

1. 서 론
2. 전·후륜 모듈러 제동 설계
3. 제동 성능 분석
3.1. 중형 EV 제동 성능 분석
3.2. 대형 EV 제동 성능 분석 - Case 1
3.3. 대형 EV 제동 성능 분석 - Case 2
4. 전기식 유압 부스터의 제동 압력 및 용량 분석
5. 회생 제동을 고려한 EV 제동 성능 분석
6. 회생 제동 누적 에너지 분석
7. 결 론
8. 향후 계획
1. 서 론
최근 글로벌 자동차 산업의 중요한 동향 중 하나는 기존의 ICE(Internal Combustion Engine) 차량을 대체하기 위한 EV(Electric Vehicle)에 대한 많은 설비 투자와 EV의 개발 주도권을 확보하기 위한 활발한 연구 및 개발 전략 수립이라 할 수 있다.
특히, 모터, 인버터 및 배터리 등 EV 전용 부품에 대한 연구가 활발히 이루어 지고 있는 실정이다. 하지만, 샤시 시스템에서도 EV로 전환되면서 냉각 및 내구 등에서 ICE 차량에서 중요하게 고려하지 않았던 많은 문제들이 발생되고 있다.
한편, 글로벌 자동차 제작사들은 매스 커스터마이제이션(Mass Customization)을 포함한 다양한 고객의 요구 사항을 적극적으로 대응하기 위하여 효율적인 차량 제작 방식인 아키텍처(Architecture) 개념을 도입하여 다가올 다품종 대량생산 체제를 대비하고 있으며, 이에 대한 폭넓은 연구가 이루어지고 있다.
VW은 지속적인 MQB(Modular Transverse Kit) 및 MLB(Modular Longitudinal Kit) 개발을 통하여 차량을 효과적으로 개발 및 제작할 수 있는 모듈러 킷(Modular Kit) 개념의 아키텍처를 정립하였다.(1~2)
또한, 토요타의 경우 TNGA(Toyota New Global Architecture)라는 개념을 도입하여 차량 설계를 포괄적인 계획하에 운영 및 개발하고 있다.(3)
당사의 경우도 E-GMP(Electric-Global Modular Platform)을 시작으로 EV 개발에 있어 효율성과 수익성 향상을 도모하고 있다. 여기서, 효과적인 EV 전용 아키텍처 개발을 위하여 각 시스템 별로 모듈러 설계가 요구되고 있다.
이와 같은 상황에서, 제동시스템도 상대 부품과의 물리적 인터페이스 및 성능 목표 달성을 위한 지속적인 연구를 통하여 EV 아키텍처 개발을 위한 기여를 하고 있다. 이때, 전·후륜 브레이크의 경우 기존 ICE 차량 대비 EV에 대한 특성을 반영하여 차량 개발 완성도를 향상 시킬 필요가 있다.
비록, 이전의 연구에서 중소형 ICE 차량을 기반으로 EV로 확대 전개했을 때 제동시스템 관점에서 중요한 특성을 검토하였지만, 이와 같은 연구는 중소형 EV에 한정된 조건이었으며, EV 아키텍처를 통해서 구현된 EV 전용 플랫폼 차량이라고 보기에는 다소 무리가 있다.(7)
특히, 항속거리 확보를 위하여 대용량 배터리와 이를 위해 동반되는 냉각시스템 그리고 다양한 운전자 편의를 위한 차량 공간 설정으로 차량 중량 증가와 가혹한 PE룸(Power Electric Room) 레이아웃이 예상되는 중형 및 대형 EV에 대해서는 별도의 검토가 미흡한 실정이다.
본 연구에서는, 이와 같은 사항을 고려하여 EV 아키텍처에 걸맞는 전·후륜 제동 모듈러 설계에 대하여 고찰하고자 하며, 그 내용은 다음과 같다.
첫째, EV 제원 특성 중 제동 성능에 가장 큰 영향을 미치는 차량 중량을 집중적으로 고찰하여 중형 및 대형 EV에 대한 전·후륜 제동 제원 설정의 적합성을 분석하고자 한다.
둘째, EV에 적용되고 있는 전기식 유압 부스터의 유압 성능 및 작동 특성을 추가적으로 고려한 후 중형 및 대형 EV의 전·후륜 제동 제원 검토와 병행하여 분석하고자 한다. 이때, 회생제동 특성을 함께 고려할 것이다.
끝으로, 위의 연구 결과를 이전의 연구인 경형 및 중소형 제동시스템 연구와 연계함으로써, 전체 차급별 EV 아키텍처 개발에 대한 제동 제원 설정의 중요 원리 연구로써 기여하고자 한다.
2. 전·후륜 모듈러 제동 설계
중형 및 대형 EV를 대상으로 제동 모듈러 설계를 위하여 상대 부품간 물리적 인터페이스를 검토하였으며, Fig. 1에 인터페이스 설계 결과를 도시하였다.
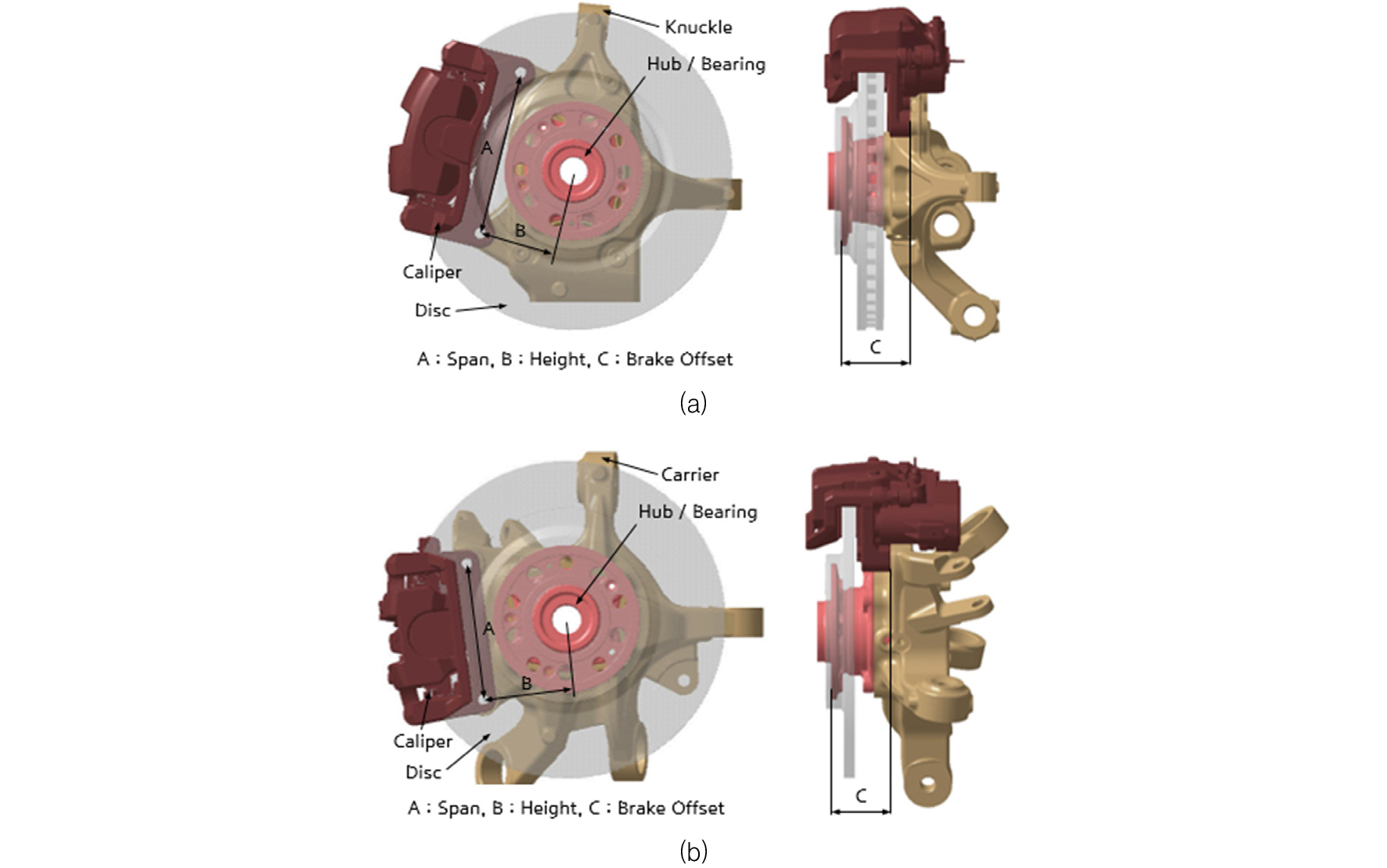
제동 부품인 캘리퍼(Caliper)와 디스크(Disc)에 대하여 상대 부품인 너클(Knuckle), 허브(Hub), 베어링(Bearing) 및 캐리어(Carrier)와의 물리적 인터페이스를 검토하였으며, EV 아키텍처를 구현하기 위한 주요 제동 모듈러 설계 제원으로 스팬(Span), 하이트(Height), 브레이크 옵셋(Brake Offset)에 대한 인터페이스를 표준화 하였다.(7)
여기서, 스팬은 캘리퍼를 너클에 장착하기 위한 캘리퍼 장착부의 좌·우 거리, 하이트는 휠 센터에서 스팬 장착부까지의 상대 거리 그리고 브레이크 옵셋은 차량 측면에서 봤을 때 허브 장착면과 맞닿는 디스크 안쪽면과 너클의 캘리퍼 장착부 까지의 거리를 각각 나타낸다.
이와 같은, 모듈러 설계를 통한 표준화를 기반으로 EV 차급별로 상대 부품의 변경 없이 제동 제원을 변경하여 차량 개발 효율성 향상과 추가 설계변경의 억제를 통한 별도의 개발비 발생이 저감될 수 있도록 하였다.(4)
3. 제동 성능 분석
3.1. 중형 EV 제동 성능 분석
제동 성능은 차량 중량, 전·후 축중 배분, 휠베이스, C.G.H(Center of Gravity Height), 타이어 동반경과 같은 차량 제원에 의하여 결정되는 이상 제동선(Ideal Brake Force Line)과 전·후륜 제동 제원에 의해 결정되는 실 제동선(Real Brake Force Line)과의 관계를 통하여 분석할 수 있다.
Fig. 2는 이와 같은 관계를 통하여 얻어진 중형 EV에 대한 제동 성능 검토 결과를 나타내고 있다.
먼저, Fig. 2의 (a)는 중형 EV에 대하여 차량 총중량인 G.V.W(Gross Vehicle Weight)를 반영한 제동 성능 검토 결과를 나타내고 있으며, (b)는 2인 탑승을 반영한 차량 공차중량 2up C.V.W(Curb Vehicle Weight)를 반영한 제동 성능 검토 결과를 각각 나타내고 있다.
G.V.W와 2up C.V.W를 각각 검토한 이유는 EV에 대하여 제동 관점에서 가혹한 차량 조건과 실 사용 조건에서의 제동 성능 영향을 각각 분석하기 위함이다.
또한, 차량 제원 중 차량 중량을 제외한 나머지 제원들은 경쟁사와 비교했을 때 중형 또는 대형 차급별로 유사하게 설정 및 개발됨으로, 제동시스템 개발에 있어 가장 영향도가 크고 목표달성이 어려운 차량 중량 관점에서 집중적으로 검토를 수행하였다.
여기서, 본 연구에서 사용된 노면 한계 및 최대 감속도는 ICE 고급 차량 및 EV와 같은 고출력 차량에서 검토시 사용하는 1.1 μ 및 1.1 g 조건을 기준으로 하였다.
Fig. 2의 (a)에서 이상 제동선과 실 제동선이 교차되는 접점인 임계 감속도(Critical Deceleration)는 1.13 g로 나타내고 있으며, (b)에서는 0.96 g를 각각 나타내고 있다.
그리고 제동 안전성을 고려하여 일반적으로 임계 감속도 약 95%에서 EBD(Electronic Brake Force Distribution)가 개입되어 ABS(Anti-Lock Brake System)가 기능을 시작하는 전륜 마찰 한계선(Front Friction Limit Line)까지 작동되는 것으로 나타났다.
여기서, 제동 제원에 의해 결정되는 실 제동선은 차량 중량과 무관하게 일정한 기울기를 갖는 것을 확인할 수 있으나, G.V.W와 2up C.V.W의 차이에 의한 이상 제동선의 하향으로, 임계 감속도 하향과 EBD 작용 시점이 변화됨을 확인할 수 있다.
이전의 중소형 EV 아키텍처를 위한 제동 모듈러 설계 연구에서 임계 감속도를 하향 되게 형성하여 이상 제동선을 근접하게 추종함으로써, 전·후륜 브레이크의 효율성을 향상시키는 것이 효과적임을 확인 하였다.(7)
하지만, 중형 EV의 경우 배터리 및 전장 부품과 다양한 편의 장치의 구성으로 인하여 중형 차량이지만 대형 ICE 차량보다 차량 총중량이 크게 상회하는 실정이다. 이는 중소형 ICE 차량을 대체하기 위하여 중소형 EV를 개발할 때 보다 더욱 가혹한 조건이다.
물론, 후륜 캘리퍼와 디스크의 사이즈 증대를 통하여 임계 감속도를 하향 시킬 수는 있으나, 휠 공간내에서의 사이즈 제한과 과도한 중량 및 원가 상승이 발생하게 된다.
또한, 현재 글로벌 EV시장의 경우 선진 제조사들이 차량의 높은 가격을 고려하여 기존 고성능 ICE 차량을 주요 경쟁 시장으로 선정하여 점유율을 증대하는 전략을 사용하고 있다. 따라서, 현실적으로 G.V.W대비 2up C.V.W를 기준으로 운전자의 실사용 조건을 반영하여 전·후륜 제동 제원을 설정하는 것이 당분간 지속적인 EV 차량 개발에 있어 유리할 것으로 판단된다.
이와 같은 점을 고려하여 Fig. 2의 (a)와 (b)를 비교하였을 때, 2up C.V.W에서 G.V.W대비 이상 제동선을 더 근접하게 추종하고 있음을 확인할 수 있다.

3.2. 대형 EV 제동 성능 분석 - Case 1
Fig. 3의 (a)는 G.V.W를 고려한 제동 성능을 나타내고 있으며, (b)는 2up C.V.W를 고려한 대형 EV의 제동 성능을 각각 나타내고 있다.
대형 EV의 경우 중형 EV 대비 실 제동선이 G.V.W와 2up C.V.W를 반영한 이상 제동선을 모두 잘 추종하고 있다. G.V.W의 경우 임계 감속도는 0.99 g 이며, 2up C.V.W의 임계 감속도는 0.8 g를 각각 나타내고 있다.
대형 EV가 중형 EV 대비 임계 감속도 하향을 통한 이상 제동선 추종에 있어 용이한 이유는 휠 공간 제약과 개발 목표 등이 중형 EV 대비 우세하기 때문에 제동 모듈러 설계에 있어서 비교적 자유도가 용이하기 때문이다.
한편, 중형 및 대형 EV 모두 EBD 개입 구간과 ABS 개시 시점의 차이는 차량 제동 시간에 대한 영향도가 거의 미미함으로, 대형 EV의 경우 Fig. 3의 임계 감속도 수준에서 효과적으로 이상 제동선을 추종한다고 볼 수 있다.

3.3. 대형 EV 제동 성능 분석 - Case 2
대형 EV 를 좀 더 확장하여 대형 EV 보다 제동시스템 측면에서 차량 제원 조건이 다소 가혹할 수 있는 밴(Van) 및 픽업(Pick-up) 등과 같은 대형 상용 EV에 대한 제동 성능을 검토하였다.
Fig. 4의 (a)와 (b)는 Fig. 3의 전·후륜 제동 제원을 동일하게 대형 상용 EV의 G.V.W와 2up C.V.W에 각각 반영한 제동 성능 검토 결과를 나타내고 있다.
도시된 바와 같이, Fig. 4의 검토 결과를 Fig. 3의 결과와 상대 비교했을 때, G.V.W는 임계 감속도가 0.99 g에서 0.93 g로 하향하였으며, 2up C.V.W는 임계 감속도가 0.8 g에서 0.7 g로 하향한 것으로 각각 나타났다.

일반적으로, 대형 상용 EV가 대형 EV 대비 차량 총중량에서 다소 불리하기 때문에 제동 측면에서는 이상 제동선이 대형 EV 보다 다소 위로 올라갈 것으로 예상할 수 있으며, 순차적으로 임계 감속도의 상향을 유도할 것으로 예측할 수 있다.
하지만, 이와 같은 반대 현상이 나타난 이유는 상용의 특성에서 C.G.H가 승용 대비 매우 높으므로 이상 제동선을 고려했을 때, 차량 감속도가 증가함에 따라서 전륜에 제동력이 더 크게 요구되기 때문이다.
이와 같은 결과로 이상 제동선의 기울기가 고감속 영역으로 갈수록 하향 되면서, 임계 감속도가 하향 되는 것을 확인할 수 있었다.
한편, Fig. 5는 상용의 또 다른 특징인 작은 휠 사이즈를 고려한 G.V.W 및 2up C.V.W에 대한 제동 성능 검토 결과를 나타내고 있다. 이때, 차량 중량 및 C.G.H는 Fig. 4의 결과와 상대 비교할 수 있도록 동일한 조건에서 제동 성능을 검토하였다.
먼저, Fig. 5의 (a) G.V.W 경우 임계 감속도가 1.12 g로 나타났으며, (b)의 2up C.V.W 임계 감속도는 0.88 g로 Fig. 4의 결과와 상대 비교시 매우 상향되는 것으로 각각 나타났다.
특히, Fig. 5의 (a) G.V.W 조건에서는 임계 감속도가 노면 한계 1.1 μ 및 최대 감속도 1.1 g 영역 밖에서 형성되어 실 제동선이 이상 제동선에서 상당히 벗어나 있는 것으로 나타났다.
이와 같은 결과는, 전륜에 제동력이 집중하게 되어 전·후륜 제동시스템의 불균형을 발생시키게 된다.
그리고, 결과적으로 이상 제동선을 덜 추종하게 되어 제동 효율성을 상대적으로 저하시키게 된다.
하지만, 상용 EV임을 고려했을 경우에 제작사는 항상 고객의 사용 목적과 차량 구매 비용에 부합하여 차량을 개발해야 하기 때문에, 작은 휠을 사용하여 차량의 가격 부담을 낮출 수 있는 Fig. 5의 결과 역시 차량 판매 소구점을 위해서 선택적으로 활용할 수 있다.
참고로, Fig. 5 (a)의 G.V.W 조건에서는 Fig. 2 (a)의 중형 EV G.V.W에서 관찰되는 EBD 작동 구간처럼 ABS 진입 바로 전에 EBD가 약간 작용하는 것을 볼 수 있다.

4. 전기식 유압 부스터의 제동 압력 및 용량 분석
ICE 차량과 다르게 EV는 엔진 부압을 사용할 수 없기 때문에 전기식 유압 부스터를 활용하여 유압을 형성하게 된다. 이때, 전기식 유압 부스터 용량이 가용한 범위 내에서 제동시스템의 제원을 동시에 고려하여야 한다.
Table 1은 3.1장에서 3.3장까지 논의 되었던 EV 차급별 제동시스템에 대한 전기식 유압 부스터의 제동 압력과 필요 용량에 대한 검토 결과를 나타내고 있다.
Table 1.
Comparisons of hydraulic pressure and volume
먼저, 중형 EV의 경우 대형 EV 대비 상대적으로 작은 전·후륜 제동시스템 제원을 적용하기 때문에 전기식 유압 부스터의 용량 제원 대비 29%의 여유 용량을 갖는 것으로 나타났다.
하지만 대형 EV의 경우 차량 중량 증가에 따라서 제동시스템 제원을 증가할 수 밖에 없기 때문에 여유 용량이 2% 밖에 없는 것으로 나타났다.
특히, 대형 상용 EV에 작은 휠을 적용한 경우에는 상대적으로 작은 제동 제원을 활용하여 ABS 승압 시점까지 높은 압력을 발생시켜야 하기 때문에 여유 용량이 오히려 2% 부족한 것으로 나타났다.
이와 같은 경우, 전기식 유압 부스터의 가용 용량을 증대시키거나, 차량의 제동 지연을 감수할 수 밖에 없게 된다.
전자의 경우 전기식 유압 부스터의 용량을 증대시킴으로써 해결할 수 있으나, EV의 PE룸 레이아웃 고려시 모터 및 인버터 같은 전장 부품과 실내공간 증대를 위하여 공조시스템이 PE룸 내부로 설정되어 레이아웃의 여유 공간이 부족할 실정이며, 추가적으로 전기식 유압 부스터의 중량 및 원가 상승 부담이 발생하게 된다.
한편, 후자의 경우는 추가적인 PE룸 레이아웃이나 중량 및 원가 상승은 발생하지 않으나, 제동 상품성을 저하시키기 때문에 바람직한 방법이라고 할 수 없다.
따라서, 지속적으로 차량 중량 증대가 예상되는 EV 개발 대응을 위하여 제동 유압을 저감시킬 수 있는 많은 연구가 필요할 것이다.
5. 회생 제동을 고려한 EV 제동 성능 분석
EV는 모터를 이용한 전자기 유도 현상을 통하여 구동 및 발전을 하기 때문에 차량 감속시 회생 제동이 가능하며, 이를 통해서 전비를 크게 향상시킬 수 있는 장점을 가지고 있다.
또한, 최근의 회생 제동의 발전 방향은 유압 제동과 협조 제어를 통하여 지속적으로 회생 제동의 양을 증대시키는 추세로 발전하고 있다.(5~7)
Table 2는 이와 같은 회생 제동 효과를 반영하여 Table 1의 유압 제동과 상대 비교한 결과를 나타내고 있다.
Table 2의 결과값은 ABS 진입 시점의 전·후륜 차량 감속도에 대하여 회생 제동 0.1 g를 각각 반영한 후 해당 감속도를 차량 중량, 타이어 동반경 및 전·후륜 제동 제원을 추가로 반영하여 회생 제동 0.1 g 를 고려한 제동 압력을 산출한 결과이다. 그리고, 산출된 제동 압력을 기준으로 캘리퍼, 호스, 튜브 및 전기식 유압 부스터의 소요액량을 각각 계측하여 회생 제동 적용 유무에 따른 비교 결과값을 산출하였다.
Table 2.
Comparisons of result wi/wo regenerative braking
먼저, 중형 EV의 경우 ABS 진입 시점에서 회생 제동 0.1 g 반영시 전륜 14%, 후륜 30%의 유압 제동 저감 효과를 확인하였으며, 대형 EV의 경우 전륜 13%, 후륜 21%의 유압 제동 저감 효과를 각각 확인하였다. 또한, 전기식 유압 부스터의 용량도 중형 EV 19%, 대형 EV 13%가 각각 향상되었다.
특히, 문제시 되었던 대형 상용 EV에 작은 휠을 적용한 경우에서도 전륜 13%, 후륜 27%의 제동 유압 저감 효과를 얻을 수 있었다. 그리고 전기식 유압 부스터의 용량도 추가 증대 필요 없이 13%의 여유 용량을 확보할 수 있었다.
비록, 아직까지는 차량 선회, 배터리, 모터, 인버터의 작동 온도, SOC(State of Charge), 급감속 및 저 마찰로 등의 조건에서 차량 안전성을 위하여 회생 제동을 제한하고 있다.
그러나, 이와 같이 적극적으로 회생 제동을 활용하여 EV를 개발할 경우 제동 유압 사용을 저감할 수 있으며, 회생 제동 협조 제어를 통하여 전기식 유압 부스터의 용량 증대와 차량의 제동 지연과 같은 문제를 해결할 수 있게 된다.
따라서, 다양한 차급의 EV를 효율적으로 개발하기 위해서는 전·후륜 제동시스템의 모듈러 설계와 더불어 회생 제동을 최대한 활용할 수 있는 전기식 유압 부스터 및 협조 제어 기술 역량을 동시에 향상시키는 것이 제동 제원 설정에 있어서 매우 효과적일 것이다.
6. 회생 제동 누적 에너지 분석
ICE 차량은 제동 중 운동에너지를 열에너지로 변환 후 대기로 소멸되는 방식으로 에너지를 소비한다. 그러나, EV는 열에너지를 회수하여 주행 상황에서 활용함으로써 에너지 회수가 가능하다.
이와 같은 이유는, 모터를 강제적으로 회전시키면 발전기가 되는 가역성을 활용하여 운동에너지를 전기에너지로 변환할 수 있기 때문이다. 이와 같은 점을 고려하여, 특정 주행 모드를 기준으로 EV의 제동 에너지에 대한 회생 효율을 분석하였다.(8)
Fig. 6은 대표적으로 활용되고 있는 주행 모드인 WLTP(Worldwide Harmonized Light Vehicle Test Procedure) 모드에 대한 제동 누적 에너지 시뮬레이션 결과를 나타내고 있다. 참고로, WLTP 모드는 최고 속도 131 KPH, 최대 감속도 0.153 g에서 주행거리 23.3 km를 1,801초 동안 평가하는 모드이다.
Fig. 6의 (b)와 (c)는 (a)의 WLTP 모드에 대한 중형 EV와 대형 EV의 누적 에너지 분포를 각각 나타내고 있다.
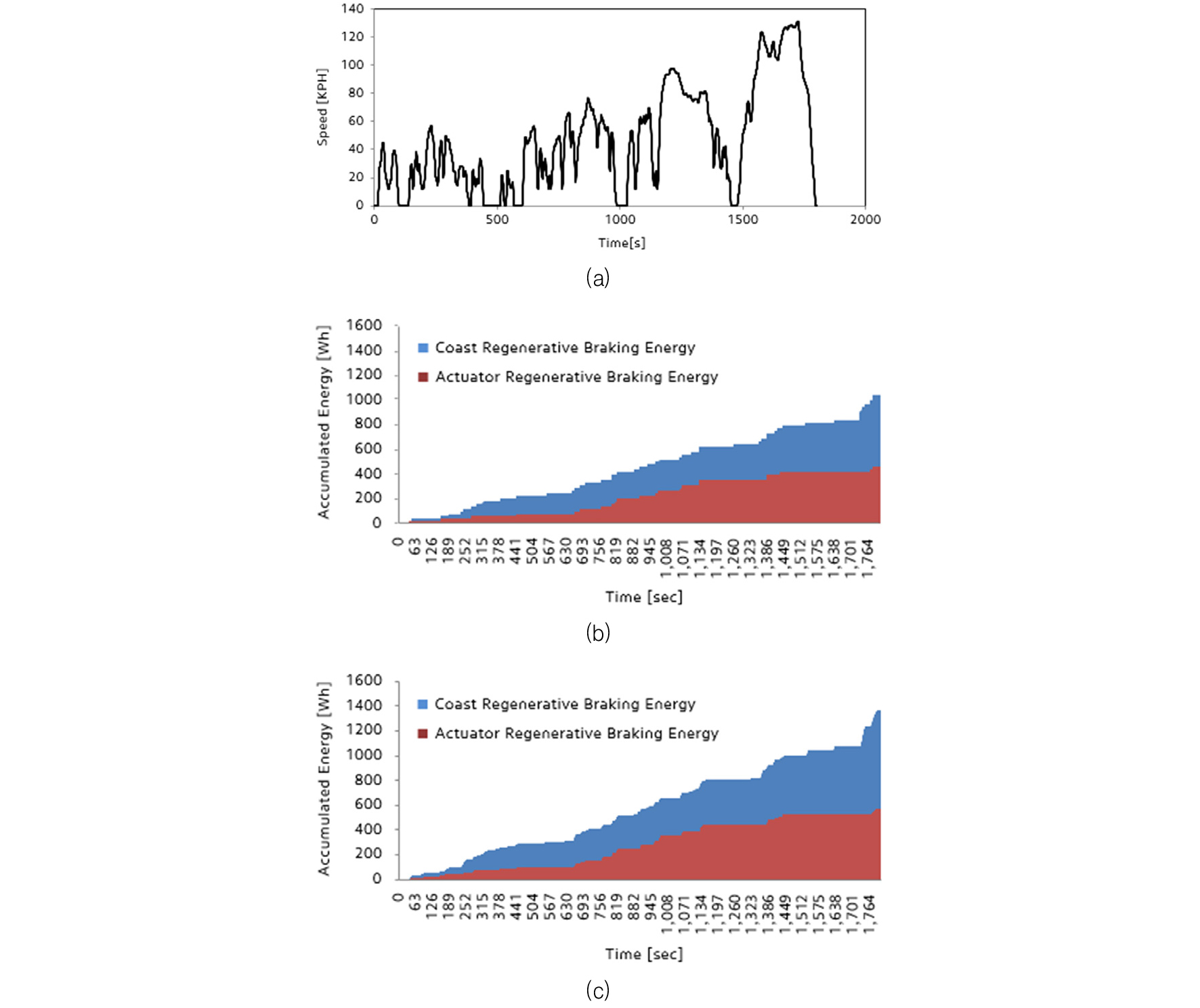
도시된 바와 같이, 두 평가 모두 주행 마감시간에 가까울수록 누적 에너지의 양이 선형적으로 누적됨을 볼 수 있다. 그리고, 코스트 회생 제동과 전기식 유압 부스터를 포함한 회생 효율에서는 중형 EV는 99.88%, 대형 EV는 99.89%의 높은 효율을 각각 얻는 것으로 나타났다.
여기서, 시뮬레이션의 입력은 주행 모드, 모터 제원, 제동 제원, 차량 제원 그리고 코스트 회생 제동(Coast Regeneration Braking)을 활용하였으며, 입력 제원에 대한 처리는 구동 방식과 전기식 유압 부스터를 고려하여 출력 값을 산출하였다.(7)
그리고, 유압 제동은 주행 모드 중 일부 감속도가 크게 높아지는 구간을 제외하고는 불필요한 것으로 나타났다.
따라서, 5장에서 전술한 바와 같이 지속적으로 회생 제동의 양을 증가시키는 방향으로 EV를 개발하는 것이 제동 모듈러 사양 설정과 사양 복잡성 저감에 유용할 것으로 판단된다.
7. 결 론
본 연구는 최근 글로벌 자동차 산업에서 매우 폭넓게 급증하고 있는 EV 아키텍처 개발 경쟁에 대응하기 위한 제동 모듈러 설계에 관한 연구였으며, 아래와 같은 유용한 결론을 얻을 수 있었다.
1) 전·후륜 제동시스템과 상대 부품과의 물리적 인터페이스를 고려했을 경우, 요구되는 표준화 제원을 고찰하였다. 그 결과, 스팬, 하이트, 브레이크 옵셋 표준화를 통한 캘리퍼와 디스크의 인터페이스 구현이 조립 및 호환 장착에 유효함을 확인하였다. 그리고 이와 같은 표준화 결과를 통하여 EV 아키텍처를 위한 제동 제원을 수립 하였다.
2) 중형 및 대형 EV에 대하여 제동 모듈러 설계 결과를 반영하여 차급별 제동 성능 검토를 수행하였다. 중형 EV의 경우 제한된 차량 중량 및 휠 공간내에서 표준화 결과가 유효 하였으며, 대형 EV의 경우는 중형 EV 대비 보다 효과적으로 이상 제동선을 추종하는 것을 확인하였다. 그러나, 대형 상용 EV를 고려한 검토에서는 대형 EV 대비 열악한 차량 제원으로 인하여 제동 특성이 다소 비효율적임을 확인하였다.
3) 전기식 유압 부스터의 용량과 PE룸 레이아웃을 고려하여 ABS 진입 시점의 제동 압력을 고찰하였으며, 지속적으로 차량 중량이 증대될 것으로 예측되는 EV를 고려했을 때 전기식 유압 부스터의 용량 증대 또는 차량의 제동 지연이 우려됨을 확인하였다.
4) EV 특성인 회생 제동을 반영한 유압 제동과의 협조 제어를 고려하여 EV 차급별 유압 및 전기식 유압 부스터의 용량을 재검토 하였으며, 추가적인 전기식 유압 부스터의 용량 증대 및 차량의 제동 지연 없이 차급별 EV 개발이 가능함을 확인하였다.
5) 회생 제동을 고려한 누적 에너지 검토를 위하여 WLTP 모드에 대한 전비 시뮬레이션을 수행하였으며, 회생 제동과 유압 제동에 대한 상대 비교 및 향후 회생 제동 증대 효과에 대해서 고찰하였다.
6) 끝으로, 이전의 경형 및 중소형 EV 연구와 연계하여 전 차급별 EV 아키텍처에 대한 제동 모듈러 설계 방안을 수립 하였으며, 향후 다양한 EV 전용 플랫폼 개발에 있어 제동 사양의 복잡성 저감과 개발 효율성, 생산성 및 수익성 향상에 기여할 수 있도록 하였다.
