

1. 서 론
2. 가상주행환경 고도화 개요 및 선행 연구 고찰
2.1. K-City 가상주행환경 고도화 개요
2.2. 선행 연구 고찰
3. 가상주행환경 고도화
3.1. 가상주행환경 고도화
4. 가상주행환경 고도화 검증
4.1. 가상주행환경 고도화 정확도 평가 기준
4.2. 가상주행환경 정확도 검증
4.3. 도로 주변 구성요소 비교를 통한 검증
4.4. Vehicle-in-the-Loop 테스트를 통한 검증
5. 결 론
1. 서 론
자율주행 시스템 테스트를 위해 다양한 테스트베드가 구축되어 있다. 미국 역시 자율주행 시스템 평가를 위해 M-City라는 자율주행차량 평가용 테스트베드를 구축하였다.
국내에도 자동차안전연구원의 K-City라는 이름의 자율주행 시스템 안전성 평가 테스트베드가 구축되어 있다.(4)
이처럼 실제 테스트베드에서 자율주행 시스템 평가가 진행되고 있으며, 실제 환경에서 구현하기 어려운 시나리오의 경우 시뮬레이션 환경에서의 실험을 진행하고 있다. 본 연구는 Lee et al.(1)의 ‘자율주행시스템 개발을 위한 FMTC 가상주행환경 고도화 개발’의 후속 연구로써 자동차안전연구원의 K-City를 대상으로 계측 데이터로 구성된 OpenDrive 파일로 구성된 도로모델을 자사 프로그램인 CarMaker를 이용하여 고도화 작업을 진행하고자 한다. 또한 실제 K-City와의 비교분석을 통한 유사도 검증과 이를 이용한 Vehicle-in-the-Loop(이하, VIL) 테스트를 통해 자율주행시스템과의 연동성을 검증하고자 한다.
2. 가상주행환경 고도화 개요 및 선행 연구 고찰
본 장에서는 K-City 가상주행환경 고도화 진행 시 이전 연구인 Lee et al.(1)에서 진행한 FMTC 가상주행환경 구축과의 차이점을 확인하고 선행 연구 고찰을 통해 K-City 가상주행환경 고도화 및 VIL 테스트를 통한 자율주행시스템과의 연동성 검증 연구의 배경을 확인하고자 한다.
2.1. K-City 가상주행환경 고도화 개요
K-City 가상주행환경 고도화를 진행하기 앞서 이전 연구로 진행되었던 FMTC 가상주행환경 구축과의 차이점에 대하여 이야기 하고자 한다. FMTC 가상주행환경은 톨게이트, 교통 및 안전 표지판, 신호등 및 차선, 노면 표시 등이 구성되어 있는 FMTC를 가상시뮬레이션 환경에서 활용할 수 있도록 실제와 유사한 가상주행환경으로 구축된 바 있다.
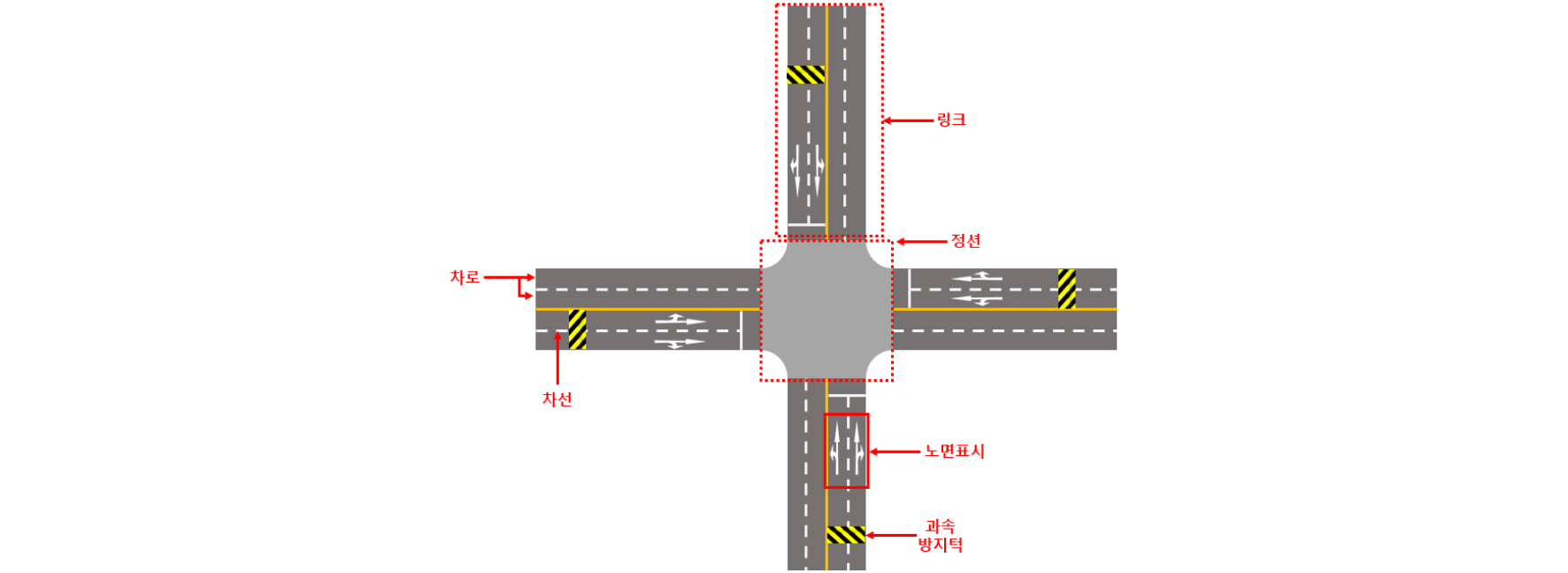
본 연구에서 진행되는 K-City 가상주행환경은 도심부, 교외도로, 고속도로 및 터널 구간, 스쿨존 등의 기존 FMTC 가상주행환경보다 확장된 도로 구성 요소를 포함하고 있다. 이에 따라 K-City 가상주행환경은 FMTC 가상주행환경 고도화 연구의 후속 연구로써, 기존 작업 내용에 더하여 터널 및 건물 등의 정적 객체와 실험구간 분리에 따른 교통 표지판을 포함하고 있다. 따라서 K-City 가상주행환경 고도화 연구 또한 Lee et al.(1)에서 정의한 도로환경모델 구축 시 사용된 용어에 대한 정의를 따른다. 이에 대한 내용은 Fig. 1에서 확인할 수 있다.(1)
2.2. 선행 연구 고찰
국내에 구축되어 있는 자율주행 시스템 테스트베드인 K-City에서의 실차 실험이 지속적으로 이루어지고 있다. 이에 따라 실제 환경과 유사한 K-City 가상주행환경 구축 및 실제 K-City 환경을 활용하기 위한 다양한 연구들이 수행되고 있다.
Lee et al.(1)은 상용 software를 이용하여 서울대학교 시흥캠퍼스에 있는 FMTC를 가상환경에서 활용할 수 있도록 모델링 하였고, 실제 환경과 유사한 센서 거동을 모사하기 위해 가상주행환경 고도화를 진행하였다. Lee et al.(2)은 상용 software를 이용하여 가상 K-City를 구성하였고, 실제 사고 상황을 바탕으로 시뮬레이션 시나리오를 도출하여 Level 3 자율주행차량의 끼어들기 상황 시 측방의 위험상황 인식 범위를 제안하였다. Kim et al.(3)은 자율주행 시스템 개발 및 검증을 위해 가상 K-City를 구축하고, 실제 K-City와 가상 K-City간의 주행 데이터를 비교함으로써 가상 주행 환경의 타당성을 검증하였다. Ko et al.(4)은 실제 K-City 내 다양한 주행환경을 조성하여 가혹 상황에서의 자율주행 시스템 기술 개발이 가능한 시스템을 구축하고자 진행되고 있는 고도화 사업에 대하여 발표한 바 있다. Son et al.(6)은 K-City가상주행환경 중 고속도로에서의 Vehicle-in-the-Loop 테스트를 통한 VILS 시스템을 제안하였다.
기존 진행되었던 연구에서는 K-City의 도로 외형에 집중된 가상 K-City 구축이 주로 이루어졌다. 이에 본 논문에서는 상세 도면 및 실제 K-City 현장 검증을 통하여 실제 K-City 도로 환경과 K-City 가상주행환경이 유사한 환경을 가질 수 있도록 K-City 가상주행환경 고도화를 진행하였다. 또한 고도화가 진행된 K- City 가상주행환경에서 VIL 테스트를 진행함으로써 자율주행시스템 검증에 활용할 수 있음을 확인하였다.
3. 가상주행환경 고도화
본 장에서는 K-City 가상주행환경 고도화 작업에 따른 가상주행환경 구성을 확인하고자 한다. K-City 가상주행환경 구축 및 고도화 작업은 IPG Automotive의 CarMaker를 이용하여 작업이 진행되었다.
3.1. 가상주행환경 고도화
K-City는 자동차전용도로, 도심부도로, 스쿨존과 커뮤니티부, 자율주차시설, 교외도로 부분으로 구성되어져 있다. 또한 신호 및 비신호 교차로, 회전교차로, 도심부의 건물면, 주차시설, 어린이보호구역 등으로 이루어진 실제 도로 환경 및 교통 환경으로 구성되어 있다.(5) K-City 가상주행환경은 이러한 K-City의 실제 도로 환경과 교통 환경을 기반으로 고도화를 진행하였다.
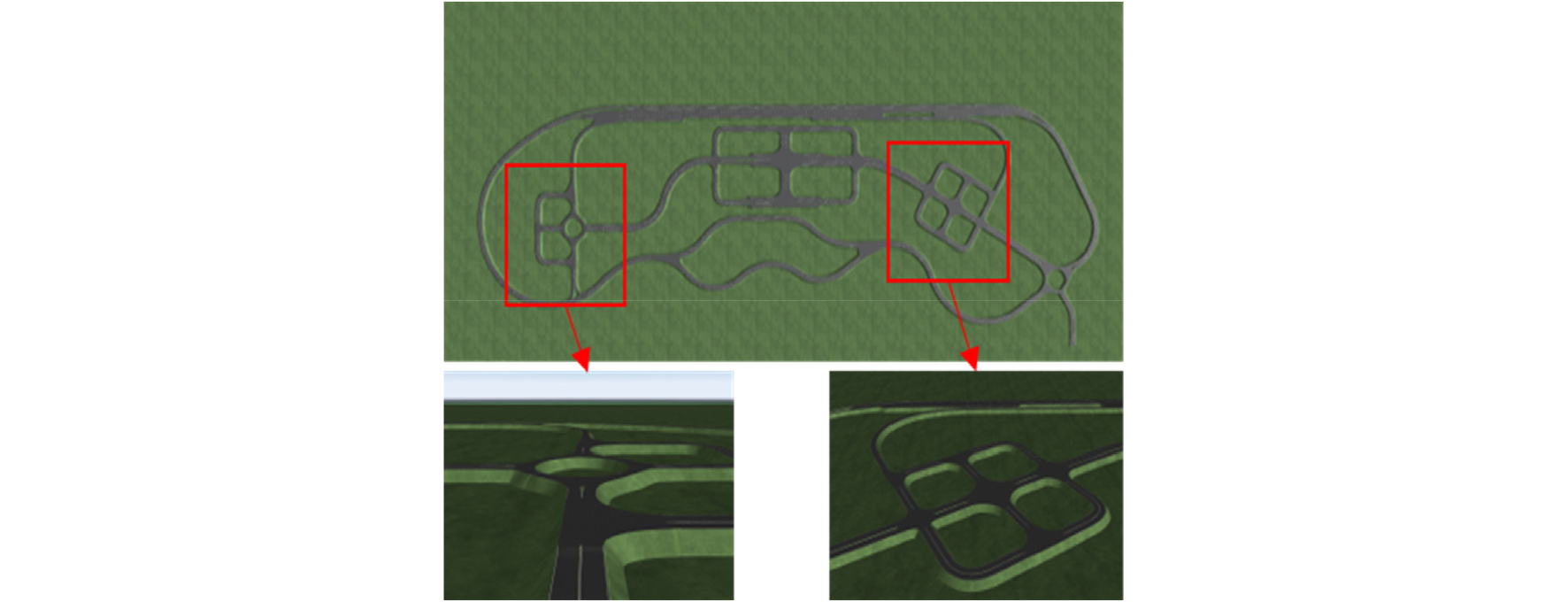
CarMaker환경에서 K-City 가상주행환경 고도화를 진행하기 위해 OpenDrive 파일로 구성된 K-City 도로 모델을 CarMaker 시나리오 편집기 상으로 import하였다. 해당 OpenDrive 도로모델은 자동차안전연구원에서 구축한 도로모델로써 전체적인 도로 형상과 차선, 도로 모델에 대한 GPS 정보가 포함되어 있다. K-City OpenDrive 도로 모델을 CarMaker에 import한 결과는 Fig. 2와 같다.
Import된 K-City 가상주행환경을 CarMaker의 시나리오 편집기를 이용하여 주차장, 인도, 노면 표시, 표지판 등을 추가하여 고도화를 진행하였다. 노면 표시 및 차선의 경우 K-City 도면을 참고하여 구성하였다. 또한 안전, 교통 표지판과 신호등 및 건물과 터널 등 정적 객체를 추가함으로써 K-City 가상주행환경 고도화를 진행하였다. Fig. 3과 같이 고도화된 K-City 가상주행환경을 확인할 수 있다. 기존 OpenDrive 도로모델만 import하였을때와는 달리 정적 시설물 및 주차장이 추가된 것을 확인할 수 있다.

4. 가상주행환경 고도화 검증
본 장에서는 K-City 가상주행환경 고도화 도로 모델과 K-City와의 유사도 검증을 진행하고, VIL 테스트를 통한 자율주행시스템 검증 활용을 확인한다. 이를 위해 실제 K-City 환경과 K-City 가상주행환경 고도화 모델을 비교하고 VIL 테스트를 통해 자율주행시스템 검증 활용성을 확인하였다.
4.1. 가상주행환경 고도화 정확도 평가 기준
검증 기준은 위치 정확도, 형상 정확도, 내용 정확도, 기능 정확도로 구분하였으며 각 정확도 별 점수 합산을 통해 항목별 정확도 유사도 비율을 설정하였다.(1) 해당 기준은 Lee et al.(1)의 ‘자율주행시스템 개발을 위한 FMTC 가상주행환경 고도화 개발’의 기준을 참고하였다. 이에 대한 상세한 내용은 Table 1에서 확인할 수 있다. 가상주행환경 고도화 도로 모델에 대한 유사도 검증 항목 중 타 항목과 내용이 겹치는 경우 별도 검증 항목으로 설정하지 않았으며, 검증 항목으로 사용되지 않은 정확도 항목은 기본 배점 10점으로 구성하였다. 가상주행환경 고도화 도로 모델 정확도 검증은 검증 유형별 90점 이상의 유사도를 목표로 하고 있다.
Table 1.
Virtual driving environment verification criteria(1)
| 위치 정확도 (a) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 형상 정확도 (b) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 내용 정확도 (c) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 기능 정확도 (d) | A | 10 |
| B | 7 | |
| C | 5 | |
| D | 0 | |
| 검증별 정확도 | (a*4)+(b*1.5)+(c*3)+(d*1.5) = 100 | |
4.2. 가상주행환경 정확도 검증
4.2절에서는 K-City와 K-City 가상주행환경의 도로 형상과 도로 구성항목을 비교하였다. 이를 통해 도로모델의 정확도 검증을 진행하였고, 검증대상은 K-City 가상주행환경 고도화 도로 모델의 교차로와 차로의 폭 및 개수, 도로 모델의 높이 정보, 노면 표시, 차선 정보이다.
4.2.1. 도로 형상 검증
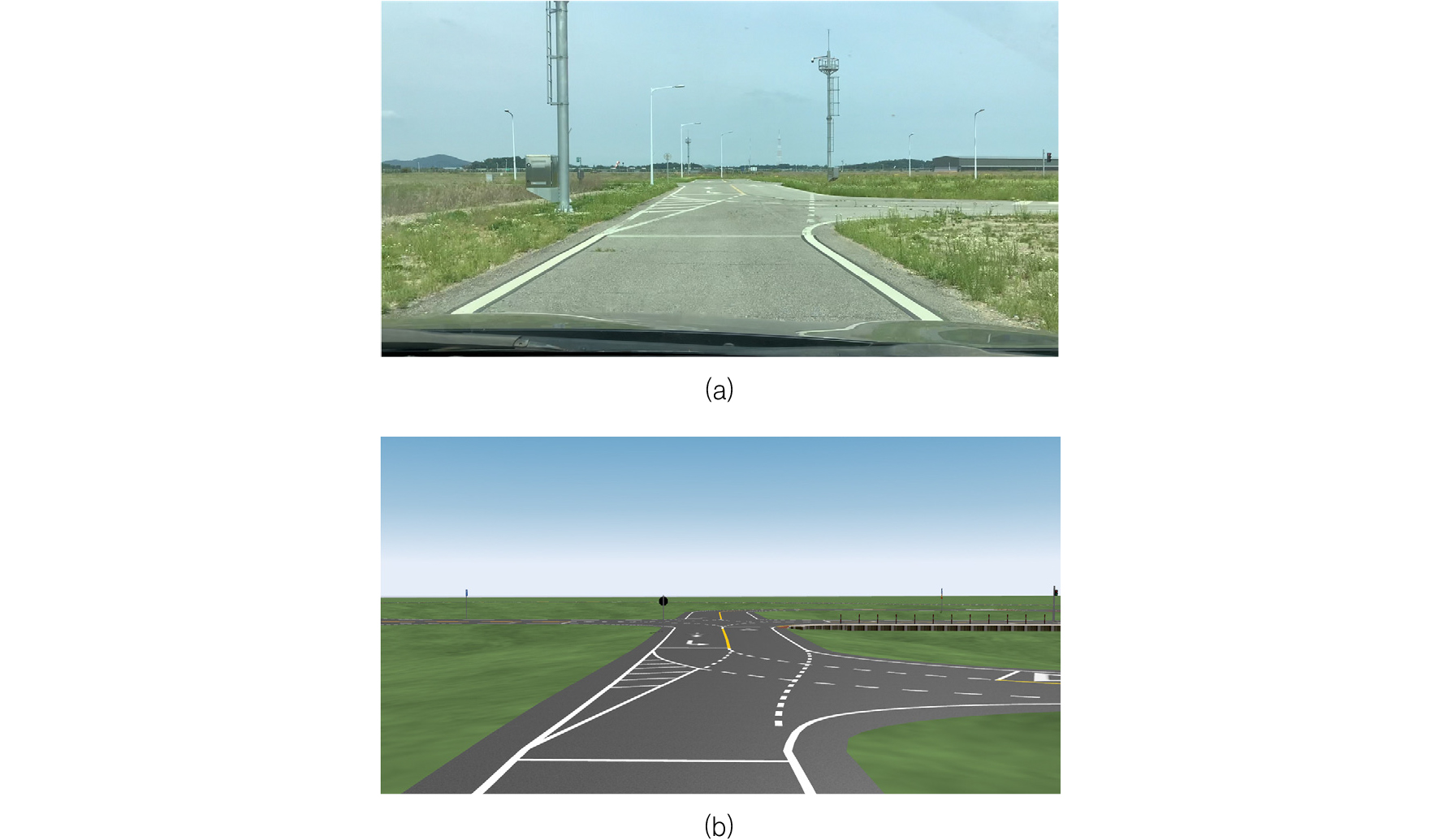
도로 형상 검증은 Fig. 4와 같이 K-City의 도로 형상을 K-City 가상주행환경과 비교하였다. 또한 K- City 상세 도면을 이용하여 위치 정확도, 형상 정확도, 내용 정확도, 기능 정확도 검증을 진행하였다. 각 정확도 항목의 상세 기준은 Table 2에서 확인할 수 있다.
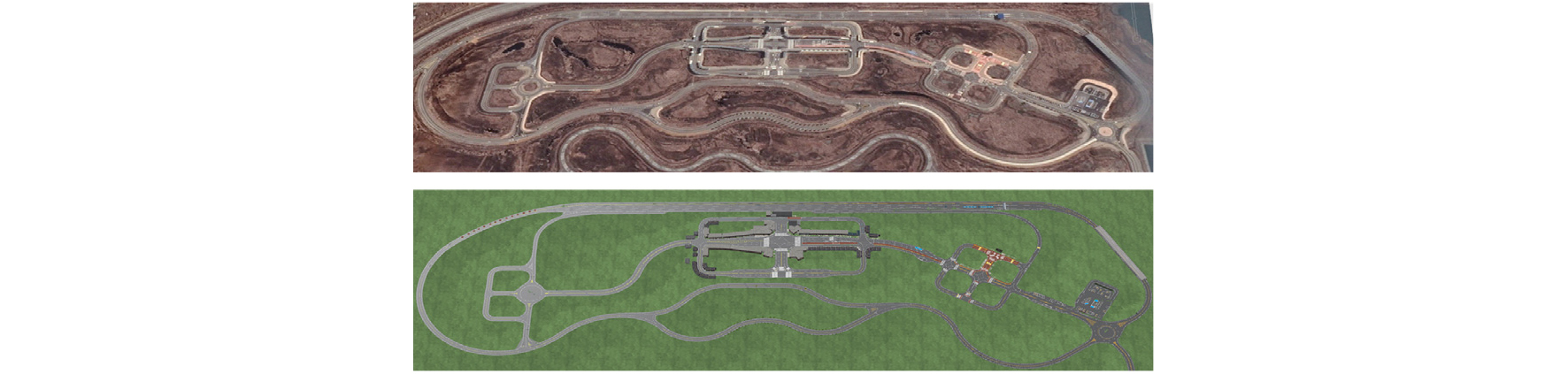
Table 2.
Road elements verification criteria
위치 정확도의 경우 고정밀지도를 기반으로 구성한 kml 파일과 구성된 K-City 가상주행환경 도로모델의 구글어스 내 출력되는 GPS 데이터를 비교하여 확인하였다. K-City와 K-City 가상주행환경의 동일한 지점에서의 위치 좌표를 확인하였다. 그에 따라 K-City와 K-City 가상주행환경의 위치 편차는 5 cm 이내임을 확인하였다. 형상 정확도의 경우 차로 폭과 도로 모델의 높이 편차를 기준으로 하였다. 차로 폭의 경우 일부 구간에서 9 cm 이내의 편차를 확인하였다. 높이 정보의 경우 주차장 내 경사 구간을 확인하였으며, K-City 도면 및 K-City 와의 높이 편차는 6 cm 이내임을 확인하였다. 내용 정확도의 경우 K-City 가상주행환경 내 주행 차로의 개수가 K-City와 차이가 없음을 확인하였다. 이때 주행 차로는 실제 차량이 주행할 수 있는 구간 및 버스전용차로를 포함한다. 기능 정확도의 경우 구성된 주행 차로에서 차량이 정상 주행이 가능한지를 중점으로 확인하였다. K-City 가상주행환경의 전 구간 시뮬레이션이 가능한 것으로 확인하였다. 이에 따른 도로 형상 검증의 결과는 Table 3과 같다.
4.2.2. 노면 표시 검증
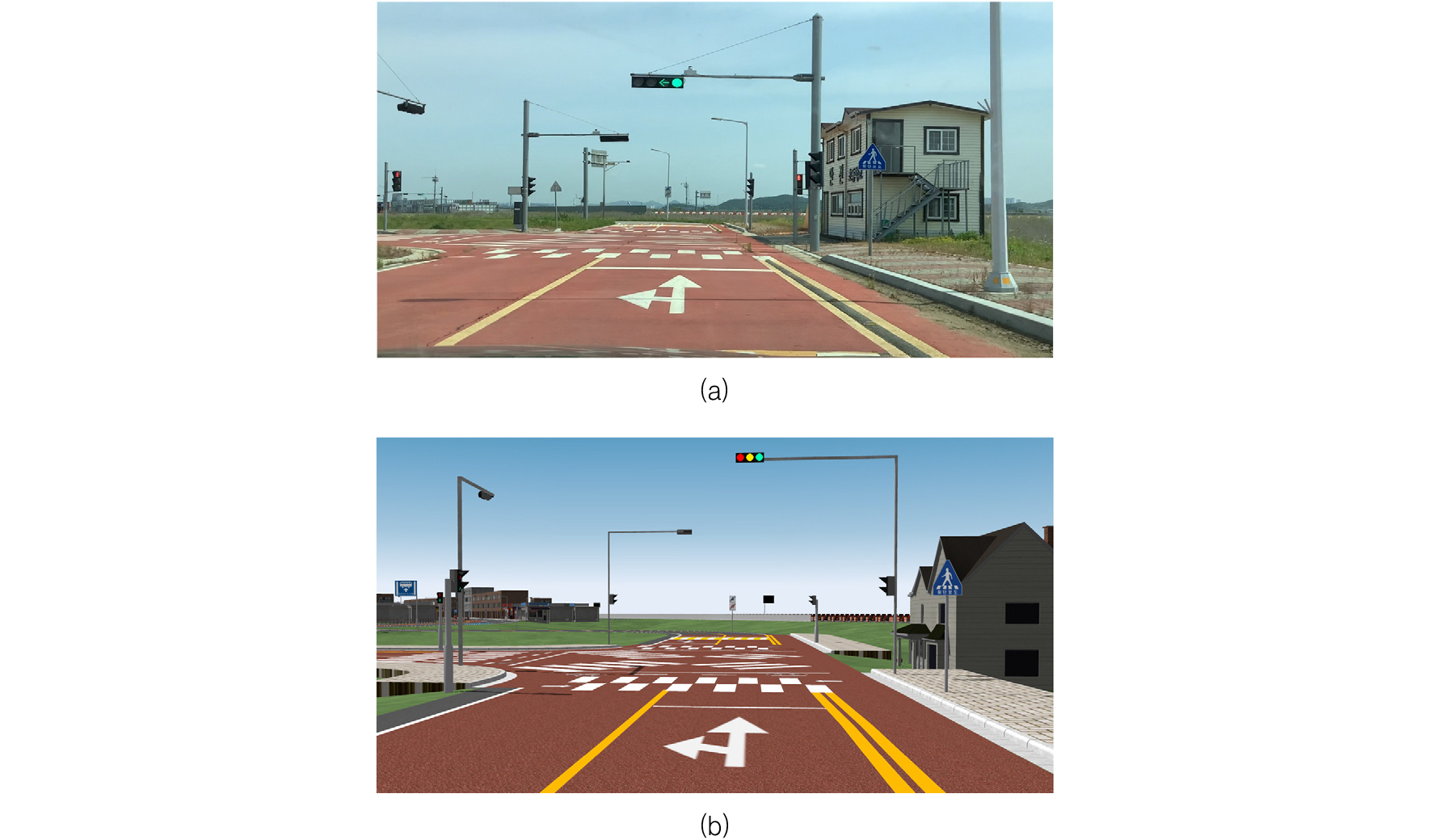
노면 표시 검증은 K-City 가상주행환경 내 구성된 도로 노면 내 화살표 및 어린이보호구역, 안내 문구 등에 대한 내용을 K-City 형상과 비교하였고, 그에따른 위치 정확도, 형상 정확도, 내용 정확도 검증을 진행하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 4에서 확인할 수 있다. 검증 예시는 Fig. 5와 같다.
Table 4.
Road painting verification criteria
위치 정확도의 경우 K-City 도면과 K-City 현장사진을 활용하여 비교하였으며, 노면 표시의 경우 일부 구간에서 위치 편차 8 cm 이내임을 확인하였다. 형상 정확도의 경우 K-City와 비교하였을 때 흰색, 파란색, 노란색 등 노면 표시에 대한 색상 구분이 올바르게 표시 되었는가에 대한 내용을 중심으로 확인하였다. 이에 대하여 K-City와 K-City 가상주행환경은 노면 표시 색상 구분에 대하여 차이가 없음을 확인하였다. 내용 정확도의 경우 노면 표시가 안내하는 내용이 K-City와 동일한지에 대한 내용을 확인하였다. 이때 화살표 및 안내 문구, 횡단 보도 등의 노면 표시가 K-City와 동일하게 표시되었음을 확인하였다. 기능 정확도는 노면 표시가 차량에 올바른 정보를 전달하는지를 중점으로 확인하고자 하였다. 다만 기능 정확도의 경우 노면 표시 정확도 검증에서 내용 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도를 확인하지 않았다. 4.1절에서 이야기한 것과 같이 별도로 정확도를 확인하지 않은 기준에 대해서 정확도 기본 점수를 10으로 설정하였다. 이에 따른 노면 표시 검증의 결과는 Table 5와 같다.
4.2.3. 차선 표시 검증
차선 표시 검증은 K-City 가상주행환경 내 구성된 차선에 대한 내용을 K-City 형상과 비교하였고, 그에 따른 위치 정확도, 형상 정확도를 확인하였다. 이때 차선 표시 검증에서는 차로 내 안전지대 및 교차로 유도선을 포함한다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 6에서 확인할 수 있다. 형상 정확도의 기본 3색은 흰색, 파란색, 노란색을 의미한다. 검증 예시는 Fig. 6과 같다.
Table 6.
Road marking verification criteria
위치 정확도는 K-City 도면과 K-City 현장 사진을 활용하여 검증하였다. 이를 통해 차선 표시의 경우 일부 구간에 대하여 위치 편차 9 cm 이내임을 확인하였다. 형상 정확도의 경우 K-City와 비교하여 흰색, 파란색, 노란색 등의 차선 표시가 올바르게 구성되어 있는 것을 확인하였다. 내용 정확도와 기능 정확도는 형상 정확도와 동일한 기준을 포함하고 있다. 그에 따라 내용 정확도의 기능 정확도에 대한 별도의 정확도를 확인하지 않았다. 4.1절에서 이야기한 것과 같이 별도로 정확도를 확인하지 않은 기준에 대해서 기본 점수 10을 설정하였다. 차선 표시 검증의 결과는 Table 7과 같다.
4.3. 도로 주변 구성요소 비교를 통한 검증
4.3절에서는 K-City와 K-City 가상주행환경의 구성요소 중 도로 구성 항목을 제외한 요소에 대한 비교를 진행하였다. 그에 따라 K-City 가상주행환경의 구성 요소 중 교통 및 안전 표지판, 터널 및 건물 등의 정적 객체, 신호등, 인도, 과속방지턱 등에 대한 정확도 검증을 진행하였다.
4.3.1. 교통 및 안전 표지판 검증
교통 및 안전 표지판 검증은 K-City 가상주행환경 내 구성된 어린이보호구역, 구간 안내 등을 위한 표지판 및 교통 표지판을 K-City 형상과 비교하였고, 그에따른 위치 정확도, 형상 정확도, 내용 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 8에서 확인할 수 있다. 검증 예시는 Fig. 7과 같다.
Table 8.
Traffic signs verification criteria

위치 정확도는 K-City 도면과 고정밀지도, 그리고 K-City 현장 사진을 활용하여 검증을 진행하였다. 이를 통해 교통 및 안전 표지판의 위치 편차가 7 cm 이내임을 확인하였다. 형상 정확도의 경우 154개의 표지판에 대하여 검증을 진행하였으며, K-City와 유사한 색상과 동일한 도형의 형상을 가지고 있는 것을 확인하였다. 내용 정확도는 K-City 가상주행환경에 구현된 154개의 교통 및 안전 표지판에 대하여 검증을 진행하였으며, K-City 내 교통 및 안전 표지판에 구성되어 있는 내용과 동일한 안내 내용을 가지고 있음을 확인하였다. 기능 정확도의 경우 교통 및 안전 표지판이 주행 중인 차량에 정확한 정보를 전달할 수 있는가에 대한 내용을 확인하고자 하였다. 이러한 내용은 내용 정확도와 동일한 기준을 포함하기 때문에 별도의 정확도는 확인하지 않았고, 4.1절에서 이야기 했던 것과 같이 검증하지 않은 항목인 기능 정확도에 대하여 기본 점수 10을 부여하였다. 이에 따른 교통 및 안전 표지판 검증 결과는 Table 9와 같다.
4.3.2. 신호등 검증
신호등 검증은 K-City 가상주행환경에 구현된 신호등의 모양과 신호 현시 및 신호등의 설치 위치를 K-City 현장 사진 및 고정밀지도와 비교하였고, 그에따른 위치 정확도, 형상 정확도, 기능 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 10에서 확인할 수 있다. 검증 예시는 Fig. 8과 같다.
Table 10.
Traffic lights verification criteria
위치 정확도의 경우 K-City 도면과 K-City 현장 사진, 고정밀지도를 활용하였다. K-City 가상주행환경 내 구성된 74대의 신호등 중 보행자 신호등의 위치 편차가 3 cm 이내인 것을 확인하였다. 형상 정확도의 경우 차량 신호등은 기본 3색으로 구성되어 있고, 보행자 신호등은 빨간색, 초록색의 기본 신호만 구성되어 있는 것을 확인하였다. 이때 신호등의 기본 3색은 초록색, 노란색, 빨간색을 의미한다. 또한 K-City 가상주행환경에서 구성된 신호등의 경우 좌회전 신호 및 보행자 신호의 시간표시가 미비함을 확인하였다. 내용 정확도는 K-City 가상주행환경 내 구성된 신호등이 가지고 있는 신호에 대한 내용을 확인하고자 하였다. 이때 이러한 기준은 앞서 확인한 형상 정확도와 동일한 기준을 포함하고 있기 때문에 내용 정확도에 대하여 별도의 정확도는 확인하지 않았다. 기능 정확도의 경우 신호등으로써 차량과 보행자에게 제공하는 신호 현시를 중점으로 확인하였다. 이에 대하여 K-City의 신호 현시에 대해 구체화된 자료가 없어 동일하게 구현하지 못하였으나, K-City 가상주행환경 내에서 사용자가 시나리오에 맞게 수정을 할 수 있도록 신호 현시를 구성하였다. 이에 따른 신호등 검증 결과는 Table 11과 같다.
4.3.3. 기타 정적 객체 검증
기타 정적 객체 검증은 K-City 가상주행환경 내에 구성되어 있는 인도, 과속방지턱, 중앙분리대, 가드레일, 건물, 터널 등을 대상으로 하였다. K-City 현장 사진과 K-City 도면을 이용하여 K-City 가상주행환경 내 구성된 정적 객체와의 위치 정확도, 형상 정확도를 확인하였다. 각 정확도 항목의 상세 기준은 아래와 같이 Table 12에서 확인할 수 있다.
Table 12.
Static object verification criteria
| 위치 정확도 | 위치 편차 10 cm 이내 | 10 |
| 위치 편차 20 cm 이내 | 7 | |
| 위치 편차 30 cm 이내 | 5 | |
| 위치 편차 35 cm 이상 | 0 | |
| 형상 정확도 | 형태 및 색상 차이 5% 이내 | 10 |
| 형태 및 색상 차이 15% 이내 | 7 | |
| 형태 및 색상 차이 25% 이내 | 5 | |
| 형태 및 색상 차이 28% 이상 | 0 | |
| 내용 정확도 | 기본 점수 | 10 |
| 기능 정확도 | 기본 점수 | 10 |
검증 예시는 Fig. 9와 Fig. 10과 같으며, 해당 그림 속에서 건물, 중앙분리대, 톨게이트, 차선 유도봉 등을 확인할 수 있다.
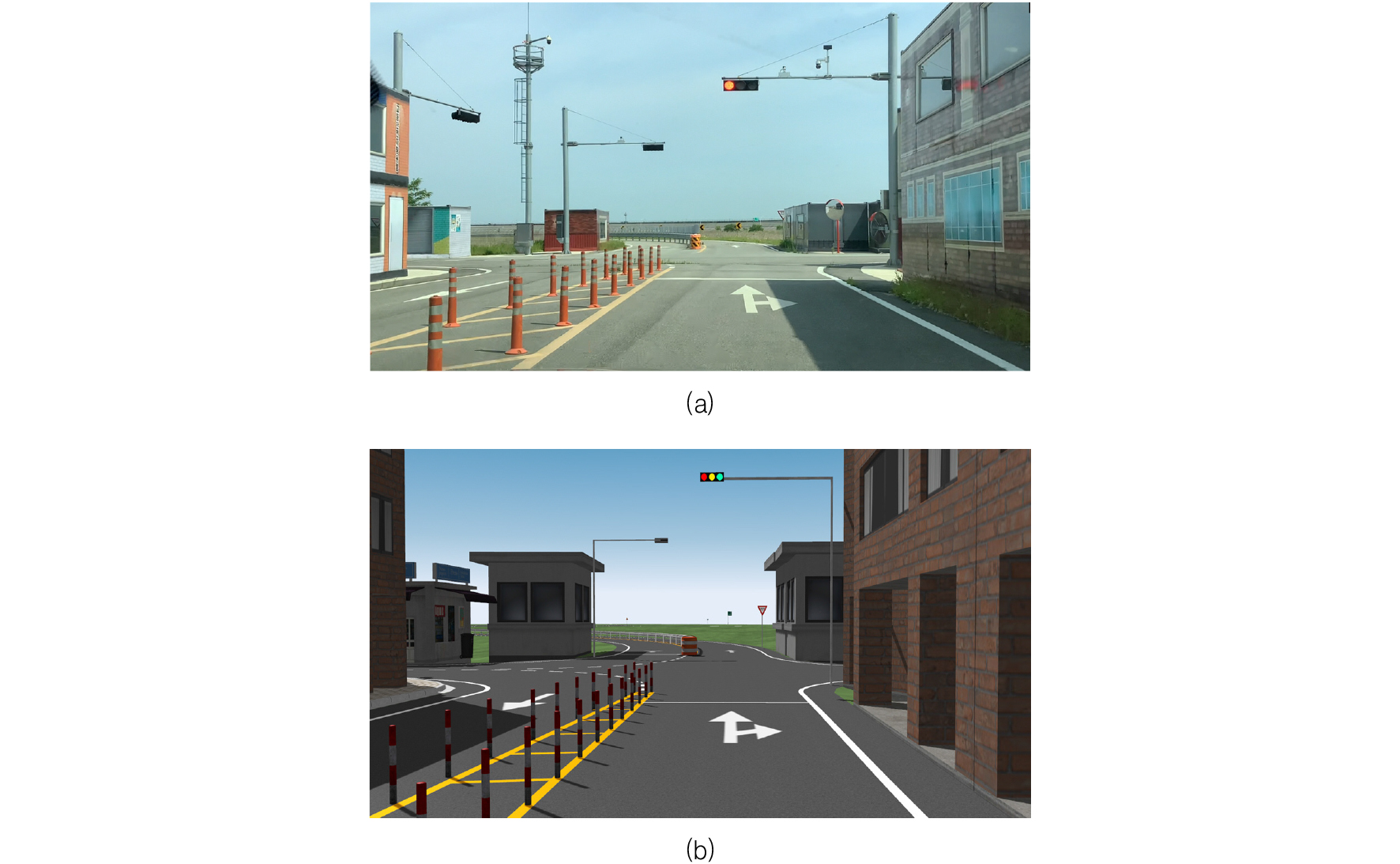

위치 정확도의 경우 K-City 도면과 K-City 현장 사진, 고정밀지도를 활용하였으며 도로 모델 내에 있는 정적 객체의 경우 위치 편차가 6 cm 이내임을 확인하였다. 형상 정확도 검증과 관련하여 중앙분리대 1건에 대하여 철망과 가드레일형식의 중앙분리대가 아닌, 철망이 없는 가드레일 형식의 중앙분리대로 구성된 것을 확인하였다. 또한 K-City 도심부 건물의 경우 자율주행시스템의 센서 방해를 위한 정적객체로써 K- City와 동일한 위치에 센서 방해를 위한 건물이 구성되어 있는지를 중점으로 확인하였다. 또한 CarMaker에서는 철망이 포함되어 있는 중앙분리대 모델은 지원하고 있지않으며, 이에 센서 거동 일치를 위해 동일한 재료를 사용하는 가드레일 형식의 중앙분리대 모델로 구현되었음을 확인하였다. 내용 정확도의 경우 형상 정확도 항목과 동일한 기준을 포함하고 있으며, 기능 정확도 또한 자율주행시스템이 정적 객체를 인식함에 있어 K-City에서의 유사한 센서 거동을 나타낼 수 있는가를 확인하고자 하였다. 이러한 내용 또한 형상 정확도와 동일한 기준을 포함하고 있기 때문에 별도의 정확도는 확인하지 않았다. 이에 따른 정적 객체 검증 결과는 Table 13과 같다.
4.4. Vehicle-in-the-Loop 테스트를 통한 검증
4.4절에서는 K-City 가상주행환경을 이용하여 실제 자율주행시스템과의 연동성을 검증하였다. 실제 차량 모델을 이용한 VIL 테스트를 통해 K-City 가상주행환경을 이용한 자율주행시스템 검증 활용성에 대한 검증을 진행하였다.
4.4.1. VIL 테스트 환경 구축
Vehicle-in-the-Loop는 실제 자율주행차량을 이용하여 가상주행환경에서 시뮬레이션을 진행하는 것으로, 위험도가 높은 시나리오 등을 시뮬레이션 할 때 활용할 수 있는 방법 중 하나이다. K-City 가상주행환경을 이용한 VIL 테스트 환경은 Fig. 11과 같이 구성하였다.

가상주행환경에서 사고 유발차량 및 센서 방해 차량과 보행자를 이용한 시나리오를 구성하게 된다. 이때 가상주행환경에서 사용되는 자차량은 실제 자율주행시스템 차량에서 사용되는 센서와 동일한 사양을 가질 수 있도록 구성하여 실제 자율주행시스템의 로직이 작동하는데 문제가 없어야 한다. VIL 환경에서 가상주행환경에서 구성된 다양한 시나리오를 통한 센서 데이터와 가상주행환경 내에서 자차량이 주행 중인 위치에 대한 GPS 정보를 연동된 실제 자율주행시스템 차량에 보내주게 되고, 이를 이용하여 실제 자율주행시스템 차량에서는 해당 위치를 주행 하는 것으로 인식하게 되고 자율주행시스템 로직이 작동하게 된다.
K-City 가상주행환경에서의 VIL 테스트를 위해 구성된 가상주행환경 차량에는 Lidar 센서와 Camera 센서가 사용되었다. K-City와 K_City 가상주행환경 모두 동일한 위치에서 주행 할 수 있도록 구성하였으며, 이를 통해 위치 정확도 및 실제 자율주행시스템 차량 실험에 대한 활용성을 검증하였다.
4.4.2. VIL 테스트 검증 결과
구축된 CarMaker VIL을 통해 K-City 가상주행환경의 스쿨존 및 도심부에서 5가지 시나리오를 진행하였다. 진행된 5가지 시나리오를 통해 K-City 가상주행환경을 실제 자율주행 시스템 검증에 활용할 수 있음을 확인하였다.
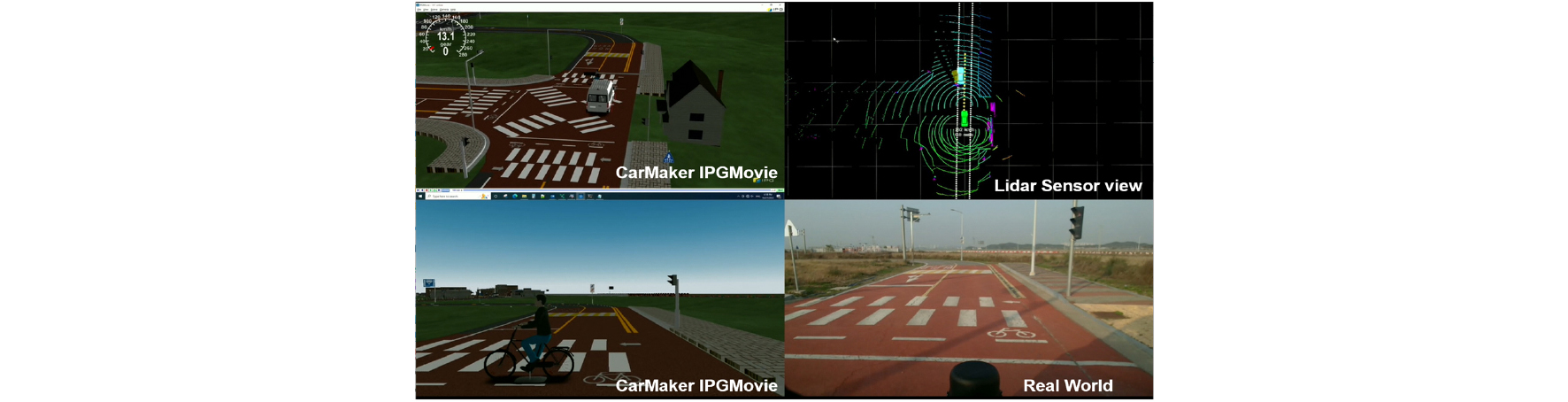
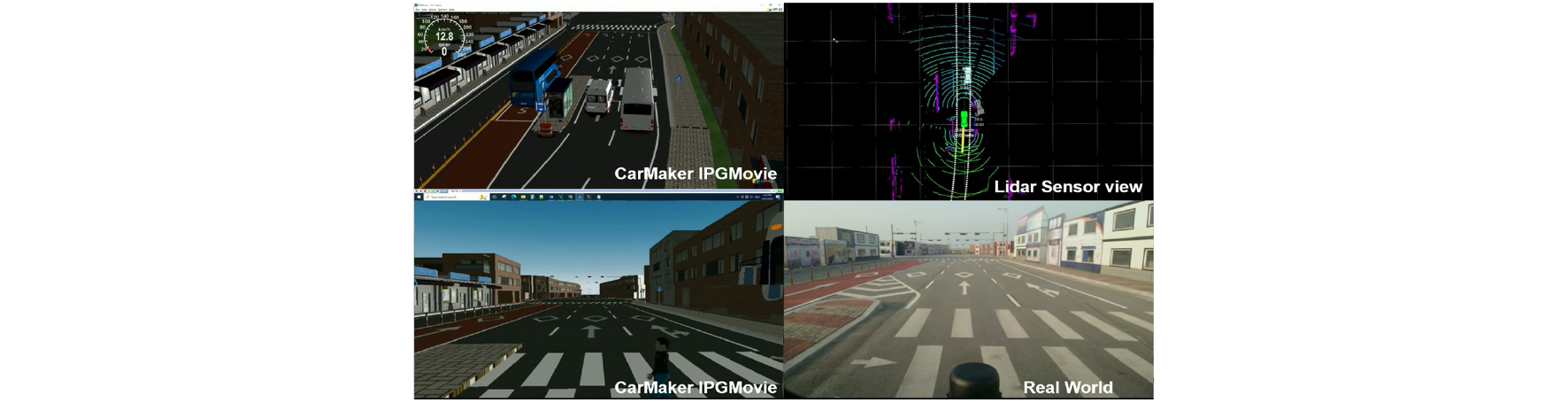
첫 번째 시나리오는 K-City 가상주행환경에서 자전거 보행자가 출현하는 시나리오로써, 실제 환경에서 자전거 보행자가 지나가지 않았음에도 VIL 환경이 구축된 실제 자율주행시스템 차량이 자전거 보행자를 인지하고 멈추는 것을 확인하였다. 이에 따른 검증 결과는 Fig. 12와 같이 확인할 수 있다. 실제 환경에서는 자전거 보행자가 없지만, K-City 가상주행환경에서 자전거 보행자를 감지하여 실제 자율주행시스템 차량이 멈추는 것을 확인할 수 있다.
두 번째 시나리오는 보행자 횡단 시나리오로써, K-City 중앙 버스전용차로와 인접한 횡단보도에서 보행자가 횡단할 때 갑자기 나타나는 보행자의 움직임을 감지하고 실제 자율주행시스템 차량이 감속하여 사고를 회피하는 것을 확인하였다. 이에 따른 검증 결과는 Fig. 13과 같이 확인할 수 있다. 실제 환경에서는 보행자가 없지만, K-City 가상주행환경에서 보행자를 감지하여 실제 자율주행시스템 차량이 멈추는 것을 확인할 수 있다.
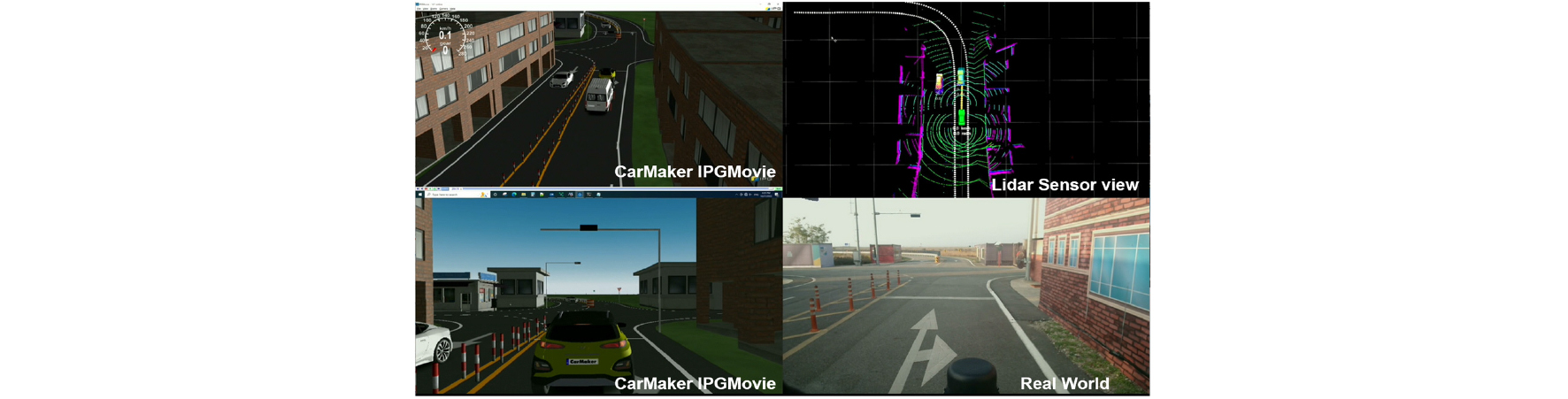
세 번째 시나리오는 교차로 좌회전 시나리오로써, 자율주행시스템 차량이 정차되어 있는 차량을 인지하고 제동 후 전방 차량이 출발한 후 교차로에서 좌회전을 진행하는 것을 확인하였다. 이에 따른 검증 결과는 Fig. 14와 같이 확인할 수 있다. 실제 환경에서는 정차 차량이 없지만, K-City 가상주행환경에서 정차 차량을 감지하여 실제 자율주행시스템 차량이 멈추는 것을 확인할 수 있다.
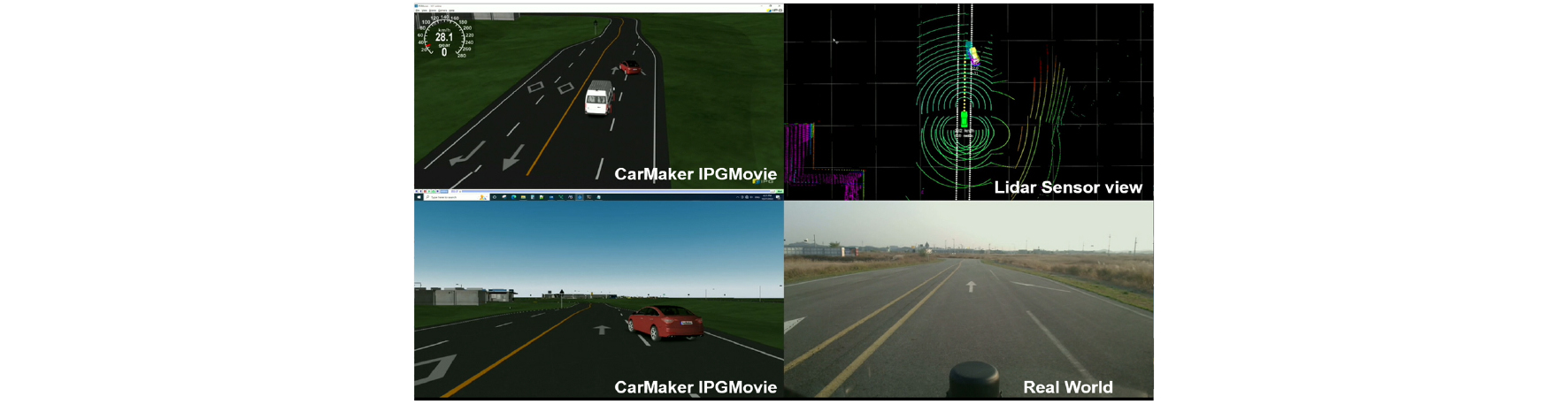
네 번째 시나리오는 끼어들기 차량에 의한 긴급 제동 시나리오로써, 자율주행시스템 차량의 전방에 사고 유발차량이 끼어들기를 진행하게 된다. 이때 자율주행시스템 차량은 사고 유발 차량을 감지하고 추돌 전 감속하여 사고를 회피하는 것을 확인하였다. 이에 따른 검증 결과는 Fig. 15와 같이 확인할 수 있다. 실제 환경에서는 끼어들기 차량이 없지만, K-City 가상주행환경에서 끼어들기 차량을 감지하여 실제 자율주행시스템 차량이 감속하는 것을 확인할 수 있다.
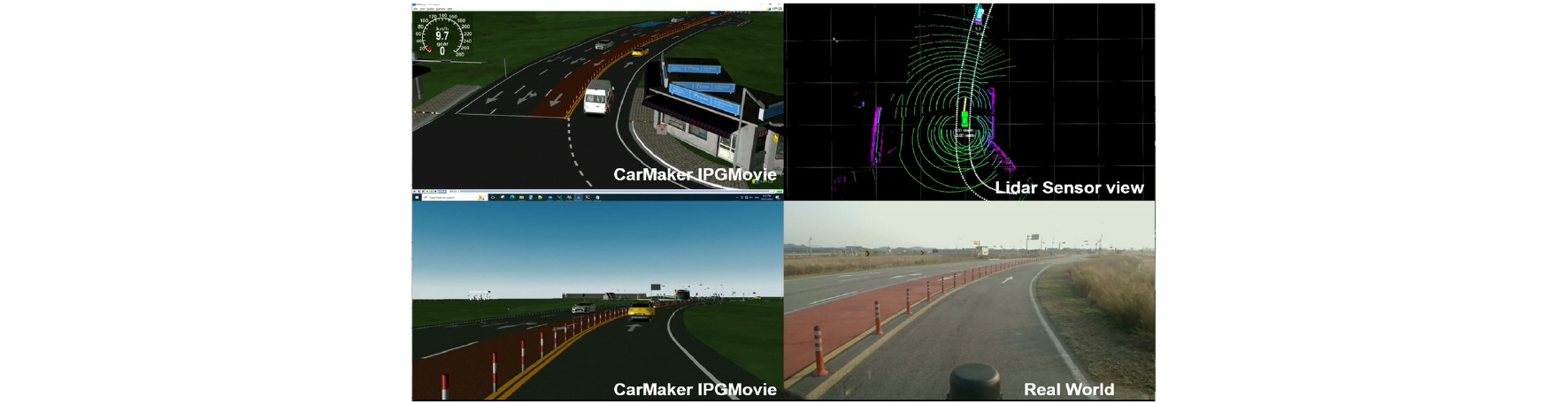
다섯 번째 시나리오는 전방 저속주행 차량에 의한 ACC 시나리오로써 자율주행시스템 차량이 교차로에서 우회전 후 전방에 저속 주행하는 차량을 감지하여 전방 차량의 속도에 따라 주행하는 것을 확인하였다. 이에 따른 검증 결과는 Fig. 16과 같이 확인할 수 있다. 실제 환경에서는 전방 저속 주행 차량이 없지만, K-City 가상주행환경에서 전방 저속 주행 차량을 감지하여 실제 자율주행시스템 차량이 감속하는 것을 확인할 수 있다.
5. 결 론
본 연구에서는 K-City에 대하여 가상주행환경 구축후 고도화를 진행하였으며, 이를 바탕으로 K-City와의 유사도 검증을 진행하였다. 또한 고도화된 K-City 가상주행환경 내에서 Vehicle-in-the-Loop 테스트를 진행함으로써 자율주행시스템 검증 활용성을 확인하였다. 본 연구의 결과를 요약하면 다음과 같다.
1) 측정 데이터를 기반으로 생성된 K-City OpenDrive 파일을 이용하여 CarMaker 내에서 K-City 가상주행환경 구성.
2) 구성된 K-City 가상주행환경을 고도화 하여 K-City와 같은 환경 구성.
3) 고도화된 K-City 가상주행환경과 K-City를 비교하여 유사도 90점 이상을 확인함으로써 자율주행시스템 개발 시 활용 가능함을 확인.
4) 고도화된 K-City 가상주행환경에서의 Vehicle-in-the-Loop 테스트를 통하여 실제 자율주행시스템 차량과의 연동성을 확인.
