

1. 서 론
2. 이론적 배경
2.1. KADAS 기반 VILS 평가 기술
2.2. ADAS 카메라 센서 기술 및 센서 퓨전
3. 연구 방법
3.1. 대상 차량 및 센서 아키텍처
3.2. 평가 시나리오 및 측정지표
4. 연구 결과 및 분석
4.1. ACC 기능 성능 비교
4.2. AEB/FCW 기능 성능 비교
4.3. LDWS/LKAS 기능 성능 비교
5. Discussion
6. 결 론
1. 서 론
첨단 운전자 보조 시스템(Advanced Driver - Assistance System, ADAS)은 차량의 안전성을 획기적으로 향상시키고 운전자의 편의를 증진시키는 핵심 기술로 자리 잡고 있다.(1) 자동 긴급 제동(AEB), 적응형 순항제어(ACC), 차량 이탈경고(LDW) 및 보조(LKA) 등 다양한 ADAS 기능은 교통사고 감소에 크게 기여하며, 그 중요성이 더욱 증대되고 있다. 그러나 ADAS 기술이 빠르게 발전하고 상용화됨에 따라, 이러한 시스템의 신뢰성과 성능을 검증하는 평가 기술의 중요성 또한 부각 되고 있다. 실제 도로 환경에서의 평가가 가장 이상적일 수 있지만, 이는 높은 비용과 시간 소요, 그리고 재현성 및 위험성 측면에서의 한계를 지닌다.
이러한 한계를 극복하기 위해 차량-인-더-루프 시뮬레이션(Vehicle-in-the-loop Simulation, VILS)과 같은 가상 환경 기반의 평가 기술이 주목 받고 있다.
VILS는 실제 차량의 센서와 제어 시스템을 가상 환경 시뮬레이터에 연결하여 차량의 동적인 거동을 모사하고 ADAS 기능을 정밀하게 평가할 수 있는 효율적인 방법이다. 이를 통해 다양한 주행 시나리오를 반복적이고 통제된 환경에서 재현하며, 실제 도로 시험에서 발생할 수 있는 위험을 최소화 할 수 있다.
국내에서는 한국교통안전공단이 자율주행차 성능 및 안전성 평가를 위한 KADAS(Korea Automated Driving Vehicle Assessment System)를 개발(2)하여 운영하고 있으며, 이는 전조등, 제동력 등 일반적인 차량 검사 뿐만 아니라 ACC, FCWS, LDWS, LKAS, AEBS 등 첨단 안전장치 검사 까지 포함한다.(3) KADAS 시스템은 특히 ECU 통신 없이도 4륜 검사 및 ADAS 검사가 가능하다는 장점을 가진다.(4)
하지만 현재 VILS 환경을 이용한 ADAS 평가 연구는 주로 특정 센서 아키텍처를 가정하거나, 보편적인 시뮬레이션 환경에서의 기능 검증에 초점을 맞추고 있다. 다양한 자동차 제조사들이 각기 다른 종류의 센서(카메라, 레이더, 라이다 등)와 센서 퓨전 방식(데이터 융합 방식)을 채택하고 있으며, 이러한 센서 아키텍처의 차이가 VILS 환경에서의 ADAS 성능 평가 호환성에 어떤 영향을 미치는지에 대한 실증적인 연구는 상대적으로 부족한 실정이다. 특히 VILS 환경의 2D 디스플레이 기반 가상 환경이 실제 센서의 물리적 특성을 완벽하게 모사하기 어려운 경우, 특정 센서 아키텍처에서 오작동을 유발할 수 있다.(5,6)
본 연구는 KADAS 기반 VILS 환경에서 모노카메라를 주로 사용하는 A차량과 스테레오를 사용하는 B차량이라는 대표적인 두가지 센서 아키텍처를 가진 차량의 ADAS 기능을 비교 평가하여, VILS 환경이 다양한 ADAS 카메라 센서 아키텍처와 얼마나 잘 호환되는지, 그리고 그 성능 특성 차이를 심층적으로 분석한다. 이를 통해 VILS 환경 기반의 ADAS 평가 기술이 나아가야 할 방향을 제시하고, 다양한 센서 구성에 대응할 수 있는 효과적인 평가 방법을 모색하고자 한다.
2. 이론적 배경
2.1. KADAS 기반 VILS 평가 기술
VILS는 실제 차량의 동력계, 제동 시스템, 조향 시스템 등을 시뮬레이션 환경과 연결하여 차량의 동적인 거동을 모사하고 ADAS 기능을 평가하는 시스템이다. KADAS 시스템은 Fig. 1과 같이 구성되어 있으며, 이러한 VILS 환경을 통해 ADAS 검사를 수행한다. 핵심 구성 요소는 다음과 같다.

Roller Dynamometer : 차량의 바퀴를 구동하여 속도, 가속도 등 주행 파라미터를 제어하며 차량의 조향각 등 정밀하게 수행(좌우 10°)
Monitor : 전방 카메라 센서에 시뮬레이션 된 가상환경을 제공하며 60 hz이상의 주파수를 가지고 있다.
RTS : 차량의 레이더 센서에 시뮬레이션 된 가상 레이더 신호를 제공하며, 객체 신호를 발생시킨다.
KADAS는 이러한 대표적인 구성요소를 통해 ACC, AEB, LDWS, LKAS, FCW 등 주요 ADAS 기능의 성능을 재현성 잇고 안전하게 평가할 수 있도록 설계되었다. 이는 실제 도로 시험의 위험성과 물리적 제약을 극복하고 다양한 시나리오에 대한 반복적인 검증을 가능하게 한다.
또한 KADAS 시스템의 경우 현행 검사 방법에 비해 Table 1과 같이 추가적인 검사를 가능할 수 있게 하는 All-in-one 시스템으로 구축되었다.
Table 1.
Advantages of the KADAS System
| Classification | Current | KADAS | |
| Braking | ○ | ○ | |
| Speedometer | ○ | ○ | |
| Headlight | Regular | ○ | ○ |
| Adaptive headlight system | × | ○ | |
| Emissions (load) | 2WD | ○ | ○ |
| 4WD | × | ○ | |
| ADAS | × | ○ | |
| TCS | × | ○ | |
| ABS | × | ○ | |
2.2. ADAS 카메라 센서 기술 및 센서 퓨전
ADAS는 주변 환경을 인지하기 위해 다양한 센서를 활용하며, 그중 카메라는 차량 전방의 도로 상황, 차선, 다른 차량 및 보행자 등을 인식하는데 필수적인 역할을 한다. 카메라 센서는 크게 모노카메라와 스테레오 카메라로 분류 될 수 있다.
모노카메라 : 단일 렌즈를 사용하여 2D 이미지를 획득한다. 객체 인식 및 분류는 딥러닝 기반의 객체 감지 알고리즘을 통해 수행되며, 객체까지의 거리는 주로 객체의 크기와 예상되는 실제크기 간의 관계, 또는 TTC(Time to Contact) 개념 등을 통해 추정한다. 모노 카메라는 구조가 단순하고 비용이 저렴하고, 높은 해상도를 제공하여 광범위한 시야각에서 객체 인식에 유리하다.
스테레오 카메라 : 두 개의 렌즈(카메라)가 일정 거리(기준선)를 두고 설치되어 사람의 눈과 유사하게 작동한다. 두 카메라가 획득한 이미지간의 시차(Disparity)를 이용하여 삼각 측량법을 통해 객체의 3D 깊이 정보(거리)를 직접적으로 계산한다. 이 방식은 비교적 정확한 거리 정보를 제공하며, 장애물의 입체적 형상을 파악하는데 유리하다. 그러나 두 카메라 간의 정밀한 캘리브레이션이 필요하며, 광원 변화나 환경 조건에 따라 깊이 정보의 정확도가 영향을 받을 수 있다. 특히 VILS 환경처럼 2D 디스플레이 기반의 가상 환경에서는 실제와 같은 완벽한 시차 정보 생성이 어려워 깊이 인식에 한계가 발생 할 수 있다.
ADAS 시스템은 하나 또는 여러 종류의 센서에서 얻은 정보를 융합하는 ‘센서 퓨전’ 기술을 통해 주변 환경을 종합적으로 인지한다. 센서 퓨전은 정보의 신뢰성을 높이고 개별 센서의 한계를 보완하는 역할을 한다. 대표적인 센서 퓨전 방식 중 하나는 ‘AND’ 조건 기반의 퓨전이다. 이는 여러 센서가 동시에 동일한 객체를 인지하고 그 정보가 일치할 때만 ADAS 기능을 활성화 하는 보수적 방식이다. 예를 들어, 레이더가 전방 차량을 감지하더라도 카메라가 해당 객체를 명확히 식별해야함 AEB가 작동하는 방식이 여기에 해당한다. 이러한 보수적인 로직은 오작동을 줄이는 장점이 있지만, VILS환경에서 특정 센서의 문제가 발생할 경우 전체 시스템의 지연이나 오작동을 유발할 수 있다.
3. 연구 방법
3.1. 대상 차량 및 센서 아키텍처
시험 차량 모두 전방 레이더와 같은 추가 센서를 장착하고 있으나, 본 연구에서는 특히 카메라 센서의 특성 및 센서 퓨전 방식이 VILS 환경에 미치는 영향을 중점적으로 분석하였다.
Table 2.
Target vehicles and specifications
| Vehicle A | Vehicle B | |
| Length | 4,425 mm | 4,755 mm |
| Width | 1,875 mm | 1,820 mm |
| Height | 1,640 mm | 1,440 mm |
| Wheelbase | 2,702 mm | 2,865 mm |
| Weight | 1,745 kg | 1,700 kg |
| Camera | Mono | Stereo |
3.2. 평가 시나리오 및 측정지표
ADAS 기능 중 운전자 개입 없이 차량이 자율적으로 제어되는 대표적인 기능인 ACC와 AEB를 주요 평가 대상으로 선정하였다. LKAS도 차선 유지 성능 평가를 위해 포함되었다. 각 기능에 대해 실제 도로 상황을 모사한 표준화된 시나리오를 적용하였다.(7)
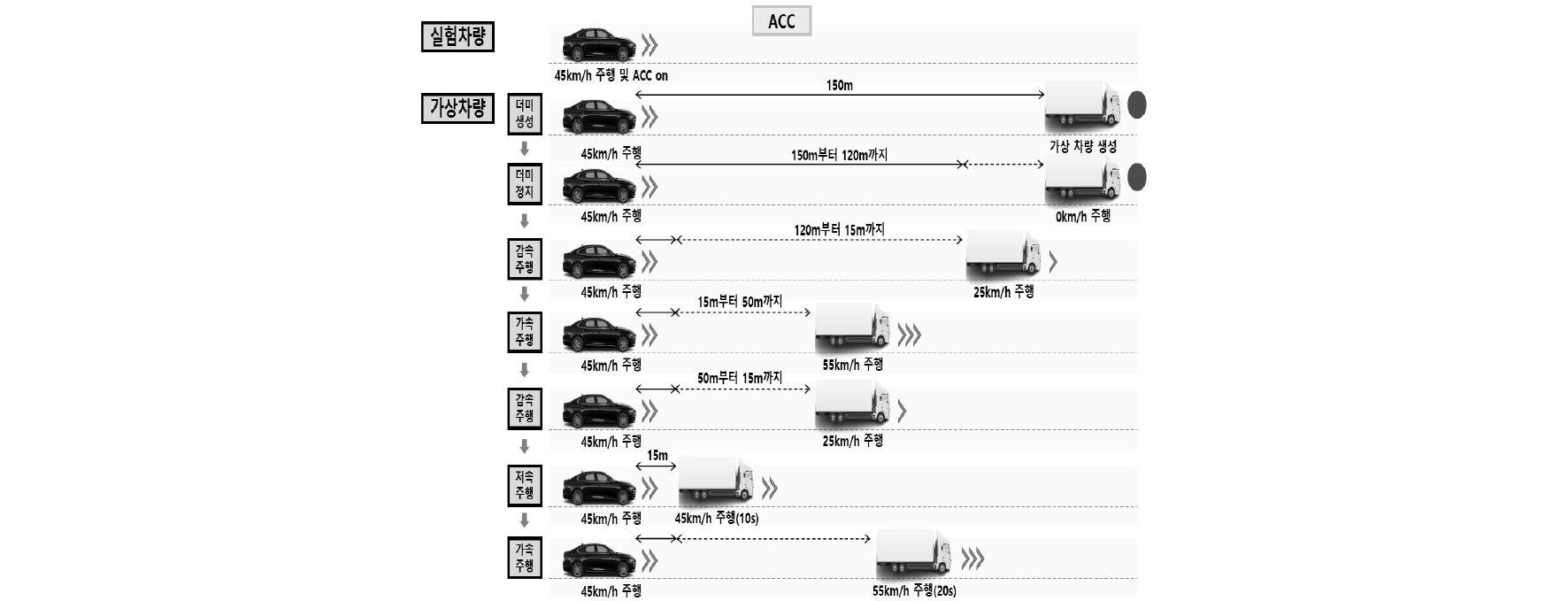
ACC : Fig. 2처럼 시험차량은 45 km/h로 주행하며 ACC On 상태에서 전방 300 m에 가상 차량생성, 이후 120 m 까지 동속 주행하는 시나리오를 3∼5회 시행, 측정 지표는 선행차량과의 적정거리 유지 여부, 속도 제어의 정확성, 시스템 활성화 및 해제 반응시간, 충돌여부 등 이다.
AEB/FCW : Fig. 3과 같이 30 km, 42 km/h의 속도로 시험차량은 주행하며, 전방 300 m부터 120 m 앞에 도달까지 가상 차량 절대속력 0 km/h로 주행하며, 120 m부터 5 m 앞까지 상대속력 -30 km/h로 주행 후 종료. 측정 지표는 FCW, AEB 작동여부, FCW가 AEB보다 먼저 작동 했는지 여부 등이다.

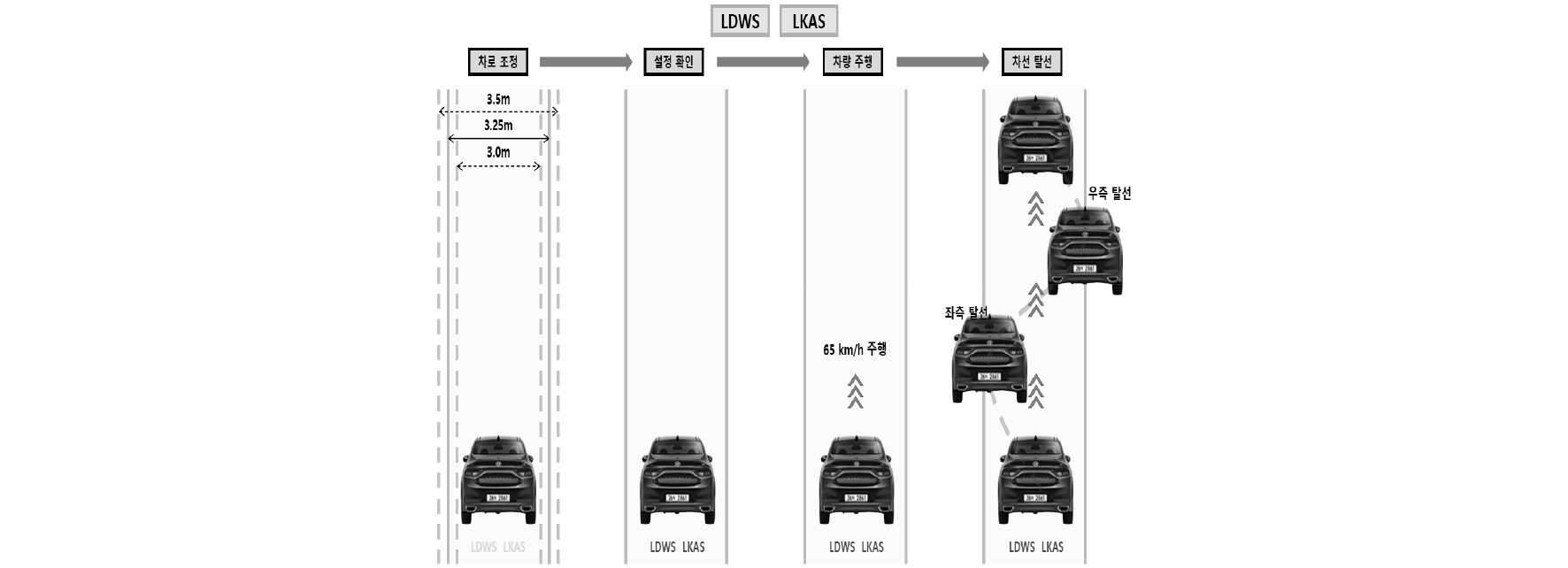
LDEW/LKAS : Fig. 4와 같이 각 속력별(65 km/h, 70 km/h) 2회 시행, 좌/우측 탈선 시도 시나리오를 적용하였다. 측정 지표는 LDWS/LKAS 작동여부, LKAS가 운전자 주의 상태 감지 여부, 차선 이탈 후 차량 스윙현상 여부 등이다.
4. 연구 결과 및 분석
4.1. ACC 기능 성능 비교
A차량은 모든 ACC 시나리오에서 100% 성공률을 보이며 안정적으로 선행 차량과의 적정거리를 유지하고 속도를 제어하였다. 이는 모노 카메라 기반의 객체 인식 및 거리 추정 알고리즘이 KADAS VILS 환경의 2D 영상 정보에서도 충분히 효과적으로 작동함을 확인하였다.
반면, B 차량은 ACC 작동여부가 33.3%에 그쳤으며, 감속, 가속, 저속 주행 유지, 충돌 회피 항목에서는 0%의 성공률을 보였다. 이는 Object Depth 인식불가 및 전방 차량(Truck) 인식 불가로 차간 거리에 따른 거리 간격 조절 기능과 관계없이 주행 차량의 속도에 따라 차간거리 변화라는 특이사항으로 설명된다. 즉, 스테레오 카메라가 2D 디스플레이 기반의 VILS 환경에서 실제와 같은 시차 정보를 충분히 얻지 못하여 정확한 깊이 정보 획득에 실패했고, 전방 가상 차량을 제대로 인식하지 못하면서 ACC 기능이 정상 작동하지 않은 것으로 파악된다.(8)
Table 3.
ACC Function performance comparison results
4.2. AEB/FCW 기능 성능 비교
Table 4는 AEB/FCW 테스트에 대한 분석 자료이다. A차량의 경우 FCW 및 AEB가 모든 상황에서 작동하였으나, B 차량의 경우 FCW는 30 km/h에서는 미작동하였으나 42 km/h에서는 100% 작동하였다. 하지만, AEB는 모든 상황에서 작동하지 않는 것을 미루어보아, 긴급제동의 상황에서는 거리 추정 알고리즘이 작용할 것으로 판단되며, 충돌과 관련이 깊은 보조시스템에서는 Object Depth가 중요한 요인으로 될 것으로 판단된다.
Table 4.
FCW/AEB Function performance comparison results
| Measurement | Vehicle A | Vehicle B |
| FCW Operation | 100% Pass | 50% Pass (only 42 kph) |
| AEB Operation | 100% Pass | 0% Pass |
| FCW operated before AEB | 100% Pass | 0% Pass |
4.3. LDWS/LKAS 기능 성능 비교
LDWS 및 LKAS 기능에서는 두 차량 모드 ACC/AEB와는 다른양상을 보였다. A차량과 B차량 모두 LDWS 작동 여부에서는 Table 5와 같이 100% Pass를 보였고, LKAS 작동여부, LKAS 운전자 주의 감지 여부, 차선 이탈 후 차량 스윙 현상 여부에서는 85.7% 또는 71.4%의 유사한 Pass 비율을 나타냈다. 이는 차선 인식과 관련된 기능이 상대적으로 깊이 정보의 영향을 덜 받거나, 2D 이미지 기반의 차선 인식이 VILS 환경에서도 비교적 견고하게 작동하기 때문으로 해석 할 수 있다.
Table 5.
LDWS/LKAS Function performance comparison results
| Measurement | Vehicle A | Vehicle B |
| LDWS Operation | 100% Pass | 100% Pass |
| LKAS Operation | 85.7% Pass | 85.7% Pass |
| LKAS Driver detection | 85.7% Pass | 85.7% Pass |
| Vehicle swing | 71.4% Pass | 71.4% Pass |
하지만 B 차량의 특이 사항으로 시뮬레이션이 제시하는 차선과 차량이 인식하는 차선이 다른 것으로 추정된다. 이는 LKAS가 운전자에게 차선을 제대로 인식하고 있다고 피드백하지 못하거나, 시스템 내부적으로 혼란을 겪었을 가능성을 시사한다.
이러한 결과들은 KADAS VILS 환경이 모든 종류의 센서 아키텍처에 대해 동일한 수준의 재현성과 신뢰성을 제공하지 못할 수 있음을 명확히 보여준다. 특히 스테레오 카메라의 깊이 인식 방식은 2D 디스플레이 기반의 가상 환경에서 그 한계를 드러내며, 이에 따라 센서 퓨전 로직의 보수성이 시스템의 오작동 또는 성능 저하로 이어질 수 있음을 입증하였다.(9)
5. Discussion
본 연구의 결과는 KADAS VILS와 같은 가상 환경 기반의 ADAS 평가 시스템이 실제 다양한 센서 아키텍처를 가진 차량에 대한 호환성을 확보해야 할 필요성을 강력하게 시사한다. 특히 스테레오 카메라와 같이 깊이 정보를 적극적으로 활용하는 센서 시스템의 경우, VILS 환경의 2D 디스플레이 한계로 인해 실제와 같은 3D 정보 획득이 어렵다는 점이 가장 큰 문제로 드러났다. 이는 B 차량의 ACC 및 AEB 성능에서 명확히 나타났으며, 스테레오 카메라 기반인 ADAS를 장착한 차량의 VILS 평가 결과를 그대로 신뢰하기 어렵다는 함의를 지닌다.
B차량의 경우, 레이더 센서가 전방 장애물을 감지했음에도 불구하고 카메라 센서의 확인이 필요한 ‘AND’ 조건 기반의 센서 퓨전 로직 때문에 ACC의 가속/감속 기능 및 AEB가 작동하지 않았따. 이는 실제 환경에서는 안전성을 높이는 보수적인 접근 방식일 수 있으나, VILS 환경에서 카메라 센서가 충분한 성능을 발휘하지 못할 경우 오히려 안전 기능을 마비시킬 수 있음을 보여준다.
따라서 VILS 환경 설계 시 이러한 퓨전방식의 특성을 고려하고, 각 센서가 시뮬레이션 환경에 어떻게 반응할지 면밀히 분석해야 할 것이다. A차량과 같이 모노 카메라 기반의 차량은 2D 환경에서 비교적 안정적인 성능을 보인 점을 통해, VILS 환경의 특성과 카메라 센서의 정보 처리 방식 간의 상호 작용에 대한 이해가 중요함을 알 수 있다.
또한, 본 연구는 ADAS 평가 표준화에 중요한 시사점을 제공한다. VILS 평가의 신뢰성과 범용성을 높이기 위해서는 단순히 시나리오 구현뿐만 아니라, 다양한 차량의 센서 아키텍처가 VILS 환경과 어떻게 상호 작용하는지에 대한 깊은 이해가 필요하다.
6. 결 론
본 연구는 KADAS 기반 VILS 환경에서 ADAS 기능 평가 시 차량 센서 아키텍처, 특히 모노카메라(A차량)와 스테레오 카메라(B차량) 시스템의 KADAS VILS 환경과의 호환성 및 성능 특성을 실증적으로 분석하였다. 연구 결과를 요약하면 다음과 같다.
1) 모노 카메라 기반의 A 차량은 KADAS VILS 환경에서 ACC 및 AEB 기능에서 높은 성공률을 보이며 안정적인 성능을 나타냈다. 이는 2D 디스플레이 기반의 VILS 환경이 모노 카메라의 작동 원리에 비교적 잘 호환됨을 시사한다.
2) 스테레오 카메라 기반의 B차량은 동일 KADAS VILS 환경에서 ACC 및 AEB 기능에서 현저한 성능 저하를 보였다. 이는 KADAS VILS 환경의 2D 디스플레이 한계로 인한 깊이 정보 인식 문제와, 보수적인 센서 퓨전 로직이 복합적으로 작용한 결과로 분석되며, 스테레오 카메라 시스템과의 호환성에 문제가 있음을 보여준다.
3) LDWS 및 LKAS 기능에서는 A차량과 B차량 모두 유사한 성능을 보였는데, 이는 차선 인식 관련 기능이 깊이 정보에 덜 의존적이며, 2D 이미지 기반의 인식이 KADAS VILS 환경에서 비교적 견고하게 작동함을 의미한다.
4) KADAS VILS 기반의 ADAS 평가 신뢰성을 높이기 위해서는 단순히 시나리오 구현을 넘어, 평가 대상 차량의 센서 아키텍처 특성을 깊이 이해하고, VILS 환경이 이러한 특성을 반영하거나 발생하는 호환성 문제를 극복할 수 있도록 개선되어야 한다.
5) 향후 실제 도로 시험결과와의 비교 분석을 통해 VILS 환경 평가의 정확도와 신뢰성을 검증하는 연구가 병행되어야 할 것이다.
6) 또한, 기존의 레이더 센서 위주의 ADAS 시스템의 인지 능력이 점차 카메라로 변경됨에 따라 KADAS 시스템의 고도화된 성능검증을 위해선 스테레오 카메라를 검증 할 수 있는 시스템 구현을 개발해야 한다.
