

1. 서 론
2. MIL 기반 C-ITS 서비스 모델링
2.1. 도심도로 자율협력주행 서비스 시나리오 정의
2.2. C-ITS 서비스 구현을 위한 V2X 신호 식별
3. V2X 모델링 및 C-ITS 서비스 시뮬레이션
3.1. MIL 기반 V2X 모델 구성
3.2. V2X 기반 C-ITS 서비스 시뮬레이션
4. 결 론
1. 서 론
오늘날 자동차 산업에서 자율주행 기술의 중요성은 점점 더 증대되고 있으며 자율주행 기술의 도입을 통해 도로 안전 및 사용 편의, 에너지 효율의 향상 등의 이점이 기대되고 있다.(1) 자율주행 기술의 도입을 위한 중요한 과제는 복잡하고 다양한 시나리오와 환경 조건에서 기능을 검증하고 안전성을 입증하는 것이다. 실제 자율주행차가 사람보다 안전하다는 것을 입증하기 위해서는 천문학적인 거리를 주행해야 하며,(2) 이는 시간과 비용 측면에서 현실적으로 불가능하다. 이로 인해 가상 검증(Virtual Testing)은 첨단운전자지원시스템(Advanced Driver Assistance System, ADAS) 및 자율주행시스템(Automated Driving System, ADS) 기능의 연구 및 개발에서 필수적인 주제로 다뤄지고 있다. 그러나 자율주행 기능이 어떻게 효율적인 방법으로 검증할 수 있는지 여전히 불분명하다. 이를 위해 시뮬레이션 기반 검증과 같은 테스트 방법 수립을 목적으로 PEGASUS 프로젝트가 수행되었다.(3) PEGASUS 프로젝트를 통해 고속도로 환경에서 레벨 3 자율주행의 안전성 평가를 위한 기반을 다지고, 이후 2022년 현재에는 패밀리 프로젝트인 VVM(Verification & Validation Methods) 프로젝트를 수행 중이며, 이를 통해 도심지 Lv.4 이상의 자율주행 안전성 평가를 위한 연구가 진행되고 있다.(4)
가상 검증 방법으로는 “Table 1”과 같이 MIL(Model in the Loop), HIL(Hardware in the Loop), VIL(Vehicle in the Loop)과 같은 시뮬레이션 기반의 검증 환경이 활용되고 있으며, 반면에 실차 기반의 검증 방법으로는 Proving Ground, Real World Test와 같은 환경에서 검증이 수행되고 있다. 각각의 환경이 갖는 실행 속도와 비용, 시나리오 제약, 재현성, 충실도 수준(Level of fidelity)에 대한 고유한 강점과 약점으로 인해 제조업체에서는 전체 시스템의 개발 및 안전성을 보장하기 위해 한 가지 환경이 아닌 다양한 환경을 활용하고 있다. 일반적으로 시스템의 성능에 대한 기본적인 검증을 목적으로 광범위한 시나리오를 다루는 경우 MIL, HIL과 같이 상대적으로 낮은 충실도(Lower fidelity)를 갖는 환경이 사용되고 있으며,(5,6) 이후 구체적인 시나리오에서 시스템의 성능을 검증하기 위한 목적으로 VIL, Proving Ground, Real World와 같은 충실도가 높은 환경이 사용되고 있다.(7)
Table 1.
Test environments for automotive system
기존 ADAS 시스템과 달리 시스템이 운전의 주체가 되는 ADS 기능의 검증을 위해서는 높은 충실도와 함께 다양한 시나리오에 대한 검증이 요구된다. 이를 위해서는 구현 가능한 시나리오의 자유도가 높고 반복적인 검증이 가능한 MIL 또는 HIL 시뮬레이션 환경에서 많은 검증이 수행되어야 한다.
이와 같은 시뮬레이션 환경에서 ADS의 기능 검증을 위해서는 대상 시스템을 제외한 차량 및 센서, 주행 환경 등 모든 환경이 가상의 요소들로 충실하게 구성되어야 한다. 이 중에서도 특히 도심을 대상으로 하는 레벨 4 이상의 도심 협력형 자율주행 기능의 개발 및 검증을 위해서는 C-ITS(Cooperative Intelligent Transport Systems)가 필수적으로 요구된다. C-ITS란 주변 교통상황과 급정거, 낙하물 등의 사고 위험 정보를 실시간으로 제공하는 시스템으로 V2X(Vehicle to Everything) 서비스를 기반으로 차량의 장착된 센서의 감지 범위 밖의 정보, 센서로 감지가 어려운 상황에서도 위험 정보를 제공하여 안전성을 향상한다.(8)
C-ITS 서비스 연계 시뮬레이션 관련 연구로는 노변 기지국(Road Side Unit, RSU)과 차량의 V2X 단말기(On Board Unit, OBU)를 포함하는 HIL 기반 시뮬레이션 테스트 프레임워크를 구축하여 대표적인 자율주행 어플리케이션에 대한 기능 검증을 통해 실도로 기반 검증의 한계를 보완하기 위한 시뮬레이션 환경이 연구되고 있으며,(9~12) MIL 시뮬레이션 환경에서는 패킷 손실 확률 및 패킷 전송 지연과 같은 무선 채널의 특성을 모델링하기 위한 방법이 주로 연구되고 있다.(13) 또한, 다중 차량 시뮬레이션 환경에서 차량 간의 센서 정보 및 주행 상태를 공유하기 위한 V2X 시뮬레이션 프레임워크 및 시뮬레이션 플랫폼이 제안되었고,(14,15) 자율주행에서 다중 에이전트의 협업을 통한 인지 성능 개선을 목적으로 V2X의 데이터 세트의 부족을 보완하기 위한 시뮬레이션 기반의 다중 에이전트 인식 데이터 생성 환경이 소개되었다.(16)
이와 같이 기존 연구에서는 가상 환경과 V2X 단말기를 통합하는 형태의 HIL 시뮬레이션 환경을 구성을 통해 무선 채널을 통해 V2X 통신 메시지를 인터페이스하여 C-ITS 기반 자율협력주행 환경이 구성되고 있으나 MIL 시뮬레이션 환경에서 ITS 서비스와 연계하기 위해서는 방대한 양의 V2X 통신 메시지를 효과적으로 구성하기 위한 방법론이 필요한 실정이다. 이에 본 논문에서는 MIL 시뮬레이션 환경에서 레벨 4 자율주행 기능의 안전성 검증을 목적으로 V2X 기반 C-ITS 서비스 모델링 절차 및 방법을 다루고자 하며, 본 논문에서 제시되는 주요 내용은 다음과 같다.
- MIL 시뮬레이션 환경의 제약을 고려한 C-ITS 서비스 시나리오의 구현 방안
- C-ITS 서비스 연계 자율협력주행 시뮬레이션을 위한 주요 V2X 신호 정보 모델링 방법
먼저, 2장에서는 C-ITS 기반의 주요 자율협력주행 서비스 검토를 통해 모델링 대상 시나리오가 정의되며, 3장에서는 대상 서비스 모델링을 위한 주요 메시지 정보가 분석된다. 4장에서는 MIL 시뮬레이션 환경에서 앞서 정의된 서비스 시나리오를 구성하여 자율주행 기능과 연계한 검증 결과가 제시된다.
2. MIL 기반 C-ITS 서비스 모델링
본 장에서는 MIL 시뮬레이션 환경에서 C-ITS 서비스 모델링을 위한 절차 및 방법에 대해 다룬다. 그 절차로써 먼저, 주요 도심도로 자율협력주행 서비스 및 유즈케이스를 분석하여 MIL 시뮬레이션 환경에서 구현 가능한 대상 시나리오가 선정된다. 선정 기준으로는 시뮬레이션 환경에서 서비스 구현 가능성을 고려하기 위해 서비스가 포함하는 자율주행 차량의 수를 주요 기준으로 고려하였다. 다음으로 선정된 대상 서비스 시나리오를 시뮬레이션 환경에서 효과적으로 구현하기 위해 SAE J2735 표준 메시지를 바탕으로 필수적인 신호가 식별된다.(17)
2.1. 도심도로 자율협력주행 서비스 시나리오 정의
도심 도로에는 교차로, 노상 주차, 중앙 분리대, 보도 등의 시설이 설치되어 있으며, 한정된 공간에 자동차, 보행자, 자전거 이용자 등 다양한 도로 이용자가 존재하고 있어 복잡하고 다양한 교통환경을 지닌다.
이러한 도심 도로에서 자율주행을 지원하기 위한 목적으로 국토교통부 지원으로 수행된 “도심도로 자율협력주행을 위한 서비스 개발 및 실증 기술 개발” 연구과제가 수행되었다.(18) 해당 연구를 통해 도출된 도심 도로 자율협력주행을 위한 서비스 및 유즈케이스는 Table 2와 같다.
Table 2.
Service application and use-case list
먼저, 안전 주행 지원 서비스는 V2X 통신을 통해 주변 도로교통 상황을 종합적으로 인지하고, 주변 교통류와 상호교류하며 교통류 흐름에 맞춰 추정함으로써 안전성, 주행 쾌적성, 도로 가용성을 극대화하는 서비스이며, 차로 변경 지원 서비스는 V2X 통신을 통해 변경하고자 하는 차로의 차간 간격을 인지하거나, 차량 간 협상 및 관제센터로부터 배정받은 주행 우선권에 따라 안전하게 합류 또는 끼어들기를 수행함으로써 사고 및 정체를 예방하는 서비스이다. 교차로 통행 지원 서비스는 V2X 통신을 통해 전방의 신호 정보 및 통행 우선권 정보로부터 차량의 속도를 제어함으로써 안전한 교차로 통행을 지원하는 서비스이며, 상충 회피 서비스는 인프라 및 주변 차량으로부터 전방의 돌발 상황 및 사각지대의 보행자 등과 같은 교통약자 정보로부터 상충을 예방하는 서비스이고, 긴급차량 주행 경로 확보 서비스는 긴급차량 접근 시 주행차로 내 차량의 위치 이동(편향 주행)을 통해 긴급차량의 주행 경로를 확보하는 서비스이다. Fig. 1은 서비스 유즈케이스의 예시를 보여준다.

위와 같이 정의된 도심 자율협력주행 서비스는 협력 대상에 따라 자율주행차와 일반차, 자율주행차량 간의 협력, 자율주행차와 교통 인프라 등으로 구분될 수 있다. 이와 같은 서비스 개발 및 검증을 위해서는 시뮬레이션 환경에서 자율협력주행 기능을 갖는 다수의 차량과 일반차량이 구현되어야 하지만 본 논문에서 활용하는 시뮬레이션 환경은 대상 차량 이외의 주변 차량에 자율협력주행 기능구현에 제약이 있어 이러한 측면이 고려되어야 한다. 이에 본 논문에서는 ITS 서비스 모델링을 위한 대상 시나리오 선정에 있어 다수의 자율주행차량 간의 협상이 요구되는 서비스를 제외하고, 노변 기지국(Road Side Unit, RSU)에서 차량의 V2X 단말기인(On Board Unit, OBU)로 전방 공사구간 정보를 제공하는 A2, 신호 교차로의 현재 신호 정보 및 주기 정보를 차량에 제공하는 C1, 고장차 등 정보 제공을 위한 D1, 긴급차량의 정보 제공을 위한 E1을 대상 서비스로 선정하였다.
2.2. C-ITS 서비스 구현을 위한 V2X 신호 식별
선정된 서비스 유즈케이스를 MIL 시뮬레이션 환경에서 모델링하기 위해 SAE J2735의 V2X 표준 메시지 검토되었고,(13)Table 3은 메시지 셋을 나타낸다.
Table 3.
V2X communication message sets (SAE J2735)
표준 메시지 셋은 관련된 정보를 제공하기 위한 세부적인 데이터 프레임을 포함한다. Table 4는 TIM 메시지 셋의 데이터 프레임을 구성을 보여준다.
Table 4.
Data frame of V2X message (TIM)
본 논문에서는 C-ITS 서비스 모델링을 목적으로 V2X 관련 표준 메시지 셋에 정의된 데이터 프레임의 정보로부터 시뮬레이션 환경에서 선정한 서비스 유즈케이스를 효과적으로 구성하기 위해 먼저, 대상 서비스의 유형을 구분하고 이후 서비스 유형에 따라 서비스 구현을 위해 필수적인 신호들의 그룹을 구성하여 효과적으로 시뮬레이션 환경에 구현하였다. 서비스 유형은 정적 이벤트, 동적 이벤트, 교통신호 이벤트의 3가지 유형으로 구분하였다. 정적 이벤트는 공사 구간과 같이 도로 상에서 발생되는 정적인 이벤트 정보를 제공하기 위함으로 대상 서비스 중 A2가 해당된다. 동적 이벤트는 도상 상의 동적 객체로부터 발생하는 이벤트 정보를 제공하며, D1과 E1이 해당된다. 교통신호 이벤트는 현재의 신호 상태 및 주기를 제공하는 것으로 C1에 해당된다. 시뮬레이션 환경에서 위와 같이 분류된 C-ITS 서비스에 대한 정보를 효과적으로 전달하기 위해 구성된 신호 정보 그룹은 Table 5와 같이 정의되었다.
Table 5.
Defined event signals for C-ITS
동적 이벤트를 위한 신호 정보로는 객체의 ID 및 위치, 속도와 같은 상태 정보와 함께 주행 도로 및 차선 정보, 고장 등의 상태 정보와 통행 우선권의 정보를 포함하며 이와 같은 신호 구성을 통해 본 논문에서는 고장 상태와 위치, 점유 차선 등의 정보를 구성하여 D1 상황에 대한 정보를 제공하며, 해당 신호를 긴급차량으로 설정하여 긴급차량의 접근에 대한 정보를 제공한다. 정적 이벤트 신호의 경우, 이벤트 유형과 함께 위치 정보, 이벤트 구간의 길이와 해당 차선 정보로 구성되며 이와 같은 구성을 통해 공사 구간에 대한 서비스인 A2 환경이 정의된다. 교통신호 이벤트를 위한 신호 그룹은 교차로 ID 및 교차로 위치, 신호기 ID 및 신호 상태와 주기 시간 정보로 구성되었다. 이와 같은 정보를 통해 전방 교통신호 상태와 주기 정보를 제공하기 위한 환경이 구성된다.
3. V2X 모델링 및 C-ITS 서비스 시뮬레이션
3.1. MIL 기반 V2X 모델 구성
앞 장에서 정의된 서비스 구현을 위한 신호 정보 모델링을 위한 가상 환경으로는 dSPACE 社의 ASM(Automotive Simulation Model)을 활용하였다. 가상 도로 및 주변 차량, 신호등과 같은 교통환경 구현이 가능하며, Simulink 기반으로 구성된 차량 동역학 모델을 활용하여 대상 차량은 제어 로직 및 가상 센서와 연계한 통합 시뮬레이션이 가능하다. 본 논문에서는 V2X 모델링을 위해 시뮬레이션 환경에서 공사 구간과 긴급차량, 교통신호 정보가 구성되었으며 구성된 객체의 타입에 따라 정의된 위치 및 상태 등과 같은 속성 정보는 차량 동역학 모델을 기반으로 구성된 자율협력주행 로직과 인터페이스된다. 구성된 자율협력주행 로직은 전방 레이더 및 카메라 센서 모델와 측/후방 객체 감지용 센서 모델을 통해 감지한 객체 정보를 바탕으로 차선 유지 및 차간 거리 제어와 속도 제어가 수행되며, 차량 동역학 모델과 통합되어 수신된 가상의 V2X 신호 정보를 통해 C-ITS 서비스 기반 주행이 수행된다. Fig. 2는 구성된 시뮬레이션 요소를 간단히 보여준다.

이와 같은 시뮬레이션 환경에서 Table 5에 정의된 이벤트 신호를 구현하기 위해 도로 및 주변 오브젝트, 신호등과 같은 모델의 시뮬레이션 위치, 형태, 상태 등의 속성 정보가 활용되었다. 한가지 예로써 Fig. 3은 교차로 신호기에 대한 속성 정보와 함께 신호 상태 및 주기 설정 환경을 보여준다.

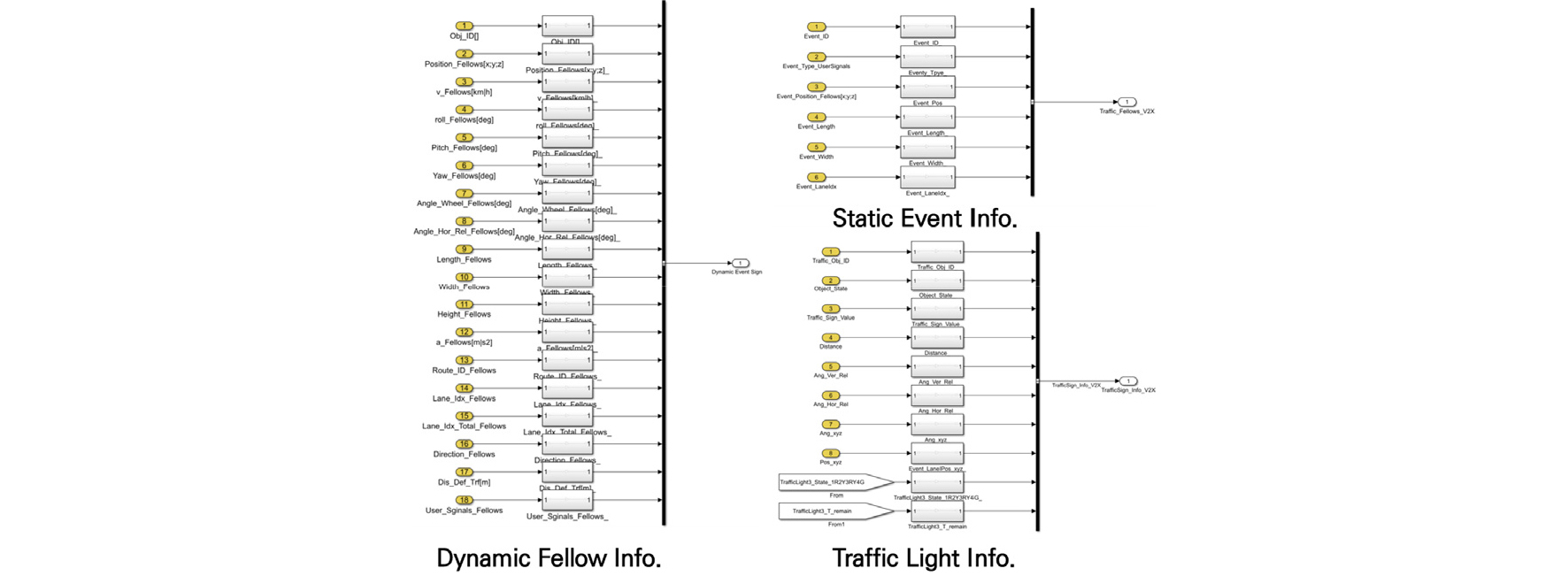
이벤트 메시지 구성을 위해 식별된 교통 인프라 및 객체 정보들은 Simulink 환경에서 정의된 이벤트 형태에 맞게 Fig. 4와 같이 모델로 구성되었다.
3.2. V2X 기반 C-ITS 서비스 시뮬레이션
MIL 시뮬레이션 환경에서 구현된 V2X 메시지 생성 모델은 2장에서 선정된 C-ITS 유즈케이스 상황을 대상으로 검증된다. 구현된 모델로부터 V2X 정보를 수신한 대상 차량은 속도 및 조향 제어기를 활용하여 위험 상황이나 도로 정보를 기반으로 위험 상황 또는 안전 관련 정보로부터 적절한 대응이 가능하도록 구성하였다.
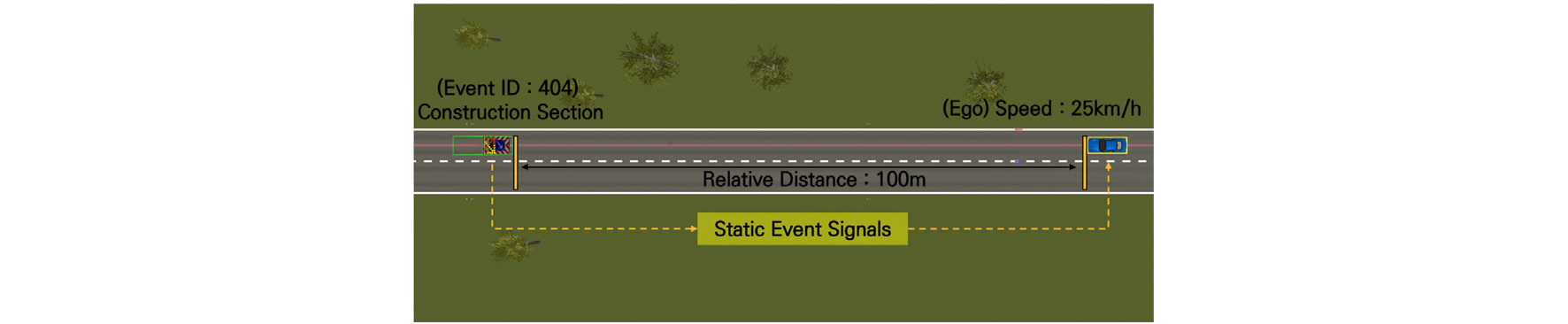
먼저, 전방 공사구간에 대한 정보를 제공하는 A2 유즈케이스에 대한 시나리오로는 대상 차량이 25 km/h의 속도로 주행하고 동일 차선의 공사구간 정보를 약 100 m를 남겨두고 전송받는 상황으로 이때, 카메라 및 레이더 센서는 비정형 객체인 공사구간을 감지하지 못함을 가정하였고 Fig. 5는 구성된 환경을 보여준다.
A2 상황에서 구현된 정적 이벤트 메시지를 통해 공사정보를 수신한 차량의 거동은 Fig. 6과 같다.
Fig. 6(a)와 (b)는 각각 대상 차량의 주행 경로와 요레이트와 공사구간까지의 종방향 상대 거리를 나타낸다. 대상 차량은 정의된 정적 이벤트 메시지를 통해 사전에 공사구간 도달 전 100 m에서 정의된 공사구간의 ID인 404와 함께 위치 정보를 수신한다. 대상 차량은 공사구간 정보를 수신하여 인접 차선으로 차선을 변경한 결과를 주행 경로를 통해 확인할 수 있다.

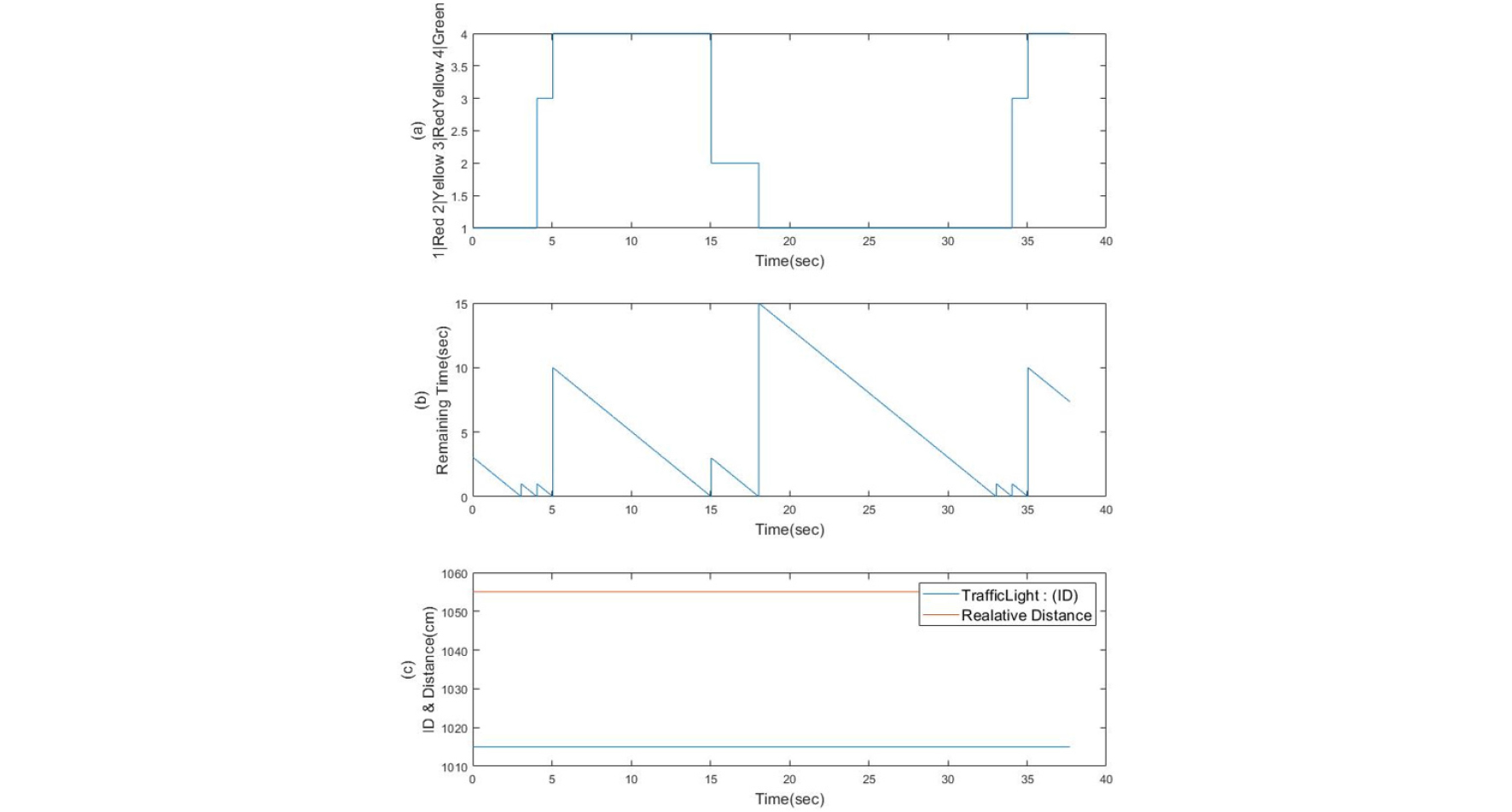
다음으로는 교통신호 정보를 제공하기 위한 C1 상황으로 Fig. 7과 같이 전방 신호 교차로까지 약 10.5 m 정도의 거리를 두고 대상 차량이 정차하고 있는 상황으로 이때, 대상 차량이 정의된 교통신호 정보 메시지로부터 수신한 주요 교통신호 정보는 Fig. 8과 같다.
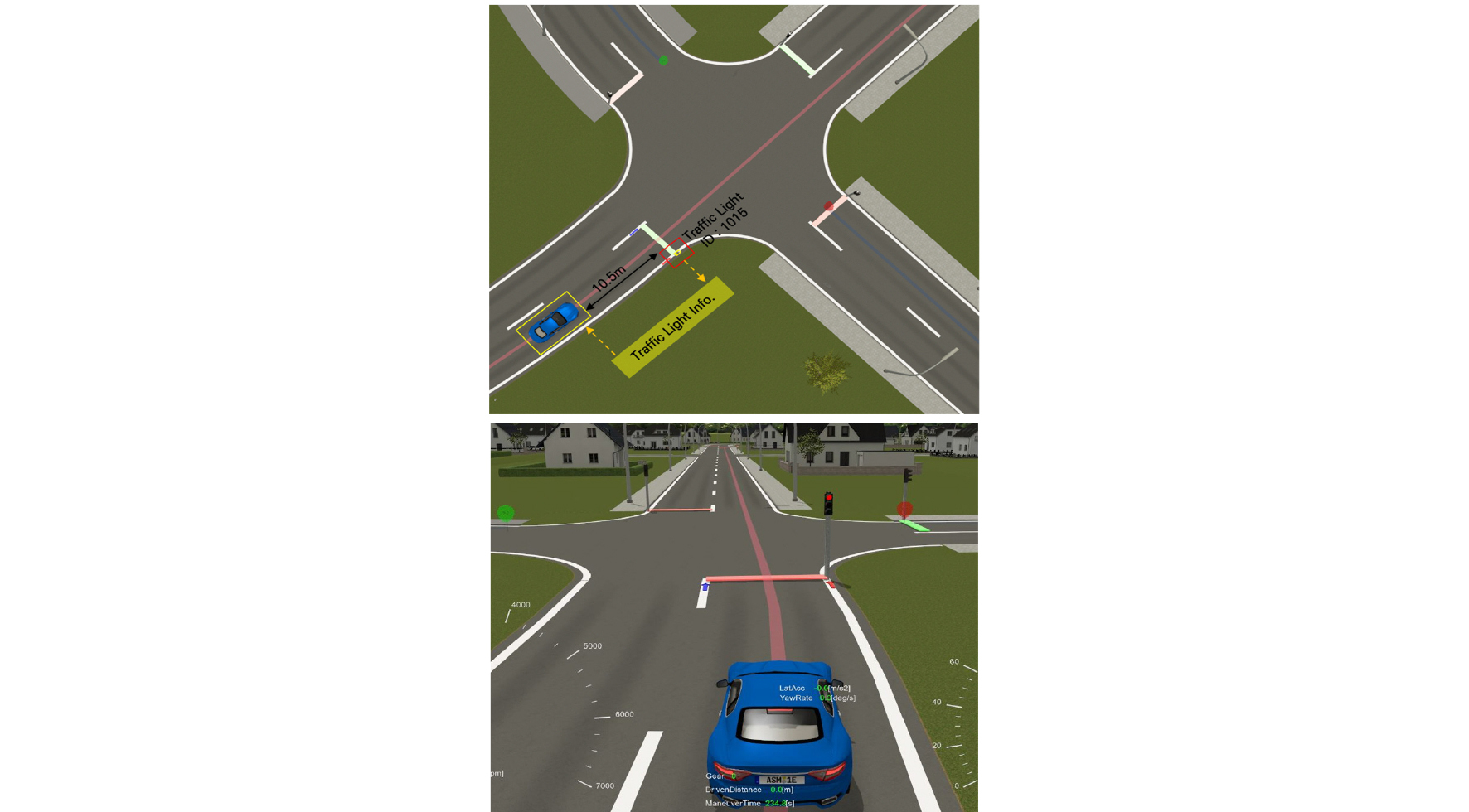
Fig. 8의 (a)와 (b)는 각각 현재 교통신호의 상태 정보(적색, 녹색 등)와 다음 상태로 교통신호가 전환되기까지의 남은 시간을 나타낸다. Fig. 8의 (c)는 전방 신호등의 ID와 신호기까지의 상대거리를 나타낸다. 수신된 정보로부터 전방 신호등은 대상 차량으로부터 약 10.5 m(1,055 cm)에 위치하며, ID는 1015로 Fig. 3에서 정의한 정보가 정상적으로 전송됨을 알 수 있다. 또한, Fig. 8의 (a), (b)를 통해 해당 신호기의 정의된 신호 패턴에 따라 현재 신호 상태와 남은 시간이 수신됨을 알 수 있다.
마지막으로 동적 이벤트 정보 제공을 위한 E1 상황으로 Fig. 9와 같이 정차 중인 대상 차량의 전방 약 30 m에서 10 km/h의 속도로 긴급차량이 주행 중인 상황으로 긴급차량으로부터 수신된 주요 동적 이벤트 정보는 Fig. 10과 같다.

Fig. 10의 (a), (b)는 각각 긴급차량의 ID 및 속도, 주행 차선의 인덱스와 대상 차량과의 상대 거리를 나타낸다. 수신된 정보로부터 긴급차량의 ID는 119이며, 대상 차량과 동일한 차선을 나타내는 차선 인데스 0에서 10 km/h로 주행 중이며, 정차 중인 대상 차량과의 상대 거리는 긴급차량의 일정 속도로 주행함에 따라 최초 30 m에서 점차 증가되는 것을 알 수 있다. 이와 같은 3가지 이벤트 메시지를 통해 효과적으로 구현된 대표적인 V2X 기반의 ITS 유즈케이스에 대한 검증을 통해 구현된 V2X 모델에 대한 유효성을 검증할 수 있었다.

4. 결 론
본 논문에서는 MIL 시뮬레이션 환경에서 도심 자율주행 기능의 검증을 목적으로 C-ITS 지원을 위한 V2X 모델링에 관한 연구가 수행되었다. 현재 MIL 시뮬레이션 환경에서 C-ITS 서비스를 검증하기 위한 V2X 모델링에 대한 방법론이 명확하지 않은 상황에서 효과적인 모델링 방안을 고안하기 위한 연구가 수행되었다. 그 방법으로써 주요 도심 자율협력주행 서비스 유즈케이스를 분석하여 구현 가능한 대상 시나리오를 선정하였으며, 표준 메시지에 대한 검토를 통해 효과적으로 대상 서비스를 구현하기 위한 서비스 유형 분류 및 주요 메시지를 정의하였다. 정의된 메시지는 MIL 시뮬레이션 환경에서 구현되어 대상 차량을 기준으로 C-ITS 서비스 유즈케이스를 시뮬레이션하여 유효한 결과를 확인하였다. 다수의 자율협력주행 기능을 구현하기 어려운 환경적인 제약으로 인해 제한적인 시나리오를 대상으로 선정하였고, 현재 시뮬레이션 환경에서 실제 통신 환경의 지연이나 오차와 같은 특성을 정밀하게 반영하기에는 한계가 있었으나 본 논문에서 제안한 모델링 방법을 통해 시뮬레이션 환경에서 자율협력주행과 관련된 기능 개발 및 검증에 효과적으로 적용할 수 있을 것으로 생각된다. 향후 연구에서는 V2X 환경의 오차 및 지연과 같은 특성이 고려된 현실적인 시뮬레이션 환경을 구축하고자 한다.
