선 변경 의도를 수신하고 정차 상태를 유지할 수 있음을 확인하였다.
환경 센서와 더불어 차량 간 통신이 활성화될 경우 차선변경뿐만 아니라 분기/합류로 및 교차로 주행에 있어서도 보다 효율적이고 안전한 자율주행 기능 구현이 가능할 것으로 생각된다. 후속 연구 계획으로 가상 타겟 생성 알고리즘의 고도화 및 추가 실험을 진행할 예정이다. 자 차량과 인접한 종 방향 위치에서 측 차선 차량이 차선 변경을 시도하는 경우 급격한 감속을 방지하도록 탑승자의 승차감을 고려하여 타겟 위치를 능동적으로 생성하는 것을 목표로 한다.
