

1. 서 론
세계 인구수가 매년 1.1% 증가함과 동시에 자동차 역시 그 수가 지속적으로 증가하고 있다. 국내 자동차 시장은 2020년 69만대가 증가하여 2019년 대비 차량 등록 대수는 1.45배 증가하였다.(1) 이로 인해 도로 정체는 물론 충돌 사고 빈도가 증가하였으며,(2) 개인별 경제적 손실을 야기하고 있다. 그로 인하여 국내는 물론 해외에서도 충돌 사고 시나리오 연구가 활발히 진행 중이다. 유럽 연합인 EU에서는 유럽 도로에 모든 교통사고는 90% 이상 운전자 과실이라고 보고하였으며,(3) 현재 도로상에 있는 차량이 자율주행차량으로 대체된다면 충돌 사고 위험은 크게 줄어들 것이라 예측하고 있다.(4) 도로상의 많은 차량이 자율주행차량으로 대체되어도 새로운 안전 문제는 야기될 가능성이 있다.
도로상에서 자율주행자동차와 인간이 운전하는 자동차가 함께 운행할경우의 교통사고를 예측하기 위하여 유럽 연합에서는 OSCCAR(3) 프로젝트를 수행하고 있다. OSCCAR는 유럽 내 12개의 국가가 모여 자율주행차량 충돌 사고 시나리오를 연구하고, 이 시나리오를 바탕으로 미래의 자동차 실내 변형과 함께 충돌 시 인체 보호 및 상해에 관련된 연구를 진행 중이다. 이 프로젝트는 크게 D1.1(Accident data analysis - remaining accidents and crash configurations of automated vehicles in mixed traffic)과 D2.1(Test Case Matrix and selecting Demonstrator Test Cases)로 나뉘고 있으며, D1.1에서는 고도화된 자율주행차량이 어떤 사고에 노출되고 그에 따른 충돌 구성을 어떻게 분류하는지부터 연구를 시작한다. OSCCAR에서 사용되는 사고 데이터베이스는 유럽 연합에 실사고 데이터베이스를 활용하며, 독일의 GIDAS(5)와 스웨덴의 STRADA(6)가 대표적인 사고 데이터베이스이다.
OSCCAR 프로젝트에서는 사고 데이터베이스를 바탕으로 미래 사고 시나리오를 결정하기 위해 2단계에 걸쳐 사고데이터를 분류하였다. 첫 번째 방식으로는 상향식 접근법으로 현재 유럽 내에서 발생하고 있는 사고를 바탕으로 차량에 적용되는 보조안전장치 기술을 통해 배제할 수 있는 사고를 제외하였다. 두 번째 방식인 하향식 접근법을 사용하여, 상향식 접근법을 통해 제거하고 남은 잔여 사고 중 사고 관련 차량을 각각 자율주행차량으로 변경하였을 경우 배제할 수 있는 사고를 제외하였다. 남아 있는 사고 사례를 재구성한 뒤 그룹화를 진행하고, 가상 자율주행차량을 모델링하여 남아 있는 잔여 사고를 바탕으로 시뮬레이션을 진행하여 어떤 사고가 발생하고, 충돌 당시 차량별 충돌 포인트가 어디인지 확인하였다. 하지만 공개된 OSCCAR 보고서 내에 시뮬레이션 진행 방법론 및 시뮬레이션 조건은 상세히 설명되어 있지 않다. 사고 데이터베이스 선택, 사용 가능한 데이터, 변수 및 해석 등에 대한 상세한 내용을 찾을 수 없다. 결과 부분에서도 유럽 사고 상황 및 통계에 가중치를 두지 않았다고 설명하고 있다.
국내 역시 자율주행차량 시나리오 연구가 활발히 진행하고 있다. 국내 차량 사고 관련 사고데이터의 연구사례의 경우, 교통사고 분석시스템(TAAS)에서 제공하는 데이터를 기반으로 분석한 사례는 일부 존재한다.(7,8) 그러나 TAAS에서는 차량 사고의 파손 부위, 파손 심도을 제공하지 않고 있다.(9)
따라서, 본 연구에서는 사고 영상이 포함된 국내 교차로 사고 200건의 실사고 데이터를 바탕으로 교차로 사고 상황에서 발생하는 사고 중 가장 많은 사고 순으로 정리 및 교차로 사고 유형을 분석하였다. 또한, 가장 많은 사고 중 대표적인 사고를 선택하여 사고를 재구성하였다. 해당 사고 관련 두 차량을 각각 가상 자율주행차량으로 변경하여 동일 사고에 대하여 사고 경향이 어떻게 이루어지는지 확인해보았다.
2. 국내 사고 데이터 분석
본 연구에 사용한 사고데이터는 2015년부터 2019년까지 총 5년간의 국내 교차로에서 발생한 실사고 데이터 200건을 활용하였다. Fig. 1은 교통사고 분석보고서 중 하나인 사고 개요서이다.(10) 사고 개요서에는 사고 당시 확인된 차량 정보, 주행 환경, 도로 환경 및 주행 상황 등이 보기 쉽게 나타나 있으며, 또한 차량 파손 부위 및 사고 1초 전부터 사고 시까지를 확인할 수 있는 영상 사진이 포함되어 있다. 본 연구에서는 이를 토대로 사고재구성 프로그램인 PC- CRASH(11)를 활용하여 사고재구성을 진행하였다. 또한, 200건에 교차로 실사고 데이터를 바탕으로 사고 형태별로 분류하여 교차로 내에서 어떠한 사고가 발생하는지를 도식화하였다.

200건의 교차로 사고 중 가장 많은 건수로 확인된 사고로는 LT/OD-SC(자차 좌회전 중 반대편 차량 직진) 사고이며, 200건의 사고 중 27건에 사고가 이에 해당한다. 두 번째로 많이 발생한 사고는 200건의 사고 중 26건에 해당하는 SC/OD-LT(자차 직진 주행 중 반대편 차량 좌회전) 사고이다.
Table 1을 바탕으로 국내 교차로 사고 200건 중 가장 높은 비율을 차지하는 LT/OD-SC(13.5%)와 SC/OD-LT(13.0%), 이 두 가지 교차로 사고를 대표 사고로 선정하였다. Table 2, Table 3과 같이 사고 당시에 평균 속도 및 속도 범위를 산출하였으며, 27건의 해당하는 사고인 LT/OD-SC 사고 상황에서 좌회전하는 자차의 경우 평균 속도는 22.9km/h로 충돌하며, 직진하는 상대 차량의 평균 속도는 49.0km/h의 속도로 확인되었다. 또한, 자차는 충돌 1초 전부터 충돌 직전까지 11.2~46.4km/h의 속도 범위를 가지지만, 반대편 차량인 상대 차량의 경우, 20.2~81.7km/h의 속도 범위를 가지는 것을 확인할 수 있었다.
Table 1.
Accident type target classification
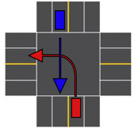


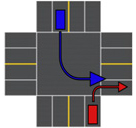

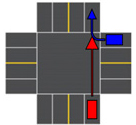

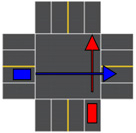
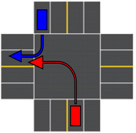



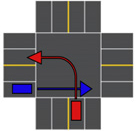
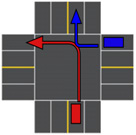
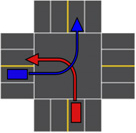
Table 2.
LT/OD-SC Speed at the time of the accident
Table 3.
SC/OD-LT Speed at the time of the accident
200건 중 26건에 해당하는 사고인 SC/OD-LT 사고의 경우, 직진하는 자차의 경우 평균 속도 45.2km/h로 확인되었으며, 좌회전하는 상대 차량의 경우, 평균 속도는 23.8km/h로 확인되었다. 또한, 사고 1초 전부터 사고 당시의 속도 범위로는 자차의 경우 속도 범위 22.0~70.6km/h였으며, 상대방 차량에 속도 범위는 13.0~41.8km/h 였다. 자차와 상대방 차량 모두 좌회전 시 속도를 줄여 그 속도 범위가 작은 것을 알 수 있었으며, 직진하는 차량의 경우에는 저속에서부터 고속까지 넓은 범위의 속도 분포가 나타나는 것을 확인할 수 있었다. 이를 바탕으로 실제 사고가 어떻게 발생하였는지, 상용 프로그램인 PC-CRASH를 활용하여 두 가지 사고 상황인 LT/OD-SC, SC/OD-LT에서의 자차와 상대방 차량의 사고재구성을 시뮬레이션하였다.
3. 교차로 사고재구성
사고 개요서를 바탕으로 200건의 실사고 데이터 중 가장 많은 순으로 발생한 교차로 사고 구성인 LT/OD-SC와 SC/OD-LT의 사고 사례 각각 1건의 사고를 선정하여, 사고 재현 프로그램인 PC-CRASH를 통하여 사고재구성을 진행하였다. 사고 개요서는 보험사에서 확보한 사고 영상을 통해 사고 시점을 기준으로 1초간 평균 이동 거리를 위성 지도에서 찾아 표시하고, 이를 기반으로 주행 속도를 산출하여 차량의 움직임을 도식화한 내용이 포함되어 있으며, 아래 Fig. 2와 같이 나타낸다. 또한, 주변 차량과 주변 도로 상황, 신호 등 사고 당시 주변 상황 내용이 간략하게 설명되어 있다.

사고재구성을 위해 사용된 LT/OD-SC 사고는 자차 좌회전 중 반대편 차량이 직진하는 교차로에서의 사고이다. 자차가 황색 점멸 신호에서 좌회전 중 반대 방향에서 직진하는 차량과 충돌한 사고이며, 좌회전하는 자차는 반대 방향에서 진입하던 트럭에 의해 충돌하는 차량을 인지하지 못하고 좌회전 중에 충돌한 사고이다. 자차는 현대자동차의 제네시스330 차량이며, 반대 차량은 현대자동차의 엑센트이다. 충돌 당시 자차의 속도는 24.5km/h, 반대 차량의 속도는 36.4km/h였으며, Fig. 3과 같이 사고재구성을 진행하였다. 사고재구성을 정확히 하기 위해 사고 1초 전부터 사고 당시까지의 영상을 통해 프레임을 맞추었으며 해당 그림은 Fig. 4와 같다. 시뮬레이션 결과는 iGLAD(12,13) 양식에 맞추었으며, Table 4와 같다. 자차의 충돌 전 속도는 23.0km/h 였으며, 충돌 후 속도는 19.7km/h 이다. 속도 변화는 14.0km/h, 평균 감가속도는 3.1m/s2, 감속 거리 7.7m 및 각도 변화는 37.3deg로 정리하였다.


Table 4.
LT/OD-SC Simulation result
반대 차량에 경우, 충돌 전 속도는 34.9km/h 였으며, 충돌 후 속도는 10.8km/h 이다. 속도 변화는 24.0km/h, 평균 감가속도는 7.5m/s2, 감속 거리 10.7m 및 각도 변화는 1.0도로 결과를 도출하였다.
LT/OD-SC 사고 다음으로 많은 건수를 보인 SC/OD-LT 사고재구성 결과는 Fig. 5와 같다. 자차 직진 신호를 받고 직진 주행 중, 반대 방향에서 비보호 좌회전하는 차량과 충돌이 발생한 사고로서 자차의 속도는 70.6km/h 였으며, 반대편 상대방 차량 속도는 30.2km/h 이었다. 앞서 진행하였던 시뮬레이션과 동일한 방법으로 SC/OD-LT 사고에 대해 사고재구성을 진행하였으며, 시뮬레이션 결과 영상은 사고 1초 전과 사고 시점에 대해 프레임을 맞추었으며, 영상에서 보이는 결과는 Fig. 6과 같다. 시뮬레이션 결과는 Table 5와 같으며, iGLAD 양식에 맞추어, 자차의 충돌 전 속도는 69.1km/h, 충돌 후 속도는 33.9km/h, 속도 변화는 41.3km/h, 평균 감가속도는 12.5m/s2, 감속 거리는 21.5m, 각도 변화는 25.8deg로 나타났다. 또한, 반대편 상대 차량의 경우 충돌 전 속도 29.4km/h, 충돌 후 속도 21.5km/h, 속도 변화 46.0km/h, 평균 감가속도 2.6m/s2, 각도 변화는 128.7도이다.


4. 자율주행차량 시뮬레이션
3절에서 수행하였던 사고재구성 시뮬레이션을 기반으로 국내 교차로 사고 2건인 LT/OD-SC와 SC/OD-LT 사고에 대하여 자율주행차량으로 각 차량을 변경하였을 때, 사고 여부를 확인하기 위하여 자율주행차량 시뮬레이션을 진행하였다. Table 6은 자율주행차량 사고 시나리오 구성을 위한 시뮬레이션 조합이다. 기존 사고를 재구성한 결과를 기준 시뮬레이션으로 설정하여 1번 차량과 2번 차량 모두 일반 차량으로 설정하였으며, 시뮬레이션 조합1은 1번 차량이 자율주행차량, 시뮬레이션 조합2는 2번 차량이 자율주행차량, 시뮬레이션 조합3은 두 차량 모두 자율주행차량으로 구성하는 시나리오이다.
Table 6.
Autonomous vehicle scenario configuration
| Vehicle | #1 | #2 |
| Basic Simulation | General Car | General Car |
| Treatment 1 | Autonomous vehicle | General Car |
| Treatment 2 | General Car | Autonomous vehicle |
| Treatment 3 | Autonomous vehicle | Autonomous vehicle |
교차로 사고 시나리오 시뮬레이션을 진행하기 위해 가상 자율주행차량 모델링을 진행하였다. 본 연구에서 사용된 자율주행차량 모델의 기본은 AEB가 적용된 차량으로 개념을 정의하였다.
또한, 이전 연구인 OSCCAR(4)에서 자율주행차량의 센서 특성을 동일하게 구성하여 시뮬레이션을 수행할 수 있도록 하였다. 센서 특성은 Fig. 7과 같다. 200m 거리를 측정할 수 있는 센서에 센서 범위는 180°(±90°) 감지 범위를 갖도록 설계하였으며, 브레이크는 충돌이 예상되는 시간(TTC) 1.2초 미만인 경우, AEB가 활성화되도록 설정하였다.

Table 6에 시나리오를 기준으로 PC-CRASH를 활용하여 자율주행차량 시뮬레이션을 진행하였다. 시뮬레이션 결과는 Fig. 8, Fig. 9와 같다. LT/OD-SC 사고에 경우, 자율주행차량으로 변경된다면 모든 시나리오 조합에서 사고를 회피하는 경향을 확인할 수 있다.


SC/OD-LT 사고에 경우, Fig. 9(b)에 시뮬레이션 조합 2번인 상대 차량이 자율주행차량인 경우에 사고가 발생하는데, 이는 상대 차량(자율차)이 반대 차선에서 다가오는 자차를 확인하고 AEB는 활성화되지만, 자차(일반차) 속도가 빠른 나머지 충돌이 발생하는 것으로 확인되었다.
Fig. 10과 같이 시뮬레이션을 초당 시간별로 나누어서 확인하였으며, 충돌 전 반대 차량(자율차)에 경우, Fig. 11에 그래프와 같이 자차(일반차)를 센서가 인식 후 충돌 1.5초 전에 브레이크를 밟았으며, 좌회전하는 경로 도중 차량이 멈추었다. 그러나 자차(일반차)에 경우, 멈추어있는 반대 차량을 확인하였으나 빠른 차속으로 인하여 충돌이 발생하였다. 충돌 직전 자차(일반차)에 차량 속도는 70.6km/h 였으며, 반대 차량(자율차)에 속도는 0km/h 였다. 또한, 충돌 직후 자차(일반차)의 경우 41.3km/h 속도로 충돌하였으며, 반대 차량(자율차)에 경우 33.9km/h 속도였다.


5. 결 론
본 연구에서는 국내 교차로 실사고 데이터를 기반으로 가장 많은 사고가 발생하는 대표 교차로 사고를 확인 및 분류하고, 이를 바탕으로 사고재구성 시뮬레이션을 진행하였다. 대표 교차로 사고로 LT/OD-SC와 SC/OD-LT 사고를 선정하였으며, 사고 당시 차량의 속도 및 충돌 구성을 확인하였다. 또한, 3가지 시뮬레이션 조합을 통해 선정한 대표 사고에 차량을 자율주행차량으로 변경하여 동일 조건에서 사고가 발생하는지를 확인하였다. 자율주행차량 모델링은 센서 범위 180°(±90°)에 200m, 차량 1대를 인지할 수 있는 AEB가 적용된 차량으로 모델링을 진행하였다. 본 연구의 향후 연구로는 고도화된 자율주행차량 모델링이 필요하며, 실사고 데이터베이스를 더욱 구축하여 다양한 도로 상황에서의 사고 시나리오 개발이 필요하다.
