

1. 서 론
2. 시험 및 평가 시나리오
2.1. Euro NCAP의 Test Protocol
2.2. Cut-out 기반 AES Test Protocol 제안
2.3. 제안 시나리오의 VUT 평가방법
3. 시뮬레이션
3.1. 환경 구성
3.2. 차량 구성
3.3. 자율주행 stack 구성
3.4. 시뮬레이션 결과
4. 결 론
1. 서 론
최근 자율주행 기술이 발달함에 따라 운전자의 개입이나 수동 조작이 필요하지 않은 완전자율주행을 위한 차량이 개발되고 있으며, 안전한 주행을 위한 여러 ADAS(Advanced Driver Assistance System)들 또한 함께 개발 및 고도화되어 양산차에 적용되고 있다. 관련하여 Shin은 차량간(V2V, vehicle to vehicle) 통신을 이용하여 충돌 위험성을 낮추는 방법을 제안하였고,(1) G Li는 새로운 위험 평가 기반의 충돌 회피 의사결정 알고리즘을 제안(2)하는 등 충돌 회피와 안전한 주행을 위한 연구도 활발히 진행되고 있다. 이에 IIHS(Insurance Institute for Highway Safety)와 Euro NCAP(European New Car Assessment Program)등에서는 AEB(Autonomous Emergency Braking), LSS(Lane Support System)등 양산차에 적용되는 충돌 회피 기술을 포함해 다양한 안전 보조 기능의 성능평가 프로토콜을 제시하고 있다.(3,4) IIHS에서 실시한 FCW(Forward Collision Warning)와 AEB의 효과에 관한 연구를 보면, AEB와 FCW가 모두 장착된 차량의 경우 그렇지 않은 차량에 비해 후방 추돌사고율이 50% 감소하였고, 모든 차량에 FCW와 AEB가 설치될 경우 연간 미국 내 백만 건 이상의 사고가 줄어들 것으로 예상하였다.(5) Euro NCAP 또한 AEB가 장착된 차량은 후방 추돌사고를 38% 감소시키는 효과가 있는 것으로(6) 발표하여 AEB와 같은 ADAS 기술이 교통안전에 크게 기여하고 있음을 알 수 있다.(7)
Euro NCAP의 CPNC-50(Car-to-Pedestrian Nearside Child) 시나리오와 같이 시야가 제한된 영역에서 비교적 저속으로 이동하거나 정지된 장애물의 출현 시, 시험 차량의 전방 장애물 인식 시점이 last point to brake 지점 이전이라면 AEB로 감속하여 충돌을 회피할 수 있지만, 그렇지 않고 Fig. 1과 같이 last point to brake와 last point to steer 사이를 지나고 있는 경우, 종 방향 속도만을 제어하는 AEB만으로는 장애물과의 충돌을 피할 수 없게 된다.(8,9,10) 이와 같은 상황에서는 조향각 조절을 통해 차량의 횡 방향 거동을 제어하는 AES(Autonomous Emergency Steering)가 장애물과의 충돌 회피에 기여할 수 있을 것이다. 하지만, 이미 국내를 포함한 유럽 및 미국 등의 해외 여러 나라에서 점진적으로 장착이 의무화되고 있는 AEB와는 달리, AES에 대한 요구 성능 규정 및 관련법률 제정의 추진 등은 상당히 미진한 상황이라 할 수 있다. Euro NCAP에서 2025 Roadmap을 통해 2020년 AES safety rating을 공개하고 2022년까지 적용을 완료할 계획임을 밝혔지만,(11) 2022년 현재까지도 차대차(Car-to-Car) 또는 VRU(Vulnerable Road User) 시나리오의 AEB, ACC(Adaptive Cruise Control) 평가 프로토콜만이 제정 및 시행되고 있으며, 계획했던 AES 성능 시험 및 평가와 관련된 프로토콜 수립에 대한 공식적인 진행사항들은 아직 찾아볼 수 없다. 따라서, 전술한 AEB만으로 회피할 수 없는 긴급 상황에서 AES의 성능을 효과적으로 평가할 수 있는 평가 프로토콜에 관한 다면적인 연구 수행이 시급하다.

이에 새롭게 논의 및 제안하고자 하는 AES 시험 및 평가 프로토콜의 기존 타 프로토콜과의 방법론적 일관성 유지를 위해 AES의 핵심 목표인 충돌 회피(collision avoidance) 평가항목이 Euro NCAP 평가 프로토콜 내에서 어떠한 범주에 속하는지부터 분석한다. Euro NCAP에서는 통상적으로 차량에 옵션 사항으로 제공되고 있는 고속도로 주행 보조 시스템(highway assist systems)의 성능 시험 및 평가에 대한 프로토콜을 크게 지원 능력(assistance competence) 및 안전 백업(safety-backup)의 두 개 항목으로 구분하고 있다. 지원 능력 항목은 차량이 제공하는 운전지원(vehicle assistance) 수준과 운전자의 대응(driver engagement) 수준 사이의 적절성을 평가하며, 안전 백업은 운전자가 중요한 이벤트에 대응하지 못한 경우 시스템의 안전(fail-safe)한 정도와 이러한 비상 상황에서 어떻게 대응하는지를 평가하는 항목이다. 지원 능력 항목 중 차량의 운전지원에 대한 평가항목은 속도 보조(speed assistance), 적응형 순향 제어 성능(adaptive cruise control performance) 및 조향 보조(steering assistance)로 세분되고, 운전자 대응에 대한 평가항목은 소비자 정보 제공(consumer information), 시스템 상태(system status), 운전자 모니터링(driver monitoring) 및 혐력 운전(driving collaboration)으로 세분된다. 그리고 안전 백업 항목은 시스템 오류(system failure), 무응답 운전자에 대한 개입(unresponsive driver intervention) 및 충돌 회피로 세분된다. 이중 속도 보조, 운전자 대응 시험 프로토콜(driver engagement test protocol), 시스템 오류 및 무응답 운전자에 대한 개입 항목들과는 달리 적응형 순향 제어와 충돌 회피 항목들은 시험의 특성상 차대차 시나리오만을 평가하도록 규정하고 있으며, 이는 다시 선행 차량(LV, leading vehicle)과 목표 차량(GVT, global vehicle target)의 시나리오에 따라 CCRs(stationary target, stationary target in a curve), CCRm(moving target), CCRb(braking target), Cut-in 및 Cut-out 시나리오들로 세분된다. 여기서, 본 연구의 핵심 주제라고 할 수 있는 안전 백업의 충돌 회피 항목은 ACC와 같은 보조 운전 시스템(assisted driving system) 및 AEB와 같은 긴급 시스템(emergency system) 모두를 통합하여 시험 차량의 충돌 회피 성능을 평가하도록 하고 있다.
따라서, AES의 성능평가 역시 안전 백업 내 충돌 회피 항목에 해당하므로, Euro NCAP의 고속도로 주행 보조 시스템 시험 평가 프로토콜 중 안전 백업 항목 내 충돌 회피 시험 평가 프로토콜에 대하여 우선분석한 후, 이를 토대로 본 논문에서 제안하는 LV의 전방 긴급 장애물 회피에 따른 차대차 Cut-out 시나리오 기반 AES 성능평가 방법의 방법론적 적절성을 OpenSCENARIO 기반의CARLA 시뮬레이션을 통해 논하고자 한다. 이에 본 논문에서는 2장에서 현재 Euro NCAP에서 시행되고 있는 프로토콜과 제안하는 프로토콜에 대해서 기술하고, 3장에서는 시뮬레이션 환경과 방법에 대해서 기술한다. 4장에서는 ROS 기반의 오픈소스 자율주행 stack인 Autoware 및 CARLA를 사용하여 제안하는 차대차 Cut-out 시나리오 기반 AES 성능평가 방법을 Toyota Prius에 시험 적용하고 그 결과에 대해서 분석한다.
2. 시험 및 평가 시나리오
2.1. Euro NCAP의 Test Protocol
서론에서 언급한 Euro NCAP의 프로토콜 중 적응형 순향 제어와 충돌 회피에 각각 ACC와 AEB의 성능을 평가하는 시나리오가 기술되어 있다. 두 항목에 기술된 차대차 Cut-out 시나리오는 Fig. 1과 같이 LV, GVT, VUT(Vehicle Under Test) 총 3대의 차량으로 구성되며, LV와 VUT는 실제 차량, GVT의 경우 충돌 시 안전을 위해 실제 차량을 모사한 구조물을 사용한다. 시험은 GVT, LV, VUT 모두 같은 차선으로 주행하는 상황에서 시행되며, 주행 중인 LV와 정지해 있는 GVT 사이의 거리가 시나리오의 TTC(Time to Collision)에 해당하는 거리에 도달하게 되면, LV는 지정된 횡 가속도, 차선변경 길이, 곡률반경을 가지는 Cut-out을 횡 방향으로 3.5m 떨어진 인접 차선의 중심부까지 한다. 후행하고 있는 차량인 VUT는 주행 차선에서 벗어난 LV 대신 정지해 있는 GVT로 인해 충돌 위험 상황에 처하게 되며, Euro NCAP은 해당 상황에서 VUT의 ACC와 AEB 성능을 시험, 평가한다.

2.2. Cut-out 기반 AES Test Protocol 제안
전술한 ACC와 AEB 시나리오를 구분하는 차이는 Table 1에서 볼 수 있듯이 LV의 Cut-out시 TTC이다. ACC 시나리오의 경우 LV의 Cut-out 시 TTC는 3초이지만, AEB의 경우 2초이다. TTC가 짧아질수록 VUT는 정지해 있는 GVT를 보다 더 늦게 인지하고, 가까이 있는 상황이 되며, 긴급한 조작을 요구하기 때문에 TTC가 2초인 AEB 시나리오가 보다 더 위급한 상황으로 볼 수 있다. 그러나, 2초의 TTC가 적용된 경우에도 브레이크만을 통해 정지한 GVT를 회피할 수 있는 충분한 거리가 확보되어 AES의 개입 없이 AEB만으로 장애물을 회피할 수 있다. 이는 AES 평가에 적합하지 않으므로, LV의 Cut-out TTC를 1.5초와 1.0초로 기존 2.0초에서 각 0.5초, 1.0초 더 줄이고, 2.1절의 Euro NCAP 시나리오에서는 언급되지 않은 LV의 cut-out 시 LV와 VUT 간의 거리 또한 Table 1의 Max. distance between LV and VUT 항목에서 지정한 값을 넘지 않도록 제한함으로써 기존보다 더 위급한 상황을 조성하였다. 이를 통해, AES를 통한 스티어링 휠의 조작 없이, 브레이크에 의한 감속만으로는 GVT를 회피할 수 없도록 하였다. 이외에도, LV의 속도가 90kph인 경우를 추가하여 브레이크보다 스티어링 휠을 통한 회피가 더 효과적인 고속의 주행 환경에서 시험을 진행할 수 있도록 하였다.
Table 1.
Comparison of significant parameters in ACC, AEB and AES assessment protocols
2.3. 제안 시나리오의 VUT 평가방법
Euro NCAP의 프로토콜에서는 차량 보조 평가(vehicle assistance assessment)의 ACC performance 항목과 안전 백업 평가(safety backup assessment)의 충돌 회피 항목에서 각각 VUT의 ACC와 AEB의 성능을 평가한다. 두 항목 모두 공통으로 GVT와의 충돌 회피 시 1점, 충돌 시, 충돌 전 5kph 이상 속도를 감속하는 경우 0.5점, 그렇지 않다면 0점을 충돌 회피 점수로 부여하며, 이와 별도로 충돌 회피 항목은 충돌을 회피하지 못한 경우라도, TTC가 1.5초 이상인 거리에서 FCW가 작동하였다면 0.25점을 부여한다. 그러나 앞서 언급한 평가 요소들은 단순히 GVT와의 충돌 및 감속 여부, FCW의 작동 여부로만 점수를 부여하기 때문에, AES를 통한 충돌 회피 시, 회피 성공 여부와 회피 후 안정성에 중대한 영향을 미치는 스티어링 휠의 조작과 횡 방향 제어가 회피 성공 여부와 회피 후 안정성에 중대한 영향을 미치나, 이를 평가할 수 있는 항목이 없다. 이를 보완하기 위해 충돌 시의 횡 방향 오버랩(lateral overlap)과 변경한 차선에서의 차선 유지 항목을 평가에 추가한다. 횡 방향 오버랩은 Fig. 3과 같이 GVT와 겹치는 VUT 폭의 백분율로 정의되며, 이에 대한 배점은 두 차량이 충돌할 때의 횡 방향 버랩을 측정하여 정면충돌을 의미하는 100%는 0점, 100%에서 25%가 줄어들 때마다 0.25점씩 점수를 부여해 완전한 회피인 0%는 1점으로 총 5가지 상황으로 구분한다. 차선 유지에 대한 배점은, VUT의 AES 활성화 후 충돌 회피를 위한 차선변경 시, 변경한 차선을 유지하는 정도로 나누었다. 변경한 차선을 유지하면 1점, 차량의 일부 바퀴가 바깥쪽 차선을 밟으면 0.5점, 4바퀴가 모두 밟으면 0점을 부여한다. 추가된 평가항목을 통해 각 시나리오 당 완전한 충돌 회피 시 충돌 회피 점수로 1점, 오버랩 점수로 1점, 차선 유지 점수로 1점을 받아, 총 3점을 획득할 수 있다.

3. 시뮬레이션
3.1. 환경 구성
2장에서 제안한 시나리오의 시뮬레이션을 위한 환경 구축에 CARLA 0.9.13 시뮬레이터와 Autoware.AI 기반으로 개발된 자율주행 stack을 사용하였고, 둘을 CARLA-ROS bridge로 연결해 실험 환경을 구성하였다. 구성된 환경에서 2.2절에서 제안한 시나리오를 구현하기 위해, CARLA scenario runner가 지원하는 ASAM OpenSCENARIO 포맷의 xosc 파일로 시나리오를 작성하였으며, CARLA에서 제공하는 지도 중 약 260m의 가장 긴 직선주로를 가지고 있는 Fig. 4의 Town04를 사용하였다. 또한, 고속도로 환경의 시험임을 고려해 AES 기능 활성화 지점이 고속도로와 유사한 환경이 되도록 지도 중앙부의 직선 경로에 GVT를, GVT와 충분히 먼 거리에 LV과 VUT를 배치하여 두 차량이 충분히 가속한 후 직선주로 상에 정지해 있는 GVT로 접근할 수 있도록 하였다. 다만 CARLA scenario runner의 제한사항으로 인해 OpenSCENARIO 사용 시, xosc 파일 내부의 LaneChangeAction에서 정의되는 차선변경 파라미터를 완벽히 지원하지 않는다. 그러므로 2.1절과 Table 1에서 언급하였던 lane change maneuver of LV의 항목 중 Distance to GVT를 제외한 횡방향 가속도(lateral acceleration)와 곡선부의 곡률반경(radius of turning segments)를 설정할 수 없는 문제가 있다. 해당 문제로 인해 LV의 차선변경 경로를 제안한 시나리오와 일치하게 설정할 수 없으나, 본 연구에서 논하고자 하는 AES 성능평가 방법의 적절성 자체에는 큰 영향을 끼치지 않으므로, 각 시나리오의 Distance to GVT 값만을 적용하며 실험을 진행하였다.

3.2. 차량 구성
시뮬레이션은 총 3대의 차량과 2가지 차종이 사용되었으며, VUT에 Toyota Prius를, LV과 GVT에 Tesla model3를 사용하였다. 사용된 차량은 모두 CARLA에서 기본 제공하는 asset이고, physics 관련 설정은 모두 이에 포함된 기본값으로 사용하였다. 차량 제어의 경우, LV는 CARLA의 자체 컨트롤러를 사용하나, VUT는 자율주행 stack에서 제어하므로, stack에 필요한 입력으로 사용하기 위한 센서로 Fig. 5(a)와 같이 VUT의 차량 상단에 IMU, GNSS, 32채널 LiDAR, 차량 전면에 200m의 탐지거리를 갖는 RADAR를 부착하여 각 센서의 출력 데이터를 사용하였다. LiDAR와 RADAR에서 출력되는 point cloud 데이터는 전방의 차량 회피에 사용되며, IMU와 GNSS는 차량의 localization에, speedometer는 속도 제어에 사용된다. 실제 CARLA내 주행 환경은 Fig. 5(b)와 같으며, pointcloud와 생성된 경로를 시각화하여 실시간으로 확인할 수 있도록 하였다.

3.3. 자율주행 stack 구성
VUT에 부착된 각 센서의 데이터와 VUT 제어 명령은 각각 Fig. 6과 같이 자율주행 stack의 입력과 출력으로 사용되며, CARLA-ROS bridge의 CARLA API를 통해 전달된다. VUT는 GNSS와 IMU를 사용하여 localization을 수행하며, RADAR로부터 출력되는 point cloud는 지면 point를 필터링한 후 클러스터링하여 전방 차량의 감지에 사용한다. 차량 감지 시, 클러스터링 된 RADAR의 point cloud에서 range와 velocity 데이터를 이용해 전방 차량까지의 거리와 속도를 인식한다.

Path 생성에는 Openplanner를 사용하며, 전방에 충돌 위험이 없으면, 차선의 centerline에 정렬된 local path를 pure pursuit 알고리즘을 통해 추종한다. 만약, 본 시나리오에서 제안한 바와 같이, 인식된 전방 차량과 충돌 위험이 감지되고 AEB를 통한 충돌 회피가 불가능할 것으로 예상되는 경우, VUT의 AES 기능이 작동한다. AES 작동 시, Fig. 7과 같이 인접 차선으로 cut-out하는 local path가 생성되고 이를 추종하여 전방의 차량을 회피한다.

3.4. 시뮬레이션 결과
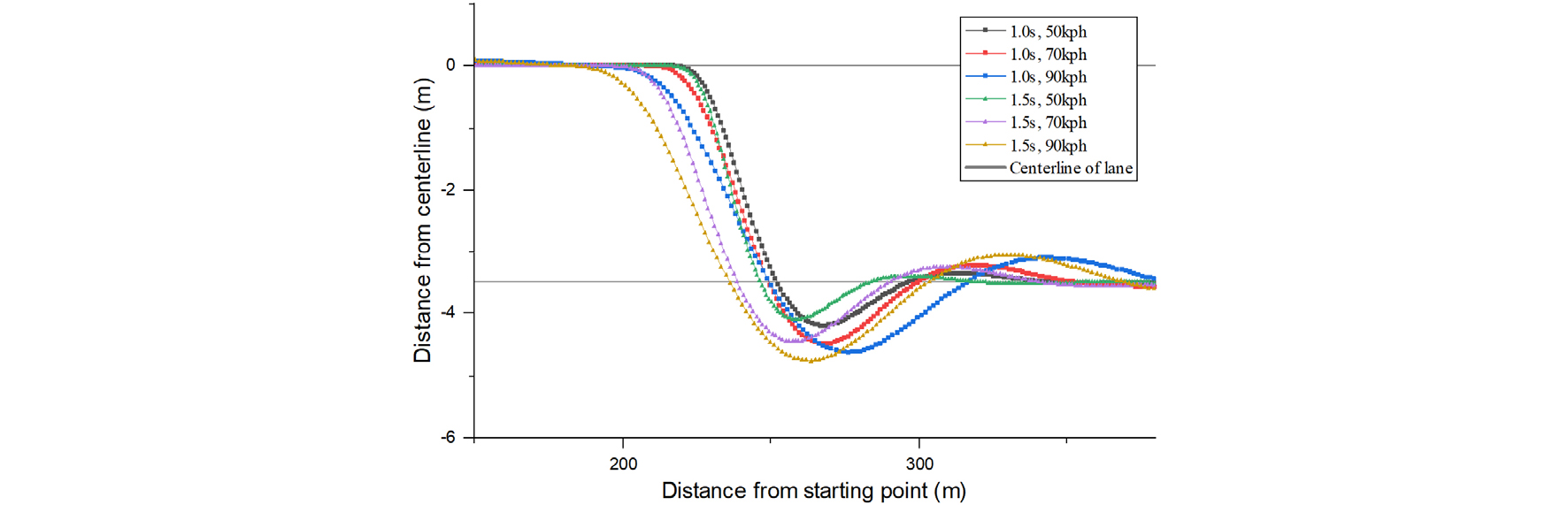
시뮬레이션은 3장에서 설명한 환경에서 LV와 VUT 각 차량의 속도를 2장에서 제안한 Table 1에 기재된 AES 시험 프로토콜의 값으로 설정하여 시험 및 평가하였다. 시험 과정에서 VUT의 주행궤적은 20Hz의 주기로 기록하였다. TTC와 속도에 변화에 따른 시나리오 각각에 대해 Fig. 8과 같이 각 그래프의 곡선으로 VUT의 경로를 표현하였고, LV의 설정 속도를 기준으로 각 시나리오에 해당하는 경로의 속도를 표기하였다. TTC가 1.5초인 시나리오에서 최대 횡 방향 변위는 4.75m, TTC가 1.0초인 경우 4.63m로 나타났으며, 속도가 증가할수록 횡 방향 변위 또한 증가하고, 차로의 중앙(centerline)에 수렴하기까지의 거리가 멀어지는 경향을 확인하였다.
각 시험 시나리오에 대한 항목별 평가 결과는 Table 2와 같다. 모든 시나리오에서 VUT는 GVT와의 충돌을 회피하였으며, 회피 후 변경된 차선에서의 차선유지 항목에서만 점수의 차이를 보였다.
Table 2.
Test and assessment result
4. 결 론
본 연구는 고속도로 주행 시, LV의 전방 장애물 회피에 따른 후행 차량인 VUT의 AES기능에 대한 시험 및 평가 프로토콜을 제안한다. 제안할 프로토콜의 방법론적 일관성 유지를 위해, AES를 통한 충돌 회피가 Euro NCAP의 평가 프로토콜 중 highway assist systems의 collision avoidance에 속함을 확인하였고, 이에 대응하는 차대차 Cut-out 기반 AES 시험 및 평가 프로토콜을 제안하였다. 제안하는 프로토콜의 시험 시나리오는 LV의 TTC와 속도에 따라 6가지로 나누었으며, 평가는 충돌 회피, 횡 방향 오버랩, 차선유지 3가지 항목으로 이루어진다.
제안한 프로토콜의 검증을 위한 시뮬레이션에는 CARLA를 사용하였다. Autoware 기반 자율주행 stack을 개발하여 CARLA 내 VUT의 제어에 사용하였고, LV와 GVT의 제어에 scenario runner를 사용하여 제안한 프로토콜에 따른 시험 및 평가를 진행하였다. 이를 통해, 제안한 프로토콜로 VUT의 AES 기능에 대한 정량적 평가가 이루어질 수 있음을 확인하였다. 안전에 관한 관심이 높아지고, 각종 안전 보조 기능이 차량에 장착되고 있으나 AES에 대한 요구 성능 규정과 관련 법률 등은 이에 미치지 못하고 있다. 이에 본 연구에서 제안한 프로토콜과 시뮬레이션 환경을 통해 차량의 AES 성능을 평가, 개선하여 사고 감소와 새로운 시험 및 평가 프로토콜 제작에 기여할 수 있을 것이다.
