

기호설명
1. 서 론
2. 경로 추종 모델
2.1. 차량 동적 특성
2.2. 횡 방향 거동 및 제어 알고리즘
3. 충격 응답 방식 차선 변경
3.1. 충격 응답 곡선
3.2. Gain에 따른 차선 변경 거동 특성
4. 차선 변경 시뮬레이션
4.1. 시뮬레이션 설계
4.2. 시뮬레이션 결과
5. 결 론
기호설명
vx : 차량의 종방향 속도(m/s)
δ : 전륜 조향각(rad)
L : 축간 거리(m)
γ : 무게중심에 대한 회전 각속도(rad/s)
ey : 횡 방향 오차(m)
eψ : 방위각 오차(rad)
ξ : 횡 방향 오차의 적분 항(m·s)
ψ : 절대 좌표에 대한 차량의 방위각(rad)
ψr : 절대 좌표에 대한 경로의 방위각(rad)
ay,limit : 한계 횡 가속도(m/s2)
Wd : 차로 폭(m)
w : 도로 곡률(m-1)
R : 도로 곡률반경(m)
g : 중력 가속도(m/s2)
c : 최대 횡 가속도 인자(-)
λ : 감쇠 상수(-)
1. 서 론
자율주행차의 알고리즘은 일반적으로 인지, 측위, 판단, 제어 단계로 구분된다. 자율주행 차량은 레이다, 라이다와 카메라 같은 환경센서로 주변 정보를 수집하고 GPS로 자차량의 위치를 파악하여 인지와 측위 알고리즘을 수행한다. 판단 알고리즘은 인지와 측위 정보를 이용하여 최적 경로와 거동을 계획한다. 목표 경로를 추종하기 위해 제어 알고리즘에서 목표 조향과 구동 및 제동 제어 입력이 계산된다.
수동주행에서 운전자는 자신이 가하는 제어 입력이 차량의 거동 안정성과 승차감에 직접적인 영향을 준다는 것을 경험적으로 알고 있다. 거동 안정성과 승차감의 향상을 위해 운전자는 가감속 및 조향 입력을 최소화하여 종방향 및 횡방향 가속도를 줄이고자 한다. 따라서 자율주행 자동차의 안정성과 탑승객의 승차감을 위해 자율주행 알고리즘에서 계산된 목표 경로와 제어 입력은 종/횡 가속도를 최소화하려는 수동주행 특성을 모방해야 한다.
차량의 종 방향 속도가 크게 변하지 않는 환경에서는 횡 방향 가속도가 승차감에 큰 영향을 준다. 승차감 개선을 위해 횡 방향 가속도를 제한하는 조향 입력은 제어 알고리즘에서 계산한 최적의 입력과 상이하여 경로 추종 성능을 저하시킨다. 따라서 곡선 선회나 긴급회피 주행에서는 조향 입력의 제한이 위험하다. 하지만 차선 변경과 같이 차량의 방위각이 크게 변하지 않는 주행에서는 횡 가속도와 조향 입력의 제한이 추종 제어 성능을 저하시키지 않으면서 승차감 향상에 기여한다.
Feng You 등은 간단한 다항식 형태의 차량의 차선 변경 궤적을 제안하였다.(1) Adeel Mehmood 등은 5차 다항식의 차선 변경 궤적을 PID 제어하는 기술과 더불어 충돌 방지 기술을 제시하였다.(2) Da Yang 등은 동적 차선 변경 계획 알고리즘을 제안하였다.(3) Lukun Wang 등은 3차 다항식 형태로 스플라인 보간된 곡선도로에서 차선 변경 궤적을 추종하는 기구학적, 동역학적 슬라이딩 모드 제어 시스템을 구성하였다.(4)
본 연구의 제어 알고리즘은 횡/각오차에 대한 상태 확장 되먹임 제어기를 제안한다. 전체 되먹임 시스템의 특성방정식은 횡 방향 오차에 대한 3차 미분 방정식의 형태이며 음의 삼중근을 극점으로 가져 안정성을 가진다. 횡 방향 오차가 초기조건을 가질 때 이 시스템의 충격응답 곡선이 차선 변경 경로와 유사함을 발견하였다. 차량의 차선 변경 거동을 조향 입력이 제한된 충격응답 형태로 제어하는 로직을 제안하였다.
2. 경로 추종 모델
Fig. 1은 경로 추종 모델 시뮬레이션의 개략도이다. 자율주행 모델에서 경로 추종 부분만 구현했기에 인지와 판단 단계가 생략되어 있다.
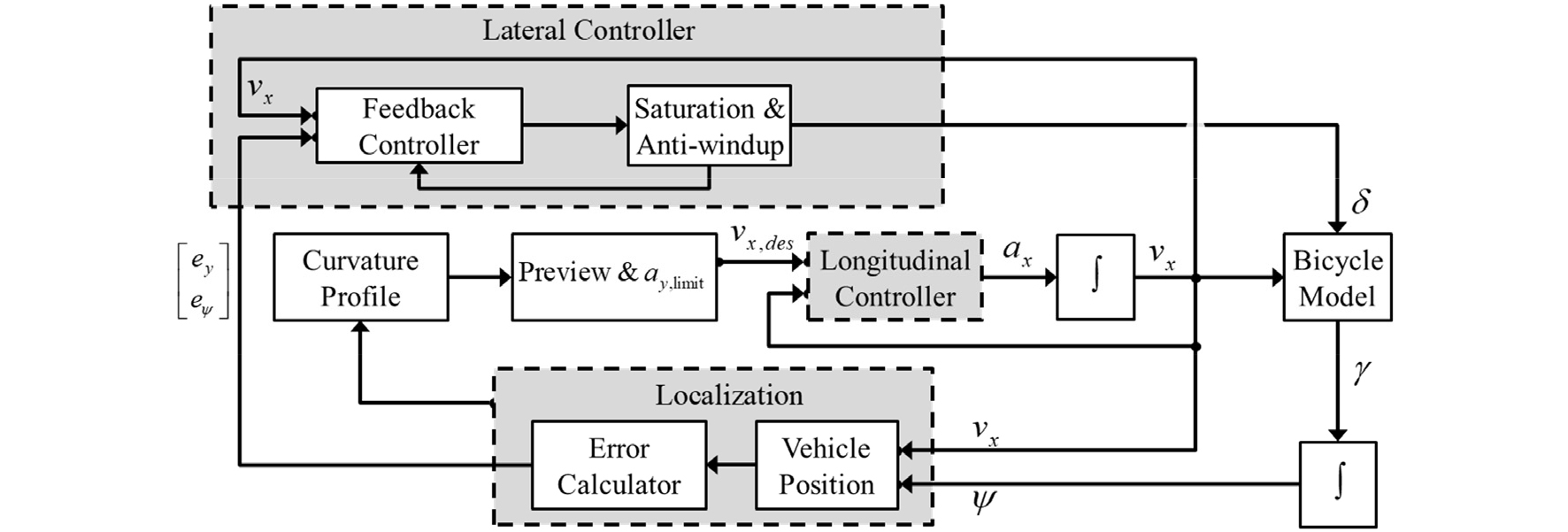
측위 단계에서는 차량의 위치로부터 목표 경로와 가장 가까운 점을 계산한다. 해당 점 주변의 목표 경로의 좌표들을 2차 곡선으로 피팅하고 곡률 프로파일을 계산한다. 차량의 현재 위치와 방위각으로부터 횡 및 방위각 오차를 계산하여 출력한다.
제어 단계는 크게 종 제어부와 횡 제어부로 나뉘어진다. 종 제어부는 측위부에서 계산한 곡률 프로파일을 바탕으로 일정거리 떨어진 전방 도로의 최대 곡률을 계산하고 횡 가속도의 제한을 대응할 수 있는 종 방향 속도를 미리 계산한다. 목표 종 방향 속도를 추종하기 위한 종 가속도를 출력한다. 횡 제어부의 되먹임 제어기는 종 제어부에서 계산한 종 방향 속도를 기반으로 gain을 계산한다. 측위부에서 계산된 횡오차와 각오차로 상태 확장 되먹임 제어를 수행하고 되먹임 전륜 조향각을 출력한다. 횡 가속도의 제한으로 전륜 조향각의 포화가 발생하고 Anti-windup으로 이를 대응한다.
2.1. 차량 동적 특성
2.1.1. 기구학적 자전거 모델
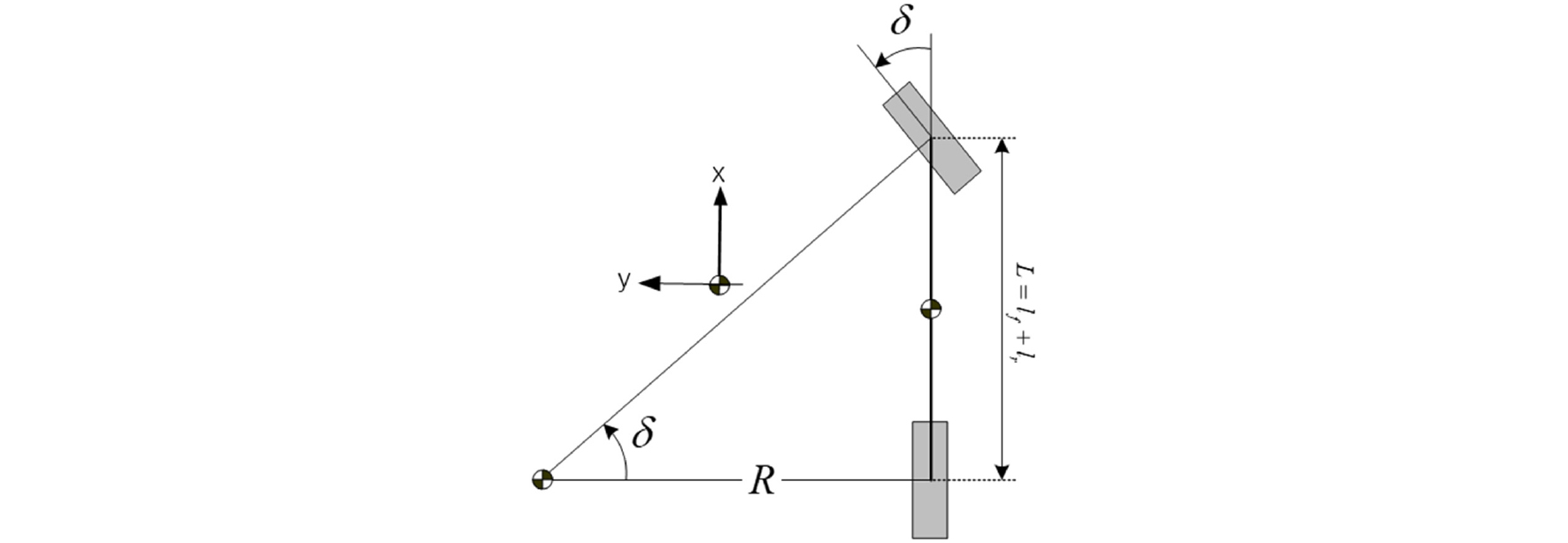
Fig. 2는 자전거 모델의 기구학을 보여준다. 후륜 조향각은 고정이고, 전륜 조향각의 변화에 따라 차량의 회전 곡률과 각속도가 식 (1)과 같이 계산된다.
2.1.2. 오차 동적 특성과 상태 방정식
Fig. 3은 차량의 상태를 목표 경로위의 가장 가까운 한 점에 대하여 횡 방향 오차와 방위각 오차로 표현한 것이다. 각 오차의 시간에 대한 미분은 식 (2), (3)과 같다. 시간에 대한 미분이 ey인 적분 상태 변수 ξ를 정의하면 ey와 관계는 식 (4)과 같다. 식 (2), (3), (4)을 상태 방정식으로 정리하면 식 (5)와 같다.
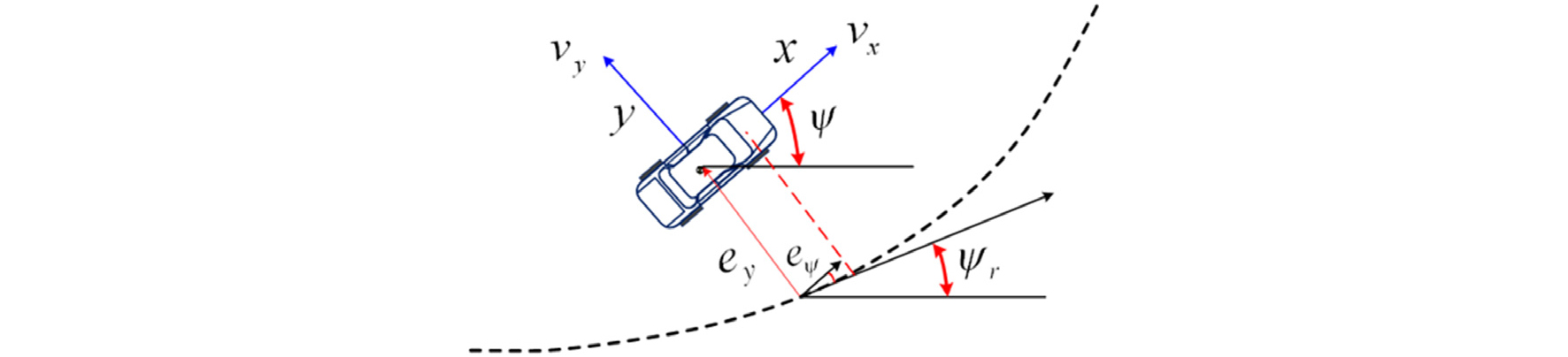
식 (5)의 상태 방정식에서 δ는 조향 입력, w는 도로 곡률이며 외란이다.
2.1.3. 목표 종 방향 속도
측위부는 경로 위의 현재 차량 위치에 대하여 목표경로의 전방 50 m, 후방 20 m 범위에 있는 관심영역의 도로 곡률 프로파일을 출력한다. 종 제어부는 입력 받은 곡률 프로파일에서 최대 곡률 (1/R)max과 그에 해당하는 최대 허용 조향각 δmax을 계산된다. 횡 제어부에서 계산된 조향각이나 최대 허용 조향각이 입력됐을 때, 횡 가속도 한계 ay,limit를 넘지 않는 종 방향 속도를 목표 종 방향 속도 vx,des로 정의한다. 목표 종 방향 속도는 최대 종 방향 속도 vx,max보다 작거나 같고, 이를 정리하면 식 (6)과 같다.
2.1.4. 종 방향 속도 제어
Fig. 4는 종 방향 속도 제어 알고리즘의 개략도이다. 입력 받은 목표 종 방향 속도 현재 속도의 차이에 P gain을 곱해 종 방향 가속도를 출력한다. 식 (7)은 종 방향 P제어기를 나타낸 것이다.

여기서 κ는 gain이다.
2.2. 횡 방향 거동 및 제어 알고리즘
2.2.1. 상태 되먹임 극점 배치
상태 되먹임 제어로 조향 입력을 가하여 식 (5)의 상태 변수들이 목표치인 0에 수렴하도록 제어한다. 상태 변수에 되먹임 행렬 K 곱하여 조향 입력에 대입하고 식 (5)를 정리하면 식 (8)과 같다.
식 (8)이 제어 가능(controllable)하고 식 (8)이 수렴하려면 A-BK이 Hurwitz행렬이어야 한다. 식 (9)는 행렬 A-BK의 특성방정식이 삼중근 s=-λ (λ > 0)를 가지도록 K를 정리한 것이다.
상태변수의 2번째 성분 eψ는 ey의 미분에 비례하는 항이고, 3번째 항 ξ는 ey를 적분한 항이므로 식 (8)의 상태 되먹임 제어는 PID-gain이 vx에 의존하는 PID 제어와도 유사하다.
2.2.2. 상태 방정식의 해와 적분 상태 변수의 초기 조건
식 (8)의 초기조건이 x(0)일 때, 일반해는 식 (10)과 같다. 어떤 자연수 N이 존재하여 n ≥ N이면 ∀t ≥ 0 대하여 도로 곡률의 n계 미분 w(n)(t)이 0이라고 가정한다. 따라서 식 (10)의 적분항을 부분적분으로 풀어 쓰고 가정을 적용하면 식 (11)과 같이 계산된다. 일반해는 식 (12)와 같이 정리된다.
x를 시간에 대해 미분한 상태 변수를 z라고 정의한다. 식 (8)의 양변을 미분한 식 (13)은 새로운 상태 변수 z에 대한 상태 방정식이다. z는 ey, , 을 포함한다. 식 (13)의 해는 식 (12)과 동일한 방식으로 식 (14)와 같이 구해진다. z의 초기 조건은 z(0)이다. 식 (12)의 양변을 미분한 식 (15)가 식 (14)와 동일해야 하므로 식 (16)과 같이 x(0)와 z(0)의 관계가 얻어진다.
w(t)=wc로 일정한 직선(wc=0) 혹은 원형 (wc≠0) 도로에서는 초기 조건 관계식이 식 (17)과 같다.
2.2.3. 횡 가속도 제한과 Anti-windup
Fig. 5는 횡 가속도 제한이 반영된 블록선도이다. 횡 제어부에서 계산된 입력이 조향각의 포화에 의해 오차 적분항이 지속적으로 누적되면 제어성능을 감소시키기 때문에 Anti-windup으로 응답특성을 개선하였다. Anti-windup gain은 k1의 역수로 설정하였다.

중력가속도에 대한 비례상수 c를 이용하여 허용 횡 가속도의 최댓값을 표현했고 식 (6)에 의해 조향각은 식 (18)과 같이 제한된다.
3. 충격 응답 방식 차선 변경
3.1. 충격 응답 곡선
vx가 일정하다고 가정하고 식 (13)으로부터 횡 오차에 대한 3차 미분 방정식을 유도하면 식 (19)와 같다. 초기 횡 오차가 있고 차량 방위각과 평행한 직선도로 경로를 추종하는 상황에 대한 초기 조건과 도로 곡률 조건은 식 (20)과 같다. 식 (20)의 조건 하에 식 (19)를 라플라스 변환하여 정리하면 식 (21)이 된다.
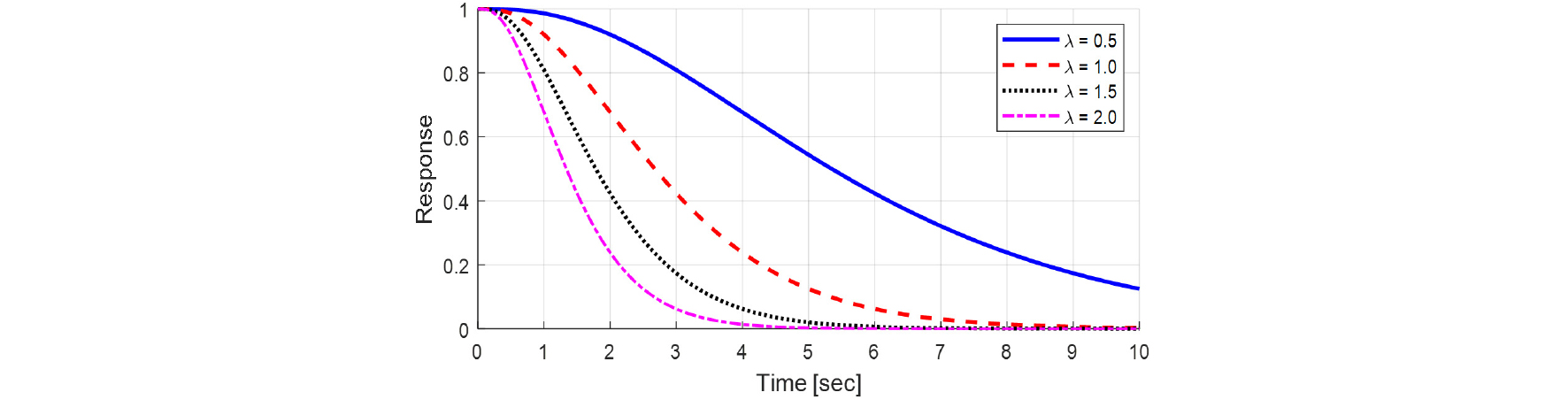
식 (21)을 라플라스 역변환하여 시간영역에 대한 응답을 구하면 식 (22)와 같다. 식 (22)는 전달함수 형태의 식 (21)에 대한 충격 응답이다. 감쇠 상수 λ에 따른 충격 응답 곡선은 Fig. 6과 같다.
식 (20)은 상태 변수 z에 대한 초기 조건이다. Fig. 5의 횡 제어부에 적용하기 위해서는 x에 대한 초기 조건이 필요하고 식 (17)에 의해 식 (23)과 같다.
차선 변경 매 순간을 충격 응답 초기 상황으로 취급하여 x상태 변수에 식 (23)과 같이 차선 변경 직전의 상태 변수 z에 (A-BK)-1를 곱하여 상태 변수 x에 더해주어야 한다.
3.2. Gain에 따른 차선 변경 거동 특성
식 (22)의 충격 응답 곡선은 차량의 차선 변경 거동과 유사하다. ey(0) 만 차로의 폭 Wd로 바꾸면 , 인 조건은 차선 변경 직전에 직선도로에서 이상적으로 직진 주행하는 초기조건과 동일하다. 식 (2)와 같은 가정이 있을 때, 식 (22)의 2계도함수 식 (24)를 횡 가속도로 근사할 수 있다. 최대 가속도는 식 (25)와 같다.
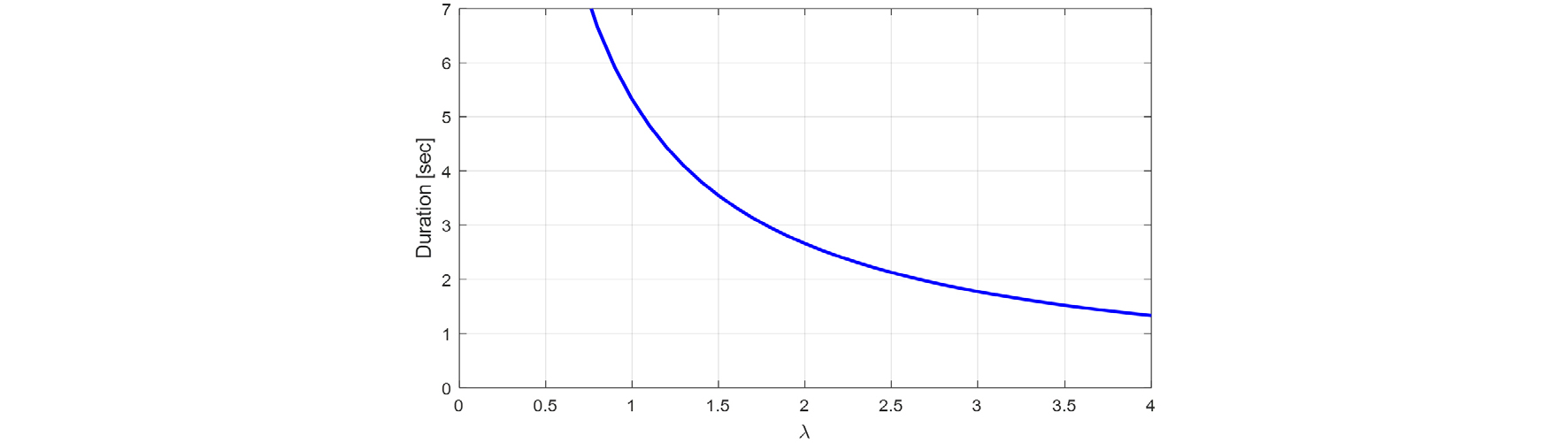
차선 변경의 완료는 횡 방향 오차가 초기 값의 10%에 이르렀을 때로 정의한다. Fig. 7은 감쇠 상수 λ에 따른 차선 변경 완료 시간을 보여준다.
4. 차선 변경 시뮬레이션
4.1. 시뮬레이션 설계
시뮬레이션의 설계 변수와 매개변수는 Table 1과 같다. 최대 횡 가속도 인자 c는 승차감을 고려하여 0.1로 정하였다. 0.2로 여유로운 경우와 제한이 없는 시뮬레이션의 설계 변수와 매개변수는 Table 1과 같다. 최대 횡 가속도 인자 c는 승차감을 고려하여 0.1을 기준으로 정하였다.(5,6) 0.2로 여유로운 경우와 제한이 없는 상황도 설정하였다. 감쇠 상수 λ의 범위는 차선 변경 시간이 3~5.5초의 범위에 있도록 Fig. 7에 의해 1.0 과 1.6 사이로 선택하였다.(7) 직선 도로 50 m를 60 kph로 달려오다가 왼쪽 차선으로 변경하여 200 m의 직선 도로를 주행하는 상황을 구현하였다. 시뮬레이션에서는 왼쪽으로 3.6 m 불연속적으로 분리된 경로이다. Table 2는 각 상황 별 시뮬레이션의 조건들이다. Case [1]에서 횡 가속도에 제한이 없으므로 종 방향 속도는 일정하다.
Table 1.
Design specifications of simulation
Table 2.
Simulation scenarios and conditions
| Case | Maximum Lateral Acceleration Factor c | Longitudinal Velocity vx [kph] |
| [1] | ∞ | 60 |
| [2-1] | 0.1 | 60 |
| [2-2] | 30~60 | |
| [3-1] | 0.2 | 60 |
| [3-2] | 30~60 |
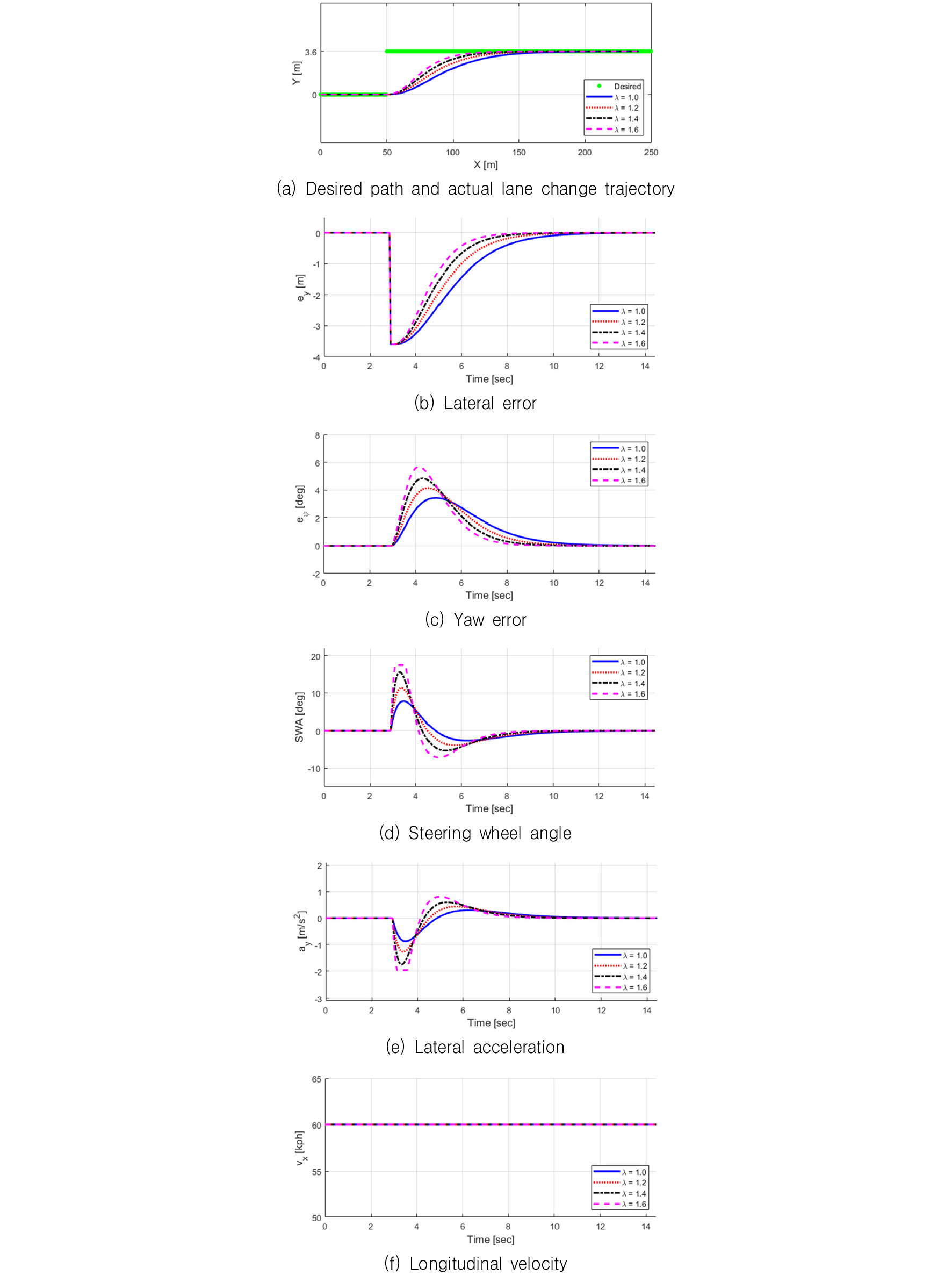
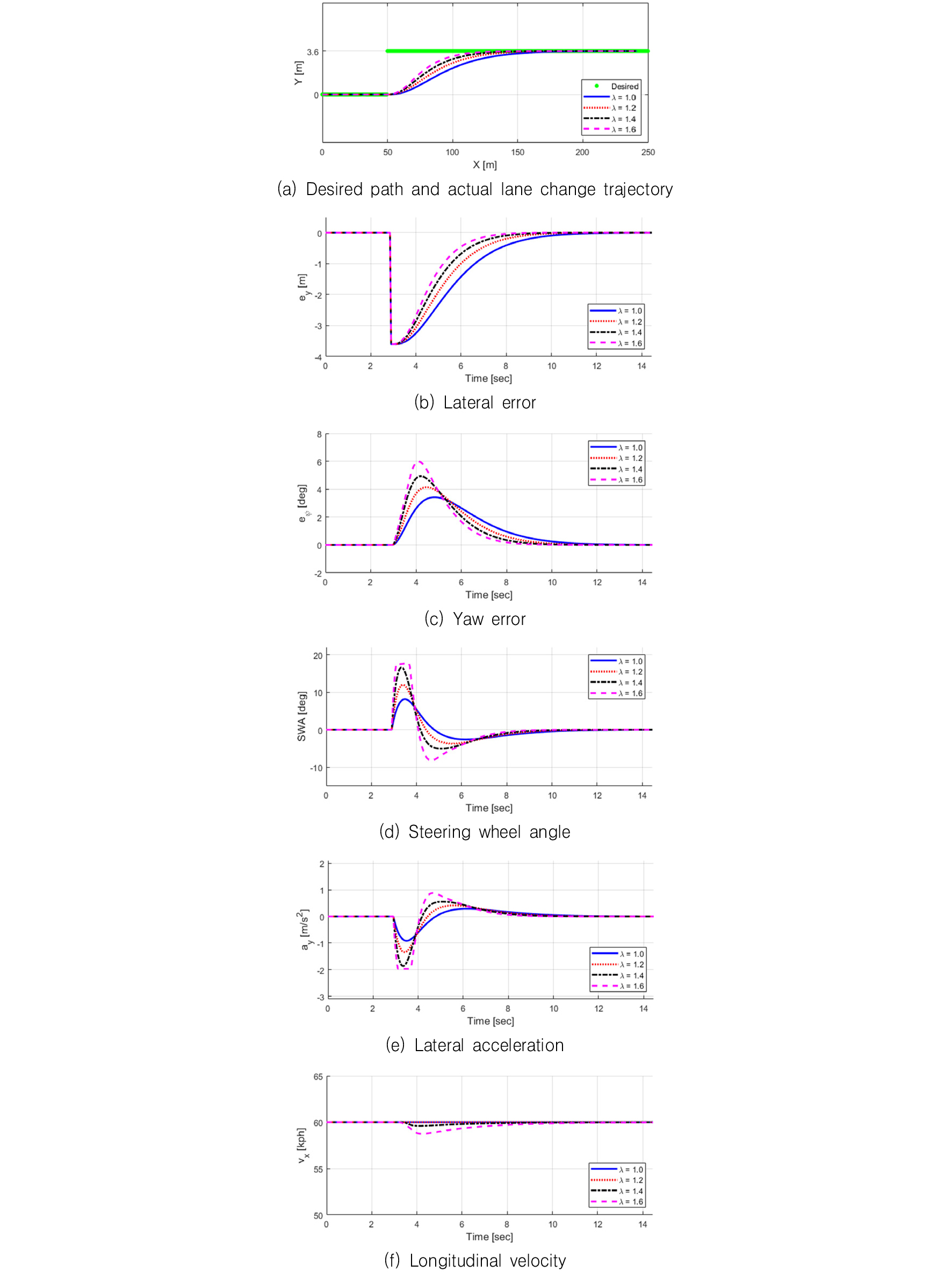
4.2. 시뮬레이션 결과
Figs. 8~12는 Table 2의 각 상황 별 차선변경 시나리오의 결과를 보여준다. 이 결과는 차선 변경 상황에서 사용자가 요구하는 최대 횡 가속도와 차선 변경 시간을 조절할 수 있는 감쇠 상수의 데이터를 제공한다. 더 작은 감쇠 상수를 적용하면 최대 횡 가속도가 작아지고 차선 변경 시간이 길어지면서 부드러운 거동을 구현한다. 감쇠 상수가 커지면 빠르게 차선 변경을 할 수 있지만 최대 횡 가속도가 커져 탑승자에게 나쁜 승차감을 제공할 것이다. 횡 가속도를 제한함으로써 승차감을 개선시킬 수 있지만 지나치게 큰 감쇠 상수에서는 횡 오차의 오버슈트가 발생하거나 진동하여 추종 제어 성능을 감소시킨다.
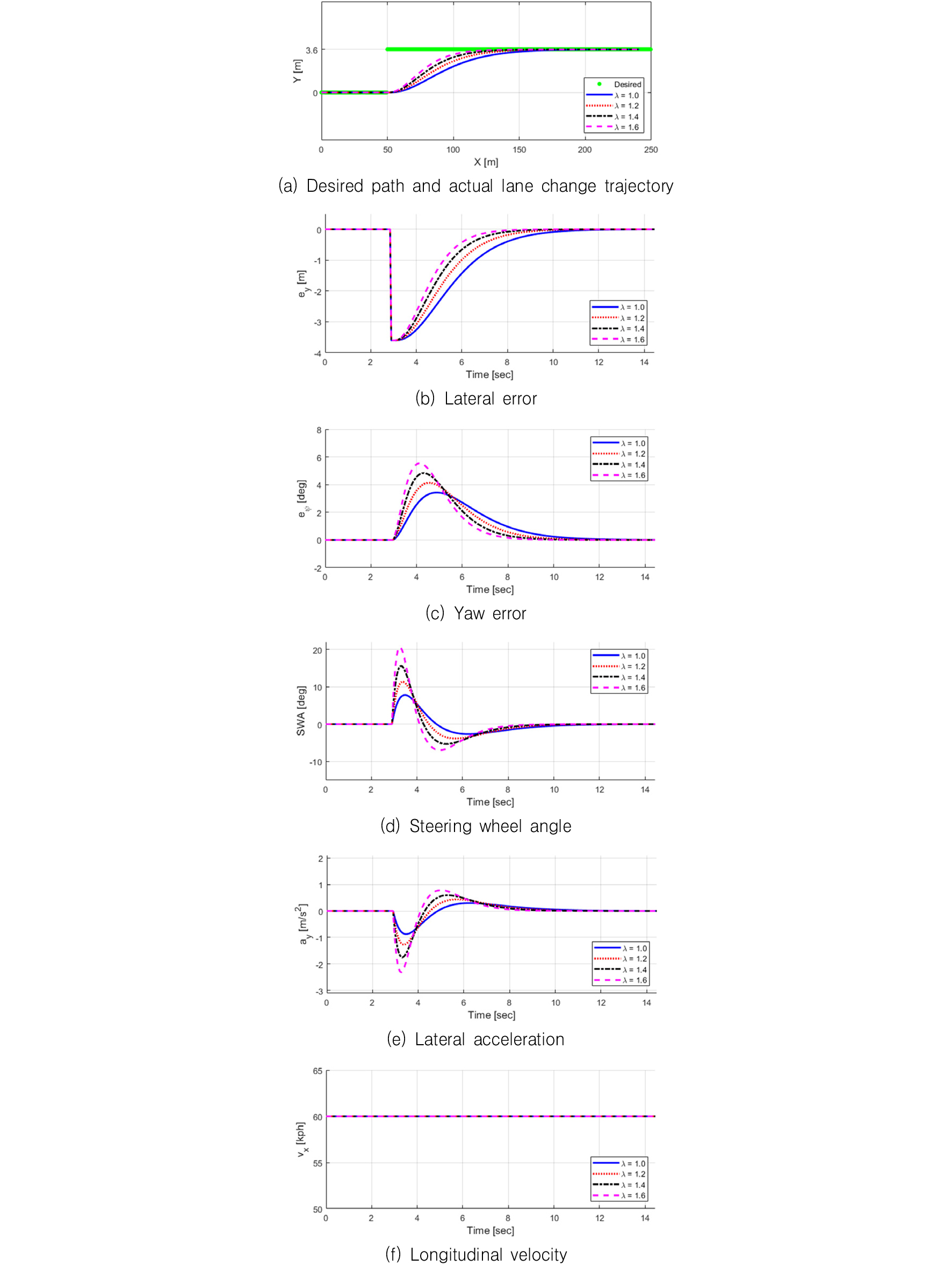
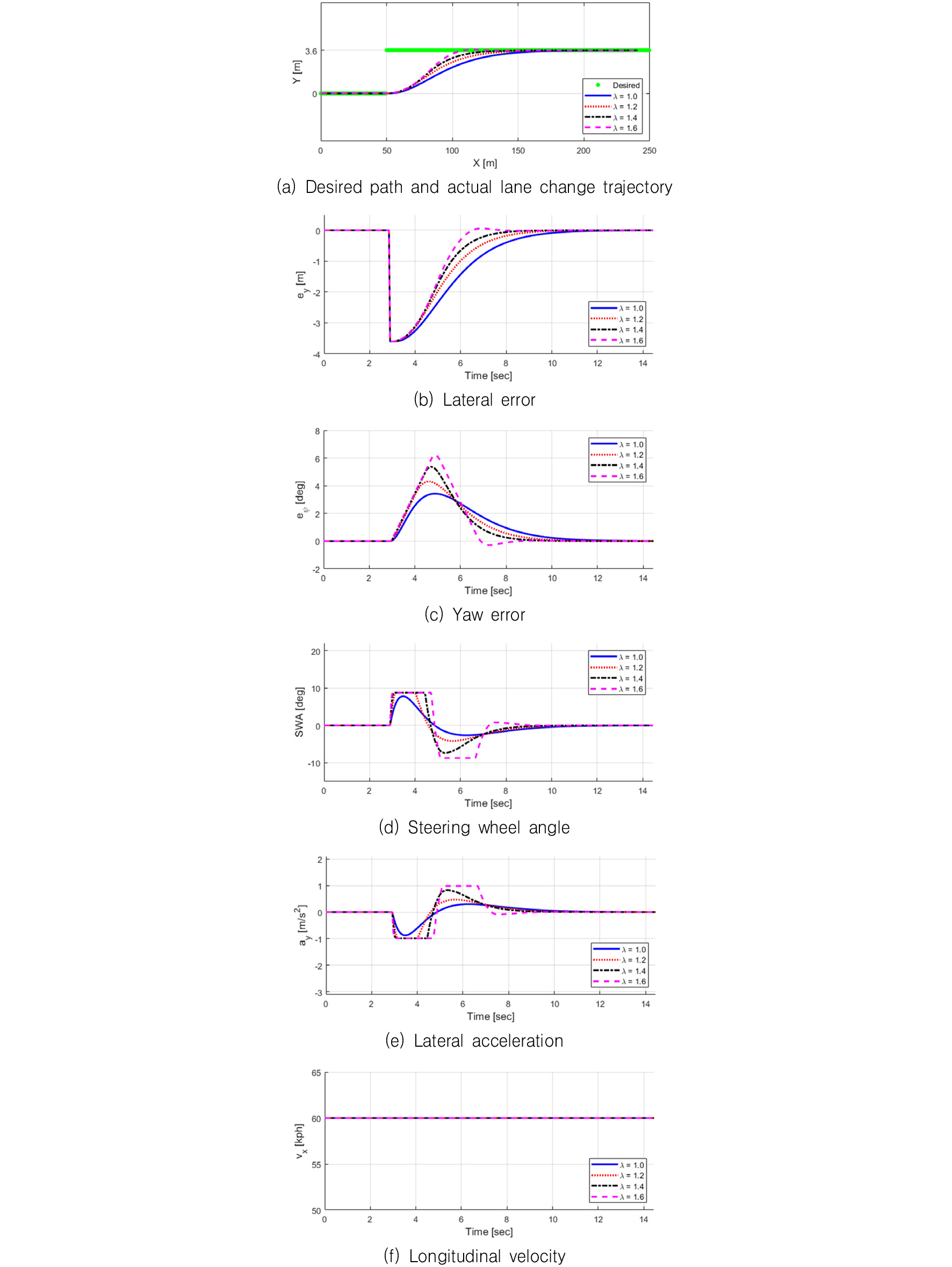
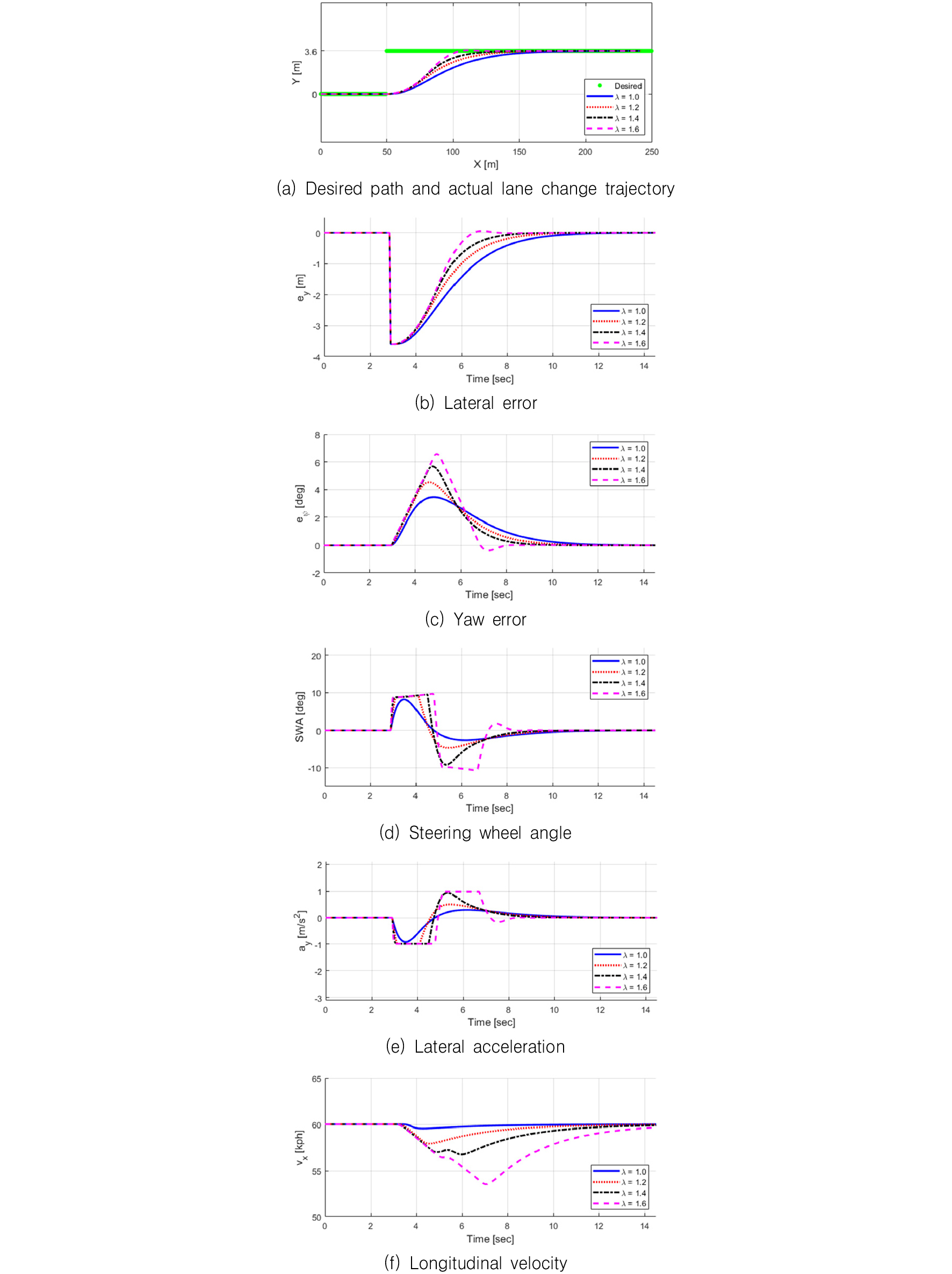
Figs. 8(e)에서 감쇠 상수가 1.6인 경우 최대 횡 가속도의 크기가 2 m/s2를 초과한다. 최대 횡 가속도 인자의 조건이 0.2인 Figs. 11과 12의 Case [3-1], [3-2]에서는 조향각의 제한이 있었음에도 횡 및 방위각 오차가 Fig. 8의 Case [1]과 유사하다. 최대 횡 가속도 인자가 0.1인 Figs. 9(b)와 10(b)에서 감쇠 상수가 1.6인 경우 횡 오차에서 오버슈트가 발생하여 부드러운 수렴이 이루어지지 않았음을 알 수 있다. Figs. 10과 12는 종 방향 속도가 고정되지 않은 상황이다. 최대 횡 가속도에서 조향각이 포화되었을 때 종 방향 속도가 감소하며 조향각이 미세하게 증가한다.
5. 결 론
위 논문에서는 상태 확장 되먹임 제어로 구성된 경로 추종 시스템의 충격 응답 곡선과 차선 변경 궤적의 유사성을 보여주었다. 충격 응답 방식의 차선 변경 시 조향각과 횡 오차의 2계 도함수까지 연속성을 만족하기 위해 적분 상태 변수의 초기 변수에 대한 수학적인 조건을 구하였다. 특정 차로 폭에 대하여 차선 변경 시간과 최대 횡가속도는 감쇠 상수로 정의된 시스템의 특성방정식의 삼중근에 의해서만 결정된다. 최대 횡 가속도 인자와 종 방향 속도 고정 유무 따른 차선 변경의 거동을 감쇠 상수에 대하여 비교하였다. 시뮬레이션의 결과는 사용자가 차선 변경 시 원하는 횡 가속도와 종 방향 거동에 대응하는 적절한 감쇠 상수를 제공한다. 후속 연구에서는 조향의 1계 도함수 연속성을 위한 시스템 구성과 충격 응답 기반 긴급 회피 및 갓길 정차 기술 개발을 계획하고 있다.
